Изобретение относится к области электромеханики и систем автоматического управления и может найти применение при построении замкнутых аппаратов, движение которых осуществляется без расходования реактивных масс, выбрасываемых наружу, как в ракетах, или за счет фактора трения, как это характерно для автомобилей, кораблей, вертолетов и т.д.
В физике введено понятие консервативной системы, под которой понимается механическая система, при движении которой сумма ее кинетической и потенциальной энергий остается неизменной величиной, то есть имеет место закон сохранения энергии [1-2]. Такая система движется в стационарном (не изменяющемся со временем) потенциальном силовом поле при условии, что система свободна или наложенные на нее связи являются идеальными и не изменяющимися с течением времени. Примером тому является Солнечная система. В земных условиях благодаря неизбежному наличию сопротивлений движению консервативная система осуществляется лишь грубо приближенно. Примером может служить колеблющийся маятник, если при этом пренебречь трением в его подвесе и трением о воздух. Консервативная система может быть замкнутой, для которой характерным является соблюдение закона сохранения количества движения. Замкнутая система может и не быть консервативной, если внутренние ее силы не являются потенциальными. Консервативная система может быть незамкнутой, то есть ее движение может происходить в потенциальном силовом поле, образованном телами, не входящими в консервативную систему, как это имеет место с маятником в поле тяготения Земли, и при этом последняя в консервативную систему не входит. То же имеет место и в случае космических аппаратов в поле тяготения Земли, и движение космических аппаратов осуществляется под воздействием гравитационного поля Земли.
Известно, что замкнутая консервативная система не способна к самодвижению под действием только ее внутренних сил [3-4], и для движения требуется либо приложение внешней силы, либо действие реактивной тяги путем выбрасывания за пределы этой системы некоторой массы в определенном направлении с какой-то скоростью, как это имеет место во всех существующих летательных аппаратах с реактивными двигателями [5]. Однако при этом система уменьшает свою массу - массу реактивного топлива, запасы которого не безграничны, что исключает возможность сверхдлительных маршрутов космических аппаратов. Приложение в этом случае к таким космическим аппаратам внешних сил также практически исключается (например, направленным потоком электромагнитной энергии, создающим давление по аналогии с ветром для парусника на море). Поиск соответствующих движителей взамен реактивных является актуальной технической проблемой.
Ближайшим аналогом заявляемого технического решения является «Устройство преобразования энергии вращательного движения в поступательное» по патенту РФ №2304340, опубл. в бюл. №22 от 10.08.2007 (заявка №2006106659/09 (007206) с приоритетом от 03 марта 2006) [6].
Оно состоит из двух электрических двигателей, роторы и статоры которых свободно вращаются соответственно на двух осях, жестко закрепленных на раздвигающихся по направляющим корпуса системы основаниям осей, связанным между собой стягивающими пружинами, статоры двух электрических двигателей осесимметрично жестко связаны соответственно с парой дисков с постоянным механическим контактом между ними под действием указанных стягивающих пружин, и тормозного клина с приводом тормозного клина для периодического введения последнего между указанными дисками, привод тормозного клина электрически связан с силовым выходом генератора импульсов, при этом электрические двигатели подключены к источнику электрического тока соответственно через два коммутатора, управляющие входы которых подключены ко второму выходу генератора импульсов, а подключение двух электрических двигателей к источнику электрического тока выполнено так, что их статоры вращаются во взаимно противоположных направлениях.
Недостатком известного устройства является использование в нем тормозного клина с его приводом, вводимого периодически между вращающимися дисками для их торможения, что связано с заметным износом трущихся частей устройства и уменьшением срока действия последнего.
Указанный недостаток прототипа устранен в заявляемом техническом решении.
Целью изобретения является повышение надежности и срока действия устройства.
Указанная цель достигается в устройстве преобразования энергии вращательного движения в поступательное, содержащем два электрических двигателя, роторы и статоры которых свободно вращаются соответственно на двух осях, статоры двух электрических двигателей осесимметрично жестко связаны соответственно с парой дисков с постоянным механическим зацеплением между ними, отличающемся тем, что роторы двигателей механически связаны с дисками-эксцентриками с размещенными на них диаметрально противоположно центру сосредоточения масс эксцентриков электромагнитных тормозных приводов, включаемых в моменты времени, когда векторы количества движения обоих эксцентриков коллинеарны и совпадают с вектором возникающей внутри системы силы, передаваемой через оси вращения эксцентриков к системе для ее движения в направлении действия этой силы, статоры двигателей имеют одинаковые с роторами моменты инерции с учетом присоединенных к роторам и статорам масс и моменты трения, кроме того, устройство содержит последовательно включенные датчик углового положения эксцентрика, процессор и генератор импульсов, выход которого подсоединен к обмоткам электромагнитных тормозных приводов и к управляющему входу источника питания электрических двигателей.
Поставленная цель достигается благодаря действию силы инерции вращающихся эксцентриков, которые испытывают замедление со стороны включаемых электромагнитных тормозных приводов в моменты времени, когда указанные электромагнитные тормозные приводы расположены на минимальном расстоянии друг от друга, то есть оказывают наиболее сильное тормозное действие для вращающихся эксцентриков, а мгновенное положение векторов количества движения последних совпадает с возникающей силой инерции, движущей систему в направлении действия этой силы. При этом к системе прикладывается как бы внешняя сила от точки опоры, находящейся внутри самой системы и являющейся виртуальной точкой, находящейся в центре магнитного потока, образующегося при включении электромагнитных тормозных приводов, или, что то же, в точке касания двух эксцентриков в форме дисков с вынесенным от их осей центром инерции. Последующий разгон вращающихся эксцентриков, осуществляемый, например, электродвигателем, питаемым от источника электрической энергии (которая может восполняться с помощью солнечных батарей), выполняется без появления силовой реакции на систему в противоположном направлении по отношению к указанной внутренней силе инерции тормозимых эксцентриков, что достигается использованием электрического двигателя, ротор и статор которого свободно насажены на неподвижную ось (стакан), закрепленную на платформе системы, обладают вместе с присоединенными к ним массами приблизительно одинаковыми моментами инерции и моментами трения, то есть при пуске двигателя разгоняются во взаимно противоположных направлениях, что не создает какой-либо силовой реакции на систему. Таким образом, на систему действуют только однонаправленные импульсы силы в моменты торможения эксцентриков, а импульсы сил. возникающие от простого вращения эксцентриков, равны и противоположно направлены, то есть компенсируют друг друга, не оказывая никакого действия на систему, кроме ее вибрации, которая может быть успешно демпфирована. При этом важно отметить, что виртуальная точка опоры (ВТО) не связана с корпусом системы, хотя и находится внутри нее. и проявляет как бы внешнюю по отношению к системе среду, от которой исходит действие силы.
Действие заявляемого технического решения поясняется приводимыми рисунками.
На фиг.1 представлена схема устройства из двух вращающихся с одинаковой угловой скоростью во взаимно противоположных направлениях эксцентриков 1 и 2, основная масса которых сосредоточена в областях 3 и 4 соответственно. Противоположно последним на эксцентриках установлены (на краях дисков) электромагнитные тормозные приводы 5 и 6, электрически соединенные с выходом генератора импульсов 7, работой которого управляет процессор 8. вход которого соединен с электромагнитным датчиком углового положения эксцентрика 9. Эксцентрики 1 и 2 расположены на платформе системы 10, механически связанной с корпусом системы 11 через пружины 12, демпфирующие возвратно-поступательные вибрации. Эксцентрики 1 и 2 выполнены в виде связанных между собой дисков, например, шестеренчатой связью, что обеспечивает синфазность вращения их центров тяжести. При этом эти центры тяжести всегда оказываются диаметрально противоположными положению электромагнитных тормозных приводов 5 и 6, жестко закрепленных на краях дисков эксцентриков 1 и 2. На фиг.1 показано, что центры тяжести эксцентриков и оси расположения электромагнитных тормозных приводов лежат на одной прямой, ортогональной возникающей силе инерции при магнитном сцеплении этих приводов при подаче на них электрического импульса от генератора импульсов 7.
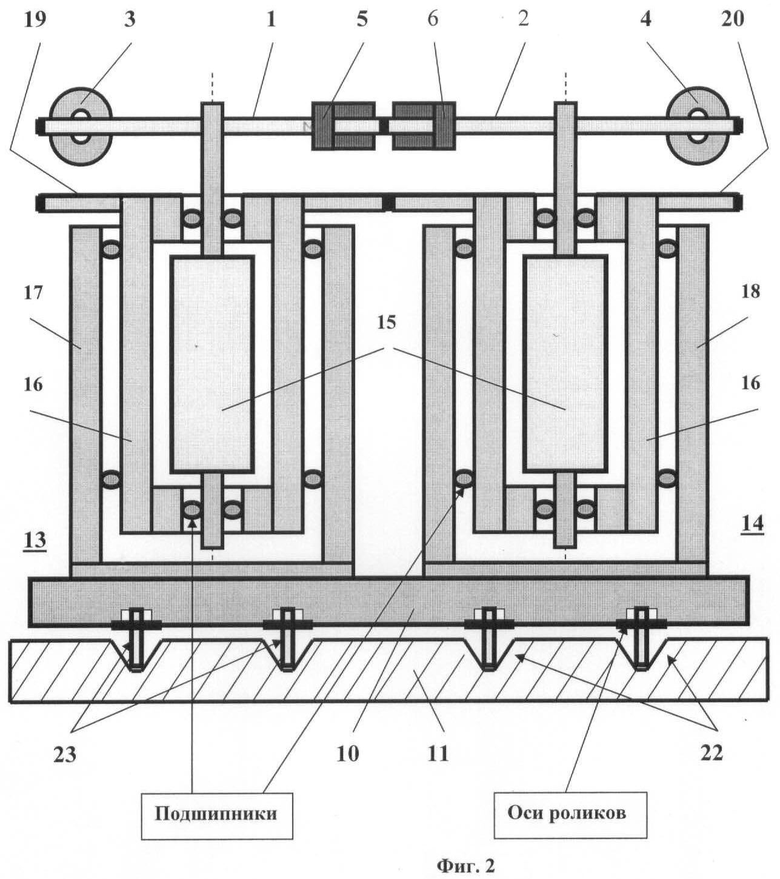
На фиг.2 представлен один из вариантов организации вращения эксцентриков 1 и 2 от электрических двигателей 13 и 14, роторы 15 и статоры 16 которых свободно вращаются на жестко закрепленных на платформе системы 10 осях 17 и 18 соответственно (или в осях в форме стаканов, как на фиг.2). При этом эксцентрики 1 и 2 приводятся во вращение роторами 15 соответствующих электрических двигателей 13 и 14, а их статоры 16 вращаются свободно (без периодического торможения) вместе с присоединенными к ним массами (не обязательно эксцентричными) в форме связанных между собой шестерен 19 и 20, что делает их угловую скорость одинаковой и противоположно направленной. Вращение эксцентриков 1 и 2 во взаимно противоположных направлениях естественно обеспечивается свойством связанных шестерен, и при этом питание электрических двигателей 13 и 14 от источника питания 21 осуществляется таким образом, чтобы роторы 15 электрических двигателей 13 и 14 вращались во взаимно противоположных направлениях. В моменты включения электромагнитных тормозных приводов питание на электрические двигатели 13 и 14 может отключаться с целью экономии электроэнергии и вновь подаваться после отключения электромагнитных тормозных приводов 5 и 6. С этой целью выход генератора импульсов 7 также подключен к управляющему входу источника питания 21. Платформа системы 10 с укрепленными на ней электрическими двигателями 13 и 14 и эксцентриками 1 и 2 и прочими элементами устройства упруго связана с корпусом системы 11 через пружины 12 и двигается возвратно-поступательно по направляющим 22 корпуса системы 11 на роликах 23.
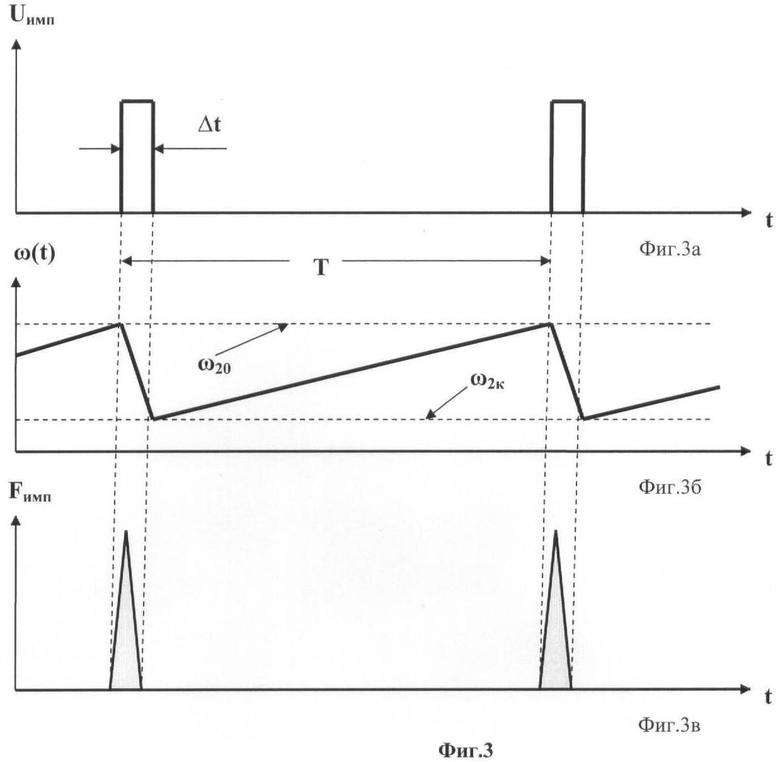
На фиг.3 представлены графики:
- на фиг.3а - периодическая последовательность импульсов торможения эксцентриков 1 и 2 (фиг.1), вырабатываемая генератором импульсов 7 при участии процессора 8, перерабатывающего информацию о текущей скорости вращения эксцентриков 1 и 2 и угловом положении центра тяжести эксцентрика 1 и определяющего момент подачи импульса торможения на электромагнитные тормозные приводы 5 и 6 с учетом запаздывания возникновения в последних максимумов силы магнитного притяжения, которые должны достигаться при совмещении полюсов электромагнитов этих приводов для эксцентриков 1 и 2;
- на фиг.3б диаграмма угловой скорости вращения эксцентриков 1 и 2 во времени при их разгоне и торможении;
- на фиг.3в - периодическая последовательность однонаправленных импульсов силы, возникающих в моменты торможения эксцентриков 1 и 2. Среднее значение этих импульсов, определяемое через их скважность и форму, задает внутреннюю силу, движущую систему в направлении ее действия.
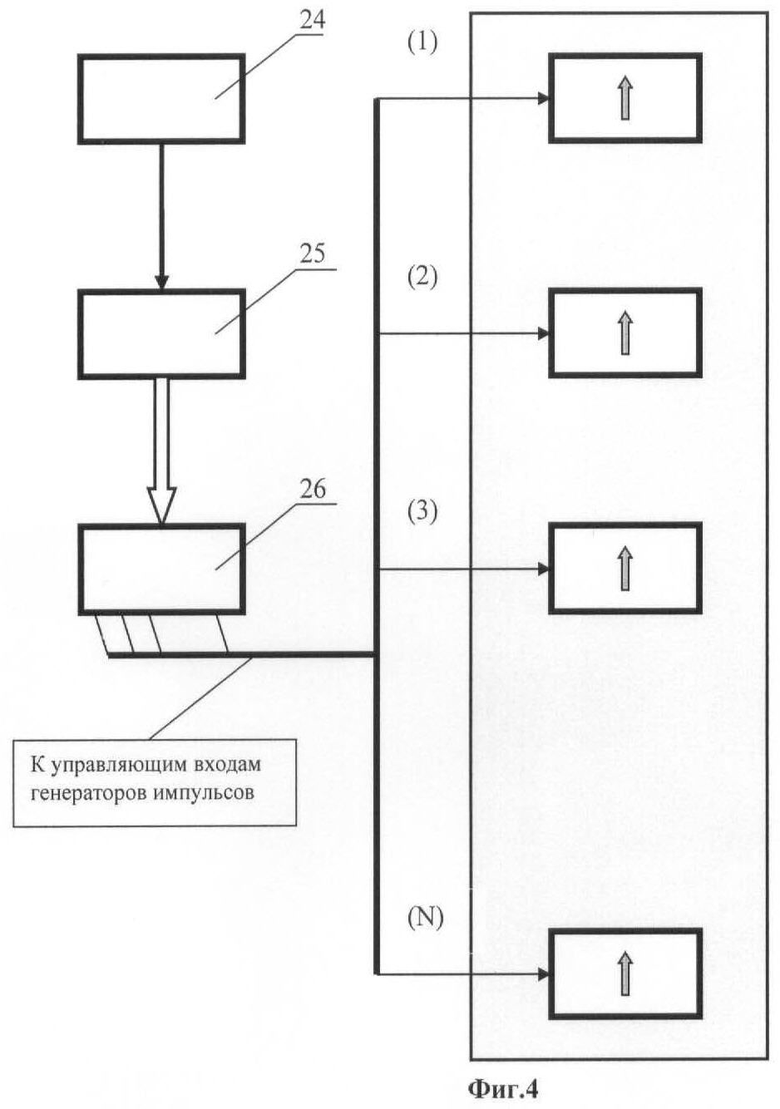
На фиг.4 представлена блок-схема управления работой электромагнитных тормозных приводов 5 и 6 в каждом из N движителей на дисках вместо эксцентриков 1 и 2 (фиг.1), обеспечивающая их периодически поочередную работу. Она содержит последовательно включенные генератор тактовых импульсов 24, пересчетную схему 25 с коэффициентом пересчета, равным числу N используемых в группе движителей на дисках, и дешифратор 26 с N выходами, которые включены к управляющим входам запуска генераторов импульсов 7 каждого из движителей.
Рассмотрим действие заявляемого устройства.
Работа устройства основана на использовании двух важных обстоятельств - достижения невозмущенного состояния системы при разгоне эксцентриков 1 и 2 электрическими двигателями 13 и 14 от торможения к торможению эксцентриков 1 и 2 электромагнитными тормозными приводами 5 и 6 и создания ВТО внутри замкнутой консервативной системы, не связанной механически с корпусом системы через какие-либо жесткие тела. Первая из задач обеспечивается свободным вращением роторов 15 и статоров 16 электрических двигателей 13 и 14 во взаимно противоположных направлениях при выборе одинаковых моментов инерции и моментов трения роторов и статоров с присоединенными к ним массами соответственно эксцентриков 1 и 2 (для роторов) и шестерен 19 и 20 (для статоров). При этом следует иметь в виду, что, поскольку вращаются как роторы, так и статоры, то электропитание электрических двигателей 13 и 14 должно осуществляться через токоприемники в виде кольцевых вращающихся электродов со щетками-токосъемниками, закрепленными на платформе системы 10, а кольцевые электроды должны располагаться на фланце, закрепленном на вращающемся статоре каждого из электрических двигателей. Эта конструкция очевидна и не представлена на фиг.2 для простоты рассмотрения.
Вторая задача - создание ВТО внутри замкнутой консервативной системы, выполненной благодаря использованию точечного торможения эксцентриков 1 и 2 электромагнитными тормозными приводами 5 и 6, жестко закрепленными на дисках этих эксцентриков и обращенных магнитными полюсами друг к другу на минимально возможном расстоянии для увеличения магнитосцепления при подаче в обмотки электромагнитов импульсов тока от генератора импульсов 7. Использование других видов торможения, например механическим введением в нужный момент времени упругого стопора между дисками эксцентриков без связи этого стопора с корпусом системы 11, как это ранее предложено автором заявляемого технического решения, целесообразно из-за необходимости решения задачи увеличения срока службы устройства. Поскольку между дисками эксцентриков 1 и 2 действует тормозящий момент, создаваемый магнитными силами, а не трением скольжения механического упругого стопора, никакого износа частей в заявляемом техническом решении не происходит, а эффективность торможения эксцентриков 1 и 2 определяется лишь конструктивными параметрами электромагнитов электромагнитных тормозных приводов 5 и 6 и мощностью подаваемых на них импульсов от генератора импульсов 7. Кроме того, применение магнитного торможения предпочтительно перед чисто механическим из-за его технологичности и точности выполнения операции торможения. Точность выбора момента торможения определяется совместной работой датчика углового положения эксцентрика 9, установленного, например, у эксцентрика 1, и процессора 8, в котором вычисляется мгновенное значение угловой скорости эксцентриков 1 и 2 по частоте импульсов с датчика углового положения эксцентрика 9 и находится величина временного упреждения подачи на электромагниты электромагнитных тормозных приводов 5 и 6 импульсов тока от генератора импульсов 7 в функции от рассчитанной угловой скорости вращения эксцентриков 1 и 2 с учетом индуктивности указанных электромагнитов, то есть с учетом отставания во времени максимума намагниченности от момента подачи импульса тока в обмотки электромагнитов и их активного сопротивления (здесь прослеживается аналогия с работой системы опережения зажигания в двигателях внутреннего сгорания).
Видоизмененная схема движителей с использованием внутренних сил рассмотрена в работе [7] и использует разделение во времени сил действия и противодействия.
Рассмотрим динамику работы заявляемого устройства.
При подключении электрических двигателей 13 и 14 к источнику питания 21 угловая скорость ω эксцентриков 1 и 2 возрастает по экспоненциальному закону с постоянной времени τ: ω(t)=ωmax[l-ехр(-t/τ)], где ωmax - максимально возможное значение угловой скорости эксцентрика для данного электрического двигателя при заданном моменте трения. В какой-то момент времени угловая скорость эксцентриков достигает величины ω20, как указано на фиг.3б, и в этот момент принимается решение на торможение эксцентриков 1 и 2, когда они займут положение, показанное на фиг.1. то есть когда центры тяжести масс эксцентриков займут положение, при котором векторы их мгновенных количеств движения станут коллинеарными и ортогональными линиям магнитного поля максимально близко связанных между собой электромагнитных тормозных приводов 5 и 6, магнитные полюсы электромагнитов которых становятся взаимно совмещенными. Процесс магнитного торможения эксцентриков длится в течение короткого интервала времени Δt, за который угловая скорость эксцентриков снижается до величины ω2к (см. фиг.3б). При торможении электрические двигатели 13 и 14 отключаются от источника питания 21, а по его окончании вновь включаются, и за время Т - Δt эксцентрики вновь разгоняются до угловой скорости ω20. Далее процесс циклически повторяется с периодом Т, как показано на фиг.3б, при работе генератора импульсов 7 с периодичностью, представленной на фиг.3а.
Свободное вращение статоров относительно роторов в каждом из электрических двигателей приводит к их вращению во взаимно противоположных направлениях под действием одного и того же вращательного момента Mвр=J1ώ1=-J2ώ2, где J1 и J2 - моменты инерции соответственно для статора и ротора (с присоединенными к ним массами) электрического двигателя, а ω1 и ω2 - угловые скорости вращения этих же элементов, разные в общем случае при различии моментов инерции J1 и J2. При этом результирующий момент вращения, передаваемый на корпус системы 11, при разгоне роторов и статоров электрических двигателей отсутствует, так как J1ώ1- J2ώ2=0. Таким образом, в течение времени разгона вращающихся частей электрических двигателей 13 и 14 на корпус системы 11 не сообщается никакого количества движения или момента силы. Учитывая потери на трение между дисками эксцентриков 1 и 2 в процессе их разгона, целесообразно также вводить соответствующий момент трения во вращательное движение статоров, связанных с шестернями 19 и 20 (чтобы увеличить угловую скорость ω20), для чего их можно снабдить центробежным регулятором скорости вращения статоров (не представлен на фиг.2). В противном случае роторы не будут развивать нужной скорости. Оптимальным является случай, когда моменты трения роторов и статоров одинаковы. Функцию регулирования момента трения статоров электрических двигателей 13 и 14 можно также возложить на процессор 8, соответствующий выход которого связывается с управляющим элементом указанного центробежного регулятора или фрикционной муфты (не показаны на фиг.2). Вместо фрикционной можно использовать магнитную муфту регулируемого электрически торможения для задания требуемого момента трения для статоров 16.
Кинетическая энергия эксцентриков перед их торможением равна W1=2J2ω20 2, а после торможения она снижается до W2=2J2ω2к 2. При этом разностная величина энергии ΔW=2J2(ω20 2-ω2к 2) определяет величину импульса силы Fимп (см. фиг.3в) и среднюю силу Fср~FимпΔt/Т, приложенную к системе от ВТО и движущую ее в направлении действия этой силы с ускорением в соответствии со вторым законом Ньютона. Можно показать, что указанная сила выражается через энергию ΔW и параметры устройства согласно выражению Fcp=kΔW/r, где k - некоторый безразмерный коэффициент, определяемый, в частности, конструкцией электромагнитных тормозных приводов 5 и 6 (k= 0,02…0,05), а r - эквивалентный радиус эксцентриков 5 и 6. То обстоятельство, что эквивалентный радиус эксцентрика r входит в этом выражении для Fср в знаменателе совсем не означает желательность уменьшения этого радиуса, поскольку выражение для момента инерции J2 пропорционально квадрату эквивалентного радиуса r. Иначе говоря, с точностью до постоянного множителя сила Fcp прямо пропорциональна массе эксцентриков, их эквивалентному радиусу и разности квадратов угловых скоростей до и после их торможения.
Торможение эксцентриков возникает благодаря действию магнитного сцепления электромагнитных тормозных приводов при совмещении полюсов электромагнитов с током в их обмотках, создаваемым генератором импульсов 7. Магнитное сцепление образует тангенциальную составляющую силы, которая создает момент торможения, и эта сила переменной во времени величины действует в течение отрезка времени Δt. Наибольший эффект торможения возникает, если электромагниты представляют собой П-образные структуры, концы которых обращены кнаружи дисков эксцентриков 1 и 2 и расположены по их боковым граням. Возбуждение их током по полярности подключения должно отвечать условию взаимного притяжения магнитных систем: против магнитного полюса S одного электромагнита должен возникать магнитный полюс N другого. При совмещении полюсов обоих электромагнитов П-образной структуры образуется единая электромагнитная система О-образной структуры с почти замкнутым магнитопроводом с высокой магнитной проводимостью, что существенно увеличивает тангенциальную составляющую силы торможения и тем самым увеличивает разность угловых скоростей ω20-ω2к.
Заявляемое устройство в системе располагается так, что ВТО совмещается с центром инерции всей системы. Это позволяет управлять направлением движения системы, находящейся, например, в состоянии невесомости. Если в системе используется несколько таких одновременно работающих движителей с ВТО, расположенными вдоль одной прямой, то эта прямая также должна быть совмещена с центром инерции всей системы, и поворот указанной прямой должен осуществляться относительно центра инерции системы. Если же ВТО группы движителей распределены в некотором объеме, следует рассчитать геометрический центр всех ВТО и совместить его с центром инерции системы. Для изменения направления движения системы всю группу движителей можно поместить в карданов подвес, укрепленный в корпусе системы 11, который необходимо снабдить угломестным и азимутальным приводами и угловыми датчиками для организации движения в любом направлении в пространстве. Так строится образ НЛО летающей «тарелки» без реактивной тяги.
При смещении ВТО относительно центра инерции системы последняя будет испытывать движение по криволинейной траектории, что может быть использовано в космических аппаратах при их маневрировании.
Рассматриваемый тип движителя можно использовать и в земных условиях для движения транспортных средств. Интересной особенностью таких средств перемещения является их независимость от коэффициента трения поверхности. На таких транспортных средствах разгоняться быстрее на льду, чем на асфальте, так как колеса такого транспорта не связаны с их двигателями, как в обычных автомобилях. Торможение на льду также эффективно с помощью реверса тяги движителя его разворотом на 180° в кардановом подвесе, хотя могут использоваться и традиционные тормозные системы на колеса.
Промышленные образцы таких движителей должны быть снабжены системами смазки трущихся частей (шестерен, подшипников и т.д.) для увеличения ресурса их действия.
Электропитание может быть обеспечено использованием аккумуляторных батарей достаточной энергоемкости с их автономным подзарядом от солнечных батарей применительно к космическим аппаратам или от зарядных сетевых устройств применительно к наземному транспорту.
Снижение вибраций в движителях достигается демпфированием пружинами 12 (фиг.1). При объединении нескольких движителей следует предусмотреть их периодически поочередную работу, что в N раз повысит частоту действующих на систему импульсов силы, то есть снизит вибрации от их действия (здесь N - число движителей). Система организации периодической поочередной работы нескольких движителей рассматриваемого типа потребует взаимной фазировки угловых положений эксцентриков в рабочем состоянии, что является достаточно сложной задачей, связанной с применением систем автоматической подстройки для каждого из движителей с общим процессором управления. Разработка такой схемы является самостоятельной технической задачей и выходит за рамки данного технического решения.
Более простым решением задачи объединения нескольких движителей с их периодической поочередной работой является замена эксцентриков 1 и 2 на обычные диски, центр тяжести которых находится на оси вращения дисков. Эффективность работы такого типа движителей с дисками вместо эксцентриков несколько хуже, но при этом резко упрощается конструкция как отдельно взятого движителя, так и совокупности таких движителей, работающих периодически поочередно. Замену эксцентриков на диски следует рассматривать как вариант модернизации заявляемого технического решения. Нужно отметить, что при выборе достаточно большого числа N движителей их совокупная вибрация может быть соизмерима с частотой вращения эксцентриков 1 и 2, то есть может быть практически незаметной для системы и ее обитателей. Интересно также указать, что передние пружины 12 в направлении действия внутренней силы в среднем сжаты несколько сильнее, чем задние пружины, и эта разностная средняя сила сжатия передних и задних пружин 12 как раз и равна средней силе Fcp, приложенной со стороны платформы системы 10 к корпусу системы 11.
Обеспечение периодически поочередной работы такого модернизированного устройства из N движителей на дисках показано на фиг.4. Генератор тактовых импульсов 24 вырабатывает синхроимпульсы с частотой fсин=N/T, которые поступают на вход пересчетной схемы 25 с коэффициентом пересчета, равным N. Выходные разряды пересчетной схемы 25 подключены к входам дешифратора 26 с N выходами, на которых формируются последовательно управляющие импульсы запуска импульсных генераторов 7 (фиг.1) всех N движителей. При этом моменты включения электромагнитных тормозных приводов каждого из движителей задаются только указанным дешифратором 26, то есть не требуется применение датчика углового положения эксцентрика 9 и процессора 8 в каждом из движителей на дисках, что существенно упрощает их конструкцию.
Рассмотрим пример. Пусть масса эксцентрика m=1 кг, эквивалентный радиус эксцентрика r=0,1 м, средняя частота вращения эксцентриков (ω20-ω2к)/4π=50 об/сек, число однотипных движителей N=32. Тогда при оптимальной компоновке совокупного движителя массой около 160 кг и объемом 200 дм3 можно получить среднюю тягу Fcp∑=3000 Н. При полной массе системы Мс - 1 т достигается ускорение а - 3 м/с2, и, следовательно, система может быть разогнана до скорости 100 км/час за время 9,3 с, что для наземного транспорта является вполне приемлемой величиной. Интересно отметить, что тяга этого движителя такова, что сам себя он мог бы перемещать с ускорением около 2g.
Заявляемое техническое решение отвечает критериям новизны, наличия изобретательского уровня и промышленной применимости, развивает основы теоретической механики, открывает новые возможности для будущих длительных космических экспедиций.
Литература
1. Мещерский И.В. Работы по механике тел переменной массы, 2 изд., М., 1952.
2. Акуленко Л.Д. Асимптотические методы оптимального управления. М., 1987.3. Хайкин С.Э., Физические основы механики. ГИФМЛ, М., 1963. с.113-114.
4. Тарг С.М. Краткий курс теоретической механики. М.: изд. «Высшая школа», изд.12, 1988, с.276-277.
5. Политехнический словарь, изд.3, М.: «Советская энциклопедия», 1989. с.446.
6. Меньших О.Ф. Устройство преобразования энергии вращательного движения в поступательное. Патент РФ №2304340, опубл. в бюл. №22 от 10.08.2007.
7. Меньших О.Ф. Электромагнитный шаговый движитель. Патент РФ №2409885, опубл. в бюл. №2 от 20.01.2011.
Источники патентной информации
RU 2267857 С2, 10.01.2006.
RU 2182259 С2, 10.05.2002.
RU 2172053 С2, 10.08.2001.
RU 2213803 С1, 20.05.1997.
RU 2034170 C1, 30.04.1995.
SU 1751389 А1, 30.07.1992.
SU 1601733 А1, 23.10.1990.
SU 1335930 А1, 07.09.1987.
SU 560301 А, 30.05.1977.
DE 1230365 А, 08.12.1966.
FR 2608689 А, 24.06.1988.
FR 2101562 А, 31.03.1972.
FR 1090564 А, 31.03.1955.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2006 |
|
RU2304340C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИЖИТЕЛЬ | 2010 |
|
RU2409885C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ВЯЗКОСТИ ФЕРРОМАГНЕТИКОВ | 2007 |
|
RU2338216C1 |
| СПОСОБ СОЗДАНИЯ ВИХРЕВОГО МАГНИТНОГО ПОЛЯ | 2008 |
|
RU2364969C1 |
| ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 2014 |
|
RU2556642C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОГЕНЕРАТОРОМ | 2013 |
|
RU2537394C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ МАГНИТНОГО ПОЛЯ ПРИ ВЗАИМНОМ ПЕРЕМЕЩЕНИИ МАГНИТНЫХ ПОЛЮСОВ | 2014 |
|
RU2568659C1 |
| ПРИБОР ДЛЯ ПРОВЕРКИ МАГНИТНОГО СЦЕПЛЕНИЯ | 2013 |
|
RU2537051C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2502183C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОГЕНЕРАТОРОМ | 2010 |
|
RU2444802C1 |
Изобретение относится к области электротехники, электромеханики и систем автоматического управления и может найти применение при построении замкнутых аппаратов, движение которых осуществляется без расходования реактивных масс, выбрасываемых наружу, как в ракетах, или за счет фактора трения, как это характерно для автомобилей, кораблей, вертолетов и т.д. Предложенное устройство преобразования энергии вращательного движения в поступательное содержит два электрических двигателя, роторы и статоры которых свободно вращаются соответственно на двух осях, статоры двух электрических двигателей осесимметрично жестко связаны соответственно с парой дисков с постоянным механическим зацеплением между ними. Роторы двигателей механически связаны с дисками-эксцентриками с размещенными на них диаметрально противоположно центру сосредоточения масс эксцентриков электромагнитных тормозных приводов, включаемых в моменты времени, когда векторы количества движения обоих эксцентриков коллинеарны и совпадают с вектором возникающей внутри системы силы, передаваемой через оси вращения эксцентриков к системе для ее движения в направлении действия этой силы, статоры двигателей имеют одинаковые с роторами моменты инерции с учетом присоединенных к роторам и статорам масс и моменты трения, кроме того, устройство содержит последовательно включенные датчик углового положения эксцентрика, процессор и генератор импульсов, выход которого подсоединен к обмоткам электромагнитных тормозных приводов и к управляющему входу источника питания электрических двигателей. Технический результат - повышение надежности и срока действия устройства. 4 ил.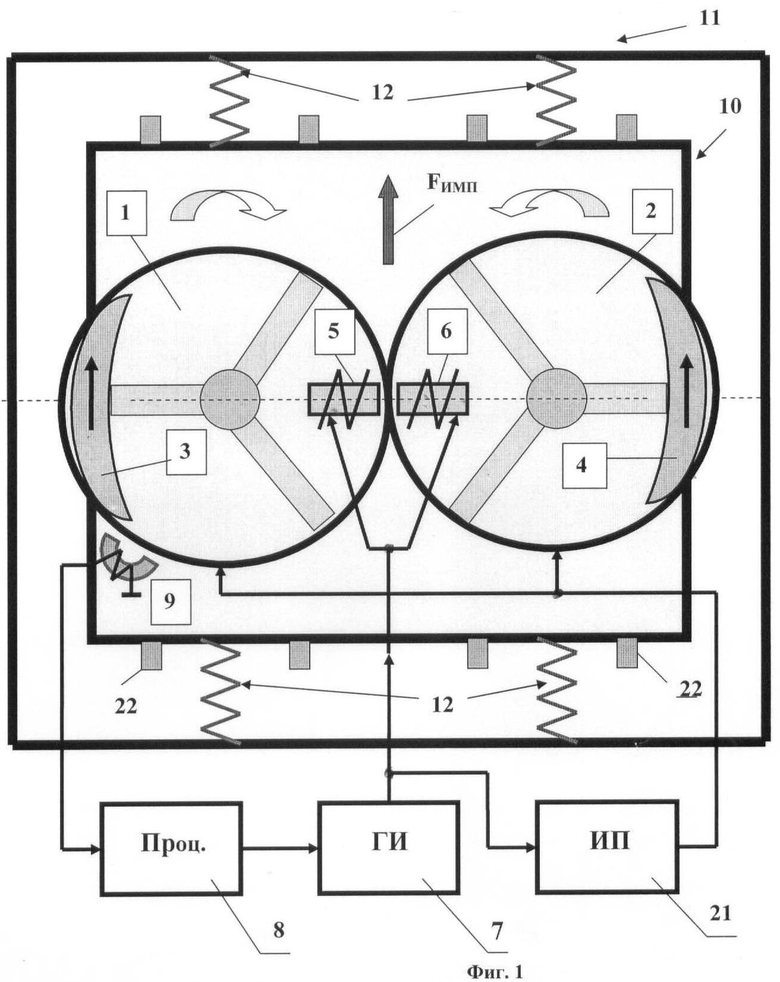
Устройство преобразования энергии вращательного движения в поступательное, содержащее два электрических двигателя, роторы и статоры которых свободно вращаются соответственно на двух осях, статоры двух электрических двигателей осесимметрично жестко связаны соответственно с парой дисков с постоянным механическим зацеплением между ними, отличающееся тем, что роторы двигателей механически связаны с дисками-эксцентриками с размещенными на них диаметрально противоположно центру сосредоточения масс эксцентриков электромагнитных тормозных приводов, включаемых в моменты времени, когда векторы количества движения обоих эксцентриков коллинеарны и совпадают с вектором возникающей внутри системы силы, передаваемой через оси вращения эксцентриков к системе для ее движения в направлении действия этой силы, статоры двигателей имеют одинаковые с роторами моменты инерции с учетом присоединенных к роторам и статорам масс и моменты трения, кроме того, устройство содержит последовательно включенные датчик углового положения эксцентрика, процессор и генератор импульсов, выход которого подсоединен к обмоткам электромагнитных тормозных приводов и к управляющему входу источника питания электрических двигателей.

