Изобретение относится к технике радиоэлектронного подавления и может быть использовано в аппаратуре противодействия ракетам с головками самонаведения.
Решение задачи обнаружения, захвата и поражения цели средствами перехвата ЗРК сводится к обеспечению уверенного приема отраженного от цели сигнала.
Применение помех имитационного типа эффективно против импульсно-доплеровских РЛС, использующих конический метод пеленгации, и малоэффективно против РЛС, использующих моноимпульсный способ пеленгации. С точки зрения особенностей построения угломерных моноимпульсных координаторов потенциально высокой эффективностью их подавления обладают ретрансляционные помехи из вынесенной точки и поляризационные. Воздействие поляризационных помех приводит к инверсии каналов пеленгования и полному нарушению работоспособности пеленгационной системы вследствие расфазировки координатной системы и нарушения нормировки сигналов. Ретрансляционные помехи могут быть реализованы двумя способами - физическим размещением источника помехи вдали от цели и помехой типа «антипод». В этом случае нарушение в работе угломерных каналов происходит путем перенацеливания активной радиолокационной головки самонаведения на источник помехового сигнала. Для защиты объектов, большая часть траектории которых располагается на малой высоте, применение отделяемых станций помех и буксируемых ловушек накладывает такие ограничения, как время эффективной работы и габариты. В этом случае наиболее предпочтительным способом защиты является помеха «антипод».
Из уровня техники известен патент Канады СА 1341558С «Radar Jamming Method and Apparatus)), опубликованный 23.10.2007, принятый за прототип. В патенте раскрыты способ и устройство для постановки помех радиоаппаратуре, если самолет находится на высоте меньшей, чем ракета, а также на небольших дальностях. Излучение направляется к поверхности земли с достаточной мощностью для создания ложного сигнала. В аппаратуре предусмотрены средства ослабления боковых лепестков источника излучения при условии, что отраженный луч также имеет достаточно большую мощность. Недостатком предложенного решения является то, что постановка помех осуществляется в узком диапазоне частот и требует высокой мощности передатчика.
Техническим результатом заявленного изобретения является работа в широком диапазоне частот, отсутствие необходимости в сложной широкополосной фазовой калибровке, высокая вероятность перенацеливания, прицельное воздействие формируемой помехи на подавляемое средство по основному лепестку диаграммы направленности антенны.
Для достижения технического результата применяется способ формирования помехи типа «антипод)) радиоэлектронным средствам (РЭС), заключающийся в том, что аппаратурой радиотехнической разведки определяют наличие, направление и дальность подавляемого РЭС, осуществляют прием зондирующих сигналов излучаемых активной радиолокационной головки самонаведения (АРГСН) РЭС, после чего аппаратурой радиоэлектронного подавления ретранслируют принятый сигнал АРГСН РЭС в направлении подстилающей поверхности, отличающийся тем, что прием зондирующих сигналов АРГСН РЭС осуществляют на защищаемом объекте с помощью двух антенных систем, разнесенных в пространстве, первая из которых принимает зондирующие сигналы напрямую от АРГСН РЭС, а вторая - после их отражения от подстилающей поверхности, и, анализируя разности фаз принимаемых сигналов, определяют угловое направление на РЭС и на зеркальное отражение РЭС от подстилающей поверхности, зная высоту полета защищаемого объекта, вычисляют дальность и угловые координаты РЭС, для излучения помехового сигнала используют антенную систему с узкой диаграммой направленности, которая позволяет изменять угловое положение главного лепестка в таких пределах, чтобы ориентировать его в направлении зеркального отражения РЭС от подстилающей поверхности при всех возможных типовых углах подлета РЭС, угловое положение главного лепестка излучающей антенны защищаемого объекта устанавливают в соответствии с текущим положением РЭС, после чего принятый зондирующий сигнал АРГСН РЭС переизлучают на подстилающую поверхность, обеспечивая зеркальное отражение помехи от подстилающей поверхности и попадание ее в главный лепесток диаграммы направленности АРГСН РЭС, что создает ложную цель, уровень сигнала в приемнике АРГСН РЭС от ложной цели будет превышать суммарный уровень отраженного зондирующего сигнала АРГСН РЭС, отраженного от защищаемого объекта, паразитного сигнала помехи, излученного через боковой лепесток антенной системы напрямую к РЭС, и шума, что приводит к перенацеливанию РЭС на ложную цель вплоть до момента выхода защищаемого объекта из диаграммы направленности АРГСН РЭС.
Изобретение поясняется чертежами.
На фиг. 1 показано расположение ракеты противника и объекта защиты.
На фиг. 2 показан вариант реализации комплексного пеленгатора.
На фиг. 3 показана блок-схема аппаратуры защиты объекта.
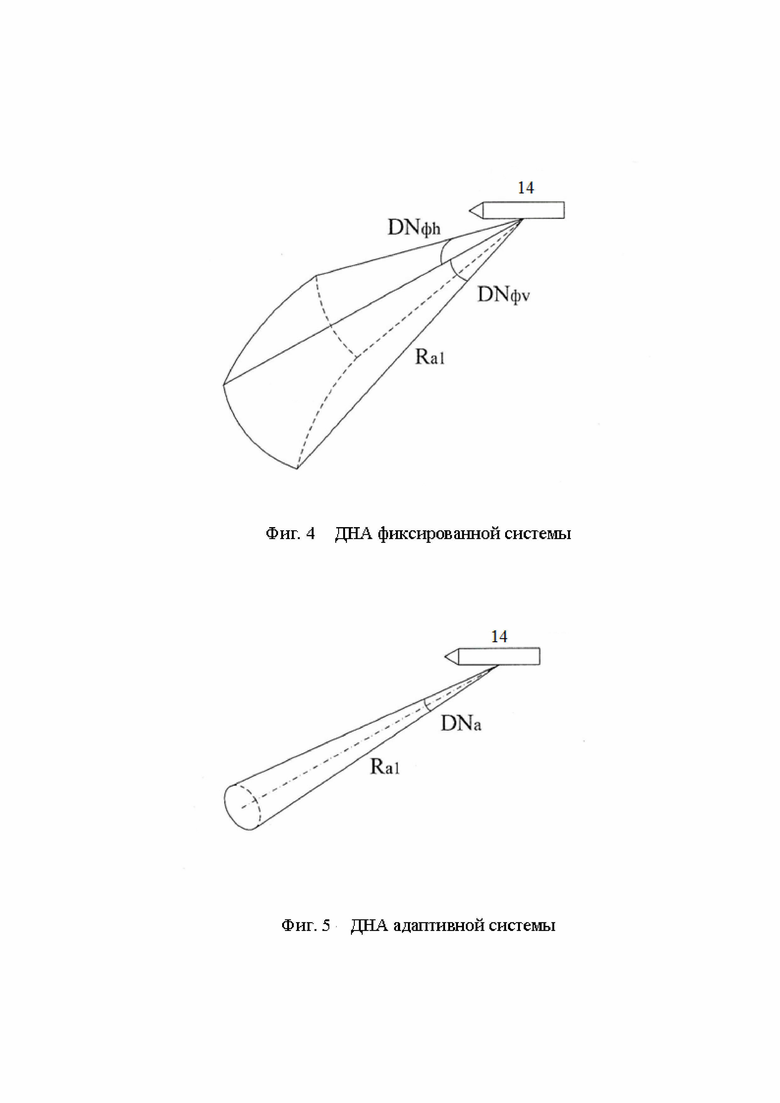
На фиг. 4 показана диаграмма направленности антенны (ДНА) фиксированной системы.
На фиг. 5 показана ДНА адаптивной системы.
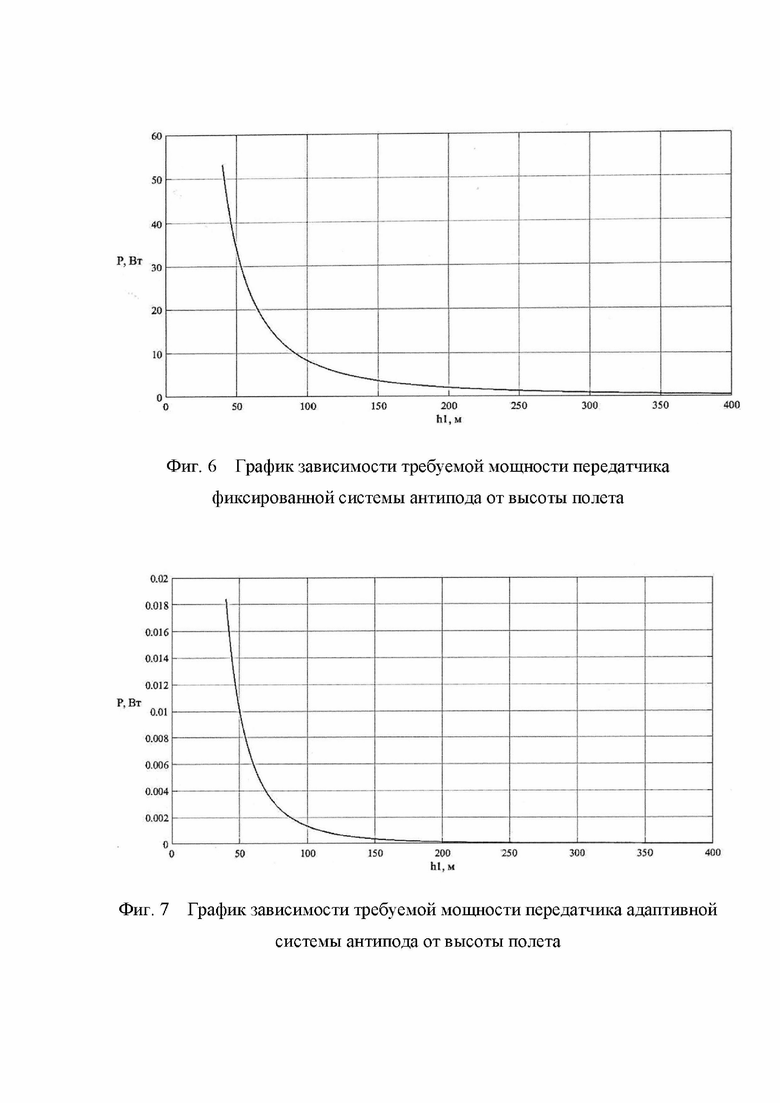
На фиг. 6 показан график зависимости требуемой мощности передатчика фиксированной системы антипода от высоты полета.
На фиг. 7 показан график зависимости требуемой мощности передатчика адаптивной системы антипода от высоты полета.
На фиг. 1-7 приняты обозначения.
1. Антенна приемная 1.
2. Антенна приемная 2.
3. Измеритель разности фаз.
4. Малошумящий усилитель МКШУ.
5. Блок формирования пеленгационной характеристики и определения дальности цели.
6. Устройство формирования ретрансляционного сигнала.
7. Блок обработки информации и формирования команд управления.
8. Активная фазированная антенная решетка АФАР.
9. Диаграммообразующее устройство.
10. Приемо-передающее устройство ППУ.
11. Устройство управления фазовращателями.
12. Фазовращатели.
13. Антенная решетка.
14. Объект защиты.
15. Ракета противника.
Принцип создания помехи типа «антипод» состоит в формировании аппаратурой РЭБ, находящейся на объекте защиты (ОЗ), ответного ретрансляционного сигнала на подстилающую поверхность (ПП), при этом отраженный от земли сигнал имитирует ложную цель (см. фиг. 1).
Условием воздействия помехового сигнала «антипод» является попадание отраженного от ПП сигнала в основной лепесток ДНА головки самонаведения (ГСН). При этом условии на вход ГСН будут приходить три сигнала.
Так как в приведенном случае рассматриваются соотношения мощностей сигналов на входе одного приемника и на частоте зондирующего сигнала ГСН РП, то эффективность помехи будет определяться соотношением плотностей мощности сигнала у приемной антенны ГСН РП:
где q - отношение мощности помехи к мощности отраженного сигнала;
qП - коэффициент подавления ГСН РП;
Nотр - плотность мощности сигнала, отраженного от ОЗ, у приемной антенны ГСН РП;
Nбок - плотность мощности сигнала помехи, излученной по боковым лепесткам ДНА постановщика помех, у приемной антенны ГСН РП;
Nпом - плотность мощности сигнала помехи, отраженного от ПП, у приемной антенны ГСН РП.
Необходимый уровень сигнала помехи зависит от нескольких факторов - мощности передатчика, ширины ДНА постановщика помех, высоты полета, отражающих свойств ПП, эффективной поверхности рассеяния (ЭПР) цели, уровня боковых лепестков и направления основного лепестка ДНА постановщика помех.
Удельную ЭПР ПП можно определить по формуле
σпов = σотр + σдиф,
где σотр - ЭПР поверхности, связанная с зеркальным отражением радиоволны;
σдиф - ЭПР поверхности, связанная с диффузным отражением радиоволны.
При зеркальном отражении распространение сигнала происходит по законам геометрической оптики. При диффузном отражении ПП можно представить как η независимых отражателей. В общем случае диффузно отраженный сигнал будет действовать на ГСН на всей траектории полета, при этом для обеспечения эффективности помехи в условиях диффузного отражения требуется более высокая мощность.
В дальнейшем расчете необходимого энергетического потенциала помехи в качестве наихудшего условия будет учитываться только диффузная компонента, а для геометрического представления воздействия помехи типа «антипод» будет приниматься во внимание только зеркальное отражение.
На фиг. 1 показано расположение ракеты противника 15 и объекта защиты 14. Точка А соответствует моменту, когда РП влетает в зону действия антипода, точка В - моменту, когда сигнал антипода выходит из основного лепестка ДНА РП, при условии, что ГСН РП направлена на ОЗ. Угол θ равен половине ширины ДНА ГСН, расстояние AR характеризует дальность, на которую РП со скоростью U летит в зоне действия помехи-антипода, ОЗ летит на высоте h1 со скоростью V, а β - угол сближения РП по отношению к строительной оси ОЗ. ДНА постановщика помех направлена в вертикальной плоскости на ПП в диапазоне углов от α0 до α1 по отношению к строительной оси ОЗ. Сигнал антипода отражается от ПП и принимается АРГСН РП.
Для того, чтобы ГСН РП перенацелилась на сигнал антипода, необходимо, чтобы РП находилась в зоне действия помехи в течение времени захвата цели tз. Расстояние AR, которое пролетит РП за время tз в зоне действия антипода:
ΔR=VPП * tЗ.
Для воздействия на РП с достаточным временем для захвата при заданном угле подлета β ширина луча антипода DNЗ должна быть не менее
DNЗ (β)=α1-α0.
Угол возможного подлета РП β находится в диапазоне β ∈ [βmin, βmax]. Каждому из возможных значений β соответствуют свои требуемые значения углов наклона луча антипода α0, α1. Чтобы определить оптимальную ширину ДНА антипода в вертикальной плоскости для всех возможных значений β, угол α0 выбирают минимальным, а угол α1 - максимальным. Тогда ширина ДНА антипода в вертикальной плоскости DΝфv будет
DNфv = αmax -·αmin.
Ширина ДНА антипода в горизонтальной плоскости DNфh определяется из условия возможного появления РП сбоку от ОЗ под углом βmax:
Для типовых значений угла подлета РП от 3° до 35° ширина ДНА антипода в горизонтальной плоскости должна быть не менее 70° при классической схеме построения антипода (с фиксированным углом скольжения). Можно ожидать, что в таких условиях потребуются значительные энергетические затраты для обеспечения подавления ГСН. С целью устранения недостатков классического антипода предлагается адаптивный принцип организации помехи типа «антипод» - с автоматической подстройкой наклона луча.
Автоматическая подстройка угла скольжения антипода может быть реализована при условии определения наличия РП и ее координат. Аппаратура защиты в этом случае должна быть представлена двумя функциональными частями - аппаратурой РТР и аппаратурой радиоэлектронного противодействия (РЭП).
Аппаратура РТР представляет собой комплексный метод оценки пеленга. Суть метода заключается в том, что точная оценка пеленга осуществляется применением измерения угла прихода электромагнитной волны с помощью интерферометра, а устранение фазовой неоднозначности измерения устраняется предварительным измерением пеленга амплитудным методом. На фиг. 2 представлен вариант схемы реализации комплексного пеленгатора. Здесь θ - угол между равносигнальным направлением излучателей и направлением падения волны.
Алгоритм работы аппаратуры формирования помехи с адаптивным углом скольжения (аппаратуры РЭП) заключается в следующем. Угловое направление на РП определяется при помощи комплексного пеленгатора. Дальность до цели определяется с помощью триангуляционного способа, используя пассивный режим работы АФАР. При объединении данных с комплексного пеленгатора об угловом направлении РП и с АФАР о дальности РП в блоке обработки информации можно с достаточной точностью определить координаты цели. Далее с помощью АФАР формируются ретрансляционные помехи типа «антипод». Получив данные о координатах РП, и используя возможности АФАР, можно обеспечить формирование ДНА с адаптивным углом скольжения, тем самым обеспечив эффективную постановку помехи на всем протяжении полета ОЗ.
На фиг. 3 показана блок-схема аппаратуры защиты.
Антенна 1 осуществляет прием зондирующего сигнала ГСН по первому каналу. Антенна 2 осуществляет прием зондирующего сигнала ГСН по второму каналу. Измеритель разности фаз 3 служит для определения фазовой разницы между первым и вторым каналом. МКШУ 4 усиливает принятый зондирующий сигнал ГСН. В блоке формирования пеленгационной характеристики и определения дальности цели 5 проводится вычисление координат РП. Устройство формирования ретрансляционного сигнала 6 обрабатывает принятый зондирующий сигнал ГСН и формирует помеховый сигнал. Блок обработки информации и формирования команд управления 7 выполняет функцию центрального вычислителя аппаратуры. АФАР 8 формирует заданную диаграмму направленности и состоит из диаграммообразующего устройства 9, формирующего диаграмму направленности единичного излучателя 10. Диаграммообразующее устройство 9 состоит из устройства управления фазовращателями 11, которое формирует управляющие напряжения, по которым фазовращатель 12 изменяет значения фазы сигнала. Антенная решетка 13 представляет собой набор элементарных излучателей 10 (ППУ).
Адаптивная система формирования помехи будет иметь преимущества по энергетическому потенциалу и требованиям к максимальному уровню боковых лепестков ДНА относительно фиксированной системы. Достаточная ширина ДНА антипода адаптивной системы в горизонтальной и вертикальной плоскостях будет определяться как максимальная из диапазона полученных значений DNЗ:
DΝЗ = max(DΝЗ(β)),
где DΝ3(β) = α1 - α0, a β ∈ [βmin, βmax].
Сектор сканирования АФАР при этом будет ограничен условиями ширины ДНА в вертикальной плоскости - DΝфv = α1max - α0min и горизонтальной плоскости - DΝфh = 2*βmax. ДНА для фиксированной и адаптивной систем антипода условно показаны на фиг. 4 и фиг. 5. Здесь Ra1 - расстояние от ОЗ до точки подсвета на ПП, DΝфv и DΝфh - ширина ДНА для фиксированной системы в вертикальной и горизонтальной плоскостях, DNa - ширина ДНА для адаптивной системы.
Расчет требуемых мощностей передатчика для фиксированной и адаптивной систем антипода при одинаковых исходных данных показывает, что для обеспечения эффективности помехи при адаптивном способе формирования луча антипода требуется мощность передатчика в тысячи раз меньше, чем при фиксированном (фиг. 6 и фиг. 7).
Для фиксированной системы существует ограничение по уровню боковых лепестков ДНА, при превышении которого значения требуемой мощности помехи переходят через неопределенность в область отрицательных значений, что говорит о невозможности применения помехи «антипод» в этой области параметров. При этом адаптивная система имеет менее жесткие требования к уровню излучения в направлении боковых лепестков.
Необходимо отметить, что предложенный способ формирования помехи типа «антипод» с адаптивным углом скольжения имеет ряд технических тонкостей, которые необходимо учитывать при проектировании. Так, значительный уровень боковых лепестков АФАР можно компенсировать с помощью конструктивных решений, а апертуру решетки уменьшить за счет увеличения ширины луча и небольшого (в сравнении с требованиями к фиксированной системе) увеличения мощности передатчика.
Изобретение относится к технике радиоэлектронного подавления и может быть использовано в аппаратуре противодействия ракетам с головками самонаведения. Техническим результатом является работа в широком диапазоне частот, отсутствие необходимости в сложной широкополосной фазовой калибровке, высокая вероятность перенацеливания, прицельное воздействие формируемой помехи на подавляемое средство по основному лепестку диаграммы направленности антенны. В заявленном способе формирования помехи типа «антипод» радиоэлектронным средствам (РЭС) прием зондирующих сигналов активной радиолокационной головки самонаведения (АРГСН) РЭС осуществляют на защищаемом объекте с помощью двух антенных систем, разнесенных в пространстве. Первая система принимает зондирующие сигналы напрямую от АРГСН РЭС, а вторая - после их отражения от подстилающей поверхности. По разности фаз принимаемых сигналов определяют угловое направление на РЭС и на зеркальное отражение РЭС от подстилающей поверхности, вычисляют дальность и угловые координаты РЭС. Для излучения помехового сигнала используют антенную систему с узкой диаграммой направленности, которая позволяет изменять угловое положение главного лепестка в таких пределах, чтобы ориентировать его в направлении зеркального отражения РЭС от подстилающей поверхности при всех возможных типовых углах подлета РЭС. Угловое положение главного лепестка излучающей антенны защищаемого объекта устанавливают в соответствии с текущим положением РЭС, после чего принятый зондирующий сигнал АРГСН РЭС переизлучают на подстилающую поверхность, обеспечивая зеркальное отражение помехи от подстилающей поверхности и попадание ее в главный лепесток диаграммы направленности АРГСН РЭС, что создает ложную цель. 7 ил.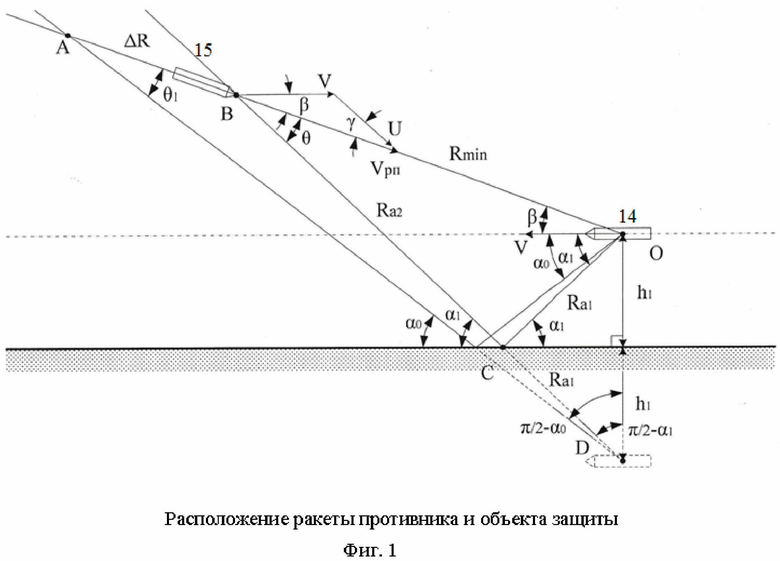
Способ формирования помехи типа «антипод» радиоэлектронным средствам (РЭС), заключающийся в том, что аппаратурой радиотехнической разведки определяют наличие, направление и дальность подавляемого РЭС, осуществляют прием зондирующих сигналов, излучаемых активной радиолокационной головкой самонаведения (АРГСН) РЭС, после чего аппаратурой радиоэлектронного подавления ретранслируют принятый сигнал АРГСН РЭС в направлении подстилающей поверхности, отличающийся тем, что прием зондирующих сигналов АРГСН РЭС осуществляют на защищаемом объекте с помощью двух антенных систем, разнесенных в пространстве, первая из которых принимает зондирующие сигналы напрямую от АРГСН РЭС, а вторая – после их отражения от подстилающей поверхности, и, анализируя разности фаз принимаемых сигналов, определяют угловое направление на РЭС и на зеркальное отражение РЭС от подстилающей поверхности, зная высоту полета защищаемого объекта, вычисляют дальность и угловые координаты РЭС, для излучения помехового сигнала используют антенную систему с узкой диаграммой направленности, которая позволяет изменять угловое положение главного лепестка в таких пределах, чтобы ориентировать его в направлении зеркального отражения РЭС от подстилающей поверхности при всех возможных типовых углах подлета РЭС, угловое положение главного лепестка излучающей антенны защищаемого объекта устанавливают в соответствии с текущим положением РЭС, после чего принятый зондирующий сигнал АРГСН РЭС переизлучают на подстилающую поверхность, обеспечивая зеркальное отражение помехи от подстилающей поверхности и попадание ее в главный лепесток диаграммы направленности АРГСН РЭС, что создает ложную цель, уровень сигнала в приёмнике АРГСН РЭС от ложной цели будет превышать суммарный уровень отраженного зондирующего сигнала АРГСН РЭС, отраженного от защищаемого объекта, паразитного сигнала помехи, излученного через боковой лепесток антенной системы напрямую к РЭС, и шума, что приводит к перенацеливанию РЭС на ложную цель вплоть до момента выхода защищаемого объекта из диаграммы направленности АРГСН РЭС.
| Способ определения кольматирующих свойств полимерного безглинистого бурового раствора | 1985 |
|
SU1341558A1 |
| Способ создания преднамеренных активных сигналоподобных имитационных помех радиоэлектронным средствам | 2018 |
|
RU2694366C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА РАДИОСВЯЗИ ОТ РАДИОНАВОДИМОГО ВЫСОКОТОЧНОГО ОРУЖИЯ И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2516265C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 2010 |
|
RU2436114C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152051C1 |
| CN 110133604 A, 16.08.2019 | |||
| US 4763128 A, 09.08.1988 | |||
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ УДЕРЖИВАЮЩЕЙ ПРОКАТНОЕ КОЛЬЦО ГАЙКИ | 2000 |
|
RU2220798C2 |

