Изобретение относится к области радиолокации, в частности к обнаружению, определению координат и сопровождению малозаметного низколетящего над морской поверхностью (МП) со сверхзвуковой скоростью объекта.
Изобретение позволяет сопровождать даже полностью невидимые объекты, летящие вблизи МП и создающие за собой возмущения воздушного пространства (псевдозвуковую волну). На момент обнаружения предполагается равномерное прямолинейное перемещение объекта над МП без изменения высоты полета со скоростью, превышающей 1,2 Маха.
Способ может быть осуществлен расположенным на судне автономным радиолокатором в пределах радиогоризонта, а также с применением многопозиционной радиолокации.
В [1] предложен способ обнаружения объекта по столбу газо-водяного следа на морской поверхности. Предложение строится на превышении столба газо-водяного следа эффективной поверхности рассеивания объекта. Подъем водных масс встречается только тогда, когда истекающая из двигателя объекта газовая струя задевает или касается водной поверхности, что на практике возможно при маневре набора высоты («горка»).
Аналогом предложенного изобретения можно назвать способ лазерной локации [2], использующий дополнительные к основному отражению от объекта отражения от водной поверхности для уточнения скорости объекта и определения высоты полета объекта. Однако этот способ использует немодулированное излучение одночастотного лазера непрерывного действия, что в радиолокации ведет к неэффективному использованию потенциала РЛС.
Способ определения координат объекта основан на наличии за объектом следа - протяженной аномалии МП, имеющей радиолокационный контраст относительно остальной МП.
При обнаружении следа по радиолокационной отметке фронта следа определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр. Фронт следа перемещается с такой же скоростью, что и объект. По перемещению радиолокационной отметки фронта следа определяется скорость движения объекта.
Курс движения объекта Коб определяется по пространственной ориентации следа, а не по направлению перемещения фронта следа, что повышает точность определения курса при использовании радиолокатора кругового обзора.
По пеленгу на фронт следа Пфр и курсу объекта Коб определяется курсовой угол с фронта следа на радиолокатор - βфр:
При радиолокационном зондировании МП методом стробирования снимаются значения измеренной ширины следа Визм, потом значения усредняются, и рассчитывается значение ширины следа Врасч
 ;
;
где  - усредненная измеренная ширина следа.
- усредненная измеренная ширина следа.
Объект будет находиться относительно фронта следа в направлении перемещения фронта впереди на расстоянии X (см. схему):
 ;
;
где 12,7° - угол падения звуковой волны на МП, при котором звуковая волна отражается от границы сред (водной поверхности), в результате чего передача энергии значительно уменьшается [3];
 - средний уклон крупных волн МП, для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности [4];
- средний уклон крупных волн МП, для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности [4];
Vоб - скорости объекта;
νзв - скорость звука в пространстве между объектом и МП, которая может быть рассчитана  (T - температура воздушного пространства между объектом и МП, K);
(T - температура воздушного пространства между объектом и МП, K);
ΔX - расстояние между объектом и фронтом следа, образованное инерцией реакции МП на воздействие псевдозвуковой волны:
ΔXфр=Δtфр·Vоб.
Δtфр - время реакции МП на воздействие псевдозвуковой волны:
 ,
,
где Vпв - скорость распространения поверхностных волн, примерно равна трети скорости установившегося ветра;
lp - радиус пространственной корреляции мелкоструктурных ветровых волн (ряби), для которых выполняется условие резонансного рассеяния электромагнитных волн длиной λ под углом скольжения ψ (условие Брегга):
 .
.
Учет времени реакции МП на псевдозвуковое воздействие приводит к преобразованию формулы расчета X к виду
 .
.
Решение задачи расчета координат объекта является решением геометрической задачи, представленной на схеме. По теореме косинусов из треугольника со сторонами Доб, Дфр, X дальность до объекта:
 .
.
По теореме синусов из треугольника со сторонами Доб, Дфр, X разница пеленгов на фронт следа и на объект
 .
.
Из уравнения свойств углов
βоб=βфр+θ.
Тогда курсовой угол на радиолокатор относительно объекта выражается через уже известные величины
 .
.
Пеленг на объект
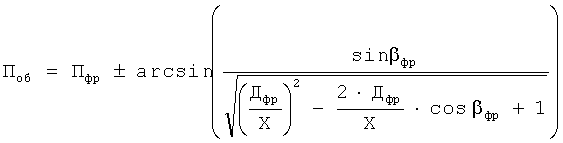 .
.
Знак ± означает, что в зависимости от места расположения радиолокатора относительно направления движения объекта пеленг на объект будет больше или меньше пеленга на фронт следа. Если радиолокатор расположен по правому борту относительно направления движения объекта, то пеленг на объект будет больше пеленга на фронт следа. Если радиолокатор расположен по левому борту относительно направления движения объекта, то пеленг на объект будет меньше пеленга на фронт следа.
Для упрощения процесса вычисления вводится промежуточное значение a:
 .
.
Тогда дальность до объекта вычисляется по формуле
 ;
;
а пеленг на объект вычисляется по формуле
Осуществление:
До обнаружения следа сверхзвукового низколетящего объекта производится определение среднего уклона крупных волн МП -  . Для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности.
. Для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности.
Вычисляется скорость распространения звука в воздушном пространстве между объектом и МП
 ,
,
где T - температура воздушного пространства между объектом и МП, K.
Значение скорости распространения поверхностных волн Vпв определяется приближенно как треть скорости установившегося ветра.
После обнаружения радиолокатором следа объекта определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр, по местоположению фронта следа и пространственной ориентации следа определяется направление движения (курс) объекта Коб. По пеленгу на фронт следа Пфр и курсу объекта Коб определяется курсовой угол с фронта следа на радиолокатор - βфр:
Из данных радиолокационного зондирования МП методом стробирования снимаются значения измеренной ширины следа Визм, потом значения усредняются, и рассчитывается значение ширины следа Врасч
 .
.
По перемещению радиолокационной отметки фронта следа определяется скорость движения объекта.
По известной длине электромагнитной волны λ, излучаемой радиолокатором, и углу скольжения ψ при облучении МП радиолокатором вычисляется промежуточное значение а:
 .
.
Дальность до объекта вычисляется по формуле
 .
.
Пеленг на объект вычисляется по формуле
Источники информации
1. Гребенюк И.И., Стабровский В.Н. Обнаружение сверхзвуковых низколетящих воздушных целей по газоводяному следу // Международная НТК по проблемам радиолокации: Тез. докл. - Санкт-Петербург, ВМИРЭ, 2003. - Т.6. - С.204-210.
2. Меньших О.Ф. Способ локации. Патент РФ №2296350, 2007.
3. Долгих В.Н., Казанцев Т.П. Прикладная гидрофизика. Часть 1. Гидроакустика: учебник. - Владивосток, ТОВМИ им. С.О.Макарова, 2005. - 488 с.: ил.
4. Ушаков И.Е., Шишкин И.Ф. Радиолокационное зондирование морской поверхности. - М.: РИЦ «Татьянин день», 1997. - 264 с.: ил.
Изобретение относится к области радиолокации, в частности к обнаружению, определению координат и сопровождению сверхзвукового малозаметного низколетящего над морской поверхностью (МП) объекта. Техническим результатом изобретения является расширение функциональных возможностей. Способ может быть осуществлен расположенным на судне автономным радиолокатором при полном отсутствии радиолокационного отражения от объекта, но при наличии следа - аномалии МП (АМП). До обнаружения АМП производится определение среднего уклона крупных волн МП -  , скорости распространения поверхностных (ветровых) волн МП - Vпв, скорости распространения звуковых волн над МП - νзв. После обнаружения следа радиолокационным способом определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр, производится измерение ширины следа способом радиолокационного стробирования по дальности -
, скорости распространения поверхностных (ветровых) волн МП - Vпв, скорости распространения звуковых волн над МП - νзв. После обнаружения следа радиолокационным способом определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр, производится измерение ширины следа способом радиолокационного стробирования по дальности -  . Курс движения объекта Коб определяется пространственной ориентацией следа. Скорость объекта Vоб определяется по перемещению фронта следа. По пеленгу на фронт следа Пфр и курсу объекта Коб определяется курсовой угол с фронта следа на радиолокатор - βфр. По известной длине излучаемой радиолокатором электромагнитной волны и углу скольжения при облучении МП радиолокатором (ψ) вычисляется дальность до объекта и пеленг. 1 ил.
. Курс движения объекта Коб определяется пространственной ориентацией следа. Скорость объекта Vоб определяется по перемещению фронта следа. По пеленгу на фронт следа Пфр и курсу объекта Коб определяется курсовой угол с фронта следа на радиолокатор - βфр. По известной длине излучаемой радиолокатором электромагнитной волны и углу скольжения при облучении МП радиолокатором (ψ) вычисляется дальность до объекта и пеленг. 1 ил.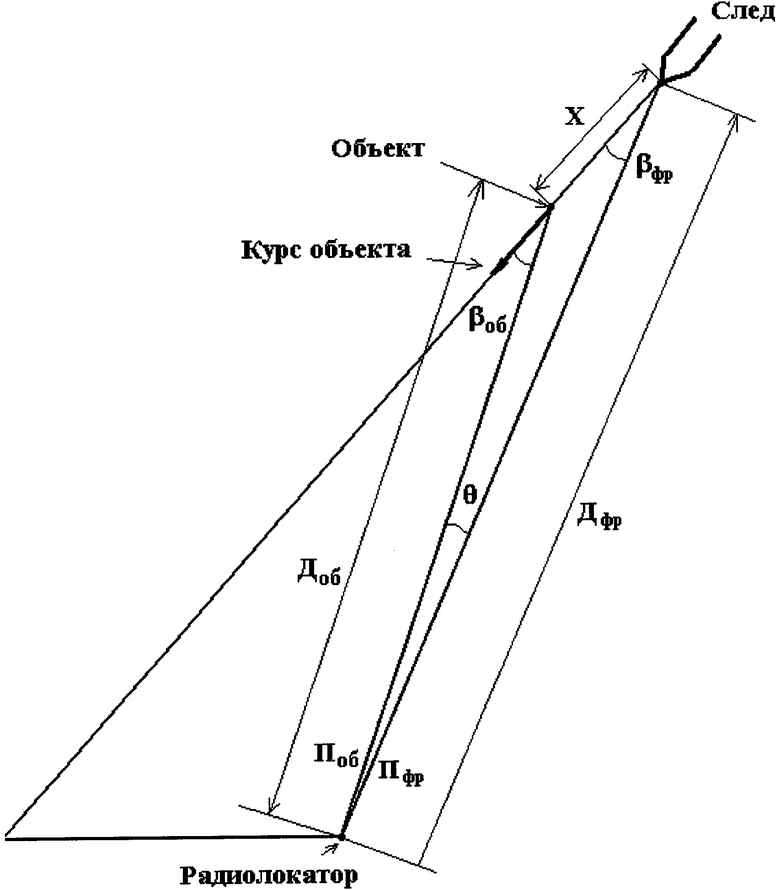
Способ определения координат сверхзвукового низколетящего над морской поверхностью (МП) объекта по радиолокационно наблюдаемому следу на МП, способный осуществляться как при наличии, так и при отсутствии радиолокационного отражения от самого объекта; производимый по аномалии морской поверхности (АМП), скорость перемещения фронта и другие признаки которой позволяют классифицировать ее как след низколетящего над МП объекта; осуществляемый расположенным на судне автономным радиолокатором в пределах радиогоризонта, отличающийся тем, что до обнаружения следа (АМП) производится определение среднего уклона крупных волн МП, скорости распространения поверхностных (ветровых) волн МП, скорости распространения звуковых волн над МП; после обнаружения следа (АМП) радиолокационным способом определяются дальность до фронта следа и пеленг на фронт следа, производится измерение ширины следа способом радиолокационного стробирования по дальности; курс движения объекта определяется пространственной ориентацией следа; курсовой угол с фронта следа на радиолокатор вычисляется в случае, если пеленг с радиолокатора на фронт следа больше курса объекта, как модуль разности, где уменьшаемое - пеленг с радиолокатора на фронт следа, вычитаемое - сумма курса фронта следа и 180°, а в противном случае как модуль разности, где уменьшаемое - сумма пеленга с радиолокатора на фронт следа и 180°, вычитаемое - курс фронта следа; дальность до объекта вычисляется как корень квадратный суммы трех слагаемых, первое слагаемое - квадрат дальности до фронта следа, второе слагаемое - отрицательное удвоенное произведение дальности до фронта следа, скорости объекта, косинуса курсового угла с фронта следа на радиолокатор и суммы двух отношений, в первом из которых произведение усредненной измеренной ширины следа, косинуса курсового угла с фронта следа на радиолокатор, котангенса суммы 12,7° и среднего уклона крупных волн МП делится на удвоенную скорость звука над МП, во втором - произведение корня квадратного из 2 и длины волны радиолокатора делится на произведение величины π, скорости распространения поверхностных волн и косинуса угла скольжения при облучении МП радиолокатором, третье слагаемое - произведение квадрата скорости объекта на квадрат суммы двух отношений, в первом из которых произведение усредненной измеренной ширины следа, косинуса курсового угла с фронта следа на радиолокатор, котангенса суммы 12,7° и среднего уклона крупных волн МП делится на удвоенную скорость звука над МП, во втором - произведение корня квадратного из 2 и длины волны радиолокатора делится на произведение величины π, скорости распространения поверхностных волн и косинуса угла скольжения при облучении МП радиолокатором; пеленг на объект вычисляется как сумма (в случае при превышении пеленга на фронт следа над курсом объекта отрицательного значения разности, где уменьшаемое - пеленг на фронт следа, вычитаемое - сумма курса объекта и 180°, или в случае при превышении курса объекта над пеленгом на фронт следа отрицательного значения разности, где уменьшаемое - сумма пеленга на фронт следа и 180°, вычитаемое - курс объекта, пеленг на объект вычисляется как разность) пеленга на фронт следа и арксинуса отношения, где числитель - синус курсового угла с фронта следа на радиолокатор, знаменатель - корень квадратный суммы трех слагаемых, первое слагаемое - отношение квадрата дальности до фронта следа к произведению квадратов скорости объекта и суммы двух отношений, в первом из которых произведение усредненной измеренной ширины следа, косинуса курсового угла с фронта следа на радиолокатор, котангенса суммы 12,7° и среднего уклона крупных волн МП делится на удвоенную скорость звука над МП, во втором - произведение корня квадратного из 2 и длины волны радиолокатора делится на произведение величины π, скорости распространения поверхностных волн и косинуса угла скольжения при облучении МП радиолокатором, второе слагаемое - отрицательное отношение дальности до фронта следа к произведению скорости объекта и суммы двух отношений, в первом из которых произведение усредненной измеренной ширины следа и котангенса суммы 12,7° и среднего уклона крупных волн МП делится на учетверенную скорость звука над МП, во втором - длина волны радиолокатора делится на произведение корня квадратного из 2, величины π, скорости распространения поверхностных волн, косинуса курсового угла с фронта следа на радиолокатор и косинуса угла скольжения при облучении МП радиолокатором, третье слагаемое - единица.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ ПО ДАННЫМ ОТ АВТОНОМНЫХ РАДИОЛОКАТОРОВ | 2003 |
|
RU2241240C1 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| КОРАБЕЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ И АНТЕННОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2003 |
|
RU2254593C1 |
| US 5331326 А, 19.07.1994 | |||
| US 2008158058 А1, 03.07.2008. | |||

