Область техники, к которой относится изобретение
Настоящее изобретение относится к регулируемым лифтовым системам. В частности, изобретение относится к регулированию дистанции между опережающей кабиной лифта и последующей кабиной лифта, двигающимися в шахте лифта в одном направлении.
Уровень техники
Задача, возникающая при разработке лифтовой системы, заключается в том, чтобы минимизировать необходимое число шахт лифта, используемых в лифтовой системе, при одновременном стремлении к удовлетворению запросов на транспортировку пассажиров и грузов внутри здания.
Решения, направленные на уменьшение числа шахт лифта и улучшение обслуживания, заключались в увеличении скорости движения лифта, уменьшении времени открывания и закрывания дверей, усовершенствовании систем управления, введении безостановочных лифтов, разбиении здания на зоны и т.д. Однако в многоэтажных зданиях такие меры могут приводить к возникновению беспокойства при ускорении лифтов, неудобству при быстром закрывании дверей или дискомфорту в результате использования усложненной системы, при которой пассажирам приходится делать пересадки из кабины в кабину несколько раз, чтобы достичь нужного этажа.
Один из подходов к увеличению эффективности перевозки пассажиров при минимизации числа шахт лифта заключается в том, чтобы в каждой шахте лифта объединить несколько независимо регулируемых кабин лифта, каждая из которых может обслуживать большинство или все этажи здания. В такой системе каждая кабина лифта должна находиться от других кабин на определенной дистанции, обеспечивающей безопасную работу кабин лифта. Если две или более кабин лифта двигаются в шахте лифта в одном направлении, график движения, предписанный кабинам лифта, становится важным фактором в смысле избежания столкновения между кабинами при назначенных и неожиданных остановках.
В свете вышесказанного настоящее изобретение направлено на удовлетворение необходимости в обеспечении необходимой и достаточной дистанции между кабинами лифтов, движущимися в шахте лифта в одном направлении.
Раскрытие изобретения
Настоящее изобретение относится к поддержанию разделительной дистанции между опережающей кабиной лифта и последующей кабиной лифта, двигающимися в шахте лифта в одном направлении. Могут определяться кратчайший тормозной путь опережающей кабины лифта и нормальный тормозной путь последующей кабины лифта. Дистанцию между кабинами регулируют так, что разность между нормальным тормозным путем последующей кабины лифта и кратчайшим тормозным путем опережающей кабины лифта была большей или равной пороговой дистанции. Другими словами, дистанция регулируется так, чтобы конечное положение остановившейся опережающей кабины, представляющее собой местоположение, в котором остановилась бы опережающая кабина в случае аварийного торможения, было отделено от конечного обычного положения остановившейся последующей кабины, представляющего собой местоположение, в котором остановилась бы последующая кабина в нормальном режиме торможения, по крайней мере на расстояние, равное пороговой дистанции.
Вариант изобретения описывает способ поддержания разделительной дистанции между опережающей и последующей кабинами, перемещающимися в одном направлении в шахте лифта, при котором определяют кратчайший тормозной путь опережающей кабины и нормальный тормозной путь последующей кабины и регулируют дистанцию так, что разность между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины является большей или равной пороговой дистанции. В другом варианте могут дополнительно многократно повторять определение тормозных путей и регулирование расстояния при движении опережающей и/или последующей кабин в шахте лифта. Кроме того, до начала движения опережающей и последующей кабин в одном направлении при регулировании могут задерживать начало движения последующей кабины, пока дистанция между опережающей кабиной и последующей кабиной не станет равной по меньшей мере дистанции при движении опережающей и последующей кабин в одном направлении в шахте лифта. Также дополнительно при задержке начала движения последующей кабины могут определять запланированное время 0≤Т≤Тt движения последующей кабины, запланированное местоположение θt и запланированный нормальный тормозной путь πnst последующей кабины, запланированное время 0≤T≤T1 движения опережающей кабины, запланированное местоположение θ1 и запланированный кратчайший тормозной путь πss1 опережающей кабины и проверять выполнение условия:
|(θ1(T+Trun)+πss1(T+Trun))-(θt(T)+πnst(T)|≥dthresh,
где 0≤T≤min {Тt, T1-Trun}, где Trun - фактическое время движения опережающей кабины (т.е. в течение которого уже двигалась опережающая кабина), dthresh - пороговая дистанция, а 0≤Тrun≤Т1.
Также при регулировании могут останавливать или снижать скорость последующей кабины при разности между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины меньшей пороговой дистанции. Кроме того, при определении кратчайшего тормозного пути опережающей кабины могут измерять по меньшей мере один параметр движения опережающей кабины, выбранный из группы, включающей скорость, направление, ускорение, загрузку и изменение ускорения опережающей кабины. Причем могут определять тормозной путь опережающей кабины при максимальном замедлении на основе по меньшей мере одного измеренного параметра движения. В одном из вариантов кратчайшим тормозным путем опережающей кабины может являться аварийный тормозной путь. Дополнительно при определении нормального тормозного пути последующей кабины могут измерять по меньшей мере один параметр движения последующей кабины, выбранный из группы, включающей скорость, направление, ускорение, загрузку и изменение ускорения последующей кабины. Причем могут определять тормозной путь при регулируемой интенсивности торможения на основе по меньшей мере одного измеренного параметра движения. Пороговое расстояние может составлять по меньшей мере около высоты одного этажа.
Другой вариант осуществления изобретения описывает лифтовую систему, включающую шахту лифта, первую и вторую кабины лифта, расположенные в шахте лифта, и контроллер, выполненный с возможностью приведения в движение первой и второй кабин, причем если первая и вторая кабины двигаются в одном направлении, одна из первой и второй кабин является опережающей кабиной лифта, и другая из первой и второй кабин является последующей кабиной лифта, и поддержания разделительной дистанции между первой и второй кабинами такой, что разность между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины была бы большей или равной пороговой дистанции. Нормальный тормозной путь последующей кабины также может зависеть от по меньшей мере одного параметра движения, выбранного из группы, включающей скорость, направление, ускорение, загрузку и изменение ускорения последующей кабины при нормальных условиях работы. Кратчайший тормозной путь опережающей кабины может зависеть от по меньшей мере одного параметра движения опережающей кабины. Пороговая дистанция может составлять по меньшей мере около одного этажного уровня. Контроллер может быть выполнен с возможностью остановки или снижения скорости последующей кабины при разности между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины, меньшей пороговой дистанции.
Должно быть понятно, что как предшествующее общее описание, так и последующее подробное описание являются только пояснением и не ограничивают изобретение в заявленном виде.
Краткое описание чертежей
Сущность и преимущества настоящего изобретения станут понятны из нижеследующего описания, приложенной формулы изобретения и сопровождающих иллюстративных вариантов осуществления, представленных на чертежах, на которых показано:
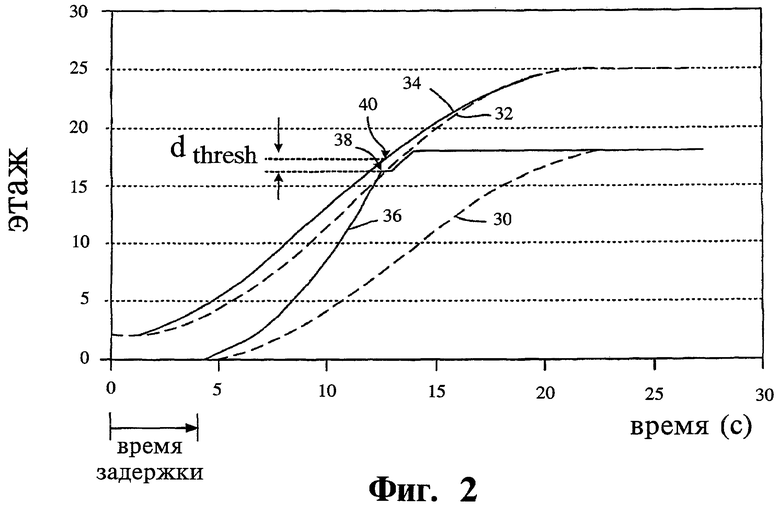
на фиг.1 - схематическое представление варианта осуществления лифтовой системы, включающей группу независимо регулируемых кабин, выполненных с возможностью перемещаться в одном направлении в шахте лифта;
на фиг.2 - график, отображающий зависимость от времени: нормальное ходовое положение и положение при аварийной остановке опережающей кабины лифта и нормальное ходовое положение и положение при нормальной остановке последующей кабины лифта, движущейся в шахте лифта в том же направлении, что и опережающая кабина.
Осуществление изобретения
На фиг.1 схематически изображена лифтовая система 10, включающая первую кабину 12 лифта и вторую кабину 14 лифта, расположенные на одной вертикали относительно друг друга в шахте 16 лифта. В данном варианте шахта 16 лифта находится в здании, имеющем тридцать этажей L1-L30, и выполнена так, чтобы первая кабина 12 и вторая кабина 14 могли обслуживать запросы пассажиров на большинстве этажей или на всех этажах. Контроллер 18 соединен с первым подъемным механизмом 20 (лебедкой) и вторым подъемным механизмом 22. Первый подъемный механизм 20 содержит механический узел, приводящий в действие первую кабину 12, и второй подъемный механизм 22 содержит механический узел, приводящий в действие вторую кабину 14.
Кабины 12 и 14 независимо управляются контроллером 18 (соответственно через механизмы 20 и 22) по запросам на обслуживание, получаемым от кнопок вызова, установленных на этажах L1-L30. Контроллер 18 воспринимает запросы на обслуживание от пассажиров, находящихся на этажах L1-L30, и управляет работой кабин 12 и 14 так, чтобы эффективно и безопасно доставить пассажиров на их соответствующие этажи назначения. Контроллер 18 отслеживает и управляет местоположением, скоростью и ускорением (которое может быть положительным или отрицательным) каждой кабины 12 и 14, выполняющей запросы пассажиров. В некоторых вариантах осуществления контроллер 18 определяет местоположение и скорость кабин 12 и 14 на основе данных, поступающих в него с датчиков скорости, установленных на подъемных механизмах 20 и 22 соответственно.
Шахта 16 может быть выполнена так, что кабина 12 обслуживает все этажи за исключением самого верхнего, недоступного из-за нахождения на нем кабины 14, и при которой кабина 14 обслуживает все этажи за исключением самого нижнего из-за нахождения на нем кабины 12. Альтернативно шахта 16 лифта может иметь парковочную зону, лежащую ниже этажа L1, так что кабина 12 может быть там временно размещена, чтобы дать возможность кабине 14 выполнить запросы, относящиеся к этажу L1. Аналогично шахта 16 лифта может иметь парковочную зону, лежащую выше этажа L30, так что кабина 14 может быть там временно размещена, чтобы дать возможность кабине 12 достичь этажа L30. Следует отметить, что хотя показаны тридцать этажей L1-L30, лифтовая система 10 может быть приспособлена для работы в здании, имеющем любое число этажей. Хотя показаны две расположенные на одной вертикали кабины 12 и 14, в шахте 16 лифта может быть размещено любое число кабин, предназначенных для обслуживания большинства или всех этажей в здании. Когда запросы на обслуживание требуют, чтобы кабины 12 и 14 двигались в одном направлении в шахте 16 лифта, контроллер 18 регулирует расстояние между ними так, чтобы обеспечить остановку последующей из двух кабин в основном с нормальной (то есть контролируемой) скоростью, если опережающая из двух кабин сделала внезапную остановку (например, аварийную остановку). Под термином "нормальная скорость остановки" (и "остановка в нормальном режиме") следует подразумевать контролируемую скорость, с которой кабина замедляется и останавливается при определенной скорости перемещения. Таким образом, так как "нормальная" остановка в любой момент времени может быть вызвана соответствующей аварийной остановкой, существует вероятность того, что последующая кабина не будет остановлена у посадочной площадки лифта.
Например, если кабина 12, находящаяся на этаже L13, должна обслужить запрос пассажира с этажа L17, а кабина 14, находящаяся на этаже L16, должна обслужить запрос пассажира с этажа L20, то обе кабины движутся вверх в шахте лифта, чтобы выполнить соответствующие запросы. В этом примере кабина 14 является опережающей кабиной, и кабина 12 - последующей кабиной. Контроллер 18 регулирует работу подъемного механизма 20, обеспечивая в любой момент времени, чтобы, если опережающая кабина 14 делает внезапную остановку из-за возникновения ненормальной (например, аварийной) ситуации, последующая кабина 12 была бы способна остановиться в нормальном режиме торможения, и после этого сохранялась бы по меньшей мере минимальная или пороговая дистанция от опережающей кабины 14.
Для определения приемлемого расстояния между кабинами 12 и 14 контроллер 18 анализирует различные параметры, составляющие профиль движения каждой кабины. Параметры, имеющие отношения к изменению во времени положения на всем пути следования, называются "профилем движения" кабины. Например, контроллер 18 может построить профиль движения для каждой из кабин 12 и 14, основанный на максимальном ускорении, максимальной скорости в установившемся режиме, максимальном замедлении, направлении (вверх или вниз) и изменении ускорения (то есть третьей производной от координаты), для нормального режима работы.
При изменении скорости, направления, ускорения каждой из кабин 12, 14 при их движении по своим траекториям разделительная дистанция dsep между кабинами 12 и 14 также должна меняться, то есть разделительная дистанция dsep есть переменная величина. Контроллер 18 регулирует разделительную дистанцию между кабинами 12 и 14, движущимися в одном направлении, постоянно (или периодически) определяя кратчайший тормозной путь dss1 опережающей кабины и нормальный тормозной путь dnst последующей кабины. В приведенном выше варианте опережающей кабиной является кабина 14. Кратчайший тормозной путь dss1 - расстояние, которое преодолевает опережающая кабина 14 при движении с максимальным замедлением. Опережающая кабина 14 может двигаться с максимальным замедлением при срабатывании аварийного тормоза, например, в случае возникновения аварийной ситуации. Кратчайший тормозной путь dss1 является функцией по меньшей мере скорости, направления, ускорения, изменения ускорения кабины 14, а также ее загрузки. Контроллер 18 может определять скорость, направление, ускорение и загрузку опережающей кабины 14 на основе данных, передаваемых датчиками, связанными, например, с опережающей кабиной 14 и/или подъемным механизмом 22. В приведенном выше варианте последующей кабиной является кабина 12. Нормальный тормозной путь dnst последующей кабины 12 может быть определен на основе профиля движения последующей кабины 12, сохраненного в контроллере 18, а также скорости, направления, ускорения и загрузки последующей кабины 12. Следует отметить, что нормальный тормозной путь dnst необязательно зависит от скорости торможения последующей кабины 12 в нормальном режиме работы, но скорее может зависеть от некоторой скорости торможения, при которой сохраняется минимальный уровень комфорта для пассажиров последующей кабины 12.
Как отмечено выше, контроллер 18 непрерывно (или периодически) определяет нормальный путь торможения dnst последующей кабины 12 и кратчайший тормозной путь dss1 опережающей кабины 14 на основе измеренных загрузки и параметров движения (например, скорости, направления, ускорения и изменения ускорения) каждой из кабин 12 и 14. Эти получаемые непрерывно (или периодически) результаты измерений могут быть обсчитаны различными способами, включающими имитационное моделирование, численные методы, аналитические выражения и т.п., с использованием профилей движения кабин 12 и 14. Контроллер 18 может также сравнить измеренные загрузку и параметры движения каждой кабины 12 и 14 с данными, сохраненными в справочной таблице или другом документе, с целью определения текущего значения нормального тормозного пути dnst и кратчайшего тормозного пути dss1. В любом случае нормальный тормозной путь dnst последующей кабины 12 и кратчайший тормозной путь dss1 опережающей кабины 14 определяются в реальном времени как переменные по времени скорость, направление, ускорение и загрузка каждой кабины 12 и 14. По существу, если обе кабины 12 и 14 перемещаются на полной скорости, разделительная дистанция, поддерживаемая между кабинами, больше, чем разделительная дистанция, устанавливаемая между ними, когда кабины или только начинают движение, или почти останавливаются в нормальном режиме торможения.
Контроллер 18 обеспечивает, чтобы разделительная дистанция dsep между кабинами 12 и 14 была такова, что в любой момент времени, если опережающая кабина 14 вынужденно останавливается в режиме аварийного торможения, последующая кабина сможет остановиться в нормальном режиме торможения с соблюдением в результате расстояния между кабинами 12 и 14, по меньшей мере равного пороговой дистанции dthresh. В некоторых вариантах осуществления пороговая дистанция составляет одну или две высоты этажа, в других вариантах может быть существенно меньше высоты одного этажа (так что кабины могут одновременно принимать пассажиров на соседних этажах) или может быть больше, чем высота двух этажей. В пороговую дистанцию dthresh может также входить граница безопасности, обеспечивающая учет ошибок измерения, которые могут иметь место при определении тормозных путей кабин 12 и 14. Во всяком случае контроллер 18 обеспечивает выполнение следующего неравенства в случае остановки обеих кабин в нормальном режиме торможения:
 ,
,
в котором y1 - координата остановленной опережающей кабины (в приведенном выше примере кабины 14), и yt - координата остановленной последующей кабины (в приведенном примере кабины 12).
Если кабины 12 и 14 обе движутся в одном направлении, то для выполнения неравенства (1) контроллер 18 также непрерывно (или периодически) определяет нормальный тормозной путь dnst, необходимый последующей кабине 12, и кратчайший тормозной путь dss1, необходимый опережающей кабине 14. В частности, контроллер 18 управляет последующей кабиной 12, так чтобы в случае остановки опережающей кабины 14 с максимальным замедлением последующая кабина 12 могла остановиться с нормальным замедлением и остаться разделенной от опережающей кабины 14 пороговой дистанцией dthresh. Поэтому расстояние dsep представляет собой переменную по времени в том смысле, что оно непрерывно (или периодически) определяется контроллером 18 в процессе движения последующей кабины 12.
Чтобы представить себе динамическую сущность dsep, необходимо предположить, что Тstart - это время начала движения последующей кабины 12, а Tend - время окончания ее движения. Также надо представить, что х1(Т) - это координата опережающей кабины в момент времени Т, и xt(T) - координата последующей кабины в момент времени Т. Кратчайший тормозной путь опережающей кабины dss1(T) также зависит от времени, так как параметры, от которых зависит тормозной путь (такие, как скорость, ускорение и т.д.), также меняются во времени. По аналогичным соображениям нормальный тормозной путь dnst(T) также меняется во времени. Тогда контроллер 18 обеспечивает, чтобы для Tstart≤T≤Tend выполнялось:

Важно отметить, что dsep изменяется как функция от времени, в то время как dthresh постоянна.
Ввиду динамической сущности dsep, если опережающая кабина 14 останавливается с максимальным замедлением, последующая кабина 12 может быть вслед за ней остановлена при нормальных параметрах торможения в любом месте шахты 16 так, что возникшее при этом остановленное положение последующей кабины 12 отделено от возникшего остановленного положения опережающей кабины 14 по меньшей мере на величину пороговой дистанции dthresh. За счет регулирования разделительной дистанции dsep, дающего возможность последующей кабине 12 остановиться с нормальными параметрами торможения, негативное влияние на качество перемещения последующей кабины 12, за исключением самого факта неожиданной остановки, в значительной степени, если не полностью, устраняется.
Если в любой момент времени контроллер 18 определяет, что в данный момент времени действительное расстояние dact между кабинами 12 и 14 меньше требуемой разделительной дистанции dsep и что кабины 12 и 14 движутся в шахте 16 в одном направлении, контроллер 18 может снизить скорость последующей кабины 12, чтобы обеспечить необходимую разделительную дистанцию dsep. За счет снижения скорости последующей кабины 12 действительное расстояние dact между опережающей кабиной 14 и последующей кабиной 12 увеличивается, и нормальный тормозной путь dnst последующей кабины 12 уменьшается. Альтернативно контроллер 18 может остановить последующую кабину 12 при нормальных параметрах замедления и возобновить ее движение, только когда последующая кабина 12 сможет обслужить свои первоначальные заказы без повторного нарушения разделительной дистанции dsep.
В некоторых вариантах осуществления котроллер 18 может задержать начало движения последующей кабины 12 до тех пор, пока разделительная дистанция между последующей кабиной 12 и опережающей кабиной 14 не станет достаточно большой, чтобы выполнялось неравенство (2) для момента времени, при котором последующая кабина 12 начнет движение вверх к своему следующему пункту назначения. При этом для постоянного соблюдения неравенства (2) контроллеру 18 может не понадобиться выполнять частые регулировки в процессе движения кабины 12. В частности, в одном из вариантов осуществления используется способ определения того, нужна ли задержка начала движения последующей кабины. В этом способе используют модели планирования траектории движения каждой кабины, обеспечивающие выполнение условия, представленного в неравенстве (2), в течение времени, когда последующая и опережающая кабины двигаются в одинаковом направлении. Положим θ1(T) для 0≤T≤T1 есть запланированное положение во время Т опережающей кабины, подчиняющейся модели планирования траектории движения, по которой кабина начинает движение со своего начального этажа в момент времени 0 и прибывает на свой этаж назначения в момент времени T1, и положим θt(Т) для 0≤Т≤Тt есть запланированное положение во время Т последующей кабины, подчиняющейся модели планирования траектории движения, по которой кабина начинает движение со своего начального этажа в момент времени 0 и прибывает на свой этаж назначения в момент времени Тt. Предположим, что в конкретный момент времени последующая кабина 12 стоит на некотором этаже и готова начать движение к этажу назначения, а опережающая кабина 14 уже движется в течение фактического времени Тrun со своего начального этажа к своему этажу назначения, причем 0≤Trun≤Tl. В этом случае контроллер 18 может дать разрешение на начало движения последующей кабины 12, только если выполняется следующее условие:

где 0≤Т≤min {Tt,T1-Trun); πnst(T) - запланированный нормальный тормозной путь последующей кабины для времени Т; и πssl(T) - запланированный кратчайший тормозной путь опережающей кабины для времени Т.
Заметим, что, так как опережающая кабина уже движется в течение фактического времени Trun, единственный промежуток времени, когда обе кабины движутся, лежит между 0 и минимальным значением из (а) времени движения последующей кабины Tt и (б) оставшимся временем Т1-Тrun, в течение которого движется последующая кабина.
Если выполняется неравенство (3), последующая кабина 12 может начать движение без задержки. Однако, если неравенство (3) не выполняется, последующая кабина 12 может подождать некоторое время и быть обсчитана заново, если условие выполняется (к тому времени Тrun увеличится). Альтернативно можно определять требуемую задержку нахождением минимального значения Tdelay≥0, удовлетворяющего соотношению:

где 0≤T≤min {Tt, Т1-Trun-Тdeley}.
Заметим, что модели планирования траектории движения для θ1(Т), πss1(T), θt(T) и πnst(T) могут представлять собой имитационную модель, численную модель или аналитическое выражение.
В другом варианте осуществления, если нижняя кабина 12 должна двигаться вверх, верхняя кабина неподвижна, и дистанция между верхней кабиной 14 и местом назначения предназначенной для движения вверх нижней кабины 12 меньше, чем пороговая дистанция dthresh, контроллер 18 может задержать движение вверх нижней кабины 12 к своему пункту назначения, до тех пор пока верхняя кабина не пройдет вверх достаточное расстояние, чтобы выполнялось неравенство (2). Конечно, движение вверх верхней кабины 14 могло бы происходить одновременно с движением вверх нижней кабины к своему пункту назначения. Однако, если верхняя кабина не готова двигаться вверх в соответствующий момент времени (например, из-за задержки посадки/высадки пассажиров), другой путь потенциальной возможности несоблюдения dthresh состоит в том, чтобы в этих условиях контроллер 18 остановил нижнюю кабину 12 в положении, соответствующем удовлетворению неравенства (2).
В еще одном варианте осуществления, если обе кабины 12 и 14 перемещаются в одном направлении в шахте 16 и разделены действительным расстоянием, которое намного больше разделительной дистанции dsep, и если опережающая кабина 14 внезапно останавливается, контроллер 18 может выбрать остановки одним из трех способов. Во-первых, контроллер может немедленно остановить последующую кабину 12 в нормальном режиме торможения. Во-вторых, контроллер 18 может дать возможность последующей кабине 12 продолжить движение, до тех пор пока реальное расстояние между кабинами 12 и 14 не станет равным разделительному расстоянию dsep, и в этой точке остановить последующую кабину 12 в нормальном режиме торможения. В третьих, контроллер может заставить кабину 12 продолжать движение еще на определенное расстояние, после которого начать остановку кабины в нормальном режиме торможения, причем кабина 12 закончит движение в положении, при котором она будет находиться у двери (дверей) шахты лифта на определенном этаже, так что пассажиры последующей кабины 12 смогут покинуть ее обычным образом.
Следует отметить, что, хотя представленные варианты относятся к ситуациям, когда обе кабины 12 и 14 движутся вверх, аналогичный прием может быть использован и в лифтовой системе 10, если обе кабины 12 и 14, выполняя запросы, движутся вниз. В этом случае кабина 12 стала бы опережающей кабиной, и кабина 14 - последующей кабиной.
На фиг.2 представлен график, отображающий в функции от времени местоположение X1 опережающей кабины 14 и местоположение Xt последующей кабины 12 при их движении в одном направлении в шахте 16 лифта. В частности, кривая 30 изображает в функции от времени местоположение Xt последующей кабины 12, перемещающейся в нормальном рабочем режиме, и кривая 32 изображает в функции от времени местоположение Х1 опережающей кабины 14, перемещающейся в нормальном рабочем режиме в соответствии с профилем движения опережающей кабины 14, сохраненным в контроллере 18. Кривая 34 изображает зависимость от времени местоположения Y1(T) опережающей кабины 14, остановленной при максимальном замедлении (например, при срабатывании аварийного тормоза). Иными словами, если опережающая кабина 14 остановлена при максимальном замедлении в любой момент времени, отмеченный на кривой 32, то она будет находиться в соответствующем местоположении на кривой 34 (то есть X1+dss1), которое на кривой 34 отмечено непосредственно над моментом времени на кривой 32, в который возникло максимальное замедление, то есть, хотя опережающая кабина 14 остановится (отсчитывая по кривой 34) в момент времени, который находится после момента времени (отсчитывая по кривой 32), в который возникло максимальное замедление, остановленное местоположение (на кривой 34) показано в тот же момент времени для удобства рассмотрения. Кривая 36 изображает в функции от времени остановленное местоположение Yt(T) последующей кабины 12 лифта при нормальном режиме торможения в соответствии с профилем движения последующей кабины 12, сохраненным в контроллере 18. Иными словами, если последующая кабина 12 остановлена при нормальном замедлении в любой момент времени, отмеченный на кривой 30, то она будет находиться в соответствующем местоположении на кривой 36 (то есть Xt+dsst). которое на кривой 36 отмечено непосредственно над моментом времени на кривой 30, в который возникло нормальное замедление, то есть, хотя последующая кабина 12 остановится (отсчитывая по кривой 36) в момент времени, который находится после момента времени (отсчитывая по кривой 30), в который возникло нормальное замедление, остановленное местоположение (на кривой 36) показано в тот же момент времени для удобства рассмотрения.
Для того чтобы обеспечить удаление кабин на разделительную дистанцию dsep с самого начала их движения, кабина 14 начинает свое движение в момент времени 0 с, как показано кривой 32, в то время как кабина 12 остается на исходной позиции, как показано кривой 30. Время, в течение которого кабина 12 удерживается в исходном положении, обозначено как время задержки. В представленном варианте осуществления время задержки tdelay приблизительно равно 3,72 с. По истечении времени задержки tdelay контроллер 18 начинает движение вверх кабины 12. В некоторых вариантах осуществления время задержки tdelay устанавливается таким образом, чтобы неравенство (2) выполнялось с момента начала движения вверх последующей кабины 12 и до выполнения всех запросов последующей кабиной 12 при ее движении вверх. Другими словами время задержки tdelay может быть установлено так, чтобы перед контроллером 18 не возникало необходимости при движении кабины 12 частой регулировки для постоянного выполнения неравенства (4). В других вариантах осуществления tdelay может быть больше, чем необходимо, так чтобы обеспечивать буферное время безопасности в лифтовой системе 10, и в этом буферном времени безопасности могут быть учтены все ошибки определения разделительной дистанции dsep. Для обеспечения возможности последующей кабине 12 двигаться как можно ближе за опережающей кабиной 14 при одновременном соблюдении dsep таким, чтобы последующая кабина 12 всегда могла остановиться в нормальном режиме торможения, улучшают параметры диспетчеризации лифтовой системы 10 таким образом, чтобы учитывались безопасность и качество движения.
В другом варианте осуществления настоящего изобретения, если кабинам 12 и 14 назначено двигаться в одном направлении, но они разделены дистанцией, которая намного больше разделительной дистанции dsep, последующая кабина 12 может получить команду на движение до того, как такую команду получит опережающая кабина 14. В этом случае время задержки опережающей кабины 14 фактически представляет собой отрицательную величину. Конечно, если по какой-либо причине опережающая кабина 14 не начнет движение, как было первоначально запланировано, и реальное расстояние между кабинами 12 и 14 становится равным разделительной дистанции dsep, контроллер 18 может дать команду последующей кабине 12 на условную остановку в нормальном режиме торможения. Если пункт назначения последующей кабины 12 вступает в конфликт с текущим положением опережающей кабины 14, контроллер 18 может дать команду последующей кабине 12 сделать условную остановку в нормальном режиме торможения, до тех пор пока опережающая кабина 14 не начнет движение, отдаляясь от последующей кабины 12 и тем самым обеспечивая достижение последующей кабиной 12 ее пункта назначения.
Контроллер 18 отслеживает расстояние между кабинами 12 и 14 для обеспечения того, чтобы дистанция между местоположением на кривой 36 остановленной в нормальном режиме последующей кабины 12 и местоположением на кривой 34 экстренно остановленной опережающей кабины 14 всегда поддерживалось по меньшей мере равным пороговой дистанции dthresh. Например, в точке, соответствующей примерно 12,5 с, местоположение 38 (соответствующее приблизительно шестнадцатому этажу) остановленной в нормальном режиме торможения последующей кабины 12 находится на заданной пороговой дистанции dthresh от местоположения 40 остановленной в режиме максимального замедления опережающей кабины 14 (соответствующего приблизительно семнадцатому этажу).
Настоящее изобретение относится к поддержанию разделительной дистанции между опережающей и последующей кабинами, двигающимися в шахте лифта в одном направлении. Могут непрерывно (или периодически) определяться кратчайший тормозной путь опережающей кабины и нормальный тормозной путь последующей кабины. Расстояние между кабинами регулируется так, что в любой момент времени разность между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины была бы большей или равной пороговой дистанции. За счет регулирования дистанции между кабинами, движущимися в одном направлении, удается избежать столкновения кабин даже при попадании опережающей кабины в аварийную ситуацию. Кроме того, если опережающая кабина вынуждена сделать внезапную, аварийную остановку, последующая кабина может остановиться при нормальных параметрах замедления, что минимизирует влияние на качество движения последующей кабины. В то же время за счет обеспечения возможности последующей кабине 12 двигаться как можно ближе за опережающей кабиной 14 при одновременном соблюдении дистанции так, что последующая кабина 12 всегда может остановиться в нормальном режиме торможения, улучшаются параметры диспетчеризации лифтовой системы 10 таким образом, что учитывается безопасность и качество движения.
Предшествующее рассмотрение предназначено для иллюстрации настоящего изобретения и не должно рассматриваться как ограничение прилагаемой формулы изобретения каким-нибудь конкретным вариантом или группой вариантов осуществления. Поэтому, хотя настоящее изобретение описано в частных деталях со ссылкой на конкретные иллюстративные варианты его осуществления, должно быть понятно, что в него могут быть внесены многочисленные изменения и модификации без выхода за расширенные и предусмотренные рамки изобретения, установленные нижеследующей формулой изобретения.
Соответственно описание и чертежи должны рассматриваться как иллюстративные и не предназначенные для ограничения прилагаемой формулы изобретения. В свете приведенного выше описания настоящего изобретения специалист в данной области должен понимать, что могут быть другие варианты осуществления и модификации, не выходящие за рамки и сущность настоящего изобретения. Соответственно все модификации, доступные специалисту в данной области из настоящего описания в объеме настоящего изобретения, должны быть включены как дополнительные варианты осуществления изобретения. Объем изобретения должен быть определен так, как приведено в нижеследующей формуле изобретения.
Группа изобретений относится к лифтовым системам. В способе определяют кратчайший тормозной путь опережающей кабины и нормальный тормозной путь последующей кабины. Далее регулируют дистанцию при разности между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины большей или равной пороговой дистанции. При регулировании до начала движения кабин задерживают начало движения последующей кабины до достижения между опережающей и последующей кабинами расстояния, равного по меньшей мере разделительной дистанции. При задержке начала движения последующей кабины определяют запланированное время 0≤T≤Tt движения, местоположение θt и нормальный тормозной путь πnst последующей кабины, запланированное время 0≤T≤T1 движения, местоположение θ1 и кратчайший тормозной путь πss1 опережающей кабины. Проверяют выполнение условия: |(θ1(T+Trun)+πss1(T+Trun))-(θt(T)+πnst(T)|≥dthresh, где 0≤T≤min {Tt, Т1-Тrun}, где Тrun - фактическое время движения опережающей кабины, dthresh - пороговая дистанция, a 0≤Trun≤T1. Лифтовая система содержит шахту лифта, первую опережающую и вторую последующую кабины лифта, расположенные в шахте лифта, и контроллер для реализации указанного способа. Достигается повышение безопасности и качества движения лифтовых кабин, двигающихся в шахте лифта в одном направлении. 2 н. и 13. з.п. ф-лы, 2 ил.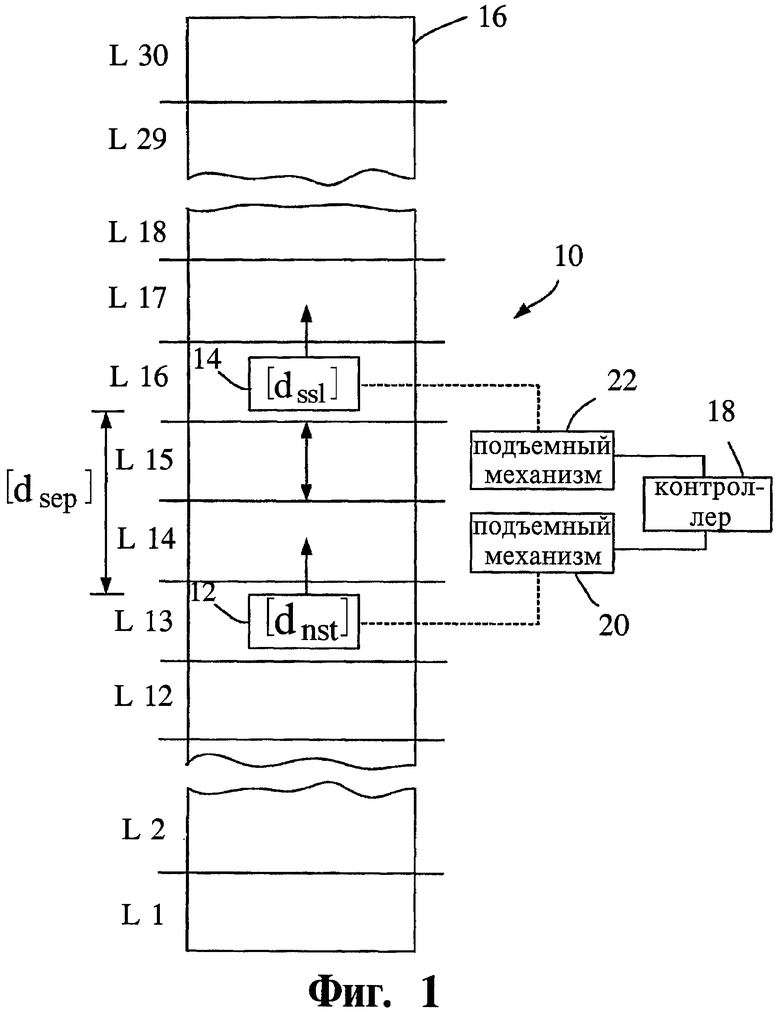
1. Способ поддержания разделительной дистанции в многокабинной лифтовой шахте между опережающей и последующей кабинами лифта, перемещающимися в одном направлении в шахте лифта, характеризующийся определением кратчайшего тормозного пути опережающей кабины и нормального тормозного пути последующей кабины и последующим регулированием дистанции при разности между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины большей или равной пороговой дистанции, при этом при регулировании до начала движения кабин задерживают начало движения последующей кабины до достижения между опережающей и последующей кабинами расстояния, равного по меньшей мере разделительной дистанции, отличающийся тем, что при задержке начала движения последующей кабины определяют запланированное время 0≤Т≤Tt движения, местоположение θt и нормальный тормозной путь πnst последующей кабины, запланированное время 0≤T≤T1 движения, местоположение θ1 и кратчайший тормозной путь πss1 опережающей кабины, и проверяют выполнение условия:
|(θ1(T+Trun)+πss1(T+Trun))-(θt(T)+πnst(T)|≥dthresh,
где 0≤T≤min {Tt, T1-Тrun}, где Тrun - фактическое время движения опережающей кабины, dthresh - пороговая дистанция, а 0≤Тrun≤Т1.
2. Способ по п.1, отличающийся тем, что определение тормозных путей и регулирование дистанции при движении опережающей и/или последующей кабин в шахте лифта многократно повторяют.
3. Способ по п.1, отличающийся тем, что при регулировании останавливают последующую кабину или снижают ее скорость при разности между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины меньшей пороговой дистанции.
4. Способ по п.1, отличающийся тем, что при определении кратчайшего тормозного пути опережающей кабины измеряют по меньшей мере один параметр движения опережающей кабины, выбранный из группы, включающей скорость, направление, ускорение, загрузку и скорость изменения ускорения опережающей кабины лифта.
5. Способ по п.4, отличающийся тем, что определяют тормозной путь опережающей кабины при максимальном замедлении посредством по меньшей мере одного измеренного параметра движения.
6. Способ по п.1, отличающийся тем, что кратчайшим тормозным путем опережающей кабины является аварийный тормозной путь.
7. Способ по п.1, отличающийся тем, что при определении нормального тормозного пути последующей кабины измеряют по меньшей мере один параметр ее движения, выбранный из группы, включающей скорость, направление, ускорение, загрузку и изменение ускорения.
8. Способ по п.7, отличающийся тем, что определяют тормозной путь при регулируемой интенсивности торможения посредством по меньшей мере одного измеренного параметра движения последующей кабины.
9. Способ по п.1, отличающийся тем, что пороговая дистанция составляет по меньшей мере приблизительно одну высоту этажа.
10. Лифтовая система, включающая шахту лифта, первую опережающую и вторую последующую кабины лифта, расположенные в шахте лифта, и контроллер, выполненный с возможностью приведения в движение первой и второй кабин в одном направлении, поддержания разделительной дистанции между указанными кабинами при разности между нормальным тормозным путем последующей кабины и кратчайшим тормозным путем опережающей кабины большей или равной пороговой дистанции и задержки начала движения последующей кабины до достижения между опережающей кабиной и последующей кабиной расстояния, по меньшей мере, равного разделительной дистанции при движении указанных кабин в одном направлении в шахте лифта, отличающаяся тем, что контролер выполнен с возможностью задержки начала движения последующей кабины лифта посредством определения запланированных времени 0≤T≤Tt движения последующей кабины, местоположения θ1 и нормального тормозного пути πnst последующей кабины, времени 0≤T≤T1 движения опережающей кабины, местоположения θ1 и кратчайшего тормозного пути πss1 последующей кабины и проверки выполнения условия:
|(θ1(T+Trun)+πss1(T+Trun))-(θt(T)+πnst(T)|≥dthresh,
где 0≤T≤min {Tt, T1-Тrun}, Trun - фактическое время движения опережающей кабины, dthresh - пороговая дистанция, a 0≤Trun≤T1.
11. Система по п.10, отличающаяся тем, что нормальный тормозной путь последующей кабины является функцией от по меньшей мере одного ее параметра движения, выбранного из группы, включающей скорость, направление, ускорение, загрузку и изменение ускорения последующей кабины при нормальных условиях работы.
12. Система по п.10, отличающаяся тем, что кратчайший тормозной путь опережающей кабины является функцией от по меньшей мере одного ее параметра движения, выбранного из группы, включающей скорость, направление, ускорение, загрузку и изменение ускорения опережающей кабины при аварийных условиях работы.
13. Система по п.10, отличающаяся тем, что кратчайшим тормозным путем является аварийный тормозной путь.
14. Система по п.10, отличающаяся тем, что пороговая дистанция составляет по меньшей мере приблизительно высоту одного этажа.
15. Система по п.10, отличающаяся тем, что контроллер выполнен с возможностью снижения скорости последующей кабины или ее остановки при разности между нормальным тормозным путем последующей кабины лифта и кратчайшим тормозным путем опережающей кабины лифта меньшим пороговой дистанции.
| WO 2004043842 A1, 27.05.2004 | |||
| Устройство для измерения градиента магнитного поля | 1976 |
|
SU769469A1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛИФТА | 1996 |
|
RU2179143C2 |

