Область техники, к которой относится изобретение
Настоящее изобретение относится к лифтовым системам и способам диспетчеризации кабины лифта. Более конкретно, изобретение относится к системам и способам, препятствующим раскачиванию лифта в шахте.
Уровень техники
Во многих лифтовых системах имеются кабина лифта и противовес, поддерживаемые в шахте посредством тросового поддерживающего кабину устройства, включающего один или группу тяговых элементов. Обычно для поддерживания кабины и противовеса, а также для перемещения кабины по шахте в требуемое положение служит система тросов или ремней. Тяговые элементы обычно направляются группой шкивов, расположение которых соответствует выбранному тросовому поддерживающему кабину устройству. Желательно поддерживать ориентацию тяговых элементов в соответствии с выбранным тросовым поддерживающим кабину устройством.
Во многих лифтовых системах имеются также другие вертикально удлиненные элементы. Компенсация веса длинных тросов обычно осуществляется с помощью уравновешивающих цепей или тросов, расположенных под кабиной или противовесом. Лифтовые системы обычно включают также подвесной кабель, обеспечивающий энергоснабжение и передачу сигналов между компонентами лифтовой системы, связанными с кабиной и неподвижными относительно шахты.
Существуют условия, при которых один или группа удлиненных вертикальных элементов, например тяговых элементов, элементов систем компенсации или подвижный кабель, начинают раскачиваться в пространстве шахты. Этот эффект в наибольшей степени проявляется в высоких зданиях, которые обычно испытывают более сильные колебания, чем менее высокие здания, а также в случаях, когда частота колебаний здания кратна собственной частоте находящегося в шахте вертикального элемента. Известен ряд отрицательных эффектов, связанных с условиями раскачки.
Предлагались различные способы для ослабления или уменьшения раскачивания вертикальных элементов, находящихся в шахте. В одном способе, например, предлагается применение поворотного кронштейна в качестве механического устройства, ослабляющего раскачивание тяговых элементов - см., например, патент U.S. No.5,947,232, в котором представлено подобное устройство. Другое устройство подобного типа представлено в патенте U.S. No.5,103,937.
Еще один способ состоит в том, чтобы присоединить к кабине лифта дополнительную, или ведомую, кабину. По сути, дополнительная кабина подвешивается под первой кабиной и постоянно находится между первой кабиной и дном шахты. Существенный недостаток этого способа состоит в необходимости введения дополнительных компонент и в увеличении стоимости лифтовой системы. Помимо установки дополнительной кабины и соответствующих ей компонент, требуется также увеличение размеров приямка шахты по сравнению с вариантами, в которых нет дополнительной кабины лифта, что ведет к уменьшению полезной площади здания, дополнительным затратам и усложнению конструирования шахты. Кроме того, дополнительная кабина, если даже рассматривать ее лишь как средство для ослабления раскачивания тросов компенсации, создает дополнительные потенциальные сложности при конструировании лифтовых систем.
Другой способ включает управление положением и скоростью движущейся в шахте кабины, ослабляющее раскачивание. Известно, как определить конкретные положения кабины в шахте, которые соответствуют тем специфическим для здания частотам колебаний, при которых наиболее активно возбуждаются колебания удлиненных вертикальных элементов. Один способ включает уменьшение допустимого времени нахождения кабины в так называемых критических зонах, в которых возникают условия, ведущие к раскачиванию. Различные стратегии управления диспетчеризацией для лифтовых систем описаны в заявках WO/2007/013434 и WO/2005/047724.
Хотя применявшиеся ранее способы являются полезными, специалисты в данной области техники, естественно, стремятся к дальнейшим усовершенствованиям и улучшениям.
Раскрытие изобретения
Приводимый в качестве примера способ управления лифтовой системой включает выборочное управление диспетчеризацией, при возникновении условий, вызывающих раскачивание удлиненных вертикальных элементов, связанных с кабиной. Управление диспетчеризацией дает возможность управлять временем, в течение которого кабина будет находиться в заранее определенной критической зоне (при возникновении указанных условий), так, что время нахождения кабины в критической зоне не превышает заданной величины.
Один из вариантов настоящего изобретения описывает способ управления лифтовой системой, включающий выборочное управление диспетчеризацией кабины в состоянии раскачивания удлиненного вертикального элемента, связанного с кабиной, посредством регулирования времени нахождения кабины в заданной критической зоне состояния раскачивания удлиненного вертикального элемента без превышения указанным временем заданного значения. Способ может включать использование первой стратегии управления диспетчеризацией, определение наличия указанного состояния, переключение на вторую стратегию, другую в сравнении с первой, при наличии указанного состояния, при которой исключают превышение указанным временем заданного значения. Также способ может включать использование второй стратегии в состоянии, соответствующем выбранным критериям, и переключение на третью стратегию, другую в сравнении с указанными стратегиями, при состоянии раскачивания, соответствующем другим критериям, причем посредством третьей стратегии устанавливают другое значение времени нахождения кабины в критической зоне. Кроме того, способ может включать определение необходимости обслуживания остановки кабины в критической зоне по запросу пассажира, отказ в обслуживании запроса пассажира при времени его выполнения, большем заданного времени нахождения кабины в критической зоне, и прием обслуживания запроса пассажира, при возможности выполнения его без превышения временем нахождения кабины в критической зоне заданного значения времени. Способ может включать уведомление пассажира средством индикации, при отказе обслуживания запроса, представляющим собой по меньшей мере одну из группы индикаций, включающей звуковую или визуальную индикацию по меньшей мере одним устройством указания целевого этажа, расположенным на панели управления или вне кабины лифта. Способ может также включать предложение пассажиру выбора другого целевого этажа, при отказе на обслуживание запроса. Способ может включать ограничение количества остановок на этажах, расположенных в критической зоне заданным значением. Способ может включать регулирование времени нахождения кабины в критической зоне, посредством изменения параметров движения кабины по меньшей мере во время нахождения кабины в критической зоне. Способ, кроме того, может включать управление количеством пассажиров, обслуживаемых в критической зоне. Способ может включать группировку пассажиров, запрашивающих доставку к группе этажей, расположенных в критической зоне, и назначение группе пассажиров одного этажа для доставки. Указанный этаж может быть расположен в критической зоне. Указанный этаж может примыкать к критической зоне, но быть расположенным вне нее. Способ также может включать регулирование времени нахождения кабины в критической зоне посредством сокращения времени, в течение которого двери кабины открыты при нахождении кабины в критической зоне. Способ, кроме того, может включать назначение одной кабины из группы кабин для обслуживания запроса пассажира в зависимости от количества остановок каждой из кабин в соответствующей критической зоне.
Еще один вариант изобретения описывает лифтовую систему, включающую кабину лифта, удлиненный вертикальный элемент, связанный с кабиной, датчик определения состояния раскачивания удлиненного вертикального элемента, контроллер диспетчеризации, управляющий диспетчеризацией кабины при наличии указанного состояния без превышения временем нахождения кабины в определенной критической зоне заданного значения. Контроллер может быть выполнен с возможностью использования первой стратегии управления диспетчеризацией при отсутствии указанного состояния и переключения на вторую стратегию, другую в сравнении с первой, при наличии состояния раскачивания удлиненного вертикального элемента, причем вторая стратегия исключает превышение указанным временем заданного значения. Контроллер также может быть выполнен с возможностью использования второй стратегии при состоянии раскачивания, соответствующем выбранному критерию, и использования третьей стратегии, другой в сравнении с указанными первой и второй, при состоянии раскачивания, соответствующем другим критериям, причем третья стратегия управления включает задание другого времени, которое кабина может находиться в критической зоне. Кроме того, контроллер может быть выполнен с возможностью определения необходимости остановки кабины в критической зоне при обслуживании запроса пассажира, отказа в обслуживании запроса при времени его выполнении, большем заданного времени нахождения кабины в критической зоне, и приема запроса на обслуживание при возможности его выполнения без превышения временем нахождения кабины в критической зоне заданной величины. Контроллер может быть выполнен с возможностью уведомления пассажира средством индикации при отказе обслуживания запроса, представляющим собой по меньшей мере одну из группы индикации, включающей звуковую или визуальную индикацию по меньшей мере одним устройством указания целевого этажа, расположенным на панели управления или вне кабины лифта. Также контроллер может быть выполнен с возможностью назначения одной кабины из группы кабин лифтовой системы для обслуживания запроса от пассажира в зависимости от количества остановок для каждой из кабин в соответствующей критической зоне.
Различные отличительные признаки и преимущества, раскрываемые в примерах, станут очевидными для специалистов в данной области из следующего далее подробного описания. Чертежи, сопровождающие подробное описание, могут быть кратко описаны следующим образом.
Краткое описание чертежей
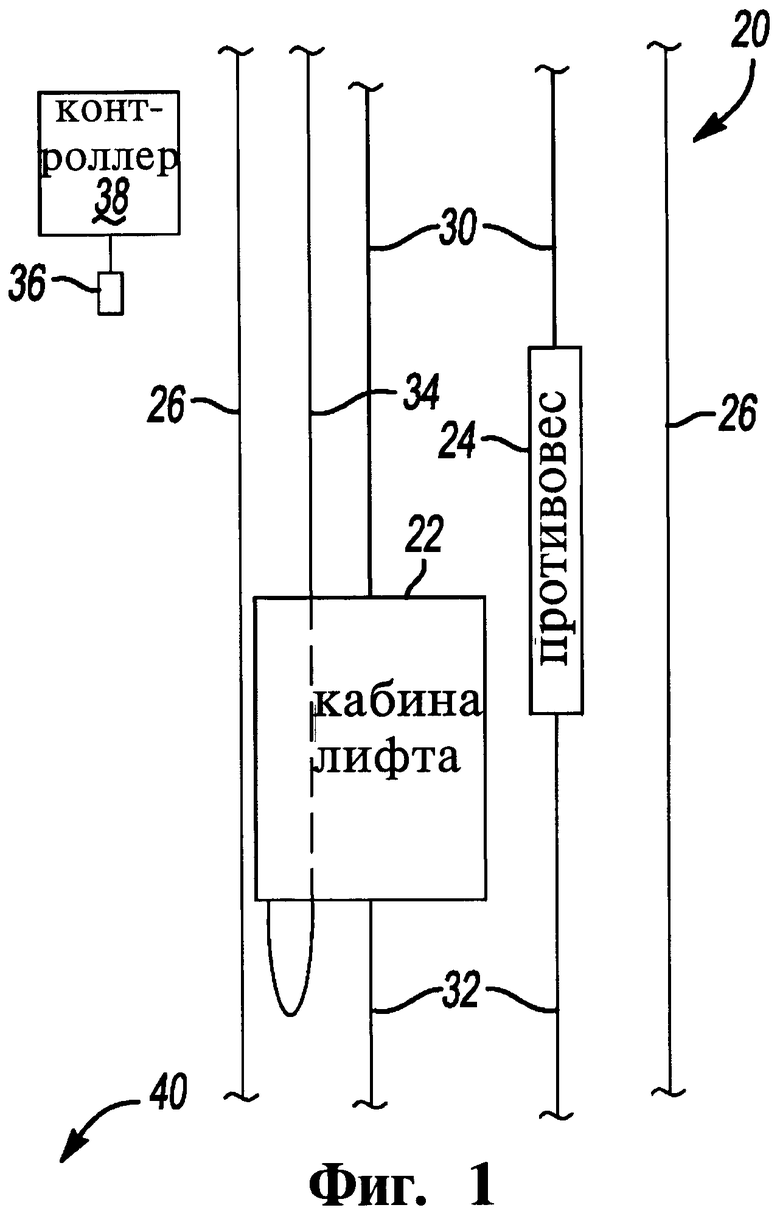
На фиг.1 схематично показаны части лифтовой системы, которая может включать взятый в качестве примера вариант осуществления изобретения.
На фиг.2 схематично представлен в качестве примера один из способов уменьшения колебаний, соответствующий варианту данного изобретения, взятому в качестве примера.
Осуществление изобретения
Варианты данного изобретения, приводимые в качестве примеров, обеспечивают ослабление раскачивания элементов, находящихся в шахте, ограничивая раскачивание одного или группы удлиненных вертикальных элементов, например тяговых элементов (таких как тросы или ремни), привязного элемента системы компенсации или подвижного троса. Стратегическое управление диспетчеризацией кабины дает улучшенный способ уменьшения колебаний по сравнению с ранее применявшимися способами.
На фиг.1 схематично показаны части лифтовой системы 20. Кабина 22 лифта и противовес 24 перемещаются в шахте 26 по известному закону. Кабина 22 и противовес 24 поддерживаются системой тяговых элементов, включающей систему тросов или ремней, поддерживающих кабину 22 и противовес 24 и обеспечивающих их движение по известным законам. Пример тягового элемента 30 показан на фиг.1. В иллюстрирующем варианте элемент 32 весовой компенсации связан с кабиной 22 и противовесом 24, обеспечивая весовую компенсацию известным способом. Подвижный кабель 34 обеспечивает подачу энергии и передачу сигналов между компонентами, связанными с кабиной 22, и по крайней мере одним устройством, которое в типичных случаях установлено неподвижно относительно шахты 26.
Как тяговые элементы 30, так и элемент весовой компенсации 32 и подвижный кабель 34 являются удлиненными вертикальными элементами, находящимися в шахте 26. Любой из удлиненных вертикальных элементов 30, 32, 34 или сразу группа из них могут начать раскачиваться в пространстве шахты 26, если возникнут условия раскачивания. Как известно, колебания здания особенно сильно возбуждают раскачивание удлиненного вертикального элемента, находящегося в шахте, если частота колебаний здания кратна частоте собственных колебаний удлиненного элемента.
Вариант, показанный на фиг.1, включает датчик 36, который работает известным образом, регистрируя любые возможные колебания здания и обнаруживая возникновение условий раскачивания удлиненных вертикальных элементов. В одном варианте датчик 36 может представлять собой датчик маятникового типа. Другой вариант включает датчик определения скорости воздушного потока (анемометр). Датчики в еще одном варианте могут представлять собой акселерометры и амортизирующие грузики, конфигурация которых специально подбирается для конкретного здания. Контроллер 38 связан с датчиком 36 и определяет, возникли ли условия, вызывающие раскачивание по меньшей мере одного из удлиненных вертикальных элементов, находящихся в шахте 26. Контроллер 38 выполнен с возможностью при возникновении указанных условий осуществлять выборочное управление диспетчеризацией кабины.
На фиг.2 представлена блок-схема 40, обобщенно иллюстрирующая способ, применяемый в данном примере. В блоке 42 контроллер 38 выполняет обычное ("нормальное") управление диспетчеризацией. Лифтовая система управляется стратегией обычной диспетчеризации, которая указывает, каким образом одна или группа кабин системы должны отвечать на запросы пассажиров на обслуживание. В одном варианте контроллер 38 функционирует исходя из поступивших запросов на обслуживание, в которых указываются пункты назначения или целевые этажи, а запросы на обслуживание поступают извне кабин. В другом варианте контроллер 38 функционирует на основе запросов, поступающих из кабин, например, через панели управления.
В блоке 44 определяется, возникли ли условия, вызывающие раскачивание. В варианте, показанном на фиг.1, это определяется контроллером 38, который определяет, указывают ли данные, поступающие от датчика 36, что возможно раскачивание одного или группы удлиненных вертикальных элементов. Если это не так, то способ, показанный на фиг.2, продолжается (блок 42) с применением обычной стратегии управления диспетчеризацией. Если возникли условия, вызывающие раскачивание, то используется другая стратегия управления диспетчеризацией.
В варианте, показанном на фиг.2, для других условий, связанных с возможностью раскачивания, используются две различные стратегии управления диспетчеризацией. Вариант, представленный на фиг.2, включает блок 46 принятия решений посредством данных о том, удовлетворяют ли существующие условия выбранным критериям, согласно которым эти условия способствуют раскачиванию. Если так, то диспетчеризация осуществляется в блоке 48 с применением первой стратегии таким образом, чтобы время, в течение которого кабина 22 будет находиться в определенной критической зоне, было меньшим заданного значения. Если критерии, проверяемые в блоке 46, не удовлетворяются, то в блоке 50 определяется, удовлетворяют ли вызывающие раскачивание условия другим критериям (например, являются ли условия еще более неблагоприятными). Если так, то диспетчеризация осуществляется в блоке 52 с использованием второй стратегии управления. Различные стратегии управления позволяют применять различные параметры и управляющие данные, которые следует использовать при различных условиях, вызывающих раскачивание.
Например, при условиях, способствующих развитию лишь относительно небольших колебаний, могут применяться более длинные промежутки времени, в течение которых кабина может находиться в критической зоне. Условия, способствующие развитию более сильных колебаний, с другой стороны, могут потребовать задать меньшие (или нулевые) промежутки времени, в течение которого кабина может оставаться в критической зоне. В примере на фиг.2 допускается выбор различных стратегий управления, осуществляющих диспетчеризацию кабины или группы кабин, в зависимости от критериев, определяющих различные условия, вызывающие раскачивание.
Выборочное управление диспетчеризацией кабины позволяет уменьшить раскачивание или влияние колебаний. Одним из вариантов осуществления данного примера управления диспетчеризацией является возможность ограничить время, которое кабина находится в критической зоне, желательной величиной, выбор которой основан на текущих условиях, вызывающих раскачивание.
Вариант, представленный на фиг.2, включает группу различных способов управления, которые могут быть составной частью первой стратегии управления, второй стратегии управления или обеих стратегий. Один из способов, которым в данном иллюстрирующем примере осуществляется управление диспетчеризацией, состоит в том, чтобы ограничить число остановок кабины в критической зоне (блок 60). Например, первая стратегия управления, применяемая в блоке 48, может ограничить число остановок в критической зоне определенным заданным количеством. Вторая стратегия управления, применяемая в блоке 52, может допускать меньшее количество остановок в критической зоне при условиях, вызывающих раскачивание. Ограничение количества остановок в критической зоне влияет на время, в течение которого кабина находится в критической зоне. В некоторых вариантах возможно ограничить количество остановок в критической зоне так, что не будут допускаться никакие остановки в критической зоне, пока имеют место данные условия, приводящие к раскачиванию определенной интенсивности.
В блоке 62 отражена другая особенность управления, а именно ограничение количества пассажиров, которые могут быть доставлены в критическую зону. Например, может оказаться допустимым доставить в критическую зону пять пассажиров. Выбор допустимого количества пассажиров может зависеть от среднего веса пассажира, времени остановки, способа управления временем остановки в зависимости от количества пассажиров или от комбинации указанных факторов. Специалисты в данной области смогут определить, учитывая конкретную конструкцию лифтовой системы и данное описание, как наилучшим образом управлять количеством пассажиров, доставляемых в критическую зону, чтобы удовлетворить возникающим в конкретных ситуациях требованиям, ограничить раскачивание, управляя временем нахождения кабины в критической зоне.
В блоке 64 производится выбор кабины для выполнения запросов на обслуживание в зависимости от количества запрошенных остановок кабины в критической зоне. Например, контроллер 38 может отвечать за управление количеством пассажиров, для обслуживания которых назначаются определенные кабины, если в лифтовой системе имеется группа кабин. Эта отличительная черта в блоке 64 может включать выбор кабины в зависимости от требуемого количества остановок кабины в критической зоне. Если оказывается, что одна кабина уже должна сделать остановку в критической зоне, то в одном из вариантов предусмотрен выбор другой кабины, для которой в данный момент не назначены остановки в критической зоне. Такой способ позволяет уменьшить время, в течение которого каждая из кабин данного варианта будет находиться в критической зоне. В другом варианте параметры лифтовой системы могут быть такими, что желательным окажется полностью исключить нахождение одной из кабин в критической зоне. В подобном варианте стратегия управления может предпочтительно (или всегда) предназначать для остановки в критической зоне другую кабину.
В блоке 66 варианта, приведенного на фиг.2, предусмотрено выделение групп пассажиров, которые будут доставлены на один и тот же этаж, а не на группу этажей. Эта особенность может оказаться полезной, например, для уменьшения количества остановок в критической зоне. Предположим, что от пяти пассажиров поступили запросы на обслуживание, относящиеся к группе различных этажей, причем все этажи находятся в критической зоне. Тогда рассматриваемая особенность предусматривает выделение группы по крайней мере части из пассажиров, такой что все пассажиры будут доставлены на один и тот же этаж, а не на различные этажи, соответствующие запросам на обслуживание. Например, когда имеют место условия, вызывающие раскачивание, может быть выбран один определенный этаж, находящийся в критической зоне, на который будут доставлены все пассажиры, запросившие обслуживание на доставку в критическую зону. Пассажирам предоставляется определенная информация (визуальная или звуковая) о том, что они будут доставлены на определенный этаж, где они должны будут покинуть кабину. Выбор этажа, на который будут доставлены эти пассажиры, может быть сделан в зависимости от возможности пассажиров перейти в другую кабину на этом этаже или воспользоваться лестницей, чтобы, в конечном счете, оказаться на нужном этаже.
В одном из вариантов все пассажиры, запросившие доставку на этажи, находящиеся в критической зоне, могут быть доставлены на назначенный этаж, находящийся вблизи с критической зоной, но вне нее (примыкая к ней). Выбор этого этажа может осуществляться в зависимости от возможности перехода пассажиров на данном этаже в другую кабину или, например, от возможности воспользоваться лестницей, чтобы, в конечном счете, достичь нужного этажа.
Выделение групп пассажиров и доставка их на один выбранный этаж, заменяющая группу остановок на разных этажах, находящихся в критической зоне, может использоваться для уменьшения количества остановок кабины в критической зоне и для времени, в течение которого кабина остается в критической зоне.
Блок 68 служит для уменьшения времени, в течение которого двери кабины, находящейся в критической зоне, остаются открытыми. При обычной стратегии управления диспетчеризацией при остановке кабины на этаже двери могут быть открыты определенное время. Отличительная черта блока 68 - сокращение времени, в течение которого двери остаются открытыми, что позволяет уменьшить время нахождения кабины на остановке в критической зоне. Этот признак также может быть полезным в сочетании с ограничением количества пассажиров, доставляемых в критическую зону, что показано в блоке 62, так как ограничение количества пассажиров, которые могут покидать находящуюся в критической зоне кабину или входить в нее, позволяет, например, уменьшить время, в течение которого двери остаются открытыми.
Другая особенность продемонстрирована в блоке 70, который включает изменение параметров движения кабины по меньшей мере в критической зоне. Параметры движения кабины обычно управляют такими параметрами, как разгон, замедление, время остановки и изменение ускорения. Если кабина должна переместиться в критическую зону, когда имеют место условия, вызывающие раскачивание, то этот признак включает изменение параметров движения кабины через изменение таких параметров, как разгон, замедление, изменение ускорения, или изменение части из этих параметров одновременно. Пассажир может, например, предпочесть увеличение ускорения при разгоне/замедлении, если он будет доставлен на желательный этаж, находящийся в критической зоне, и не должен будет пройти группу этажей вверх по лестнице из-за отмены остановки кабины в критической зоне. Разумеется, существуют нормативные ограничения на допустимые величины ускорения/замедления и изменения ускорения, и в одной из реализации может быть предусмотрено, например, такое увеличение одного из параметров (с целью ограничения времени нахождения кабины в критической зоне), чтобы его значение оказалось, насколько возможно, близким к диапазону допустимых значений.
Любые особенности или сочетания особенностей, схематично показанных в блоках 60-70, могут быть включены в качестве составной части в первую стратегию управления или вторую стратегию управления в варианте, показанном на фиг.2. Так как различные критерии возникновения упоминаемых выше условий заставляют применять первую или вторую стратегии управления, параметры, определяющие особенности, показанные в блоках 60-70, могут отличаться для двух различных стратегий управления, или же один или группа параметров могут оставаться теми же самыми, что зависит от требований в конкретных ситуациях. Располагая настоящим описанием и данными об особенностях здания и лифтовой системы, специалисты в данной области могут выбрать, какие из особенностей, приведенных в блоках 60-70, являются желательными, и настроить используемые в них параметры.
Данное выше описание имеет иллюстративный, а не ограничительный характер. Вариации и модификации раскрытых вариантов, которые могут оказаться очевидными для специалистов в данной области, не обязательно будут выводить за пределы, характеризующие сущность данного изобретения. Притязания изобретения могут быть определены только по следующей далее формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛИФТОВОЙ СИСТЕМОЙ С ГРУППОЙ КАБИН И ЛИФТОВАЯ СИСТЕМА | 2006 |
|
RU2423310C2 |
| СПОСОБ ПОДДЕРЖАНИЯ РАЗДЕЛИТЕЛЬНОЙ ДИСТАНЦИИ В МНОГОКАБИННОЙ ЛИФТОВОЙ ШАХТЕ И ЛИФТОВАЯ СИСТЕМА | 2007 |
|
RU2456225C2 |
| СПАСАТЕЛЬНАЯ ЛИФТОВАЯ СИСТЕМА | 2009 |
|
RU2500604C2 |
| СПОСОБ СОГЛАСОВАНИЯ ДВИЖЕНИЯ ГРУППЫ КАБИН ЛИФТА, ЛИФТОВАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ КАБИН В ШАХТЕ ЛИФТА | 2007 |
|
RU2442738C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ГРУППЫ КАБИН ЛИФТА И ЛИФТОВАЯ СИСТЕМА | 2008 |
|
RU2456226C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КАБИНЫ ЛИФТА И ЛИФТОВАЯ СИСТЕМА | 2008 |
|
RU2482049C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛИФТАМИ И СПОСОБ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ЛИФТАМИ | 2006 |
|
RU2378178C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛИФТОВОЙ УСТАНОВКОЙ | 2010 |
|
RU2520637C2 |
| ТРАНСПОРТНАЯ СИСТЕМА ВЫСОТНЫХ ЗДАНИЙ | 2012 |
|
RU2503561C2 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ ЛИФТОВАЯ УСТАНОВКА | 2011 |
|
RU2581283C2 |
Изобретение относится к области подъемников и предназначено для выборочного управления диспетчеризацией кабины лифта, когда существуют условия, способствующие возникновению состояния раскачивания кабелей, канатов, противовеса. При возникновении состояния раскачивания удлиненного вертикального элемента (30, 32, 34) осуществляют выборочное управление диспетчеризацией кабины (22) лифта посредством регулирования времени нахождения кабины (22) лифта в заданной критической зоне состояния раскачивания удлиненного вертикального элемента (30, 32, 34) без превышения указанным временем заданного значения. Лифтовая система (20) содержит кабину (22) лифта, удлиненный вертикальный элемент (30, 32, 34), связанный с кабиной (22), контроллер (38) диспетчеризации, управляющий диспетчеризацией кабины (22). Достигается повышение безопасности. 2 н. и 18 з.п. ф-лы, 2 ил.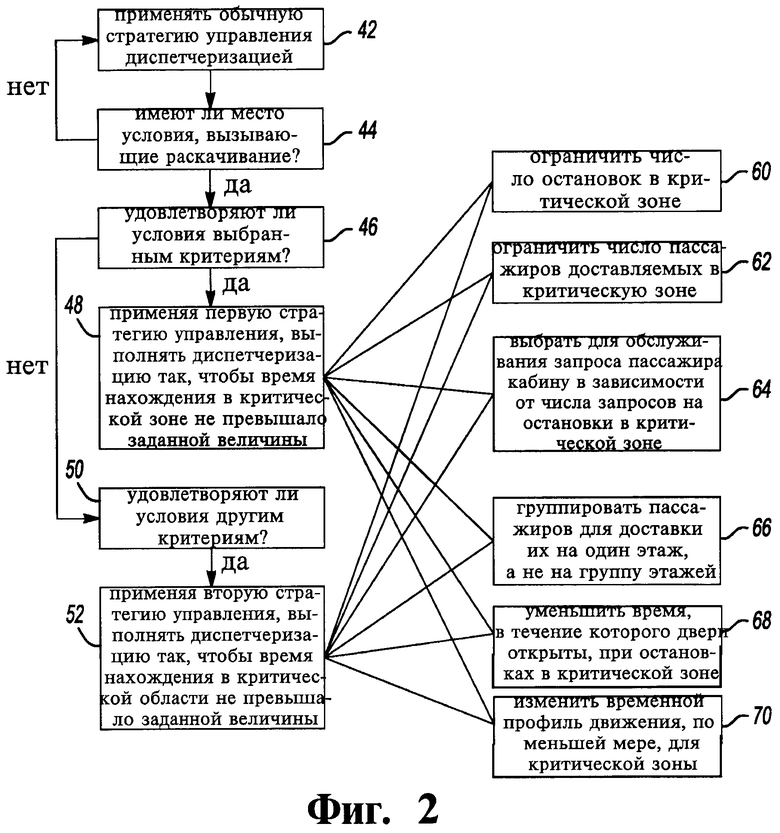
1. Способ управления лифтовой системой, включающий выборочное управление диспетчеризацией кабины в состоянии раскачивания удлиненного вертикального элемента, связанного с кабиной, посредством регулирования времени нахождения кабины в заданной критической зоне состояния раскачивания удлиненного вертикального элемента без превышения указанным временем заданного значения.
2. Способ по п.1, включающий использование первой стратегии управления диспетчеризацией, определение наличия указанного состояния, переключение на вторую стратегию, другую в сравнении с первой, при наличии указанного состояния, при которой исключают превышение указанным временем заданного значения.
3. Способ по п.2, включающий использование второй стратегии в состоянии, соответствующем выбранным критериям, и переключение на третью стратегию, другую в сравнении с указанными стратегиями, при состоянии раскачивания, соответствующем другим критериям, причем посредством третьей стратегии устанавливают другое значение времени нахождения кабины в критической зоне.
4. Способ по п.1, включающий определение необходимости обслуживания запроса пассажира на остановку кабины в критической зоне, отказ в обслуживании запроса пассажира при времени его выполнения, большем заданного времени нахождения кабины в критической зоне, и прием обслуживания запроса пассажира, при выполнении его без превышения временем нахождения кабины в критической зоне заданного значения времени.
5. Способ по п.4, включающий уведомление пассажира по меньшей мере одним средством индикации, выбранным из группы, включающей звуковую или визуальную индикацию по меньшей мере одним устройством указания целевого этажа, расположенным на панели управления или вне кабины лифта, при отказе обслуживания запроса.
6. Способ по п.4, включающий предложение пассажиру выбора другого целевого этажа при отказе обслуживания запроса.
7. Способ по п.1, включающий ограничение количества остановок на этажах, расположенных в критической зоне, заданным значением.
8. Способ по п.1, включающий регулирование времени нахождения кабины в критической зоне посредством изменения параметров движения кабины при нахождении кабины в критической зоне.
9. Способ по п.1, включающий управление количеством пассажиров, обслуживаемых в критической зоне.
10. Способ по п.1, включающий группировку пассажиров, которые запрашивают доставку к группе этажей, расположенных в критической зоне, и назначение группе пассажиров одного этажа для доставки.
11. Способ по п.10, в котором указанный этаж расположен в критической зоне.
12. Способ по п.10, в котором указанный этаж расположен примыкающим к критической зоне и вне нее.
13. Способ по п.1, включающий регулирование времени нахождения кабины в критической зоне посредством сокращения времени, в течение которого двери кабины открыты.
14. Способ по п.1, включающий назначение одной кабины из группы кабин для обслуживания запроса пассажира в зависимости от количества остановок каждой из кабин в соответствующей критической зоне.
15. Лифтовая система, включающая кабину лифта, удлиненный вертикальный элемент, связанный с кабиной, датчик определения состояния раскачивания удлиненного вертикального элемента, контроллер диспетчеризации, управляющий диспетчеризацией кабины при наличии указанного состояния без превышения временем нахождения кабины в определенной критической зоне заданного значения.
16. Система по п.15, в которой контроллер выполнен с возможностью использования первой стратегии управления диспетчеризацией, при отсутствии указанного состояния и переключения на вторую стратегию, другую в сравнении с первой, при наличии состояния раскачивания удлиненного вертикального элемента, причем вторая стратегия исключает превышение указанным временем заданного значения.
17. Система по п.16, в которой контроллер выполнен с возможностью использования второй стратегии при состоянии раскачивания, соответствующем выбранному критерию, и использования третьей стратегии, другой в сравнении с указанными первой и второй, при состоянии раскачивания, соответствующем другим критериям, причем третья стратегия управления включает задание другого времени нахождения кабины в критической зоне, в течение которого кабина может находиться в критической зоне.
18. Система по п.15, в которой контроллер выполнен с возможностью определения необходимости остановки кабины в критической зоне при обслуживании запроса пассажира, отказа в обслуживании запроса, при времени его выполнении, большем заданного времени нахождения кабины в критической зоне, и приема запроса на обслуживание, при его выполнении без превышения временем нахождения кабины в критической зоне заданной величины.
19. Система по п.18, в которой контроллер выполнен с возможностью уведомления пассажира по меньшей мере одним средством индикации, выбранным из группы, включающей звуковую или визуальную индикацию по меньшей мере одним устройством указания целевого этажа, расположенным на панели управления или вне кабины лифта, при отказе обслуживания запроса.
20. Система по п.15, которая дополнительно включает группу кабин, а контроллер выполнен с возможностью назначения одной кабины из группы кабин для обслуживания запроса от пассажира в зависимости от количества остановок для каждой из кабин в соответствующей критической зоне.
| JP 2007031049 A, 08.02.2007 | |||
| CN 101016131 A, 15.08.2007 | |||
| JP 2004250217 A, 09.09.2004 | |||
| JP 2004262613 A, 24.09.2004 | |||
| Устройство для предотвращения колебаний уравновешивающих канатов грузоподъемных машин | 1971 |
|
SU369780A1 |
| JP 2007331901 A, 27.12.2007 | |||
| WO 2007099619 A1, 07.09.2007. | |||

