Изобретение относится к области авиационного вооружения, в частности к способам наведения управляемых ракет класса «воздух-воздух» с активными радиолокационными головками самонаведения для поражения целей - постановщиков активных когерентных помех, преимущественно самолетов - помехопостановщиков.
Известны различные способы поражения целей путем наведения на них управляемых ракет и системы наведения ракет, их реализующие, например описанные в работах [1, 2, 3]. В настоящее время основным из приведенных выше способов является взятое в качестве прототипа активное радиолокационное самонаведение ракет [1], отличительной особенностью которого является то, что и источник зондирующего сигнала и приемник отраженного от цели сигнала находятся на борту управляемой ракеты. Такое построение обеспечивает выполнение основного требования к современным системам управления авиационного вооружения - автономность ракеты в процессе наведения, т.е. реализацию принципа «пустил-забыл».
При реализации радиолокационного самонаведения направление на цель, информация о котором необходима для формирования сигналов управления ракетой, определяется угловым дискриминатором системы наведения. Однако, поскольку радиолокационные угломерные системы определяют направление на источник излучения (в данном случае на цель, как источник отраженного сигнала) как положение нормали к фазовому фронту радиолокационной волны, характеризующей положение некоторого эффективного центра отражения [4], то искажения фронта волны (по отношению к сферическому) приводят к ошибкам измерения, в том числе аномальным. Такие искажения фронта и соответствующие им ошибки измерения могут быть как естественного происхождения вследствие особенностей характера отражения сигнала, так и иметь искусственно организованный характер. Как показано в [4], одновременное излучение из нескольких источников на одной частоте радиолокатор воспринимает как излучение из некоторого эффективного центра, местоположение которого в общем случае не совпадает ни с одним из реальных источников.
Организованные помехи, приводящие к искажению фазового фронта и формируемые целью - постановщиком помех путем излучения из нескольких точек (минимум из двух) взаимосвязанных по амплитуде и фазе сигналов, принято называть когерентными. Воздействие таких помех на радиолокационную систему наведения приводит к недопустимым промахам и уменьшению вероятности поражения цели вплоть до нуля.
В частности, если амплитуды сигналов двух помеховых излучателей E1 и E2 примерно равны, а фазовый сдвиг в точке приема близок к 180°, эффективный центр отражения будет лежать вне базы L (где L - расстояние между излучателями, устанавливаемыми на концах крыльев), т.е. за пределами контура цели. Поскольку наведение по измерениям радиолокатора будет осуществляться на некоторую нематериальную точку эффективного центра отражения, то реальная цель - постановщик помехи не будет поражена. Таким образом, при правильном подборе помехостановщиком амплитудных и фазовых соотношений помеховых сигналов эффективность когерентной помехи весьма высока и вероятность срыва наведения на цель стремится к 1, т.е. вероятность поражения цели стремится к 0.
Искажения фазового фронта радиоволн имеют место и при отражении от сложных целей, имеющих многоточечный характер отражения, и носят название «угловой шум» [5]. Однако угловой шум имеет случайный характер, а аномальные ошибки, им обусловленные, при сопровождении типичных целей приемлемы с учетом фильтрующих свойств контура наведения. Кроме того, разработано достаточно большое количество способов дополнительного снижения влияния углового шума, например в [6], [7]. Однако если искажения фазового фронта радиоволн имеют не случайный, а постоянный целенаправленный характер, как в случае применения когерентных полей, упомянутые выше способы и аналогичные им неэффективны, и либо не защищают от перенацеливания на мнимый источник, либо приводят к размыканию контура наведения, что приводит в итоге к одному результату - не поражению цели.
Однако возможности постановки когерентных помех имеют принципиальные физические ограничения, которые могут быть использованы для защиты активных радиолокационных систем и систем наведения ракет с активными радиолокационными системами. Дело в том, что область пространства, в которой выполняются необходимые для возникновения искажений фазового фронта фазовые отношения сигналов помеховых излучателей, в силу разности хода радиоволн из разных точек сравнительно невелика, и практически составляет порядка 0,001 рад по углу (или единицы, или несколько десятков метров в зависимости от дальности до цели по линейным координатам).
И если современные средства радиопротиводействия в состоянии создать необходимые соотношения амплитуд и фаз в месте расположения активной радиолокационной головки самонаведения (демаскирующей свое местоположение своим излучением), то уже на небольшом расстоянии от этого места необходимые соотношения не выполняются, и искажения фронта столь незначительны, что не представляют угрозы. По этой причине когерентные помехи неэффективны против многопозиционных, в частности бистатических (т.е. двухпозиционных) радиолокационных систем, когда передатчик зондирующего сигнала находится в одном месте, а приемник - в другом, и между ними существует значительный бистатический угол.
Это свойство устойчивости к когерентным помехам при разнесенных по пространству передаче и приеме, присущее многопозиционным системам, может быть реализовано в ракетных системах с активным радиолокационным наведением ракет за счет специальной организации процесса наведения двух ракет и их взаимодействия между собой.
Настоящее изобретение направлено на решение задачи повышения эффективности поражения цели-постановщика когерентных помех путем пуска и наведения ракет с активным радиолокационным самонаведением.
Поставленная задача решается за счет того, что для поражения цели-постановщика когерентных помех путем пуска и наведения ракет с активным радиолокационным самонаведением, включающим излучение зондирующего сигнала и прием отраженного от цели сигнала, на цель осуществляют наведение одновременно двух ракет, а излучение зондирующего сигнала и прием отраженного от цели сигнала перераспределяют между ракетами попеременно, при этом перед пуском ракет интервалы излучения зондирующих сигналов и прием отраженных сигналов синхронизируют таким образом, чтобы интервалам излучения сигнала одной ракеты соответствовали интервалы приема отраженного от цели сигнала другой ракеты.
Кроме того, переключение интервалов излучения сигнала и приема отраженного сигнала осуществляют с частотой, превышающей ширину полосы пропускания системы наведения. Частоту переключения интервалов излучения и приема задают переменной. При этом наведение ракет осуществляют по максимально расходящимся траекториям типа «клещи».
Предложенный способ позволяет сохранить такое преимущество активной радиолокационной системы как автономность, но обеспечивает условия разнесения в пространстве передачи и приема сигнала, что делает способ устойчивым к воздействию помехи, так та ракета, которая излучает сигнал в каждый момент времени и, соответственно, потенциально подвержена действию помехи, приема не производит, а наводится на основе измерений, выполненных в моменты времени, когда она принимала сигналы, порожденные излучением другой ракеты. Потом функции ракеты меняются, и, таким образом, в каждый момент времени система аналогична двухпозиционной системе наведения с той лишь разницей, что приемник и передатчик периодически меняются местами.
Для обеспечения непрерывности формирования сигналов управления ракетой предложено переключение интервалов излучения сигнала и его приема осуществлять с частотой, превышающей ширину полосы пропускания системы наведения.
При этом для создания дополнительных трудностей в создании ответной помехи частота переключения интервалов может задаваться переменной.
Предложение осуществлять наведение ракет по максимально расходящимся на начальном и среднем участках траекториям типа «клещи" направлено на то, чтобы на большей части траекторий полета ракеты были максимально удалены одна от другой и не входили в область пространства, в которой действенна когерентная помеха.
Сущность предлагаемого способа поясняется схемами, представленными на Фиг.1 и Фиг.2.
Фиг.1 иллюстрирует соответствие интервала излучения зондирующего импульса одной ракеты интервалу приема отраженного сигнала другой ракеты. На Фиг.2 представлена обобщенная блок-схема аппаратуры ракет, связи с носителем, между собой и с целью. Для реализации способа требуется дополнительное включение в состав аппаратуры ракет специальных коммутаторов, а в состав аппаратуры носителя синхронизатора для синхронизации работы указанных коммутаторов в соответствии с их циклограммой.
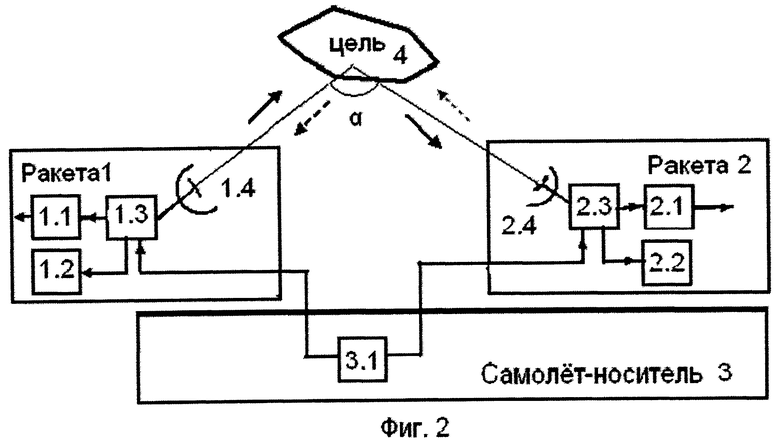
Так, в состав аппаратуры ракеты 1 входят приемник радиолокационных сигналов 1.1, выходные сигналы углового дискриминатора которого в виде оценок координат цели поступают в систему управления ракетой (на фиг.2 она не показана), передатчик 1.2, управляемый коммутатор 1.3 и приемо-передающая антенна 1.4, подключаемая через коммутатор в зависимости от его состояния к выходу передатчика 1.2 или ко входу приемника 1.1. В состав ракеты 2 аналогичным образом входят приемник 2.1, передатчик 2.2, коммутатор 2.3 и приемопередающая антенна 2.4. В состав аппаратуры самолета-носителя 3 дополнительно включен синхронизатор 3.1, выходы которого до пуска ракет подключаются к синхровходам управляемых коммутаторов 1.3 и 2.3, причем сигналы на выходах синхронизатора, подключенных к каждому из коммутаторов, должны быть противофазны.
После обнаружения цели 4 самолетом-носителем 3 вырабатывается и передается на ракеты 1, 2 циклограмма переключений режимов работы прием-передача активных радиолокационных головок самонаведения обеих ракет, их коммутаторы 1.3 и 2.3 синхронизируются, например, путем подачи с носителя импульсного синхросигнала в противофазе на коммутаторы каждой из двух ракет. После пуска ракет циклограмма переключения запоминается и реализуется без дополнительной внешней синхронизации. Кроме того, в вычислители ракет (на фиг.2 не показаны) вводится программа по разведению ракет в стороны на начальном и среднем участках траектории для организации в дальнейшем наведения на цель типа «клещи».
После пуска и захвата цели - постановщика помех активными радиолокационными головками самонаведения обеих ракет для каждой из них попеременно создаются условия для определения координат цели и наведения на нее для ее поражения, поскольку сигнал, излученный одной ракетой и отраженный от цели, принимается другой ракетой. При этом благодаря тому, что частота переключения интервалов приема и передачи сигналов на каждой из ракет производится с частотой, превышающей ширину полосы пропускания системы наведения, формирование сигналов управления ракетой осуществляется так же, как и при непрерывном поступлении информации.
В итоге на базе двух ракет с активным радиолокационным самонаведением реализуется двухпозиционная радиолокационная система с максимально возможным (благодаря применению траекторий типа «клещи») по условиям наведения бистатическим углом, не подверженная воздействию когерентных помех.
Все сказанное выше относительно способа применения авиационных управляемых ракет класса «воздух-воздух» с активными радиолокационными головками самонаведения для поражения целей-постановщиков когерентных помех в равной степени применимо и для зенитных управляемых ракет с активными радиолокационными головками самонаведения с той лишь разницей, что синхронизатор включается в состав аппаратуры зенитно-ракетного комплекса.
Источники информации
1. «Основы радиоуправления» Под ред. В.А.Вейцеля и В.Н.Типугина, М.: Сов. Радио, 1973 г, стр.303.
2. М.В.Максимов, Г.И.Горгонов «Авиационные системы радиоуправления» авторы, издание ВВИА им. Проф. Н.Е.Жуковского, 1973 г., стр.54.
3. М.В.Максимов, Г.И.Горгонов «Радиоэлектронные системы самонаведения», М.: Радио и связь, 1982 г., стр.222-223.
4. «Теоретические основы радиолокации» Под ред. Я.Д.Ширмана, М.: Сов. радио, 1970 г., стр.31.
5. «Справочник по радиолокации» под. ред. М.Сколника, М.: Сов радио, 1976 г., том 1, стр.405-412.
6. Джавадов Г.Г. «Компенсация ошибок углометрии, вызванных искажениями фронта волн», «Радиотехника» №1, 1986 г.
7. Greene М., Stensby J., Radar target pointing error reduction using extended Kalman filtering. JEEE Trans., vol. AES-23, №2, 1987, pp 273-278.
Использование: область авиационного вооружения, в частности в способах наведения управляемых ракет класса «воздух-воздух» с активными радиолокационными головками самонаведения для поражения целей - постановщиков активных когерентных помех, преимущественно самолетов - помехопостановщиков. Сущность: способ поражения цели-постановщика когерентных помех путем пуска и наведения ракет с активным радиолокационным самонаведением, заключающийся в излучении зондирующего сигнала и приеме отраженного от цели сигнала, при этом на цель осуществляют наведение одновременно двух ракет, а излучение зондирующего сигнала и прием отраженного от цели сигнала перераспределяют между ракетами попеременно, перед пуском ракет интервалы излучения зондирующих сигналов и прием отраженных сигналов синхронизируют таким образом, чтобы интервалам излучения сигнала одной ракеты соответствовали интервалы приема отраженного от цели сигнала другой ракеты. Переключение интервалов излучения сигнала и приема отраженного сигнала осуществляют с частотой, превышающей ширину полосы пропускания системы наведения, а частоту переключения интервалов излучения и приема задают преимущественно переменной. При этом наведение ракет на цель осуществляют по максимально расходящимся траекториям типа «клещи». 3 з.п. ф-лы, 2 ил.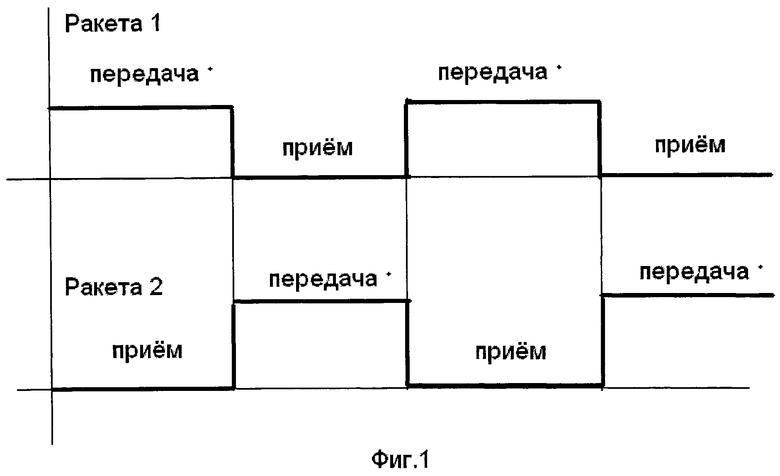
1. Способ поражения цели-постановщика когерентных помех ракетами с активными радиолокационными головками самонаведения, включающий излучение зондирующего сигнала и прием отраженного от цели сигнала, отличающийся тем, что на цель осуществляют наведение одновременно двух ракет, излучение зондирующего сигнала и прием отраженного от цели сигнала перераспределяют между ракетами попеременно, при этом перед пуском ракет интервалы излучения зондирующих сигналов и прием отраженных сигналов синхронизируют таким образом, чтобы интервалам излучения сигнала одной ракеты соответствовали интервалы приема отраженного от цели сигнала другой ракеты.
2. Способ поражения по п.1, отличающийся тем, что переключение интервалов излучения сигнала и приема отраженного сигнала осуществляют с частотой, превышающей ширину полосы пропускания системы наведения.
3. Способ поражения по п.2, отличающийся тем, что частоту переключения интервалов излучения и приема задают переменной.
4. Способ поражения по п.1, отличающийся тем, что наведение ракет осуществляют по максимально расходящимся траекториям типа «клещи».
| Марковский Виктор и Перов Константин | |||
| Советские авиационные ракеты «Воздух-воздух» | |||
| - М.: Издательский центр «Экспринт», 2005, весь документ, особенно с.33-37 | |||
| The Russian Philosophy of Beyond Visual Range Air Combat | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

