Изобретение относится к области механики и может быть использовано в качестве движителя в консервативных механических системах, снабженных источником энергии, например, для организации движения автономных космических аппаратов без изменения их массы.
Известно использование реактивной тяги для организации движения автономных аппаратов в космическом пространстве (см. Политехнический словарь, изд.3, М., «Советская энциклопедия», 1989, с.446). Принцип действия реактивных двигателей основан на выбрасывании массы сгорающего топлива с большой скоростью в направлении, противоположном вектору скорости космических аппаратов, и при этом масса последних уменьшается. Запас хода в аппаратах с реактивными двигателями определяется количеством запасенного топлива. Это ограничивает возможности длительных полетов без дозаправки.
В космическом пространстве можно использовать энергию солнечной радиации, получаемую от солнечных батарей, работающих на основе фотоэлектрического эффекта в полупроводниковых диодных сборках. Однако электрическая энергия не может быть непосредственно использована для целей движения, например, с помощью электродвигателей в космическом пространстве, где отсутствует неподвижная среда, от которой можно было бы «оттолкнуться», как это имеет место в наземных электрокарах. Перемещение в космическом пространстве при существующем уровне техники предполагает выбрасывание с достаточно большой скоростью некоторых масс, что согласно закона сохранения импульса приводит в поступательное перемещение космический аппарат. Когда все, что можно было выбросить за его пределы, закончится, дальнейшие маневры аппарата становятся невозможными.
Известно, что полный импульс замкнутой механической системы тел есть величина постоянная, то есть внутренними силами замкнутой системы невозможно обеспечить перемещение ее центра масс (см. Хайкин С.Э., Физические основы механики, ГИФМЛ, М., 1963, с.113-114, а также Тарг С.М., Краткий курс теоретической механики, М., изд. «Высшая школа», изд.12, 1988, с.276-277).
Аналогов заявляемого технического решения не существует.
Целью изобретения является преобразование энергии вращательного движения масс в консервативной системе в ее поступательное перемещение под действием внутренних сил без изменения полной массы системы.
Указанная цель достигается в устройстве, состоящем из двух электрических двигателей, роторы и статоры которых свободно вращаются соответственно на двух осях, жестко закрепленных на раздвигающихся по направляющим корпуса системы основаниям осей, связанным между собой стягивающими пружинами, статоры двух электрических двигателей осесимметрично жестко связаны соответственно с парой дисков с постоянным механическим контактом между ними под действием указанных стягивающих пружин, и тормозного клина с приводом тормозного клина для периодического введения последнего между указанными дисками, привод тормозного клина электрически связан с силовым выходом генератора импульсов, при этом электрические двигатели подключены к источнику электрического тока соответственно через два коммутатора, управляющие входы которых включены ко второму выходу генератора импульсов, а подключение двух электрических двигателей к источнику электрического тока выполнено так, что их статоры вращаются во взаимно противоположных направлениях.
Поставленная цель достигается в заявляемом техническом решении благодаря тому, что в течение времени разгона роторов и статоров двух электрических двигателей на корпус системы не передается силовой импульс, поскольку роторы и статоры вращаются во взаимно противоположных направлениях с одинаковыми по модулю вращающими моментами, и это обеспечивается свободной связью (через подшипники) роторов и статоров с их соответствующими осями, а в течение времени, когда с помощью тормозного клина, периодически вводимого между двумя дисками приводом тормозного клина, указанные диски раздвигаются тормозным клином, преодолевая силу стягивающих основания осей пружин, статоры электрических двигателей и связанные с ними диски, тормозимые в точках их соприкосновения с тормозным клином, передают импульсы силы на оси, а через их основания, связанные с направляющими корпуса системы, на сам корпус системы благодаря инерции не тормозимых частей вращающихся статоров с дисками и в направлении, ортогональном направляющим корпуса системы. Иначе говоря, в системе возникают только однонаправленные импульсы в период времени торможения статоров с дисками, эффективность которого определяется жесткостью стягивающей основания осей пружины, поперечным размером тормозного клина, раздвигающего диски, и коэффициентом трения между дисками и тормозным клином, затягиваемым вращающимися дисками с последующим выходом тормозного клина с другой стороны от точки контакта дисков между собой.
Заявляемое устройство и его работа будут понятны из рассмотрения представленных схематических чертежей.
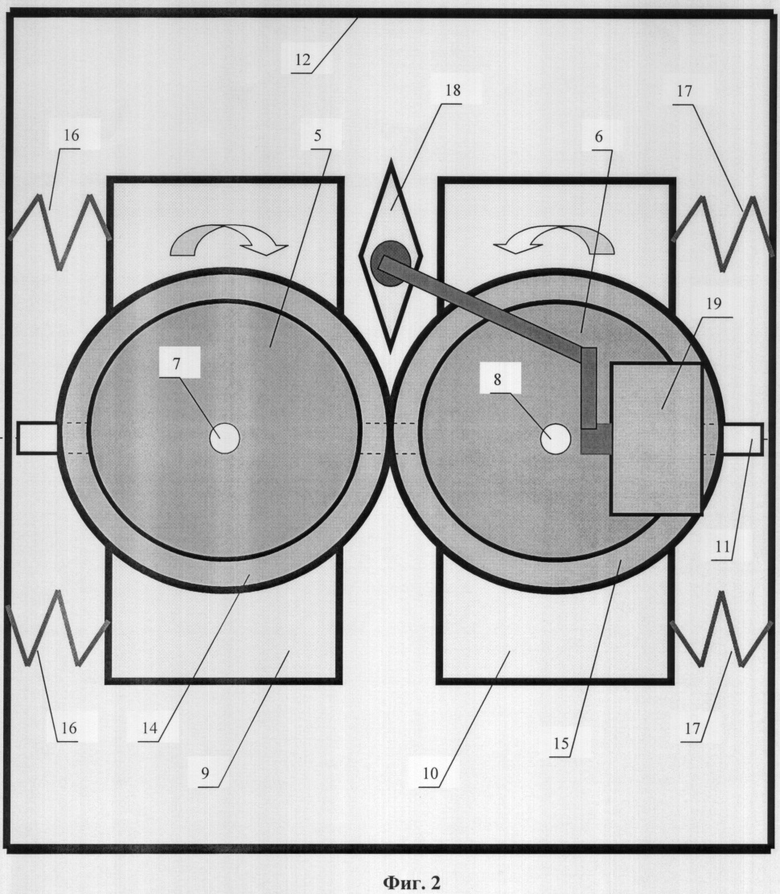
На фиг.1 представлен вид сбоку на механическую конструкцию заявляемого устройства в разрезе, а на фиг.2 - вид на него сверху. На фиг.3 даны временные диаграммы работы устройства. На фиг.4 изображена блок-схема модифицированного устройства с несколькими устройствами рассматриваемого типа с их поочередным действием, обеспечивающая повышение плавности движения системы за счет многократного увеличения частоты следования импульсов действия на систему.
Заявляемое устройство (фиг.1) состоит из двух электрических двигателей 1 и 2, роторы 3 и 4, а также статоры 5 и 6 которых свободно вращаются на двух осях 7 и 8, жестко закрепленных на основаниях осей 9 и 10, механически связанных с направляющими корпуса системы 11, жестко связанными с корпусом системы 12. Свободное вращение роторов и статоров электрических двигателей относительно их осей обусловлено установкой на указанных осях подшипников 13. Статоры 5 и 6 механически осесимметрично связаны с дисками 14 и 15, находящимися в постоянном контакте между собой благодаря стягивающим пружинам 16 и 17, концы которых закреплены с основаниями осей 9 и 10. Для периодического торможения быстро раскрученных статоров 5 и 6 с дисками 14 и 15 использован тормозной клин 18, вводимый в область контакта дисков 14 и 15 и втягиваемый ими под действием силы трения между дисками 14 и 15 и тормозным клином 18 с учетом силы стягивания оснований осей 9 и 10 стягивающими пружинами 16 и 17. Тормозной клин 18 вводится между дисками 14 и 15 периодически с помощью механического привода тормозного клина 19, управляемого от силового выхода генератора импульсов 20. При этом электрические двигатели 1 и 2 соединены с источником электрического тока 21 через коммутаторы 22 и 23, управляющие входы которых соединены со вторым выходом генератора импульсов 20, а соединения указанных электрических двигателей с источником электрического тока 21 выполнены так, что их статоры 5 и 6 вращаются во взаимно противоположных направлениях. На фиг.2 видно, что основания осей 9 и 10, имеющие возможность возвратно-поступательного движения вдоль направляющей корпуса системы 11, имеющей, например, форму типа «ласточкиного хвоста», механически связаны с корпусом системы 12 и передают на него импульсы силы, приложенные к осям 7 и 8 во время торможения дисков 14 и 15.
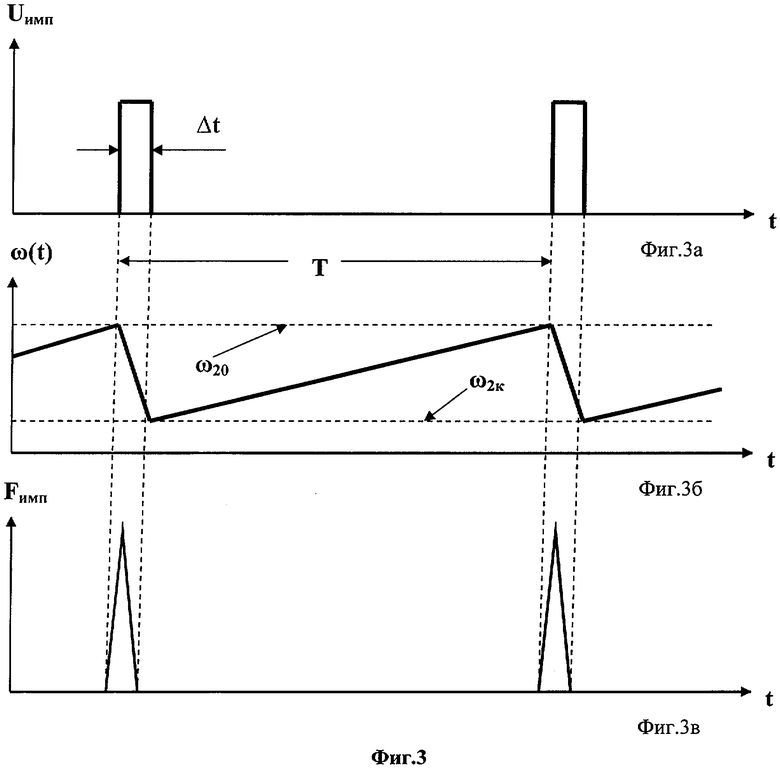
На фиг.3 представлены временные диаграммы действия устройства. На фиг.3а дана временная диаграмма работы генератора импульсов 20, управляющего по его силовому выходу включением привода тормозного клина 19, а также управляющего по его второму выходу выключением двух электрических двигателей 1 и 2 от источника электрического тока 21 с помощью коммутаторов 22 и 23 в течение времени торможения дисков 14 и 15 (и статоров 5 и 6). На фиг.3б представлена временная диаграмма разгона-торможения статоров 5 и 6 двух электрических двигателей 1 и 2. На фиг.3в показано действие на корпус системы 12 однонаправленных импульсов силы, вызывающих поступательное перемещение в пространстве корпуса системы 12, являющейся консервативной системой.
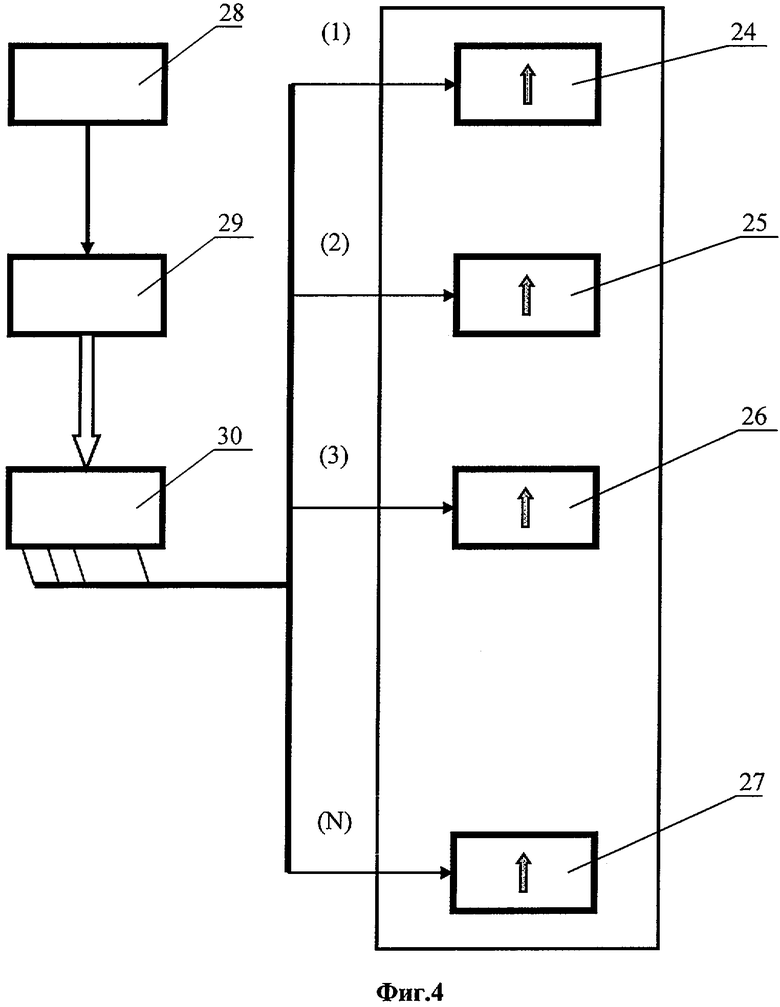
На фиг.4 показана блок-схема организации более плавного движения корпуса системы 12 путем использования нескольких идентичных устройств, работающих поочередно, что повышает частоту следования импульсов силы, прикладываемых к корпусу системы 12. Такое модернизированное устройство содержит N рассмотренных выше устройств 24, 25, 26, ... 27, связанных с общим для них синхрогенератором импульсов 28 с N-кратно повышенной частотой следования импульсов по сравнению с частотой следования импульсов в генераторах импульсов 20 (фиг.1) через последовательно связанные пересчетную схему 29 и дешифратор 30, N выходов которого подключены к синхровходам соответствующих N генераторов импульсов 20.
Рассмотрим действие заявляемого устройства.
Важным обстоятельством при рассмотрении работы заявляемого технического решения является указание на отсутствие импульса силы или количества движения, оказываемого на консервативную систему - корпус системы 12 - при разгоне роторов и статоров двух электрических двигателей 1 и 2. Это связано с тем, что роторы 3 и 4 и статоры 5 и 6 свободно вращаются относительно их неподвижных по вращению осей 7 и 8 через подшипники 13. Свободное вращение статоров относительно роторов в каждом из электрических двигателей приводит к их вращению во взаимно противоположных направлениях под действием одного и того же вращательного момента  , где J1 и J2 - моменты инерции соответственно для ротора и статора (с присоединенной к нему массой диска) электрического двигателя, a ω1 и ω2 - угловые скорости вращения тех же элементов, разные в общем случае при различии моментов инерции J1 и J2. При этом результирующий момент вращения, передаваемый на корпус системы 12, при разгоне роторов и статоров электрических двигателей отсутствует, так как
, где J1 и J2 - моменты инерции соответственно для ротора и статора (с присоединенной к нему массой диска) электрического двигателя, a ω1 и ω2 - угловые скорости вращения тех же элементов, разные в общем случае при различии моментов инерции J1 и J2. При этом результирующий момент вращения, передаваемый на корпус системы 12, при разгоне роторов и статоров электрических двигателей отсутствует, так как  . Таким образом, в течение времени разгона вращающихся частей двигателей 1 и 2 на корпус системы 12 не сообщается никакого количества движения или момента силы. Обозначим указанное время разгона через Т-Δt, где Т - период следования импульсов от генератора импульсов 20, определяющий цикличность работы устройства; Δt - отрезок времени, в течение которого включен привод тормозного клина 19 и последний проходит между дисками 14 и 15, то есть происходит торможение дисков 14 и 15, и отключены электрические двигатели 1 и 2 от источника электрического тока 21 с помощью коммутаторов 22 и 23. Эти величины указаны на фиг.3а. Изменение угловой скорости вращения статоров 5 и 6 двигателей 1 и 2 записывается как: ω2(t)=ω2max[1-ехр(-t/τ)], где ω2max - наибольшая возможная угловая скорость вращения статоров электрических двигателей с присоединенными к ним массами дисков 14 и 15, τ - постоянная времени разгона статоров 5 и 6 электрических двигателей 1 и 2 вместе с присоединенными массами дисков 14 и 15. Тогда за время разгона Т-Δt угловая скорость статоров достигнет величины ω20=ω2max{1-exp[-(T-Δt)/τ]}, указанной на фиг.3б. К концу торможения дисков 14 и 15 введением между ними тормозного клина 18 угловая скорость статоров 5 и 6 уменьшается до конечной величины ω2к<ω20, также указанной на фиг.3б. В течение времени Δt действуют импульсы силы на корпус системы 12, показанные на фиг.3в, их величина соизмерима с разностью квадратов угловых скоростей ω20 2-ω2к 2 для начального и конечного значений за время торможения Δt, выражающей изменение кинетической энергии вращающихся статоров 5 и 6 с присоединенными к ним дисками 14 и 15.
. Таким образом, в течение времени разгона вращающихся частей двигателей 1 и 2 на корпус системы 12 не сообщается никакого количества движения или момента силы. Обозначим указанное время разгона через Т-Δt, где Т - период следования импульсов от генератора импульсов 20, определяющий цикличность работы устройства; Δt - отрезок времени, в течение которого включен привод тормозного клина 19 и последний проходит между дисками 14 и 15, то есть происходит торможение дисков 14 и 15, и отключены электрические двигатели 1 и 2 от источника электрического тока 21 с помощью коммутаторов 22 и 23. Эти величины указаны на фиг.3а. Изменение угловой скорости вращения статоров 5 и 6 двигателей 1 и 2 записывается как: ω2(t)=ω2max[1-ехр(-t/τ)], где ω2max - наибольшая возможная угловая скорость вращения статоров электрических двигателей с присоединенными к ним массами дисков 14 и 15, τ - постоянная времени разгона статоров 5 и 6 электрических двигателей 1 и 2 вместе с присоединенными массами дисков 14 и 15. Тогда за время разгона Т-Δt угловая скорость статоров достигнет величины ω20=ω2max{1-exp[-(T-Δt)/τ]}, указанной на фиг.3б. К концу торможения дисков 14 и 15 введением между ними тормозного клина 18 угловая скорость статоров 5 и 6 уменьшается до конечной величины ω2к<ω20, также указанной на фиг.3б. В течение времени Δt действуют импульсы силы на корпус системы 12, показанные на фиг.3в, их величина соизмерима с разностью квадратов угловых скоростей ω20 2-ω2к 2 для начального и конечного значений за время торможения Δt, выражающей изменение кинетической энергии вращающихся статоров 5 и 6 с присоединенными к ним дисками 14 и 15.
Полагая массу статора с диском равной m, радиус эквивалентного диска равным r, кинетическая энергия одного такого эквивалентного диска равна W1=mω2r2/2, так что полная энергия вращения двух эквивалентных дисков перед их торможением при ω=ω20 равна W0=mω20 2r2. После окончания торможения дисков 14 и 15 тормозным клином 18 полная кинетическая энергия снижается до величины Wк=mω2к 2r2. Следовательно, изменение полной кинетической энергии вращательного движения равно ΔW=mr2(ω20 2-ω2к 2), и эта величина превращается в тепловую энергию Q и энергию поступательного движения консервативной системы Wпост=ΔW-Q=ηmr2(ω20 2-ω2к 2), где η - к.п.д преобразования вращательного движения в поступательное. Мощность поступательного движения системы N=Wпост/Т при сопутствующем теплоизлучении dQ/dt=Q/Т.
Если тормозной клин 18 имеет профиль в форме ромба с углом при его вершине γ, равным γ=2arctg(d/l), где d/l - отношение длин диагоналей ромба - короткой к длинной, вводимым между дисками 14 и 15 приводом тормозного клина 19, легко показать, что сила трения между дисками 14 и 15 и тормозным клином 18 в форме ромба при коэффициенте трения между указанными объектами αтр изменяется равномерно по мере прохождения тормозного клина 18 через раздвигаемые им диски 14 и 15 на максимальное расстояние, равное d, от нуля до максимальной величины Fтр. max=αтрkl/4cosγ/2, где k - совокупная жесткость стягивающих пружин 16 и 17, связывающих основания осей 9 и 10 или, что то же, диски 14 и 15. Принимая среднюю величину силы трения, равной Fтр. ср=Fтр. max/2, за время торможения Δt при средней угловой скорости дисков 14 и 15 ω2 ср=(ω20+ω2к)/2, имеем путь торможения ST=ω2 cprΔt, и тогда выделившаяся тепловая энергия Q находится как Q=αтрkl(ω20+ω2к)rΔt/8cosγ/2. По закону сохранения энергии, пренебрегая потерями энергии на деформацию и потери в стягивающих пружинах 16 и 17, энергия поступательного движения находится из выражения:

Физический смысл преобразования энергии вращательного движения в энергию поступательного состоит в том, что при заклинивании (торможении) дисков в точке их соединения между собой инерция масс дисков передается на их оси 7 и 8, а от них к центру инерции корпуса системы 12. Коэффициент полезного преобразования η согласно (1) равен:


Важно указать, что значение угловой скорости ω2к в конце промежутка времени Δt существенно зависит от параметра жесткости k стягивающих пружин 16 и 17, коэффициента трения αтр и ширины d=ltg(γ/2) тормозного клина 18. Кроме того, важное значение для эффективного торможения имеет сама форма тормозного клина 18. Поэтому конкретное решение о выборе указанных параметров основано на совокупном рассмотрении задачи с учетом параметров двигателей 1 и 2, в частности, постоянной времени τ разгона статоров 5 и 6 с присоединенными к ним массами дисков 14 и 15.
Отметим, что при торможении дисков 14 и 15 тормозным клином 18 роторы 3 и 4 электрических двигателей 1 и 2 продолжают свободно вращаться на осях 7 и 8 при выключенном питании электрических двигателей коммутаторами 22 и 23. После завершения этапа торможения электрические двигатели 1 и 2 вновь подключаются к источнику электрического тока 21, и цикл разгона статоров 5 и 6 с дисками 14 и 15 повторяется. Частота следования импульсов силы, передаваемых корпусу системы 12, равна Fимп=1/Т.
При равнозамедленном торможении дисков 14 и 15 с модулем ускорения εт=(ω20-ω2к)/Δt к.п.д. преобразования энергии вращательного движения в энергию поступательного согласно (2) равен η=1-[αтрkl/8cos(γ/2)mεтr], и растет с ростом массогабаритных параметров эквивалентных дисков и способности их к эффективному торможению тормозным клином 18 без эффекта пробуксовки дисков 14 и 15 на гранях тормозного клина 18. Последнее обеспечивается уменьшением угла γ при вершине ромбического тормозного клина. Возможны и иные формы тормозного клина 18 (с плавной огибающей).
Поскольку торможение εт впрямую зависит от произведения αтрk (от коэффициента трения и жесткости стягивающих пружин 16 и 17), то эффективность торможения определяется отношением ξ=αтрk/εт, имеющим размерность массы, и при этом к.п.д. преобразования η=1-[dξ/8sin(γ/2)mr]. Видно, что к.п.д. преобразования растет с увеличением угла γ тормозного клина 18, но при условии отсутствия пробуксовки дисков 14 и 15 на поверхности тормозного клина 18. Следует также отметить целесообразность увеличения радиуса диска r в сравнении с шириной тормозного клина d, раздвигающего диски против сил, создаваемых стягивающими пружинами 16 и 17.
За время Δt тормозной клин должен выйти с другой стороны от точки соприкосновения дисков 14 и 15, и привод тормозного клина 19 переведет последний через время разгона статоров 5 и 6 Т-Δt вновь в первоначальное положение, например, путем поворота тормозного клина 18 на поворотном рычаге привода тормозного клина 19 (фиг.2).
Работа привода тормозного клина 19 синхронизируется от генератора импульсов 20, его силовой выход приводит во вращательное движение рычаг привода тормозного клина 19 с периодом повторения Т. Как указывалось выше, в течение времени Δt электрические двигатели 1 и 2 с помощью коммутаторов 22 и 23, управляемых со второго выхода генератора импульсов 20, отключаются от источника электрического тока 21, хотя при этом роторы 3 и 4 электрических двигателей 1 и 2 продолжают свободно вращаться по инерции на осях 7 и 8. Последующее включение электрических двигателей 1 и 2 к источнику электрического тока 21 вновь создают равные и противоположно направленные вращающие моменты, приложенные к роторам и статорам электрических двигателей, не создавая какой-либо реакции на корпус системы 12. Это обусловливает действие на корпус системы 12 однонаправленных импульсов (фиг.3в), приводящих консервативную систему в поступательное движение, обусловленное действием ее внутренних сил.
Учитывая потери на трение между дисками 14 и 15 в процессе разгона статоров 5 и 6 двигателей 1 и 2, возникающие в связи с действием стягивающих пружин 16 и 17, целесообразно также вводить соответствующий момент трения во вращательное движение роторов 3 и 4 (чтобы увеличить угловую скорость ω20 при разгоне статоров), для чего их можно также связать, например, шестеренчатой парой и центробежным регулятором скорости вращения роторов. В противном случае статоры 5 и 6 не будут развивать нужной скорости. Оптимальным является случай, когда моменты трения роторов и статоров одинаковы.
Поскольку период следования импульсов сил Т довольно велик, то для повышения плавности поступательного движения консервативной системы следует рекомендовать использование N устройств рассмотренного типа, работающих периодически поочередно, импульсы действия которых коллинеарны, например, расположены на одной прямой, проходящей через центр инерции системы, как это показано на фиг.4. Для обеспечения поочередной работы таких элементарных движителей 24, 25, 26, ... 27 в модернизированной схеме используется синхрогенератор 28, частота следования импульсов в котором равна FСГ=N/Т, выход которого подключен к пересчетной схеме 29 (двоичному счетчику с коэффициентом пересчета N), разрядные выходы которого соединены с дешифратором 30, N выходов которого включены к соответствующим синхровходам генераторов импульсов 20, работающих в ждущем режиме, для всех N элементарных движителей. Это приведет к N-кратному увеличению мощности такого совокупного движителя.
Философский аспект заявляемого технического решения приводит к мысли о необходимости существования феномена движения механических систем сложной внутренней структуры под действием внутренних сил. Действительно, если бы закон сохранения центра инерции мог быть применим абсолютно ко всем космическим объектам в любой момент времени, то, следуя концепции зарождения Вселенной от так называемого «большого взрыва», дислокация центра которого была где-то определена, все остальные составляющие такого «большого взрыва» в виде существующих во Вселенной звезд, планет и других космических объектов, где бы они ни находились в пространстве, должны в целом сохранять свой центр инерции в том же самом его положении, какое он занимал в момент «большого взрыва». Иначе говоря, центр Вселенной является определимым и устойчивым вечно. Но такая точка зрения не признается правильной, из чего следует (доказательством от противного), что возможно самодвижение материи под действием внутренних сил.
То обстоятельство, что быстро закрученное колесо, соприкасаясь с поверхностью дороги, начинает по ней двигаться, это - абсолютно известный факт превращения энергии вращательного движения в поступательное при наличии внешних сил трения вращающегося колеса о дорогу. Торможение вращающегося колеса дорогой в точке соприкосновения колеса с дорогой вызывает появление импульса силы, приложенного к центру инерции колеса, находящемуся на оси колеса. Именно то же самое происходит в заявляемом техническом решении при заклинивании вращающихся встречно дисков 14 и 15 тормозным клином 18, который фактически не связан с корпусом системы 12, то есть не создает силовой реакции на корпус системы, но создает эффект торможения внутри системы. Следовательно, для организации движения консервативной системы под действием ее внутренних сил необходимо лишь создать искусственное трение внутри самой системы, с помощью которого можно «толкать» систему изнутри. Вот именно такой механизм создания «точки опоры» внутри консервативной системы и предложен в заявляемом техническом решении.
Управление положением вектора импульса силы внутри консервативной системы для организации ее маневра возможно путем разворота направляющей корпуса системы 11 относительно корпуса системы 12 (фиг.2). При этом направляющая корпуса системы 11 связана с корпусом системы 12 через соответствующее поворотное устройство, например, с помощью карданового подвеса с угломестным и азимутальным приводами, при условии приложения равнодействующих внутренних сил к центру инерции системы, что позволяет осуществить маневр космического аппарата в любом направлении.
Возможность движения центра инерции консервативной системы под действием ее внутренних сил с сохранением массы системы не противоречит закону сохранения энергии, поскольку на организацию такого движения с ускорением затрачивается энергия от источника, находящегося внутри системы. При этом последняя выбрасывает в окружающее пространство не количество движения, как это имеет место при реактивной тяге в ракетных двигателях, а лишь тепловую энергию. Пополнение энергии в такой системе возможно от посторонних источников, например, с использованием солнечной (звездной) радиации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2011 |
|
RU2468488C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2502183C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ВЯЗКОСТИ ФЕРРОМАГНЕТИКОВ | 2007 |
|
RU2338216C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОГЕНЕРАТОРОМ | 2013 |
|
RU2537394C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОГЕНЕРАТОРОМ | 2010 |
|
RU2444802C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2332778C1 |
| БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2533886C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИЖИТЕЛЬ | 2010 |
|
RU2409885C1 |
| БЕСКОЛЛЕКТОРНЫЙ ДВУХРОТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2531029C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЧАСТОТЫ ГЕНЕРАТОРА | 2007 |
|
RU2368073C2 |
Изобретение относится к электротехнике и может быть использовано в механических системах, снабженных источником энергии, например, для организации движения автономных космических аппаратов без изменения их массы. Технический результат состоит в преобразование энергии вращательного движения масс в поступательное перемещение. Устройство состоит из двух электрических двигателей, роторы и статоры которых свободно вращаются соответственно на двух осях, жестко закрепленных на раздвигающихся по направляющим корпуса системы основаниям осей, связанным между собой стягивающими пружинами. Статоры двух электрических двигателей осесимметрично жестко связаны соответственно с парой дисков с постоянным механическим контактом между ними под действием указанных стягивающих пружин, и тормозного клина с приводом тормозного клина для периодического введения последнего между указанными дисками. Привод тормозного клина электрически связан с силовым выходом генератора импульсов. Электрические двигатели подключены к источнику электрического тока соответственно через два коммутатора, управляющие входы которых включены ко второму выходу генератора импульсов. Подключение двух электрических двигателей к источнику электрического тока выполнено так, что их статоры вращаются во взаимно противоположных направлениях. 4 ил.
Устройство преобразования энергии вращательного движения в поступательное, состоящее из двух электрических двигателей, роторы и статоры которых свободно вращаются соответственно на двух осях, жестко закрепленных на раздвигающихся по направляющим корпуса системы основаниям осей, связанным между собой стягивающими пружинами, статоры двух электрических двигателей осесимметрично жестко связаны соответственно с парой дисков с постоянным механическим контактом между ними под действием указанных стягивающих пружин, и тормозного клина с приводом тормозного клина для периодического введения последнего между указанными дисками, привод тормозного клина электрически связан с силовым выходом генератора импульсов, при этом электрические двигатели подключены к источнику электрического тока соответственно через два коммутатора, управляющие входы которых включены ко второму выходу генератора импульсов, а подключение двух электрических двигателей к источнику электрического тока выполнено так, что их статоры вращаются во взаимно противоположных направлениях.
| СРЕДСТВО ДЛЯ СОЗДАНИЯ ДВИГАТЕЛЯ-МАХОВИКА | 2000 |
|
RU2182259C2 |
| ИНЕРЦИОННЫЙ ЦЕНТРОБЕЖНЫЙ ДВИГАТЕЛЬ | 1993 |
|
RU2034170C1 |
| Импульсный реактивный двигатель | 1989 |
|
SU1751389A1 |
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 25 И 26" (ВАРИАНТЫ) | 2002 |
|
RU2213603C1 |
| ВЕТРОВАЯ АККУМУЛИРУЮЩАЯ ЭЛЕКТРОСТАНЦИЯ | 1995 |
|
RU2101562C1 |
| ИНГАЛЯЦИОННОЕ УСТРОЙСТВО И АППАРАТ ДЛЯ ИНГАЛЯНТА | 2014 |
|
RU2608689C1 |

