Изобретение относится к области авиационного вооружения, в частности к способам наведения управляемых ракет класса «воздух-воздух» с активными радиолокационными головками самонаведения для поражения целей-постановщиков активных когерентных помех, преимущественно самолетов.
Анализ известных технических решений, направленных на решение задачи обеспечения повышения вероятности поражения воздушных целей, например, приведенных в работах: М.В. Максимов, Г.И. Горгонов «Авиационные системы радиоуправления», издание ВВИА им. проф. Н.Е. Жуковского, 1973 г., стр. 54 и М.В. Максимов, Г.И. Горгонов «Радиоэлектронные системы самонаведения», М.: Радио и связь, 1982 г., стр. 222-223, показывают, что данные решения и устройства, созданные на их основе, обеспечивают требуемую для наведения управляемых ракет с высокой вероятностью поражения точность сопровождения целей в беспомеховых ситуациях и в условиях действия большинства известных естественных и организованных помех. В то же время не обеспечивается их защищенность от действия такого вида помех как когерентные. Это обусловлено механизмом воздействия когерентных помех на угловые дискриминаторы систем наведения. Известно, что, поскольку радиолокационные угломерные системы определяют направление на источник излучения (в данном случае на цель, как источник отраженного сигнала) как положение нормали к фазовому фронту радиолокационной волны, характеризующей положение некоторого эффективного центра отражения, то искажения фронта волны (по отношению к сферическому) приводят к ошибкам измерения, в том числе аномальным. Такие искажения фронта и соответствующие им ошибки измерения могут быть как естественного происхождения, вследствие особенностей характера отражения сигнала, так и могут иметь искусственно организованный характер. Как показано в работе «Теоретические основы радиолокации». Под ред. Я.Д. Ширмана, М.: Сов. радио, 1970 г., стр. 31, одновременное излучение из нескольких источников на одной частоте радиолокатор воспринимает как излучение из некоторого эффективного центра, местоположение которого в общем случае не совпадает ни с одним из реальных источников. Организованные помехи, приводящие к искажению фазового фронта и формируемые целью-постановщиком помех путем излучения из нескольких точек (минимум из двух) взаимосвязанных по амплитуде и фазе сигналов, принято называть когерентными. Воздействие таких помех на радиолокационную систему наведения приводит к недопустимым промахам и уменьшению вероятности поражения цели вплоть до нуля. В частности, если амплитуды сигналов двух помеховых излучателей E1 и Е2 примерно равны, а фазовый сдвиг в точке приема близок к 180°, эффективный центр отражения будет лежать вне базы L (где L - расстояние между излучателями, устанавливаемыми на концах крыльев), т.е. за пределами контура цели. Поскольку наведение по измерениям радиолокатора будет осуществляться в некоторую нематериальную точку эффективного центра отражения, то реальная цель - постановщик помехи не будет поражена. Таким образом, при правильном подборе помехопостановщиком амплитудных и фазовых соотношений помеховых сигналов эффективность когерентной помехи весьма высока и вероятность срыва наведения на цель стремится к 1, т.е. вероятность поражения цели стремится к 0.
Искажения фазового фронта радиоволн имеют место и при отражении от сложных целей, имеющих многоточечный характер отражения, и носят название «угловой шум» [«Справочник по радиолокации». Под ред. М. Сколника, М.: Сов. радио, 1976 г., том 1, стр. 405-412]. Однако угловой шум имеет случайный характер, а аномальные ошибки, им обусловленные, при сопровождении типичных целей приемлемы с учетом фильтрующих свойств контура наведения. Однако, если искажения фазового фронта радиоволн имеют не случайный, а постоянный целенаправленный характер, как в случае применения когерентных полей, упомянутые выше способы и аналогичные им неэффективны и либо не защищают от перенацеливания на мнимый источник, либо приводят к размыканию контура наведения, что приводит в итоге к одному результату - непоражению цели.
В качестве аналогов приняты наиболее схожие технические решения, описанные в перечисленных ниже источниках:
- «Основы радиоуправления». Под ред. В.А. Вейцеля и В.Н. Типугина, М.: Сов. Радио, 1973 г, стр. 303. Данное техническое решение обеспечивает выполнение основного требования к современным системам управления авиационным вооружением - автономность ракеты после пуска, т.е. реализацию принципа «пустил и забыл», но не обеспечивает защищенность от действия когерентных помех;
- Патент РФ на изобретение №2468381, кл. G01S 3/72, F41G 7/22, F42B 15/00, 2012 г. «Способ поражения цели-постановщика когерентных помех ракетами с активными радиолокационными головками самонаведения.» Способ заключается в наведении на цель одновременно двух ракет по максимально расходящимся траекториям типа «клещи», каждая из которых излучает зондирующий сигнал на разных частотах и принимает отраженный от цели сигнал соседней ракеты, причем интервалы излучения зондирующих сигналов и приема отраженных сигналов синхронизируют таким образом, чтобы интервалам излучения сигнала одной ракеты соответствовали интервалы приема отраженного от цели сигнала другой ракеты. Данное решение обеспечивает защищенность от действия когерентных помех, но имеет тот недостаток, что из-за дискретного поступления информации в контур углового сопровождения происходит снижение точности сопровождения маневрирующих целей, а соответственно, снижение точности наведения и вероятности поражения цели. Наиболее близким из указанных выше аналогов к разработанному техническому решению является Патент РФ на изобретение №2468381, кл. G01S 3/72, F41G 7/22, F42B 15/00, 2012 г. «Способ поражения цели-постановщика когерентных помех ракетами с активными радиолокационными головками самонаведения». Данное техническое решение принято за прототип. Однако предложенный в нем переход к попеременным передаче и приему сигнала приводит к тому, что, как выше было сказано, поступление информации в контур наведения ракет становится дискретным, что, в свою очередь, ведет к снижению точности наведения, особенно на маневрирующие цели, что является недостатком данного решения.
Настоящее изобретение относится к области авиационной техники, может использоваться при разработке авиационных и зенитных ракет и направлено на решение задачи повышения эффективности поражения цели-постановщика когерентных помех путем пуска и наведения ракет с активным радиолокационным самонаведением без потери непрерывности сопровождения цели и точности наведения.
Поставленная задача решается наведением на цель одновременно двух ракет, при этом излучение зондирующего сигнала осуществляется передатчиками ракет на разных частотах, а прием отраженного от цели сигнала осуществляется на частоте излучения передатчика соседней ракеты.
Предложенный способ обеспечивает условия разнесения в пространстве передачи и приема сигнала, что делает его устойчивым к воздействию помех, т.к. сигнал, излученный передатчиком каждой из ракет (после его отражения от цели), принимается приемником соседней ракеты, которая находится в другой точке пространства и формируемые ее аппаратурой оценки координат цели не подвержены воздействию когерентных помех. При этом информация о цели поступает в приемное устройство непрерывно, что позволяет избежать негативных эффектов при формировании сигналов управления ракетой, связанных с дискретным поступлением информации. Для получения на борту ракеты информации о дальности и скорости сближения с целью, не искажаемой действием когерентных помех, а также для обеспечения, при необходимости, полной автономности каждой из ракет в полете в них добавлен прием отраженных сигналов на частоте излучения собственных передатчиков. При этом наведение ракет осуществляется по максимально расходящимся траекториям типа «клещи». Предложение осуществлять наведение ракет по максимально расходящимся на начальном и среднем участках траекториям типа «клещи» направлено на то, чтобы на большей части траекторий полета ракеты были максимально удалены одна от другой и не входили в область пространства, в которой осуществляется действие когерентной помехи.
Сущность предлагаемого способа поясняется схемой, где на фиг. 1 представлена общая блок-схема аппаратуры ракет и самолета-носителя.
В состав аппаратуры ракеты 1 входят передатчик радиолокационных сигналов (1.1), излучаемых через приемо-передающую антенну (1.2), и приемные устройства радиолокационных сигналов на частоте собственного передатчика (1.3) и частоте передатчика соседней ракеты (1.4). В состав аппаратуры соседней ракеты 2 аналогичным образом входят передатчик (2.1), приемо-передающая антенна (2.2) и приемные устройства радиолокационных сигналов на частоте собственного передатчика (2.3) и частоте передатчика соседней ракеты (2.4). В состав аппаратуры самолета-носителя 3 обеих ракет 1 и 2 должна входить аппаратура (3.1), обеспечивающая настройку приемных устройств (1.4) и (2.4) на прием сигналов, излучаемых передатчиком соседней ракеты в паре. Предлагаемый способ реализуется следующим образом.
Для поражения цели-постановщика помех используется функционально связанная группа, состоящая как минимум из двух ракет с активным радиолокационным наведением, передатчики которых работают на разных частотах. При этом приемные устройства каждой из ракет настроены на частоту излучения передатчика соседней ракеты. В частности, для минимальной группы, состоящей из двух ракет, если передатчик первой ракеты настроен на частоту F1, а передатчик второй ракеты - на частоту F2, то приемник первой ракеты должен быть настроен на прием сигнала на частоте F2, а приемник второй - на прием сигнала на частоте F1 соответственно. Пуск ракет должен осуществляться одновременно. На практике это означает, что интервал между пусками ракет должен быть минимален исходя из возможностей авиационного (или зенитного - для случая зенитных управляемых ракет) комплекса.
После пуска передатчик первой ракеты начинает облучение цели зондирующим сигналом на частоте F1, а передатчик второй ракеты - на частоте F2. В силу отражательных характеристик объектов сложной формы (каковым является реальная воздушная цель) сигнал отражается от нее не только в направлении, откуда пришел зондирующий сигнал, а во всех направлениях в соответствии с бистатической эффективной поверхностью рассеяния (ЭПР) цели. Благодаря этому сигнал частоты F1, излученный передатчиком первой ракеты, принимается настроенным на эту частоту приемником второй ракеты, местоположение которой в пространстве отличается от местоположения первой ракеты. Аналогичная ситуация имеет место и в отношении сигнала частоты F2, излучаемого передатчиком второй ракеты. Таким образом обеспечивается непрерывный прием сигналов, отраженных от цели, каждой из ракет и формирование необходимых сигналов управления. Непрерывность получения информации обеспечивает более высокую точность наведения, особенно в случае маневров цели. Непрерывность получения информации является преимуществом предложенного способа по сравнению с прототипом, где прием сигналов каждой из ракет производится попеременно, что ведет к снижению точности наведения на маневрирующие цели.
Иная ситуация имеет место в отношении помех. Поскольку излучение зондирующего сигнала является демаскирующим признаком ракеты, то система радиопротиводействия цели, обнаружив опасное излучение и определив его частоту и направление прихода, ставит помеху на данной частоте в этом направлении (так как энергетические возможности цели не позволяют поставить достаточно мощные, чтобы быть эффективными, помехи на частотах всех обнаруженных сигналов во всех направлениях.) Таким образом, помеха на частоте F1 ставится в направлении первой ракеты, а на частоте F2 - в направлении второй. Однако такие помехи не будут эффективны, так как первая ракета осуществляет прием сигналов на частоте F2, а вторая - на частоте F1. Это обеспечивает достижение поставленной задачи - обеспечение помехозащищенности без потери точности наведения.
При описанном выше способе взаимодействия ракет - одна излучает сигнал, а другая его принимает - применение ракет возможно только группой, состоящей минимум из двух ракет. При этом, например, при отказе одной из ракет вторая также теряет способность наведения, так как не обладает индивидуальной автономностью. Для обеспечения автономности каждой из ракет в состав ее аппаратуры должен быть добавлен приемник отраженного сигнала на частоте собственного передатчика. При этом, если отраженный сигнал на частоте передатчика соседней ракеты пропал, то сохраняется возможность наведения, принимая отраженный сигнал на частоте собственного передатчика.
Следует также отметить, что поскольку область действия помехи составляет сектор, который характеризуется некоторым угловым размером, то для исключения действия помехи, поставленной одной ракете, на вторую ракету необходимо, чтобы ракеты наводились на цель с различных направлений. Это условие выполняется при наведении ракет по максимально расходящимся траекториям типа «клещи».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ-ПОСТАНОВЩИКА КОГЕРЕНТНЫХ ПОМЕХ РАКЕТАМИ С АКТИВНЫМИ РАДИОЛОКАЦИОННЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 2011 |
|
RU2468381C1 |
| УСТРОЙСТВО УГЛОВОГО СОПРОВОЖДЕНИЯ | 2015 |
|
RU2587466C1 |
| Способ управления направлением излучения зондирующего сигнала при реализации полупассивного самонаведения управляемых ракет класса "воздух-воздух" с радиолокационной головкой самонаведения | 2021 |
|
RU2799492C2 |
| Способ формирования помехи типа "антипод" | 2021 |
|
RU2777922C1 |
| Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты "воздух - воздух" при её самонаведении на вертолет и постановке им уводящих по дальности и скорости помех | 2024 |
|
RU2835459C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152051C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2170940C2 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325306C1 |
| СПОСОБ ПОЛУПАССИВНОГО САМОНАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ КЛАССА "ВОЗДУХ - ВОЗДУХ" С РАДИОЛОКАЦИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2000 |
|
RU2181869C2 |
Изобретение относится к области авиационной техники и может использоваться при разработке авиационных и зенитных управляемых ракет. Предложенный способ поражения цели-постановщика когерентных помех заключается в пространственном разнесении излучателя зондирующего сигнала и приемника отраженного от цели сигнала, которое достигается путем одновременного пуска функционально связанной группы как минимум из двух ракет, передатчики которых излучают на разных частотах, а приемники воспринимают частоты передатчиков соседних ракет. Это практически исключает взаимные помехи, т.к. приемники прицельно настроены на частоту излучаемого сигнала своего передатчика и находятся вне полосы частот приемника. При этом обеспечивается высокоточное наведение ракет, которые необходимо пускать по максимально расходящимся траекториям типа «клещи». Технический результат - повышение эффективности поражения цели-постановщика когерентных помех путем пуска и наведения ракет с активными радиолокационными головками самонаведения, излучающими зондирующие сигналы на разных частотах, с приемниками, настроенными на частоту передатчиков соседних ракет. 2 з.п. ф-лы, 1 ил.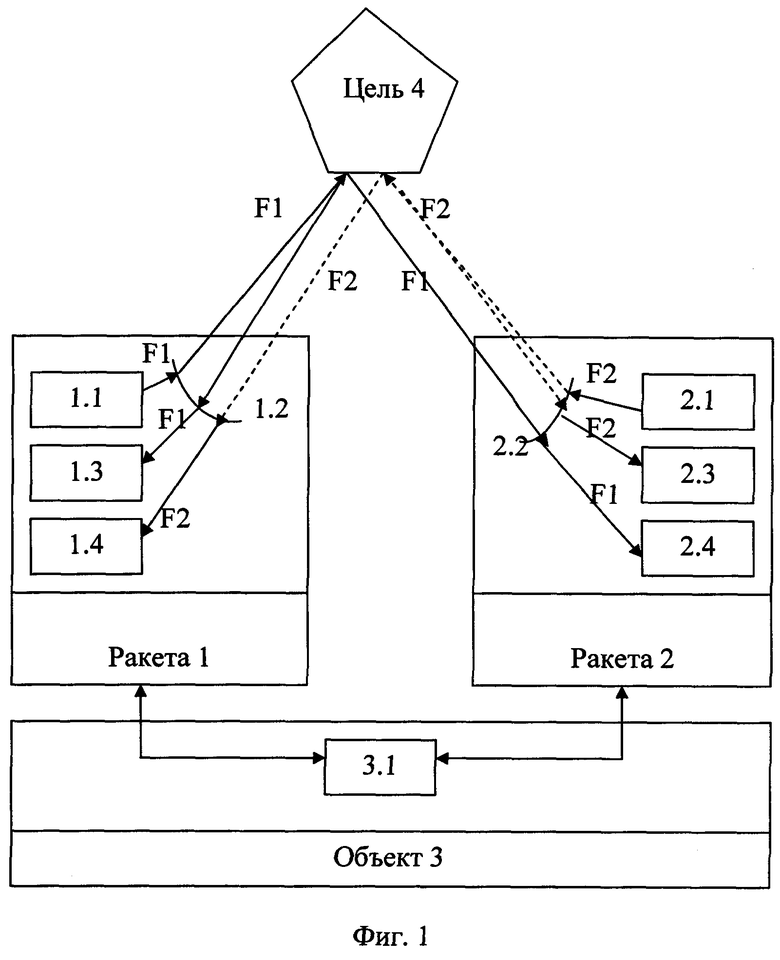
1. Способ поражения цели-постановщика когерентных помех ракетами с активными радиолокационными головками самонаведения, включающий излучение зондирующего сигнала, прием отраженного от цели сигнала и одновременный пуск двух ракет, излучающих зондирующие сигналы на разных частотах, отличающийся тем, что прием отраженного от цели сигнала каждой из ракет производится на частоте излучения соседней ракеты.
2. Способ поражения по п. 1, отличающийся тем, что в ракетах добавлен прием отраженных сигналов на частоте излучения собственных передатчиков.
3. Способ поражения по п. 1, отличающийся тем, что наведение ракет осуществляется по максимально расходящимся траекториям типа «клещи».
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| СПОСОБ ПОЛУПАССИВНОГО САМОНАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ КЛАССА "ВОЗДУХ - ВОЗДУХ" С РАДИОЛОКАЦИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2000 |
|
RU2181869C2 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ СТАНЦИЙ АКТИВНЫХ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ САМОЛЕТОВ САМОНАВОДЯЩИМСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2506522C2 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |

