Изобретение относится к способу компенсации искажения сигнала в излучающей полезной нагрузке посредством введения подходящего предварительного искажения или передаточной функции компенсации в совокупную характеристику упомянутой полезной нагрузки.
Способ является особенно подходящим для космических применений, и более конкретно, для генерирующих полезных нагрузок, таких как навигационные полезные нагрузки.
Применение сигналов предварительного искажения полезной нагрузки, чтобы компенсировать вызванные полезной нагрузкой линейные и/или нелинейные искажения, известно в области телекоммуникационной техники. Эти функции компенсации часто реализуются в одном из компонентов бортового оборудования, например линеаризаторе в РЧ (радиочастот) усилителе большой мощности, как правило, обеспечивающем нелинейное ослабление, или эквалайзере, включающем в себя каскад настраиваемого фильтра, обеспечивающий сглаживание линейного отклика в частотной области. См., например, документ Maria-Gabriella Di Benedetto и Paola Madarini "Применение Предварительного искажения MMSE в Системах OFDM", IEEE Transactions in Communications, Том 44, № 11, ноябрь 1996.
Определение подходящей передаточной функции компенсации требует одновременного знания входного сигнала полезной нагрузки и соответствующего выходного сигнала. Однако измерение входного сигнала не всегда является целесообразным, особенно в случае генерирующей полезной нагрузки. Фактически генерирующие полезные нагрузки формируют внутренним образом свой собственный входной сигнал; и осуществление доступа к упомянутому входному сигналу требует установки ответвителей внутри полезной нагрузки, что добавляет вес, ошибки калибровки и сложность, и что в принципе создает ограничения доступа (например, физическое вмешательство инженера-испытателя, манипуляция открытия/повторного закрытия панелей доступа или составных шлангов для достижения точек измерения, сцепления/расцепления соединителей). Цель изобретения состоит в том, чтобы обеспечить способ компенсации искажения сигнала в излучающей полезной нагрузке, без необходимости получения входного сигнала упомянутой полезной нагрузки.
Другая цель изобретения состоит в том, чтобы обеспечить способ компенсации искажения, который является простым для осуществления и устойчивым к изменениям параметра отдельного компонента (оборудования) полезной нагрузки и допускам для отдельных компонентов полезной нагрузки.
Еще одна цель изобретения состоит в том, чтобы обеспечить гибкий способ компенсации искажения, работающий с почти любой констелляцией модуляции сигналов и требующий минимальных допущений для характеристик сигнала и полезной нагрузки.
Еще одна цель изобретения состоит в том, чтобы обеспечить способ компенсации искажения, который может осуществляться во время работы полезной нагрузки, не требуя прерывания обслуживания.
Способ изобретения особенно хорошо подходит для генерирующих полезных нагрузок, и конкретно, для навигационных полезных нагрузок, однако не ограничен этой конкретной областью. Он может также быть применен, например, для телекоммуникационных полезных нагрузок, чтобы оптимизировать Межсимвольную Интерференцию, и для полезных нагрузок радиолокатор с синтезированной апертурой для уменьшения сдвигов оценок дальности.
Согласно изобретению, по меньшей мере, некоторые из этих целей могут быть достигнуты с использованием способа компенсации искажения сигнала в излучающей полезной нагрузке, содержащего определение передаточной функции компенсации и включение ее в совокупную характеристику упомянутой полезной нагрузки, причем способ характеризуется тем, что содержит:
(a) выбор начальной предполагаемой передаточной функции компенсации и применения ее к совокупной характеристике упомянутой полезной нагрузки;
(b) получение выходного сигнала упомянутой излучающей полезной нагрузки;
(c) на основе упомянутого полученного выходного сигнала и опорного сигнала, соответствующих ожидаемому неискаженному выходному сигналу, выполнение оценки передаточной функции остаточного искажения упомянутой излучающей полезной нагрузки; и
(d) на основе упомянутой оценки упомянутой передаточной функции остаточного искажения, вычисление обновленной предполагаемой передаточной функции компенсации.
Предпочтительно, этапы (b) к (d) повторяются многократно, пока не удовлетворяется целевое условие, указывающее, что была достигнута удовлетворительная компенсация искажения сигнала.
Предпочтительно, оценка выполняется с использованием подхода "черного ящика", и опорный сигнал создается "искусственно", то есть он не является сигналом, измеренным внутри полезной нагрузки.
Предпочтительные варианты осуществления изобретения описаны в приложенных зависимых пунктах формулы изобретения.
Конкретным предпочтительным признаком изобретения является использование опорного сигнала, который не измеряется внутри полезной нагрузки, таким образом устраняя потребность в нежелательных ответвителях сигналов.
Благодаря использованию техники оценки черным ящиком, нет потребности в подробном знании работы полезной нагрузки, требуются только минимальные предположения. В целом, требуется, чтобы характеристика полезной нагрузки являлась временно постоянной по времени и не обладала памятью (без памяти), и опорный сигнал являлся постоянным по времени. Это обеспечивает большую гибкость способу согласно настоящему изобретению.
Интересной особенностью изобретения является то, что линейная функция компенсации может использоваться для того, чтобы компенсировать совокупное искажение, включая нелинейные вклады.
В случае применения к полезным нагрузкам космических аппаратов способ согласно изобретению может осуществляться как в наземных условиях, так и в космосе. В последнем случае нет необходимости прерывать работу, так как номинальный рабочий выходной сигнал может использоваться для определения необходимой передаточной функции компенсации.
Изобретение также относится к излучающей полезной нагрузке, включающей в себя средство для предварительной компенсации искажения сигнала, выполненное с возможностью осуществления упомянутого способа.
Изобретение будет далее описано подробно со ссылкой на приложенные чертежи, представленные только для иллюстрации, без намерения ограничивать объем изобретения.
Фиг. 1 показывает соотношение между сигналом и требованиями полезной нагрузки, как правило, используемыми в навигационных, коммуникационных и радарных приложениях;
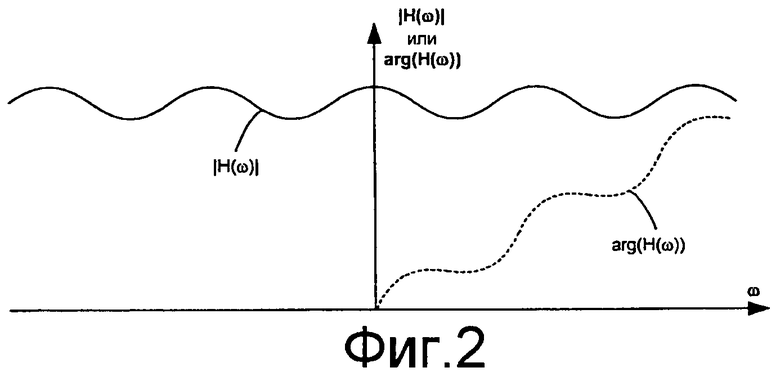
Фиг. 2 показывает графики амплитудных и фазовых компонентов передаточной функции синусоидального искажения;
Фиг. 3A-3F показывают воздействие передаточной функции искажения по фиг. 2 на примерный входной сигнал;
Фиг. 4A-4E показывают воздействие искажения на корреляционную функцию выходного сигнала обычного режима работы согласно дополнительному примеру.
Фиг. 5A-5C схематично представляют основные механизмы генерации совокупного выходного сигнала;
Фиг. 6 показывает упрощенную блок-схему генерирующей излучающей полезной нагрузки;
Фиг. 7 показывает высокоуровневую блок-схему последовательности операций способа согласно варианту осуществления изобретения;
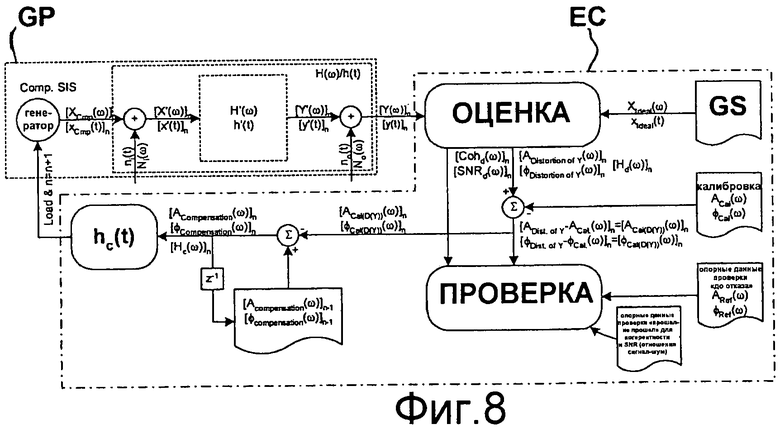
Фиг. 8 показывает подробную блок-схему способа согласно варианту осуществления изобретения;
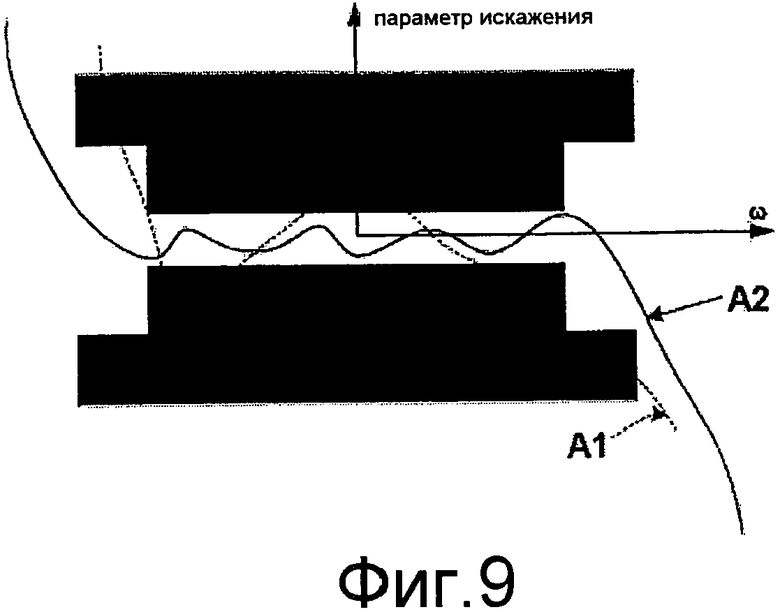
Фиг. 9 схематично представляет пример целевого условия согласно варианту осуществления изобретения;
Фиг. 10A-10E показывают пример итерации процесса компенсации с графиками остаточного искажения амплитуды и фазы, с использованием способа согласно изобретению;
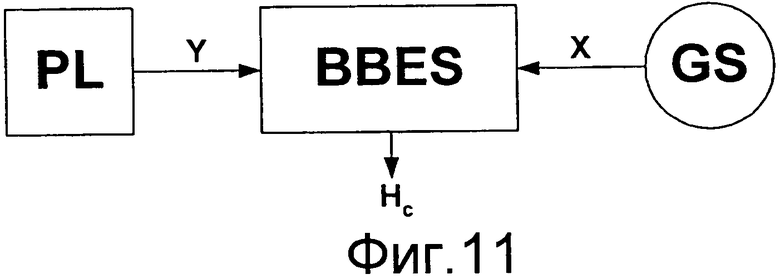
Фиг. 11 иллюстрирует принцип на основании изобретения;
Фиг. 12A-12F показывают пример практических результатов применения способа согласно изобретению в полезной нагрузке прототипа.
Разработка спутниковых полезных нагрузок, в общем, осуществляется на трех основных фазах: фаза проектирования, фаза компоновки, интеграции и проверки (AIV) и эксплуатационная фаза. Во время этих типичных фаз оптимизация точности рабочей характеристики сигнала в пространстве (SIS) требует специализированного подхода для генерирующего типа полезных нагрузок, таких как навигационные полезные нагрузки. Точность рабочей характеристики SIS является основным инструментом для удовлетворения рабочих характеристик всей системы, например Ошибки Эквивалентной Дальности Пользователя (UERE), важного параметра, свойственного навигационным применениям.
Точность рабочей характеристики SIS представляет количество нежелательных совокупных искажений, включенных в SIS.
Список, приведенный ниже, суммирует главные параметры системного уровня, оказывающие влияние на EURE, вследствие совокупных неидеальностей SIS (таким образом, исключая вклады от пути передачи и от земли, такие как вытекающие из многолучевой среды):
- Сдвиг S-кривой (SCB);
- Потери корреляции (CL);
- Изменения групповой задержки (GD);
- (де-)когерентность Кода/Несущей (Code/Carrier Coherency; CCC);
- дисперсия Аллана (AV); и
- Фазовый шум (PN).
Нужно отметить, что перевод этих параметров системного уровня в требования конструктивной реализации не является очевидным и часто требует моделей со сложной архитектурой. Например, сдвиг S-кривой и потери корреляции, как правило, интерпретируется на уровне навигационного приемника как добротность рабочей характеристики, и поэтому их перевод в требования конструктивной реализации полезной нагрузки не является очевидным.
Следующий список суммирует типичные требования конструктивной реализации полезной нагрузки:
- Характеристика искажения амплитуды и фазы H;
- Некогерентное искажение (NCD), включенное в H в определенных условиях;
- Групповая задержка (GD), включенная в H как производная фазы по частоте;
- Когерентность кода/несущей (CCC), включенная в H, как искажение между фазой и групповой задержкой;
- дисперсия Аллана (AV), стохастическая; и
- Фазовый шум (PN); стохастический.
Этот список представляет типичные требования, используемые в среде конструкторов полезной нагрузки для навигационных, коммуникационных или радарных приложений, но особенно применяемые для навигационной области в случае, представленном выше. Нужно отметить, что процесс вывода требований для элемента между различными уровнями (Система, Полезная нагрузка, Оборудование, Модуль, Компонент) часто очень сложен. Это может быть вызвано вложенными или скрытыми взаимосвязями, которые также трудно смоделировать, или недостаточной точностью моделирования в целом. Фиг. 1 суммирует сложные взаимосвязи между SIS и требованиями полезной нагрузки, начиная от внешних зависимостей и далее к уровню между системой и полезной нагрузкой. Могут быть сформированы и подобные балансы более низкого уровня. Ясно, что оценка или конфигурирование суммарных высокоуровневых рабочих характеристик полезной нагрузки не тривиальны при составлении их из каждого отдельного вклада или элемента более низкого уровня.
Важным шагом к изобретению является замечание, что на уровне реализации полезной нагрузки большинство детерминированных свойств включено исключительно в характеристику искажения амплитуды и фазы H номинального рабочего выходного сигнала. Это верно при конкретных - но не слишком строгих - условиях, а именно: постоянство по времени (по меньшей мере, в ближайшей перспективе, то есть по шкале времени процедуры по определению передаточной функции компенсации, которая, таким образом, называется здесь и далее 'временной'), отсутствие памяти в характеристике полезной нагрузки и постоянство по времени опорного сигнала. Это позволяет получить некоторые суммарные свойства из полезной нагрузки SIS "совокупным" способом, то есть без потребности знать скрытые и сложные взаимосвязи и модели нижних и верхних уровней.
Рассмотрение существования совокупного свойства, включенного в SIS, и описание чистого искажения является важной особенностью изобретения. Нужно отметить, что изобретение, по меньшей мере, в его основной форме, имеет дело только с детерминированными и постоянными или квази-постоянными свойствами SIS. Предполагается, что стохастические компоненты оптимизированы другими средствами во время стадии проектирования полезной нагрузки, что соответствует общей технической практике, но их воздействие может также быть уменьшено стандартными подходами усреднения на приемной стороне, такими как интеграция фазового контура и использование пилотных каналов, что является не исчерпывающим примерным списком.
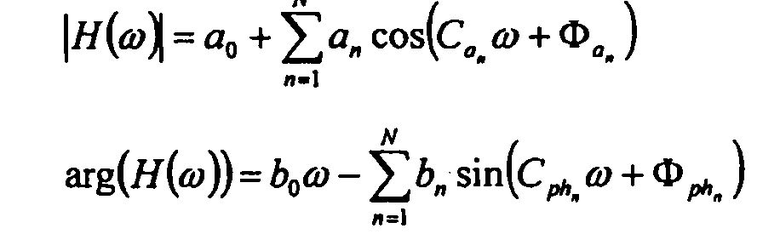
Воздействие совокупных искажений амплитуды и фазы, включенных в SIS, вызванных передаточной характеристической функцией H полезной нагрузки, формирует эффект искажений парного эха, как описано в публикации "Радиолокационные сигналы. Введение в теорию и применение", Charles E. Cook и Marvin Bernfeld, Artech House, Boston, London, ISBN 0-89006-733-3, Глава 11: Эффекты искажения в сигналах согласованного фильтра, стр.371-372, и приведены ниже с добавлением двух пояснительных примеров. Искажения суммарной полезной нагрузки по частоте могут быть описаны посредством общей функции H частотной передаточной характеристики, которая описывает искажения амплитуды и фазы одновременно. Сначала рассмотрим простую синусоидальную передаточную функцию искажения, компоненты амплитуды и фазы которой выражаются, в зависимости от угловой частоты ω, как:
|(H (ω))|=a0-a1 cos (Ca ω)
и
arg(H(ω))=b0 ω-b1sin(Cph ω)
(см. Фиг. 2).
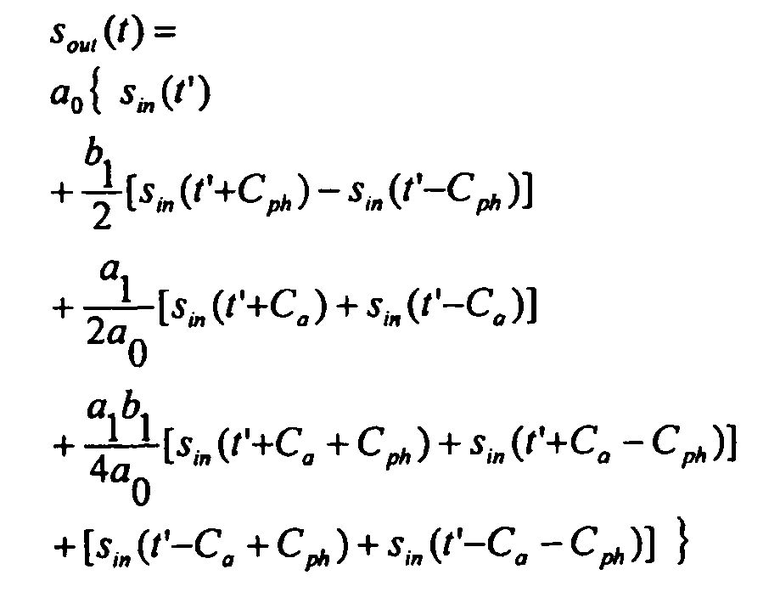
В общем, объединенный искаженный выходной сигнал по времени (t), может быть приблизительно описан как:
 (1)
(1)
где:
Sout(t) - искаженный выходной сигнал во временной области;
Sin(t') - неискаженный входной сигнал во временной области;
a0, a1 - коэффициенты искажения амплитуды;
b0, b1 - коэффициенты искажения фазы;
Ca - круговая частота колебания амплитуды по ω;
Cph - круговая частота колебания фазы по ω; и
t'=t-b0.
Интересно отметить, что не требуется задавать тип неискаженного входного сигнала Sin(t), что делает уравнение 1 пригодным к использованию для различных приложений. Искажения амплитуды и фазы, примененные к рабочему выходному сигналу, формируют смещенные копии неискаженного сигнала в форме парного эха, подобного тому, что происходит в среде многолучевого распространения, где формируются копии, интерферирующие с главным неискаженным сигналом.
Уравнение 1 показывает, что формируются две пары копий парного эха, каждая из которых связана с величиной искажения амплитуды и фазы соответственно. Во многих случаях последние четыре члена будут пренебрежимо малыми (см. также фиг. 3E), таким образом, нужно рассмотреть только первые пять членов, что приводит к следующему уравнению:
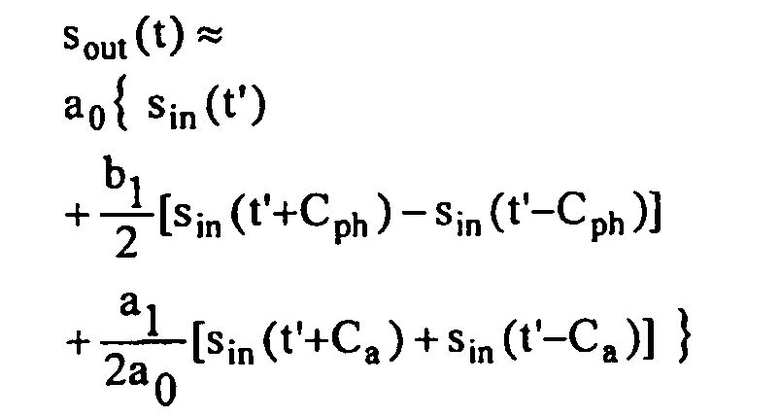 (2)
(2)
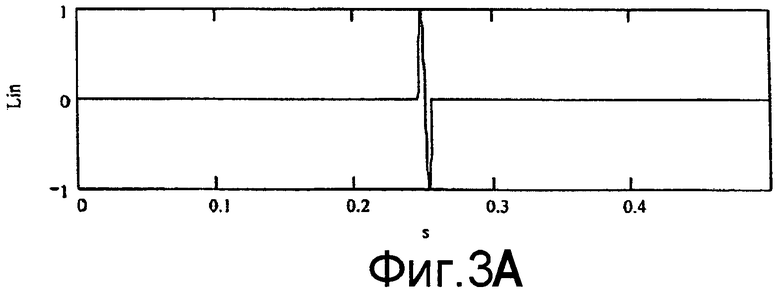
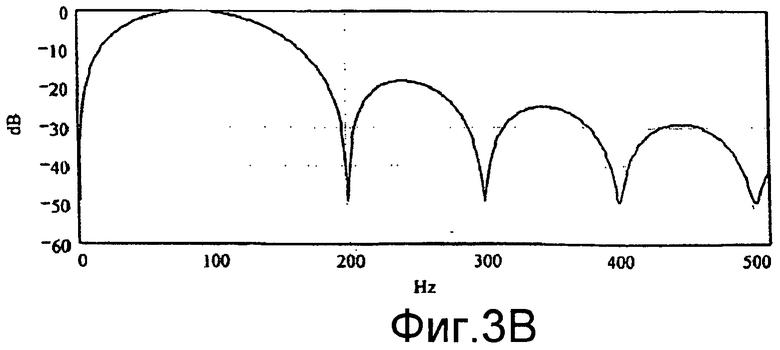
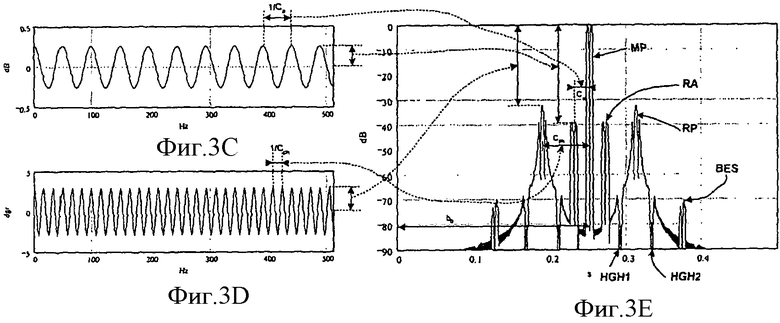
Наиболее интересным является то, что смещение по времени во временной области, Ca либо Cph, копий относительно главного сигнала непосредственно связано с периодом круговой частоты колебания в частотной области и что величина копий связана с величиной изменения амплитуды и фазы по частоте. Это продемонстрировано на фиг. 3A-3F, на которых:
- фиг. 3A представляет один цикл неискаженного сигнала во временной области;
- фиг. 3B - спектр упомянутого неискаженного сигнала;
- фиг. 3C и 3D - соответственно, амплитуда (логарифмическая шкала) и фаза (линейная шкала) передаточной функции H синусоидального искажения в частотной области;
- фиг. 3E - соответствующий искаженный сигнал (логарифмическая шкала) во временной области; и
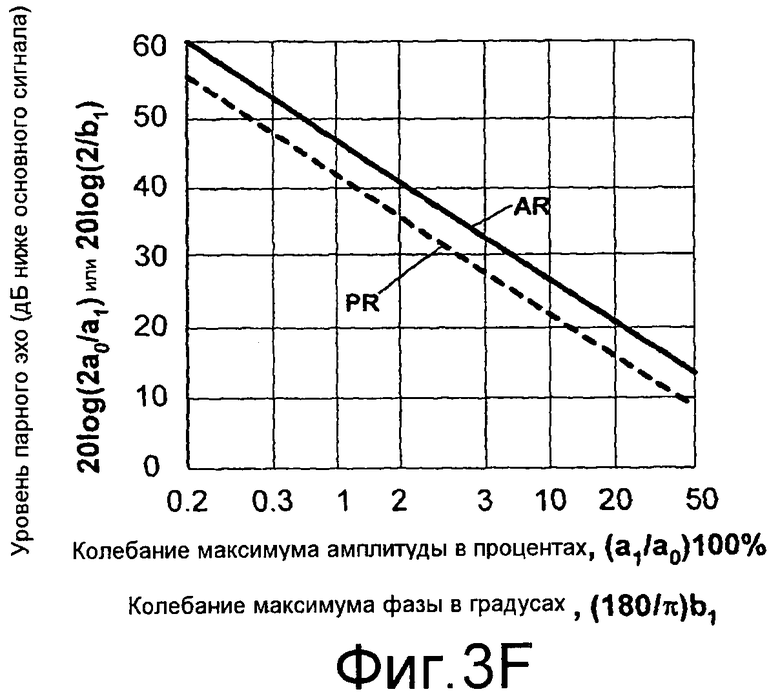
- фиг. 3F - в логарифмической шкале, колебания амплитуды (AR) и фазы (PR), выраженные в зависимости от значений ao, a1, b1. Параметр b0 является средней задержкой времени прохождения полного сигнала, то есть крутизной подстроенной линейной опоры, проходящей через ноль, эквивалентной этой задержке прохождения. Только отклонения от упомянутой линейной опоры вносят вклад в искажение.
На фиг. 3E главный максимум MP соответствует исходному, неискаженному сигналу. Первый боковой максимум РА является копией, связанной с искажением амплитуды с соответствующим временным сдвигом (+Ca) относительно MP, в то время как второй боковой максимум RP вызван искажением фазы с соответствующим временным сдвигом (+CPh). Ссылки HGH1 и HGH2 указывают особенности искаженного сигнала, связанного с компонентами второго порядка искажений амплитуды и фазы, связанными с членами уравнения (1), которые были отброшены, при получении уравнения (2), где имеются ввиду упомянутый HGH1 с соответствующим временным сдвигом (-Ca+Cph), и HGH2 с соответствующим временным сдвигом (+Ca+Cph) соответственно. Ссылка BES связана с компонентом функции Бесселя второго порядка J2 из-за относительно высоко выбранного компонента b1 модуляции фазы с результирующим соответствующим временным сдвигом (+2CPh).
Так как произвольная передаточная функция может быть разложена, согласно теории Фурье, в сумму синусоидальных передаточных функций, механизм искажения, обсуждаемый выше, может быть расширен для передаточной функции искажения более общего вида, когда теория остается применимой для каждого отдельного компонента:
Одной из фундаментальных функций в навигационных приложениях является вычисление функции корреляции сигналов множественного доступа с кодовым разделением (CDMA) для процесса определения местоположения. Второй выходной функцией является вычисление S-кривой (состоящей из разности во времени между двумя функциями корреляции), для того чтобы увеличить точность обнаружения местоположения. Относительно этой последней функции, асимметрии в функции корреляции, вызванные описанным выше механизмом, формируют сдвиги ошибок определения местоположения (сдвиг S-кривой); поэтому ограничение количества искажений выходного рабочего сигнала является принципиально важным, чтобы минимизировать сдвиги в определении местоположения.
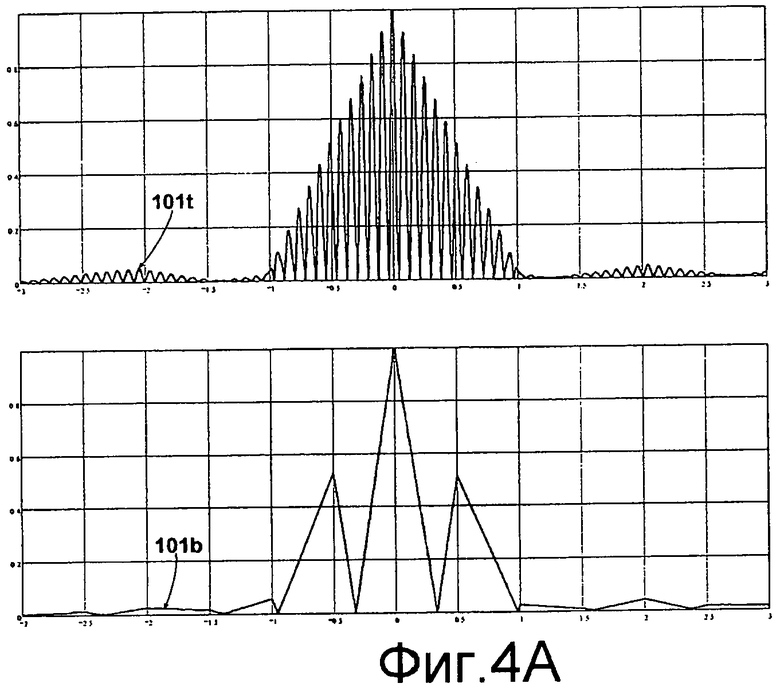
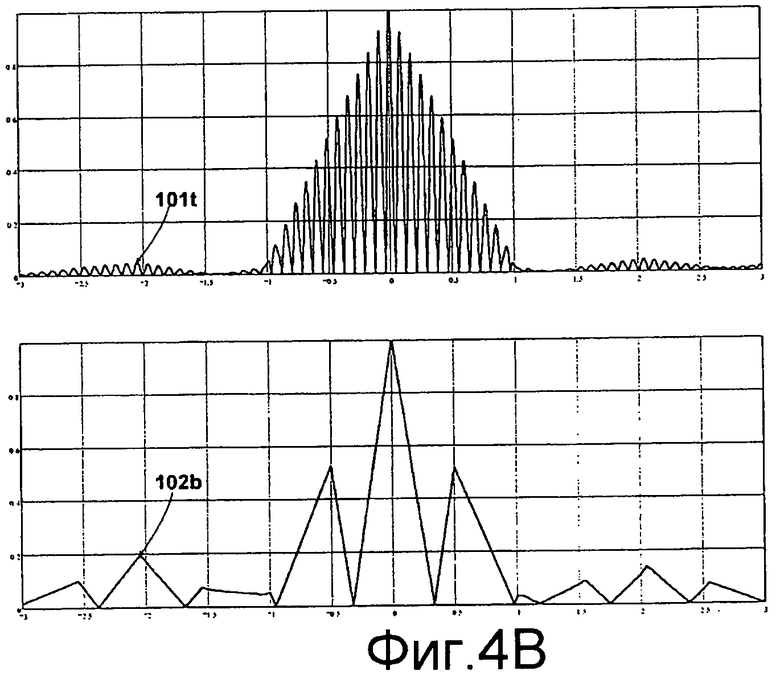
Фиг. 4A-4E показывают негативное воздействие искажения на симметрию функции корреляции типичного выходного сигнала излучающей навигационной полезной нагрузки, согласно дополнительному примеру. Пример основывается на составном сигнале, объединяющем подкомпоненты типа BOC(Xn, yn), где BOC - бинарное кодирование сдвига, x - частота сдвига поднесущей в МГц, y - скорость кодирования в МЧип. Пример сконфигурирован как {x1=15×1,023 МГц, y1=2,5×1,023 Мгц, косинусная поднесущая}, кратко BOC(15,2,5)-c; и {x2=1×1,023 МГц, y1=1×1,023 МГц, синусная поднесущая}, кратко ВОС (1,1)-s. фиг. иллюстрируют следующее:
- фиг. 4А показывает ВОС(15,2.5)-с (верхняя) и ВОС(1,1)-s (нижняя) неискаженную функцию корреляции;
- фиг. 4B показывает ВОС(15,2.5)-с (верхняя) и ВОС(1,1)-s (нижняя) искаженную функцию корреляции с ao/a1=0, Ca=н/д, b1=20 град, Cph=2000 нс;
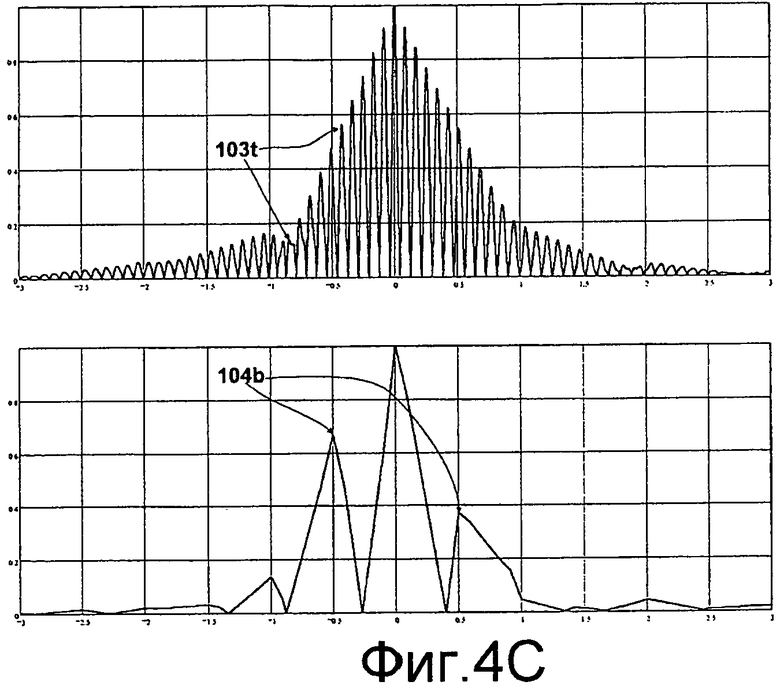
- фиг. 4С показывает ВОС(15,2.5)-с (верхняя) и ВОС(1,1)-s (нижняя) неискаженную функцию корреляции с ao/a1=0, Ca=н/д, b1=20 град, Cph=800 нс;
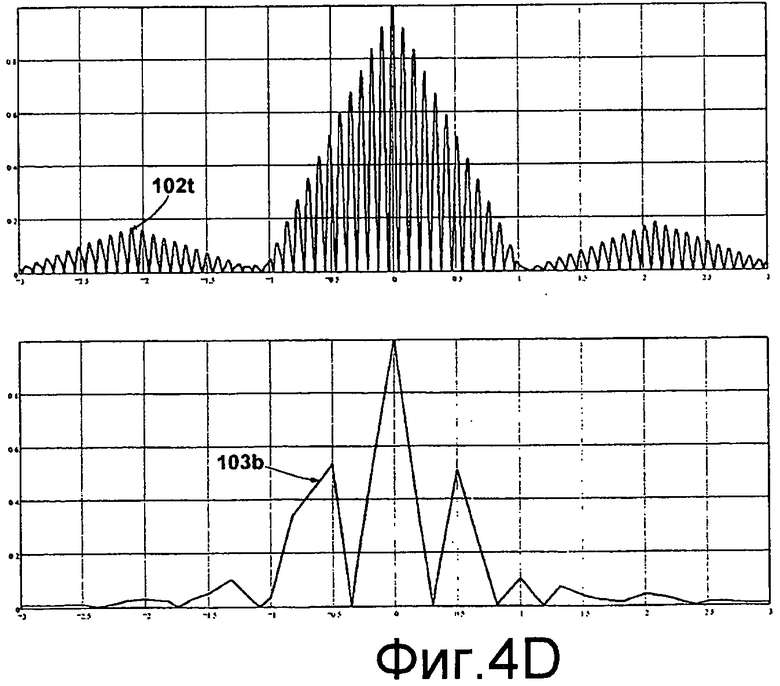
- фиг. 4D показывает ВОС(15,2.5)-с (верхняя) и ВОС(1,1)-s (нижняя) неискаженную функцию корреляции с ao/a1=0, Ca=н/д, b1=20 град, Cph=400 нс; и
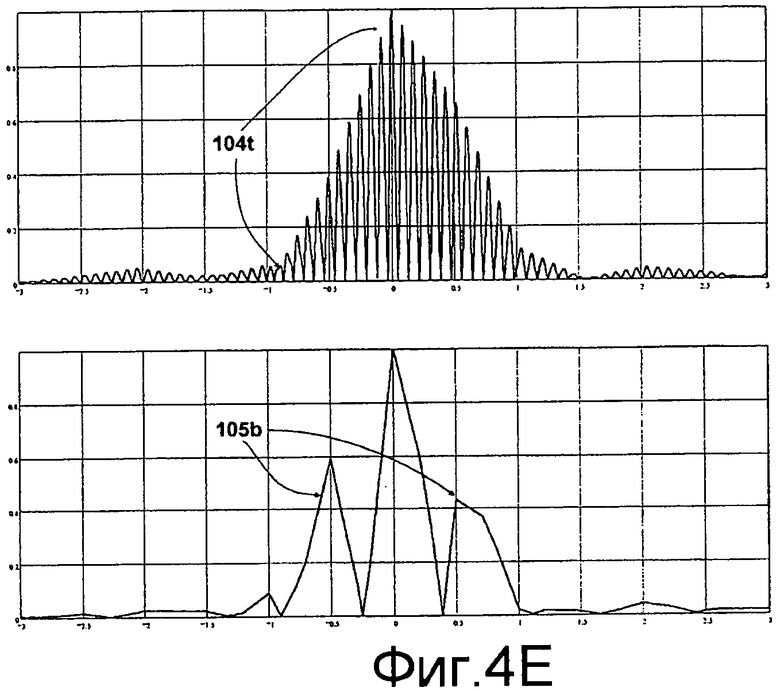
- фиг. 4E показывает ВОС(15,2.5)-с (верхняя) и ВОС(1,1)-s (нижняя) неискаженную функцию корреляции с ao/a1=0, Ca=н/д, b1=20 град, Cph=200 нс;
В этом случае было применено только искажение фазы, и b1 был взят относительно высоким, чтобы усилить эффект для иллюстрации. Можно заметить, что неискаженные функции корреляции на фиг. 4A симметричны, в то время как на фиг. 4B-4E искажение фазы вводит асимметрию.
В графиках на фиг. 4A и 4B горизонтальная ось представляет нормализованное отношение времени к скорости передачи элементарных посылок. Единица шкалы равняется 391 нс на верхнем графике и 997.5 нс на нижнем. Вертикальная ось приведена в линейном масштабе.
Ссылка 101t на фиг. 4A - верхний график представляет боковой лепесток, связанный с произведением кодовой взаимной корреляции для ВОС(15,2.5)-c. Так как здесь отсутствует какое-либо искажение, графики корреляции являются симметричными в окне [-1,+1] по оси X. Та же самая особенность для сигнала ВОС(1,1)-s указана ссылкой 101b.
Для сигнала ВОС(1,1)-s на нижнем графике фиг. 4B, ссылка 102b представляет максимум корреляции из-за вызванной искажением копии первого порядка. Так как круговая частота CPh колебания фазы уменьшается, копия начинает вносить помехи (интерферировать с) в исходную функцию корреляции в окне [-1,+1] по оси X, и вводит сильную асимметрию в огибающую графика корреляции (ссылка 103b на нижнем графике фиг. 4C). Асимметричные свойства еще более сильны на фиг. 4D (ссылка 104b) и 4E (ссылка 105b).
Искажение имеет тот же самый эффект для сигнала ВОС(15,2.5)-c. Копия появляется на фиг. 4C (ссылка 102t) и начинает вносить помехи в исходный сигнал, вводя асимметрию в огибающую графика корреляции на фиг. 4D (ссылка 103t) и 4E (ссылка 104t).
Нужно отметить, что искажение фазы вообще является главной причиной асимметрии, поскольку копии, преобразованные во временную область, являются фазоасимметричными в этой области. Искажения амплитуды также будут способствовать проявлению асимметрии, при наличии нелинейностей, формируя перекрестную связь между амплитудной и фазовой областями (то есть амплитудные изменения будут формировать фазовые изменения).
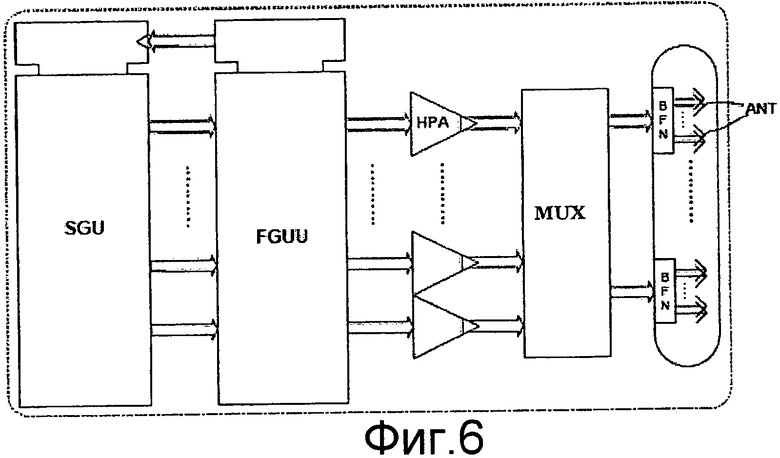
Искажение, введенное излучающей полезной нагрузкой, включает в себя линейный и нелинейный компоненты, последний из которых наиболее существенен из-за радиочастотных усилителей HPA высокой мощности (см. фиг. 6). Согласно изобретению воздействие упомянутых нелинейных эффектов включается в состав "совокупного" искажения и рассматривается как неотличимое от воздействия линейных эффектов. Другими словами, совокупная передаточная функция искажения (в данном случае, реализованная совокупным искажением SIS) может интерпретироваться как процесс передачи энергии сигнала, в котором осуществляется преобразование входного сигнала в выходной через одни и те же элементы разрешения по частоте, без различия компонента линейного, нелинейного или даже внешнего происхождения. Главная причина этого состоит в том, что довольно трудно смоделировать нелинейные и другие некогерентные процессы, особенно на уровне проектирования, но также и на уровне проверки. Однако было найдено, что, поскольку передаточная функция H искажения может рассматриваться как временно постоянная по времени и без памяти и входной сигнал X является постоянным по времени, это упрощение не влияет на совокупную рабочую характеристику выходного сигнала в пределах периода постоянства по времени.
Вследствие данного подхода линейные и нелинейные процессы искажения могут приблизительно моделироваться линейной и постоянной по времени передаточной функцией совокупного эквивалентного искажения, и их воздействие может компенсироваться посредством введения соответствующей передаточной функции компенсации с целью уменьшения совокупного искажения.
Постоянство по времени для H может быть оптимизировано во время процесса проектирования посредством уменьшения зависимости от среды для параметров, как это представлено на фиг. 1. Когда долгосрочное постоянство по времени H не может быть достигнуто, но зависящие от времени свойства могут быть охарактеризованы и отслеживаться в течение долгого времени, это может компенсироваться как часть полного алгоритма компенсации посредством введения регулярных циклов обновления в пределах периода зависимости от времени. Постоянство по времени для X может предполагаться для обычно используемых сигналов CDMA, то есть для навигационных генерирующих полезных нагрузок, при определении по кодовому периоду, заданной фиксированной кодовой скорости передачи элементарных посылок (чипов) и (если применимо) скорости поднесущей. Эффектами памяти H можно управлять с помощью подходящих мер проектирования РЧ усилителя высокой мощности, то есть с помощью подходящей развязки цепей сдвигов DC относительно РЧ.
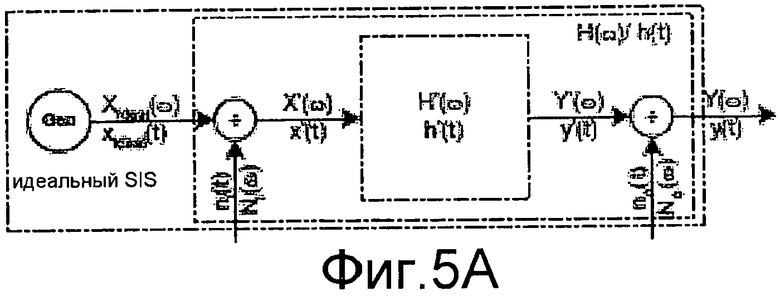
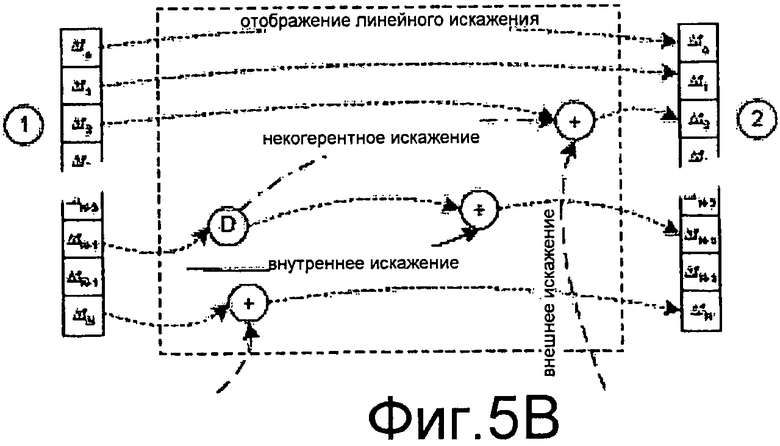
Основная идея заключается в том, что искажение, связанное с нелинейными процессами, или имеющее внешнее происхождение, формирует некогерентное выходное искажение по отношению к соответствующему входному элементу разрешения (бину) частоты. Иначе говоря, нелинейный процесс, как правило, преобразует входную энергию из одного конкретного бина частоты Δfx в другой (что также известно, как спектральное перераспределение). Внутриполосный паразитный отклик (IBUS) может обрабатываться аналогичным способом, оценивая его воздействие (например, рассматривая его, как внешний компонент No(ω)).
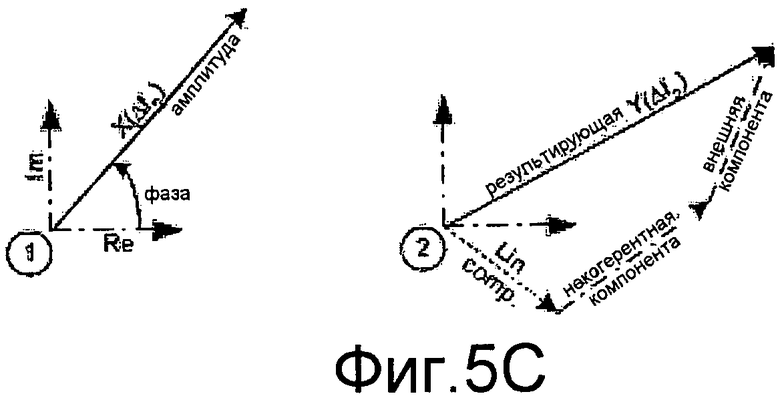
Фиг. 5A показывает блок-схему модели генерирующей излучающей полезной нагрузки. Генератор Gen сигнала формирует идеальную характеристику SIS xideal(t)/Xideal(ω), к которой добавляется компонент внешнего искажения ni(t)/Ni(ω), когда это применимо. Компонент внешнего искажения ni(t)/Ni(ω) может включать в себя шум, но также и детерминированные вклады (например, CW помехи), которые, в отличие от Гауссовского шума, не могут быть просто интегрированы с помощью стандартного объединения и поэтому должны приниматься во внимание при определении передаточной функции компенсации. Сигнал x'(t)/X'(ω), уже затронутый упомянутым внешним искажением, затем подвергается внутреннему (линейному и нелинейному) процессу искажения, смоделированному посредством передаточной функции h'(t)/H'(ω). Добавление дополняющего компонента внешнего искажения ni(t)/Ni(ω), когда это применимо, приводит к результирующей, искаженной SIS y(t)/Y(ω). Полная передаточная функция H(ω) искажения определяется как Y(ω)/Xideal(ω), причем h(t) является соответствующей импульсной характеристикой (для простоты, начиная отсюда и далее, Xideal будет обозначаться просто как X). Фиг. 5B представляет внутреннее, но неизвестное в общем случае, отображение между бинами частоты идеальной и искаженной SIS. Узел '+' представляет суммирование внутренних сигналов, узел 'D' представляет взвешенное деление или разбиение внутренних сигналов, с суммарной схемой согласно неизвестной структурной модели. Фиг. 5C показывает примерную векторную диаграмму для бина частоты Δf2.
Нужно отметить, что передаточная функция искажения H зависит от точки, в которой берется номинальный операционный выходной сигнал.
Фиг. 6 представляет обычную генерирующую излучающую полезную нагрузку, типичную для космических приложений, содержащую блок генерации сигнала (SGU), блок повышающего преобразования и генерации частоты (FGUU), модуль РЧ усиления высокой мощности (HPA), выходной мультиплексор MUX и множество излучающих антенн ANT с относящимися к ним схемами формирования диаграммы направленности BFN, если это применимо. В данном случае передаточная характеристическая функция совокупного искажения, которое должно быть скомпенсировано, включает в себя все вклады от SGU до ANT или альтернативно до, но не включая, ANT для менее сложных конфигураций вариантов осуществления полезной нагрузки. Это подразумевает возможность бортового измерения номинального рабочего выходного сигнала.
Также возможно измерять выходной сигнал на земле. В этом случае искажение, вызванное каналом передачи, должно быть откалибровано, чтобы обеспечить возможность компенсации части искажения H, связанной только с полезной нагрузкой. Типичные параметры канала передачи, которые должны приниматься во внимание, являются ионосферной задержкой распространения (переведенной в эквивалентную фазу) и изменением усиления потерь тракта по частоте.
Дополнительным полезным параметром для оценки качества искажения сигнала является функция когерентности, определяющая количество причинно-следственных взаимосвязей между выходным сигналом (Y) системы и ее входным сигналом (X), независимо от причин упомянутых взаимосвязей. Функция когерентности равна квадрату величины взаимного спектра мощности сигналов X и Y, деленной на собственные спектры мощности для X и Y, и может изменяться от нуля до одного:
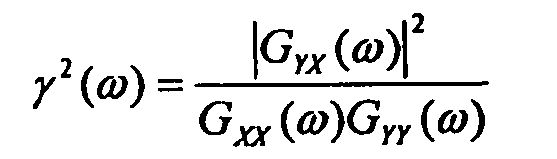 (3)
(3)
Значение 1 функции когерентности γ2(Δfx) указывает на идеальную корреляцию энергии сигнала между бинами Δfx in и Δfx out частоты, то есть идеальную причинно-следственную взаимосвязь между X и Y в бине Δfx частоты; отклонения от 1 происходят из-за некогерентных и внешних искажений, а значение 0 указывает, что в выходном бине Δfx out частоты присутствует только некоррелированый шум.
Не исчерпывающий список явлений, которые могут вызвать отклонение функции когерентности от 1, приведен ниже:
- искажение внутренним некоррелированым шумом или сигналами (например, ложными колебаниями);
- искажение внешним шумом или сигналами;
- нелинейности передачи энергии из одного бина в другой;
- дополнительные входы в системе; и
- внутренние утечки в системе.
Функция когерентности также позволяет вычислить отношение сигнал-шум для выходного сигнала Y:
 (4)
(4)
Нормализованный уровень шума задается следующим выражением:
 (5)
(5)
После обсуждения соответствующих механизмов искажения далее будет описан способ его компенсации согласно настоящему изобретению. В частности, будет рассмотрен случай генерирующей полезной нагрузки для спутниковых приложений (см.фиг. 6); однако способ согласно настоящему изобретению может быть применен к любой излучающей полезной нагрузке.
Как представлено на фиг. 11, основная идея изобретения заключается в том, чтобы оценить внутреннюю суммарную характеристику излучающей полезной нагрузки PL при помощи модуля оценки BBES, принимающего на своих входах выходной сигнал Y полезной нагрузки и «Золотой Стандарт» X, то есть опорный сигнал, соответствующий ожидаемому неискаженному выходному сигналу, не основанному на измерениях. Опорный сигнал формируется внешним блоком GS. Предпочтительно X может быть выровненным по времени относительно выходного сигнала Y, чтобы уменьшить b0, насколько это возможно. Это не является существенным, но может ускорить сходимость модуля оценки.
Предпочтительно, модуль оценки BBES является модулем оценки типа "черного ящика", т.е. не использует априорные данные об искажении, вызванном полезной нагрузкой.
Здесь, "суммарная" означает, что все искажения, обусловленные всей цепью оборудования полезной нагрузки (или соответствующей частью ее), одновременно принимаются во внимание, включая нелинейные и/или некогерентные вклады. Таким образом, все отдельные рабочие характеристики оборудования полезной нагрузки, в пределах периметра, показанного на фиг. 6 пунктирной линией, вносят свой вклад, коррелированным способом, в совокупную рабочую характеристику выходного сигнала, который появляется во время номинальной работы. Неблагоприятные эффекты взаимодействия между различным оборудованием в полезной нагрузке, такие как эффекты рассогласования РЧ, также автоматически принимаются во внимание в способе согласно изобретению. Кроме того, в случае, если это требуется, Золотой Стандарт может также обеспечить высокоточный опорный кадр с абсолютной меткой времени, в частности, при осуществлении запуска посредством высокоточного атомного тактового генератора. Это полезно для долгосрочной характеристики смещения в H, которая считается временно постоянной по времени, согласно изобретению, и для оценки "постоянного по времени" периода исходя из долгосрочной характеристики полученных данных.
Согласно предпочтительному варианту осуществления изобретения передаточная функция частотной характеристики (FRTF) совокупного искажения вычисляется с помощью стандартного модуля оценки взаимного спектра посредством вычисления отношения выходного сигнала к входному сигналу, как показано в следующем уравнении:
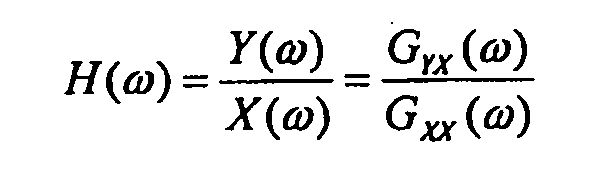 (6)
(6)
где X(ω) является опорным сигналом, или "Золотым Стандартом", в частотной области, Y (ω) является измеренным выходным сигналом, также в частотной области, а Gxy(ω) и Gxx(ω) являются усредненными взаимными и собственными спектрами мощности соответственно, причем последнее используется в качестве коэффициента нормализации (здесь, с непрерывным представлением по времени).
Во временной области Gxy(ω) и Gxx(ω) могут быть вычислены как:
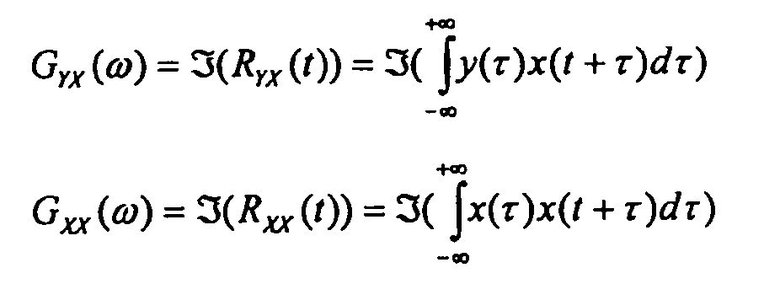 (7)
(7)
ℑ является оператором преобразования Фурье.
В частотной области Gxy(ω) и Gxx(ω) могут быть вычислены как (здесь, с дискретным представлением по частоте):
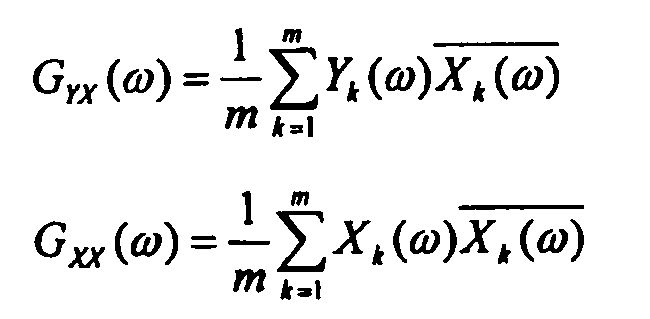 (8)
(8)
где m является длиной используемых дискретных наборов данных.
Результирующие характеристики амплитуды и фазы легко получаются как:
 (9)
(9)
Как обсуждалось выше, А(ω) и ф(ω) также принимают во внимание некогерентные и нелинейные вклады в совокупное искажение (см. фиг. 5A и 5B).
Согласно настоящему изобретению излучающую полезную нагрузку рассматривают как черный ящик, причем номинальный рабочий выходной сигнал используется для оценки остаточного искажения выходного сигнала. В рассматриваемом примере, относящемся к генерирующей полезной нагрузке по фиг. 6, возможность компенсации реализована в блоке генерации сигнала, который может генерировать идеальный (Золотой Стандарт) опорный сигнал плюс передаточную функцию Hc компенсации схемы, в качестве его номинального выходного сигнала. Как обсуждалось выше, этот "номинальный" выходной сигнал не соответствует никакому "реальному" сигналу в пределах полезной нагрузки, потому что сам SGU вносит вклад в совокупное искажение полезной нагрузки, и этот вклад также принимается во внимание в способе компенсации, согласно настоящему изобретению.
Как будет очевидно для специалиста в данной области техники, передаточная функция Hc компенсации может быть осуществлена несколькими различными способами. Выбор конкретного варианта осуществления зависит, среди прочего, от необходимого уровня остаточного совокупного искажения и от типа совокупного искажения, которое должно быть скомпенсировано. В большинстве случаев стандартный цифровой фильтр с конечной импульсной характеристикой (FIR), вводящий только линейную компенсацию, будет достаточным для достижения целей остаточного совокупного искажения. Полное асимметричное управление как амплитудной, так и фазовой областями, как правило, достигается с помощью математических комплексных (I&Q) топологий. Достойной внимания особенностью изобретения является то, что компенсация нелинейного и/или некогерентного искажения, помимо линейного, может быть включена одновременно, в том числе по частоте, посредством ввода простой линейной передаточной функции компенсации, рассматривая их как элементы совокупного источника вкладов в передаточной функции общего эквивалентного выходного сигнала.
Для реализации упомянутой линейной передаточной функции компенсации особенно предпочтительными являются фильтры FIR, но также могут использоваться фильтры с бесконечной импульсной характеристикой (IIR).
Нужно понимать, что передаточная функция компенсации может также быть осуществлена в различных местоположениях в пределах излучающей полезной нагрузки и не обязательно внутри SGU. Последнее, однако, является естественным выбором для генерирующих полезных нагрузок, подразумевающих управление с низкой энергией, в отличие от схем компенсации с прямой связью, которые, как правило, требуют дополнительных элементов высокой мощности.
Так как информация о внутренней структуре полезной нагрузки не используется (подход черного ящика), в большинстве случаев будет требоваться итеративный подход, чтобы достигнуть удовлетворительной компенсации искажения сигнала по частоте. Это главным образом обусловлено некогерентными и нелинейными механизмами искажения, которые могут формировать немонотонные траектории сходимости, при использовании ошибочной функции стоимости в качестве критерия сходимости. Однако монотонная сходимость чаще всего достигается, когда не присутствуют эффекты памяти в H. В частности, когда является большим нелинейное искажение, может быть предпочтительным включать в полезную нагрузку нелинейный блок предварительного искажения, что известно из уровня техники (например, стадия расширения усиления для корректировки сжатия усиления, обусловленного HPA). Сокращение вклада нелинейного искажения не является обязательным согласно изобретению, но может ускорить сходимость итеративной процедуры определения Hc.
Фиг. 7 представляет высокоуровневый алгоритм способа согласно изобретению.
Первый этап S1 способа заключается в измерении номинального выходного рабочего сигнала излучающей полезной нагрузки, [Y(ω)]n/[y(t)]n (индекс "n" относится к n-ой итерации алгоритма; при первой итерации, n=1). Этот выходной сигнал соответствует "номинальному" выходному сигналу SGU, содержащему совокупное искажение полезной нагрузки. В свою очередь, "номинальный" выходной сигнал SGU является равным идеальному выходному сигналу, к которому применена начальная предполагаемая передаточная функция компенсации [Hc(ω)]1. В начале алгоритма упомянутая начальная предполагаемая передаточная функция компенсации может быть задана тождественно равной 
Затем (S2) характеристики совокупного искажения амплитуды и фазы, [А(ω)]n и [φ(ω)]n, вычисляются посредством выполнения оценки черного ящика, предпочтительно согласно способу взаимного спектра по уравнениям 6-9. "Золотой Стандарт" или опорный сигнал Xideal(ω)/xideal(t), известный априорно, используется вместе с измеренным выходным сигналом [Y(ω)]n/[y(t)]n для выполнения оценки. Характеристика остаточного совокупного искажения операционного выходного сигнала на n-ой итерации алгоритма обозначается как [Hd(ω)]n в частотной области и [hd(t)]n во временной области.
После дополнительного этапа S3 калибровки, чтобы принять во внимание запас неопределенности, влияющий на определение остаточной совокупной характеристики, [Hd(ω)]n используется для вычисления обновленной предполагаемой передаточной функции компенсации [Hc(ω)]n+1 (S4); например, [Hc(ω)]2 получается в конце первой итерации. Эта обновленная предполагаемая передаточная функция компенсации загружается в SGU полезной нагрузки и используется, чтобы сформировать следующий выходной сигнал [Y(ω)]n+1/[y(t)]n+1 (S5).
Этапы способа, описанные выше, повторяются итеративно, пока не будет удовлетворено целевое условие, указывающее, что была достигнута удовлетворительная компенсация искажения сигнала. Типичное целевое условие состоит в том, чтобы получить функции частотной характеристики амплитуды и фазы, приблизительно плоские в пределах рабочей ширины полосы (выравнивание). Альтернатива критерию сходимости «прошел-не прошел» может состоять в определении окна огибающей граничной ошибки по рабочей полосе частот (или за ее пределами, чтобы удовлетворить требованиям для внеполосных излучений) как для амплитудной, так и для фазовой областей, таким образом, чтобы оставаться в пределах параметров остаточного искажения. Это проиллюстрировано на фиг. 9, где кривые A1 и A2 соответственно представляют неудовлетворяющую и удовлетворяющую характеристику [А(ω)]n параметра искажения (компонента амплитуды) или [φ(ω)]n (компонента фазы).
В процессе работы смещение параметра в полезной нагрузке будет уменьшать эффективность компенсации, и искажение сигнала снова вырастет до недопустимого уровня. Новый цикл итерации исправит это ухудшение в рабочей характеристике полезной нагрузки, без необходимости характеризовать скорость смещения и/или идентифицировать его причины.
Фиг. 8 более подробно представляет данный алгоритм в форме блок-схемы, где блок GP представляет генерирующую полезную нагрузку (см. фиг. 5A) и EC алгоритм оценки/компенсации.
В блоке EC, EST представляет модуль оценки черного ящика для взаимного спектра, принимающий в качестве входных сигналов измеренный выходной сигнал полезной нагрузки, [Y(ω)]n/[y(t)]n, и специально сгенерированный опорный сигнал или "Золотой Стандарт" X(ω)/x(t). Блок EST обеспечивает на выходе оцененную остаточную совокупную характеристику, [Hd(ω)]n, разложенную на ее компоненты амплитуды [А(ω)]n и фазы [φ(ω)]n; возможно, он также производит оценку функции когерентности [γ2(ω)]n и отношения сигнал-шум [SNR(ω)]n.
Оцененная остаточная совокупная характеристика, [Hd(ω)]n делится на предопределенную передаточную функцию калибровки Hcal(ω)=Acal(ω)exp{iфcal(ω)}. На чертеже операция деления представлена как вычитание, потому что компоненты амплитуды, как правило, выражаются в логарифмических единицах. Как обсуждалось выше, передаточная функция калибровки представляет собой запас неопределенности, воздействующий на определение остаточной совокупной характеристики.
(Калиброванная) остаточная совокупная характеристика, [H'd(ω)]n служит входным сигналом для блока TEST, проверяющего целевое условие. В его самой простой форме это условие может состоять из значения ошибки функции стоимости, определенного модулем оценки наименьших квадратов fLSE:
e=fLSE(|X (ω)-Y (ω)|)≤etarget, (10)
Также могут использоваться более сложные модули оценки с лучшими свойствами сходимости и/или другими типами критериев, такими как упомянутое выше окно огибающей граничной ошибки. Критерий окна огибающей граничной ошибки особенно полезен, когда амплитудой смещающихся копий (согласно описанным выше механизмам) нужно управлять заданным способом. Другими средствами являются дополнительно используемые функции когерентности и SNR. Это также представлено на фиг. 8. Один способ состоит в определении для этих двух функций аналогичного типа целей сходимости, как это описано для стандартных остаточных параметров амплитуды и фазы. Другой способ состоит в использовании их только как независимых индикаторов сходимости рабочей характеристики. Полная оптимизация рабочей характеристики сходимости и выбор топологии оптимизации, как правило, определяются индивидуально, на основе проектного моделирования.
Следующий этап способа состоит в обновлении предполагаемой передаточной функции компенсации, примененной посредством SGU полезной нагрузки. Согласно примерной реализации, представленной на фиг. 8, этот этап выполняется посредством деления текущей передаточной функции компенсации [Hc(ω)]n на текущее остаточное искажение (после калибровки) [H'd(ω)]n. Как для этапа калибровки, использование логарифмических единиц для амплитудных компонентов передаточной функции позволяет представить деление посредством операции вычитания. На блок-схеме z-1 представляет квантованный оператор временной задержки, как обычно в уровне техники. Местоположение полного алгоритма EC и средство хранения специально сгенерированного опорного сигнала GS могут быть реализованы где угодно на борту (в том числе в излучающей полезной нагрузке) и/или на земле. Средство хранения GS, как правило, реализуется с помощью справочных таблиц, которые альтернативно могут динамически обновляться, если это потребуется.
Если возможность компенсации SGU реализована посредством цифрового FIR фильтра, дальнейший этап способа включает в себя определение коэффициентов [hc(t)]n FIR во временной области и загрузку их в полезную нагрузку GP. Это приводит к новому выходному сигналу [Y(ω)]n+1 с уменьшенным содержанием остаточного искажения. Полный цикл повторяется, пока не будет достигнута сходимость, то есть пока не будет удовлетворено целевое условие.
Возможны несколько вариантов для замыкания полного контура. Первая конфигурация состоит в замыкании контура вне спутника и измерении остаточного искажения на наземной станции или средстве тестирования во время фазы AIV. В этом случае оценка и компенсация будут включать в себя искажение, обусловленное каналом передачи и наземной станцией или измерительным оборудованием как для амплитуды, так и для фазы, по всей рабочей полосе частот, что является не тривиальной задачей. Вторая возможность состоит в замыкании контура измерения на борту спутника. Оценки могут быть или переданы по нисходящей линии связи в случае, если алгоритм осуществляется на земле, или непосредственно выполняться на борту в случае, если алгоритм осуществляется на борту. Также возможно смешенное решение. Нужно отметить, что все факторы ошибки вне контура управления должны быть калиброваны согласно общей инженерно-технической практике.
Нужно отметить, что при определении передаточной функции компенсации на точность вычисления, как правило, влияют: число битов, устанавливающее сетку квантизации сигнала; если используется фильтр FIR, его цифровая длина; длина выборки наборов входных данных; полный период процесса осуществления выборки и ограничения рабочей точки полезной нагрузки, устанавливающие динамический диапазон компенсации. Определение и оптимизация этих различных параметров является частью общего процесса проектирования.
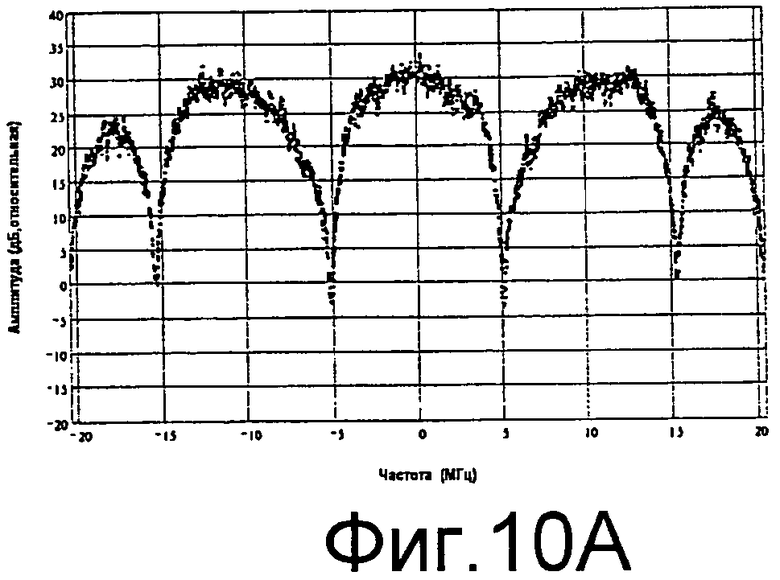
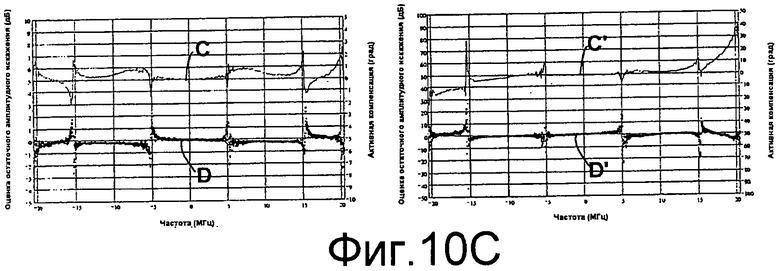
Поскольку изобретение также основано на использовании номинальных рабочих сигналов, отметим неоднородности, как правило, наблюдаемые вблизи нулей сигнала в характеристической функции остаточного искажения. Это, как правило, вызвано перераспределением спектральной энергии из-за любого нелинейного процесса в цепи полезной нагрузки, главным образом, в РЧ усилителе высокой мощности, который заполняет нулевые промежутки сигнала в первоначальном неискаженном сигнале (некогерентное расширение энергии). Такие неоднородности вызываются изменяющейся фазой (боковых)-лепестков первоначального сигнала, которые интерферируют с расширенной энергией. Это иллюстрируется на фиг. 10A-10E, показывающих практический пример остаточной функции искажения с неоднородностями вблизи нулей сигнала для фазовой и амплитудной областей. Этот пример также используется, чтобы продемонстрировать итеративную последовательность компенсации, использующую способ согласно изобретению со следующими параметрами настройки: объединение подкомпонентов сигнала=ВОС(10,5)-c и ВОС(0,5) (последнее эквивалентно BPSK(5)) согласно определениям, описанным для фиг. 4; нелинейный элемент рабочей точки 1 дБ падения выходного сигнала; и произвольно выбранная ширина полосы фильтра перед нелинейным элементом 40 МГц, чтобы сформировать изменение огибающей входного сигнала для нелинейного элемента. Активная компенсация (Ac(ω), фc(ω)) означает, что текущая компенсация применяется для фактически наблюдаемого остаточного искажения (Ad(ω), фd(ω)).
Чертежи показывают следующее:
Фиг. 10A: спектр неискаженного выходного сигнала, показывающий нули сигнала;
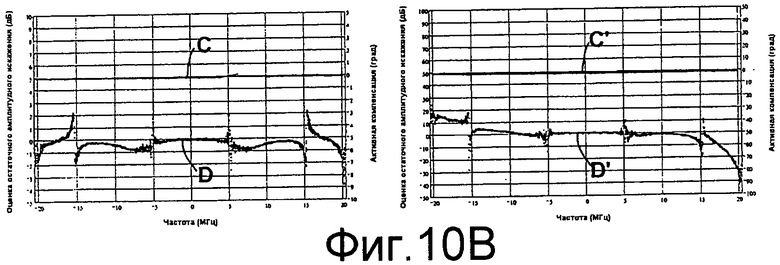
Фиг. 10B: остаточное искажение и текущая активная передаточная функция компенсации (левый график: амплитуда; правый график: фаза) некомпенсированной полезной нагрузки, причем активная компенсация равна 0 дБ (амплитуда) и 0° (фаза), то есть Hc(ω)=1;
Фиг. 10C: остаточное искажение и текущая активная передаточная функция компенсации (левый график: амплитуда; правый график: фаза) после первой итерации, причем активная компенсация равна инверсии от некомпенсированного остаточного искажения;
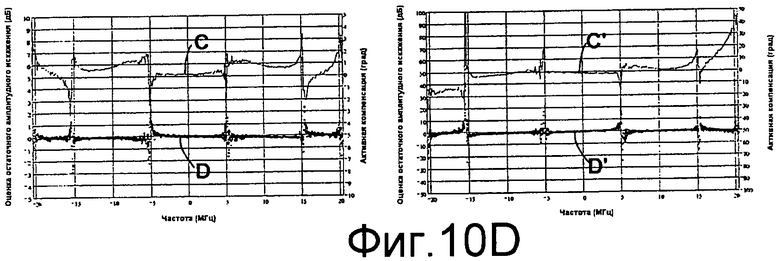
Фиг. 10D: остаточное искажение и текущая активная передаточная функция компенсации (левый график: амплитуда; правый график: фаза) после второй итерации, причем активная компенсация равна предыдущей компенсации с обновленным дополнительным значением; и
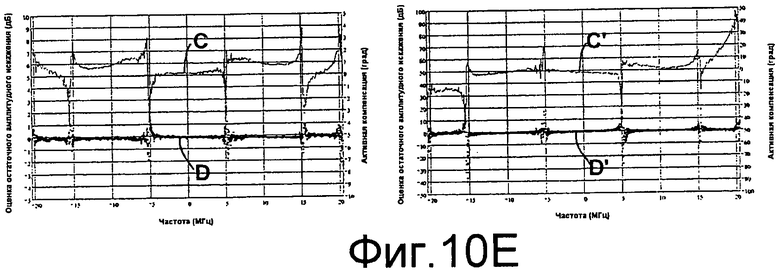
Фиг. 10E: остаточное искажение и текущая активная передаточная функция компенсации (левый график: амплитуда; правый график: фаза) после третьей итерации.
На каждой из фиг. 10B-10E, кривые D, D' представляют остаточное искажение (амплитуда и фаза соответственно), и кривые C, C' компоненты амплитуды и фазы предполагаемой передаточной функции компенсации текущей активной функции компенсации. Кривые смещены для ясности: масштаб оси Y для кривых D, D' находится слева от каждого графика, а для кривых C, C' находится на правой оси.
Этот пример также дает общее представление о типичном числе итераций, требуемых, чтобы достигнуть сходимости. Можно заметить, что основные улучшения для характеристики компенсированной полезной нагрузки приходят из первых двух итераций; дальнейшие итерации, главным образом, улучшают плоскостность характеристики вблизи нулей сигнала (едва видимо на фиг. 10E).
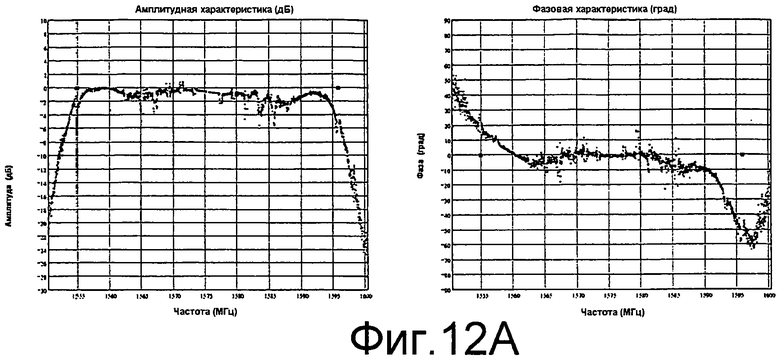
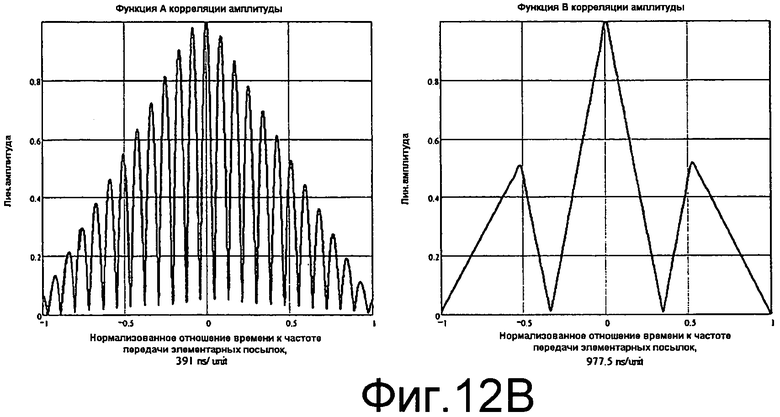
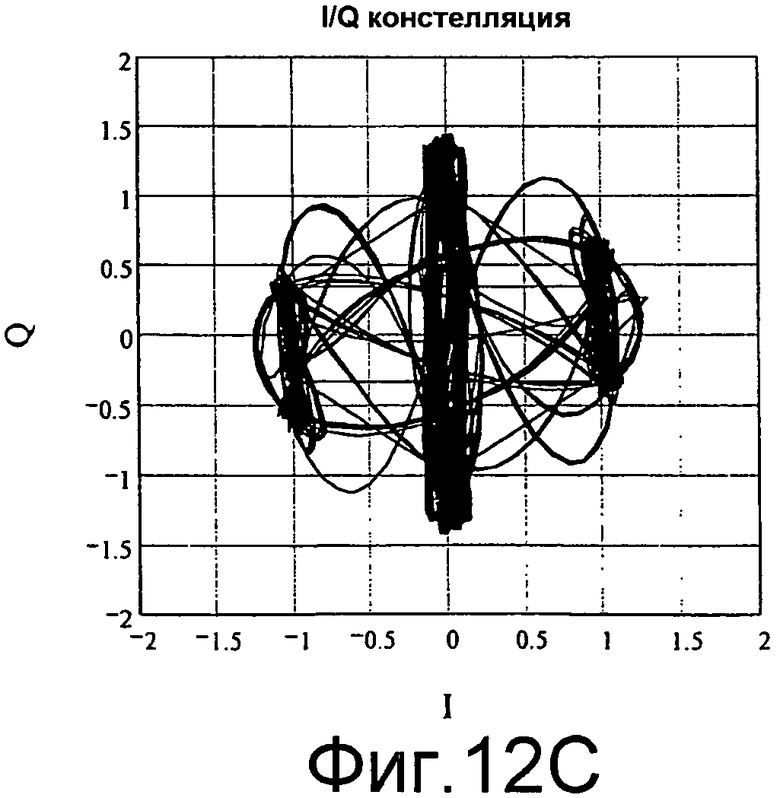
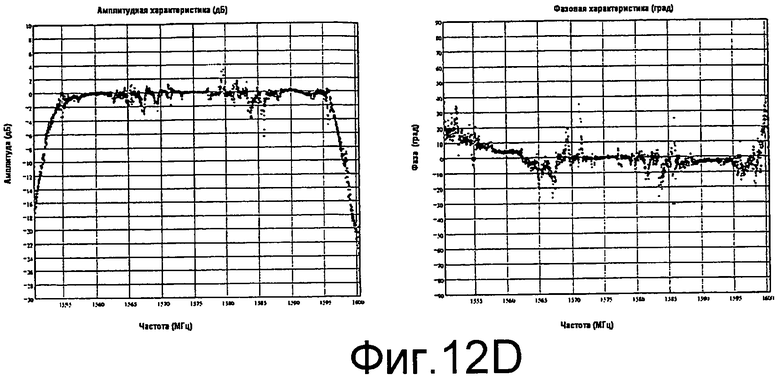
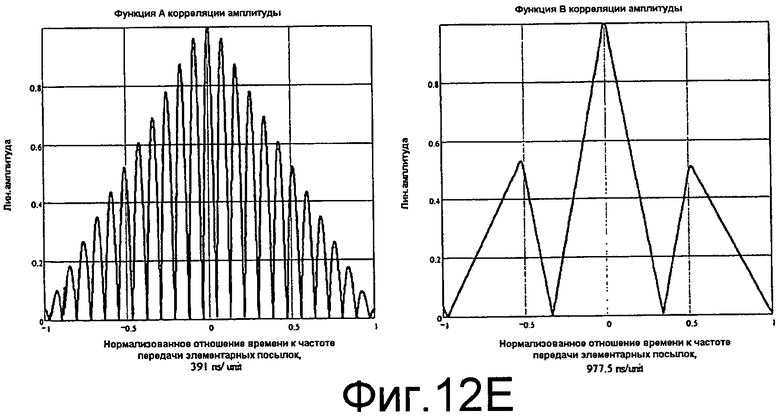
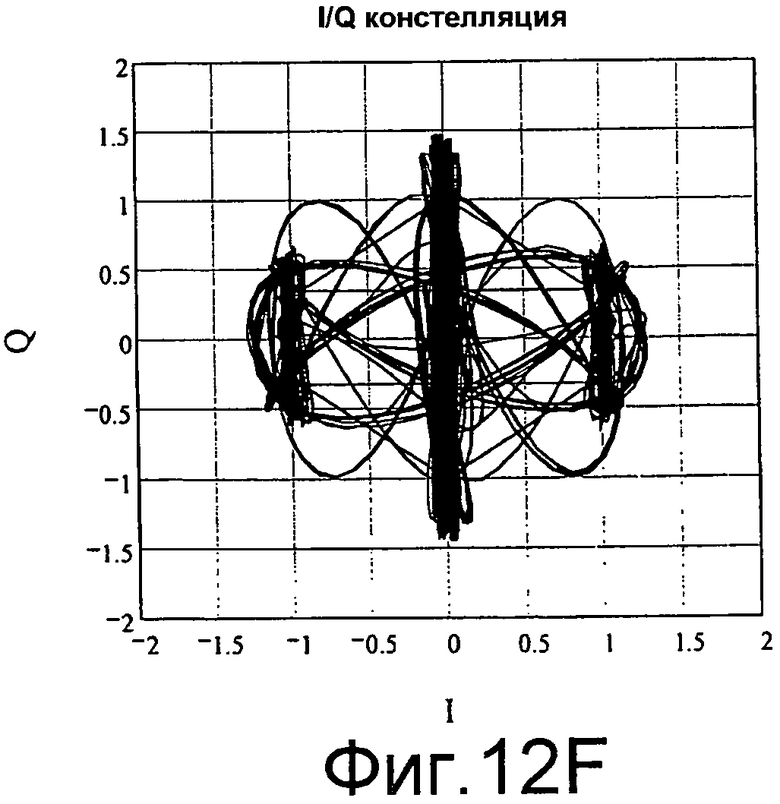
Фиг. 12A-12F демонстрируют практический результат, достигнутый для полезной нагрузки опытного образца, с использованием способа согласно настоящему изобретению. Фиг. 12A, 12B и 12C соответственно представляют характеристики амплитуды Ad(ω) и фазы фd(ω) некомпенсированной полезной нагрузки; воздействие на функцию корреляции, использующее тот же самый тип сигналов, как описано для фиг. 4; и констелляцию модуляции. Фиг. 12C, 12D и 12E представляют то же самое после выполнения единственной итерации способа. Существенное выравнивание амплитудной и фазовой частотной характеристики могут наблюдаться для одной единственной итерации, так же как улучшение симметричности функции корреляции и констелляции сигнала. Остаточное искажение вблизи нулей сигнала, как правило, уменьшается в дополнительных итерациях. В этом случае номинальный операционный выходной сигнал полезной нагрузки был измерен в лаборатории или установке наземной станции, Hc был вычислен и загружен в полезную нагрузку (то есть в SGU), чтобы замкнуть контур компенсации.
Возможны различные конфигурации контура. Как разомкнутые (то есть Hc вычисляется в не итерационном режиме), так и замкнутые (то есть Hc вычисляется в последовательном итерационном режиме, на основании предшествующих входных сигналов) конфигурации контура возможны, хотя схема замкнутого контура является базовым решением, чтобы достигнуть оптимальных рабочих характеристик компенсации. Конфигурация замкнутого контура также идеальна для обработки параметра, смещающегося по времени (постоянство H по времени в некоторый промежуток времени). Это в особенности интересно для поддержания операций во время продолжительности работы полезной нагрузки. Полагается, что учет типичных констант времени для изменений параметров внешней среды, как представлено на фиг. 1, и ухудшения в течение срока службы, высокоскоростные и в реальном времени рабочие характеристики являются не обязательными. Это позволяет осуществлять алгоритм компенсации как дополнительную второстепенную процедуру с низким рабочим циклом обработки. Это в свою очередь формирует минимальные затраты для других номинальных работающих приложений спутника, которые критичны по времени и требуют большой обработки и ресурсов ширины полосы линии связи на борту, то есть задач управления положением в пространстве и операций по обслуживанию. Также возможны как неавтономные (требуется регулярное операционное вмешательство), так и автономные конфигурации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛИНЕАРИЗАЦИИ АМПЛИТУДНЫХ ХАРАКТЕРИСТИК УСИЛИТЕЛЬНОГО ТРАКТА РАДИОСИГНАЛА | 2009 |
|
RU2425439C1 |
| СПОСОБ УСИЛЕНИЯ АМПЛИТУДНО-МОДУЛИРОВАННЫХ И ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ - УСИЛИТЕЛЬ СИНЕЛЬНИКА | 1995 |
|
RU2127941C1 |
| ВОЗБУЖДЕНИЕ ПАРАМЕТРИЧЕСКИХ ГРОМКОГОВОРИТЕЛЕЙ | 2011 |
|
RU2569914C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЖИВЫХ ОРГАНИЗМОВ | 1995 |
|
RU2162235C2 |
| СПОСОБ ЦИФРОВОГО УПРАВЛЕНИЯ КЛЮЧЕВЫМ ГЕНЕРАТОРНЫМ УСТРОЙСТВОМ УЛЬТРАЗВУКОВОГО ДИАПАЗОНА | 2019 |
|
RU2718003C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ШУМОВОЙ ПОМЕХИ | 2011 |
|
RU2484577C2 |
| СПОСОБ ПОДАВЛЕНИЯ НЕЛИНЕЙНОГО ПОГЛОЩЕНИЯ ЗВУКА | 1991 |
|
RU2017232C1 |
| СПОСОБ АДАПТИВНОГО ПОДАВЛЕНИЯ ПОМЕХ | 2011 |
|
RU2456743C1 |
| Способ повышения линейности высокочастотных усилителей мощности и устройство для его осуществления | 2020 |
|
RU2761856C1 |
| УСТРОЙСТВО И СПОСОБ ПРЕДЫСКАЖЕНИЯ И АВТОКАЛИБРОВКИ УСИЛИТЕЛЯ | 2005 |
|
RU2336628C2 |

Изобретение относится к способу компенсации искажения сигнала в излучающей полезной нагрузке. Техническим результатом является обеспечение способа компенсации искажения сигнала в излучающей полезной нагрузке, без необходимости получения входного сигнала упомянутой полезной нагрузки. Способ компенсации искажения сигнала в излучающей полезной нагрузке (GP), содержит этапы, на которых определяют передаточную функцию компенсации (Нс(ω)), и включают ее в совокупную характеристику упомянутой полезной нагрузки, причем способ, отличается тем, что: выбирают начальную предполагаемую передаточную функцию ([Нс(ω)]n) компенсации и включают ее в совокупную характеристику упомянутой полезной нагрузки (GP); получают выходной сигнал (Y(ω),y(t)) упомянутой излучающей полезной нагрузки; на основе упомянутого полученного выходного сигнала и опорного сигнала (XIdeal(ω), xIdeal(t)), соответствующих ожидаемому неискаженному выходному сигналу, выполняют оценку передаточной функции ([Hd(ω)]n) остаточного искажения упомянутой излучающей полезной нагрузки; и на основе упомянутой оценки упомянутой передаточной функции остаточного искажения вычисляют обновленную предполагаемую передаточную функцию ([Hc(ω)]n+1) компенсации и включают ее в совокупную характеристику упомянутой полезной нагрузки. 2 н. и 20 з.п. ф-лы, 31 ил.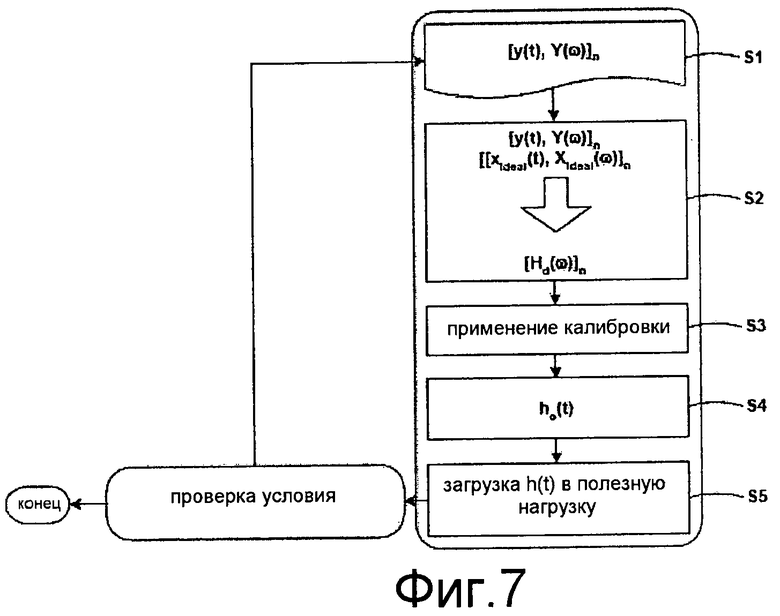
1. Способ компенсации искажения сигнала в излучающей полезной нагрузке (GP), содержащий этапы, на которых определяют передаточную функцию компенсации (Нс(ω)) и включают ее в совокупную характеристику упомянутой полезной нагрузки, причем способ отличается тем, что содержит этапы, на которых:
(a) выбирают начальную предполагаемую передаточную функцию ([Нс(ω)]n) компенсации и включают ее в совокупную характеристику упомянутой полезной нагрузки (GP);
(b) получают выходной сигнал (Y(ω),y(t)) упомянутой излучающей полезной нагрузки;
(c) на основе упомянутого полученного выходного сигнала и опорного сигнала (Xideal(ω), xideal(t)), соответствующего ожидаемому неискаженному выходному сигналу, выполняют оценку передаточной функции ([Hd(ω)]n) остаточного искажения упомянутой излучающей полезной нагрузки; и
(d) на основе упомянутой оценки упомянутой передаточной функции остаточного искажения вычисляют обновленную предполагаемую передаточную функцию ([Hc(ω)]n+1) компенсации и включают ее в совокупную характеристику упомянутой полезной нагрузки;
при этом упомянутый выходной сигнал (Y(ω),y(t)) является единственным сигналом, полученным от упомянутой излучающей полезной нагрузки, которая используется для выполнения упомянутой оценки упомянутой передаточной функции остаточного искажения.
2. Способ по п.1, в котором упомянутая совокупная характеристика полезной нагрузки и передаточная функция остаточного искажения включают в себя одновременно линейный, некогерентный и нелинейный компоненты искажения для всех частот.
3. Способ по п.1, в котором упомянутая предполагаемая передаточная функция ([Нс(ω)]n) компенсации является линейной передаточной функцией.
4. Способ по п.1, дополнительно содержащий этап, на котором применяют нелинейную передаточную функцию предыскажения к полезной нагрузке, снижающую нелинейные вклады в ее совокупное искажение.
5. Способ по п.1, в котором упомянутая совокупная характеристика полезной нагрузки является постоянной по времени, по меньшей мере, в короткий срок, и не обладающей памятью и упомянутый идеальный опорный сигнал является постоянным по времени.
6. Способ по п.1, дополнительно содержащий повторение этапов (b) и (d) итеративно, пока не будет удовлетворено целевое условие, указывающее, что достигнута удовлетворительная компенсация искажения сигнала.
7. Способ по п.6, в котором упомянутая предполагаемая передаточная функция компенсации содержит линейный компонент в форме фильтра с конечной импульсной характеристикой, и в котором упомянутый этап (d) содержит определение обновленных коэффициентов ([hc(t)]n+1) для упомянутого фильтра с конечной импульсной характеристикой.
8. Способ по п.1, в котором упомянутый опорный сигнал генерируется специально, а не измеряется внутри упомянутой излучающей полезной нагрузки.
9. Способ по п.1, в котором оценивание упомянутой передаточной функции остаточного искажения выполняется модулем оценки черного ящика, который не требует априорного знания об искажении, вводимом нагрузкой.
10. Способ по п.1, в котором упомянутый этап (с) выполнения оценки «черного ящика» упомянутой передаточной функции остаточного искажения выполняется посредством использования оценки (EST) взаимного спектра.
11. Способ по п.1, дополнительно содержащий этап, на котором делят упомянутую оцененную передаточную функцию остаточного искажения на передаточную функцию (Hcal(ω)) калибровки перед вычислением упомянутой обновленной предполагаемой передаточной функции компенсации.
12. Способ по п.11, в котором упомянутая передаточная функция калибровки характеризует запас неопределенности оценки упомянутой передаточной функции остаточного искажения.
13. Способ по п.1, в котором упомянутый этап (d) вычисления обновленной предполагаемой передаточной функции ([Hc(ω)]n+1) компенсации содержит деление предполагаемой передаточной функции компенсации, вычисленной в течение предыдущей итерации ([Нс(ω)]n), на текущую оцененную передаточную функцию ([Hd(ω)]n) остаточного искажения.
14. Способ по п.6, в котором упомянутое целевое условие является условием, установленным для текущей оцененной передаточной функции остаточного искажения.
15. Способ по п.6, дополнительно содержащий вычисление функции γ2(ω) когерентности и уровня сигнал-шум (SNR(ω)) упомянутого полученного выходного сигнала по отношению к упомянутому опорному сигналу; и в котором упомянутое целевое условие учитывает упомянутую функцию когерентности и уровень сигнал-шум.
16. Способ по п.1, в котором упомянутый выходной сигнал получают в приемной станции, вне упомянутой излучающей полезной нагрузки.
17. Способ по п.1, в котором упомянутый выходной сигнал получают внутри упомянутой излучающей полезной нагрузки.
18. Способ по п.1, в котором излучающая полезная нагрузка является генерирующей полезной нагрузкой.
19. Способ по п.1, в котором излучающая полезная нагрузка является полезной нагрузкой космического аппарата.
20. Способ по п.19, причем способ применяется для наземной верификации и конфигурации излучающей полезной нагрузки, уже встроенной в космический аппарат.
21. Способ по п.19, причем способ применяется для космической верификации и конфигурации излучающей полезной нагрузки космического аппарата посредством использования выходного сигнала номинальной операции в качестве упомянутого полученного выходного сигнала, посредством чего не требуется прерывание обслуживания.
22. Излучающая полезная нагрузка (GP), содержащая средство для предварительной компенсации искажения сигнала, отличающаяся тем, что упомянутое средство выполнено с возможностью выполнения способа по любому из пп.1-19.
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| US 6405147 В1, 11.06.2002 | |||
| Способ приготовления препарата углеродного материала для рентгеноструктурного анализа | 1984 |
|
SU1245967A1 |
| СИСТЕМА РАСПРЕДЕЛЕННЫХ УСИЛИТЕЛЕЙ | 1989 |
|
RU2103805C1 |

