Эксцентрическая передача (ЭП) относится к механизмам с попеременно-возвратным горизонтальным и вертикальным движением рабочего органа и может быть использована для реализации транспортного устройства, исполняющего функцию пульсирующего вращающего момента и цилиндрической прецессии рабочего органа для преодоления препятствий (передача неограниченного движения с заданным законом изменения вектора скорости).
Известны механизмы зубчатой, цепной передач [1, с.174, 552].
Указанные устройства имеют нулевой эксцентриситет и, следовательно, не могут быть использованы для реализации транспортного устройства, исполняющего функцию пульсирующего вращающего момента и цилиндрической прецессии рабочего органа, преодолевающего препятствия (например, инвалидная коляска повышенной проходимости, ходовая часть «карабкающегося вездехода»).
Известен кулачковый механизм [1, с.245], кулак которого осуществляет передачу движения с заданным законом изменения скорости, - прототип.
Указанное устройство осуществляет передачу ограниченного движения.
Известны транспортные устройства с попеременно-возвратным горизонтальным и вертикальным движением рабочего органа - механизм шагающего конвейера, транспортный механизм шагающего экскаватора [1, с.559] - прототипы ходовой части «карабкающегося вездехода», шагающего колеса-двигателя.
Указанные устройства не предназначены для мобильного передвижения, не эффективны в качестве рабочего механизма транспортного средства в среде пересеченной местности, конструктивно сложны и нетехнологичны, вследствие чего не получили широкого применения.
Известны муфты [1, с.303] и колеса [1, с.217] передач - прототипы муфты-колеса прецессионной.
Указанные устройства не создают полезной прецессии рабочего органа.
Известен транспортный механизм тельфера [1, с.489] - прототип транспортного механизма «кровельного дворника».
Указанное устройство приспособлено лишь к перемещению по специальным направляющим, не предназначено для перемещения по поверхностям зданий различного наклона и формы.
Известна типовая инвалидная коляска - прототип инвалидной коляски повышенной проходимости, состоит из стандартных частей.
Указанное устройство неприменимо для комфортного преодоления путевых препятствий.
1. ЭКСЦЕНТРИЧЕСКАЯ ПЕРЕДАЧА (ВАРИАНТЫ)
Цель заявленного объекта - устройство, реализующее функцию пульсирующего вращающего момента (ВМ) и цилиндрической прецессии (ЦП - регулярное движение геометрической оси колеса по геометрической цилиндрической поверхности относительно положения ведущего вала, механически связанное с его вращением - ср. прецессия коническая [1, с.388]) рабочего органа механизма (при постоянном ВМ ведущего вала) для плавного преодоления переменной (ступенчатой) механической нагрузки.
Указанная цель достигается тем, что геометрические оси колес основной (определяющей указанную функцию) ступени передачи (эксцентрической колесной пары (ЭКП)) соединены тягой (элементом, ограничивающим межосевое расстояние для обеспечения непрерывности зацепления и предотвращения заклинивания ЭКП), а ведущий и ведомый валы эксцентрично смещены относительно осей на величину, пропорциональную необходимой пульсации ВМ и ЦП ведомого колеса, расстояние между валами равно расстоянию между осями с допуском на механические артефакты - попадание мелких предметов (<<величины зуба колеса) в область зацепления.
Вариант 1: Передача с основной ступенью, выполненной в форме зубчатой ЭКП (фиг.1) с передаточным числом Z=1.
Вариант 2 (фиг.1): Устройство по варианту 1, отличающееся регулируемым эксцентриситетом и пружинной межосевой тягой (компенсирующей артефакты эксцентричного эвольвентного зацепления) основной ступени (Z=N>1/<1).
На фиг.1 показано:
1 - зубчатая ЭКП;
2 - пружинная тяга (компенсатор артефактов открытого зацепления);
3 - механизм управления эксцентриситетом/ограничитель ЦП.
Вариант 3: Устройство по варианту 1, отличающееся тем, что основная ступень выполнена в форме цепной ЭКП (Z=N>1/<1).
Вариант 4 (фиг.2, 3): У-во по варианту 3, с регулируемым эксцентриситетом.
На фиг.2 показано:
4 - цепная ЭКП;
5 - пружинная тяга;
6 - механизм управления эксцентриситетом/ограничитель ЦП.
На фиг.3 показано:
7 - цепная ЭКП;
8 - тяга;
9 - дополнительная звездочка с пружинной тягой;
10 - ведомый вал - вал рабочего органа.
Преимуществами заявленного здесь устройства являются:
- возможность плавного преодоления переменной (ступенчатой) механической нагрузки, позволяющая использовать ЭКП в устройствах, предназначенных для применения в среде, неподготовленной для функционирования типовых механизмов и машин - например, в устройстве инвалидной коляски повышенной проходимости, функционирующей в бытовой среде с препятствиями для ровного хода колесного транспортного средства (со ступеньками и т.п.); «карабкающегося вездехода» (раздел 2);
- отсутствие технологически сложных в изготовлении деталей.
2. ХОДОВАЯ ЧАСТЬ «КАРАБКАЮЩЕГОСЯ ВЕЗДЕХОДА»
Устройство относится к мобильным техническим средствам передвижения и может быть использовано для эффективного преодоления транспортным средством внедорожных препятствий на пути (ям, взгорков и т.п.) с типичной для автомашин скоростью.
Цель заявленного объекта - транспортное техническое средство передвижения, применимое в среде пересеченной местности для эффективного преодоления препятствий данной местности при следовании по данной местности с типичной для автомашин скоростью.
Указанная цель достигается тем, что транспортный механизм устройства с попеременно-возвратным горизонтальным и вертикальным движением рабочего органа выполнен на основе ЭКП (см. раздел 1) и попеременно-возвратной ЦП ведомого колеса ЭКП при постоянном ВМ и фиксированном положении ведущего вала с регулируемым эксцентриситетом; центр тяжести устройства с полезной нагрузкой равноудален от точек опоры устройства на почву и находится ниже полезной нагрузки при дифференте устройства, необходимом для преодоления препятствий на пути, геометрически образуя с наиболее удаленными точками опоры призму с острыми углами в основаниях боковых граней и тупыми в вершине призмы (условие безопасности от опрокидывания при дифференте).
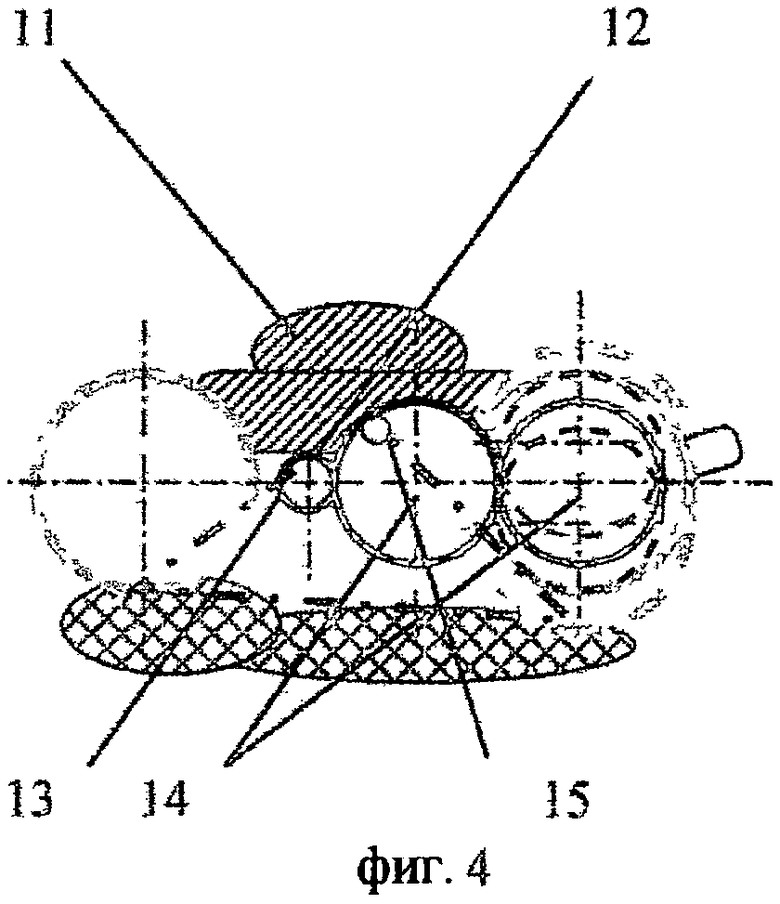
Пример: Ходовая часть «карабкающегося вездехода», предназначенного быть транспортным средством в инопланетных условиях.
На фиг.4 показано:
11 - место полезного груза;
12 - привод;
13 - храповый реверсивный механизм управления приводом;
14 - ЭКП (пунктир - экстремумы прецессии);
15 - схема положения центра тяжести при max эксцентриситета и 0 дифферента.
Пример нетипичного транспортного средства, необходимого в обычных условиях (фиг.5): инвалидная полноприводная коляска повышенной проходимости с автономным электроприводом - питаемым от аккумулятора (основным), ручным приводом (резервным) и самовытягивающей лебедкой (кабестаном [1, с.193] - для случаев затруднений функционирования основного механизма).
На фиг.5 показано:
16 - посадочное место (съемное откидное кресло);
17 - привод;
18 - ЭКП;
19 - схема положения центра тяжести при max эксцентриситета и 0 дифферента.
20 - кабестан.
Преимуществами заявленного здесь устройства являются:
- высокая проходимость, обеспечивающая эффективное преодоление препятствий в среде пересеченной местности;
- сопротивление расторможенного привода спонтанному качению по уклону;
- отсутствие деталей, требующих сложных способов изготовления.
3. САМОДВИЖУЩЕЕ ШАГАЮЩЕЕ КОЛЕСО (ВАРИАНТЫ), применимое в ходовой части «карабкающегося вездехода», «кровельном дворнике», инвалидной коляске повышенной проходимости
Устройство относится к механическим движителям с попеременно-возвратным горизонтальным и вертикальным движением рабочего органа и может быть использовано для реализации транспортного устройства, исполняющего функцию пульсирующего ВМ и ЦП рабочего органа для преодоления препятствий (например, инвалидная коляска повышенной проходимости, ходовая часть «карабкающегося вездехода», «кровельного дворника»).
Цели заявленного объекта: 1) максимально простое устройство движителя, реализующее функцию пульсирующего ВМ и регулярное движение точек рабочей поверхности движителя по квазициклоидным (квазициклоида - кривая качения по непрямой (неплоской) поверхности) траекториям различной амплитуды, механически связанное с его вращением рабочего органа механизма для эффективного преодоления путевых препятствий (неровностей почвы, сугробов, наледей); 2) движение при отсутствии приложения ВМ, приложенного к валу колеса.
Указанные цели достигаются тем, что 1) рабочая поверхность движителя - колеса - имеет некруглую форму; 2) форма колеса регулируемая.
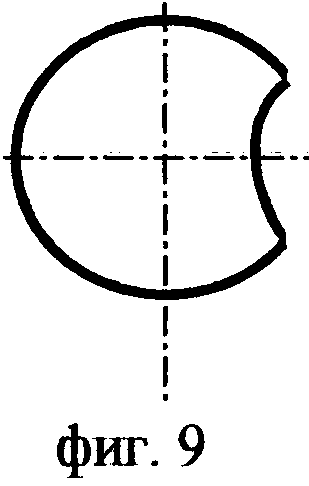
Вариант 1 (фиг.6, 7, 8): рабочая поверхность движителя - колеса - имеет (в боковой проекции) форму усеченной окружности.
Вариант 2 (фиг.9): Устройство по варианту 1, отличающееся кривыми сегментами усечения окружности рабочей поверхности.
Вариант 3 (фиг.10): Устройство по вар.1, 2, отличающееся округлениями сопряжений окружности и сегментов усечения.
Вариант 4 (фиг.11, 12): Устройство по вар.2, 3, отличающееся наличием узла перманентной динамичной регулировки (25, 29, 33) кривизны рабочей поверхности (узла выдвижения сегментов (22) - пример 1, узла изменения формы сегментов (27, 30, 31) - примеры 2, 3).
Пример 1 варианта 4 схематически представлен на фиг.11:
22 - выдвижной сегмент (пунктир - пределы хода сегмента);
23 - часть рабочей поверхности постоянной формы;
24 - выдвигающая пружина;
25 - регулятор выдвижения сегмента.
Пример 2 варианта 4 схематически представлен на фиг.12:
26 - часть рабочей поверхности постоянной формы;
27 - пневматически (либо гидравлически) регулируемые сегменты (пунктир - пределы регулировки формы сегментов);
28 - остов колеса;
29 - регулятор давления в узле изменения формы сегментов.
Пример 3 (с двухуровневой регулировкой формы сегментов) варианта 4 схематически представлен на фиг.13:
30 - пневматически (либо гидравлически) регулируемые сегменты первого уровня (пунктир - пределы регулировки формы сегментов);
31 - пневматически (либо гидравлически) регулируемые сегменты второго уровня;
32 - круглый остов колеса;
33 - регуляторы давления в узле изменения формы сегментов.
Преимуществами заявленного являются:
- возможность эффективного преодоления путевых препятствий любой формы в среде, неподготовленной для функционирования типовых механизмов и машин;
- возможность движения без приложения ВМ к валу колеса - самодвижущее шагающее колесо (СШК).
4. МУФТА-КОЛЕСО ПРЕЦЕССИОННАЯ переменного продольного позиционирования для «кровельного дворника», применимая в инвалидной коляске повышенной проходимости
Устройство относится к механическим передачам вращающего момента и может быть использовано для механизации трудоемких операций.
Цель заявленного объекта - комбинированная механическая передача (совмещающая в одной детали полезные качества трех - муфты, колеса и втулки продольного скольжения вала), создающая полезную прецессию (отклонение от кругового вращения) рабочего органа, ограниченно добавляющую ему две поступательных степени свободы (продольную - управляемого перемещения его на заданное расстояние и поперечную - вибрации) к основной - вращательной.
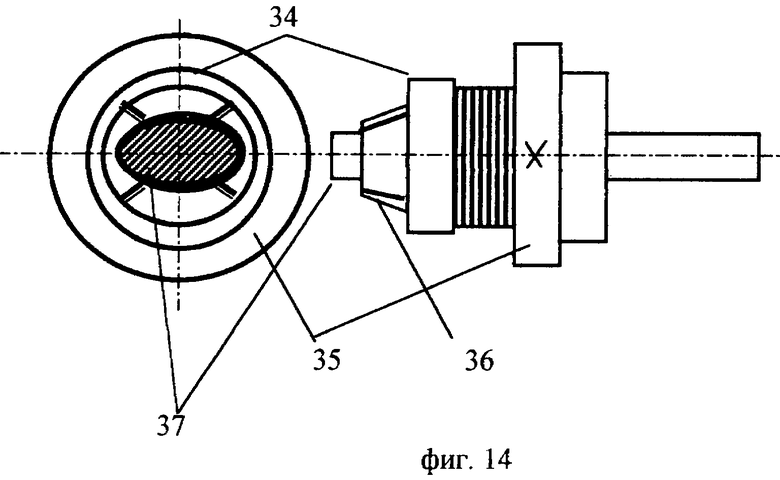
Указанная цель достигается тем, что внешняя часть муфты (34) представляет колесо механической пары (35), а внутренняя часть - цанговую втулку (37) продольного скольжения вала (37) с некруглым сечением (фиг.14). На фиг.14 показано (пример муфты-колеса):
34 - муфта;
35 - колесо механической пары;
36 - пружинная отжимная цанга-втулка;
37 - торсионный вал овального сечения.
Вариант 1: упомянутое колесо - ведомая часть зубчатой пары.
Вариант 2: упомянутое колесо - ведомая часть цепной пары.
Вариант 3: упомянутое колесо - ведомый шкив ременной передачи.
Принцип действия описанной муфты: перед включением привода цангу отжимают, обеспечивая продольный ход вала, и выдвигают его в рабочее положение (на требуемую длину), затем позволяют цанге сжаться, обеспечивая захват вала муфтой со стороны, противоположной рабочему органу.
5. «КРОВЕЛЬНЫЙ ДВОРНИК» (КД)
КД относится к портативным техническим средствам очистки труднодоступных строительных поверхностей (кровель, верхних фронтонов и т.п.) от снега, наледи, старой штукатурки и т.п.), может быть использован для механизации работ по обслуживанию и ремонту зданий.
Цель заявленного объекта - портативное техническое средство механизации очистки труднодоступных строительных поверхностей.
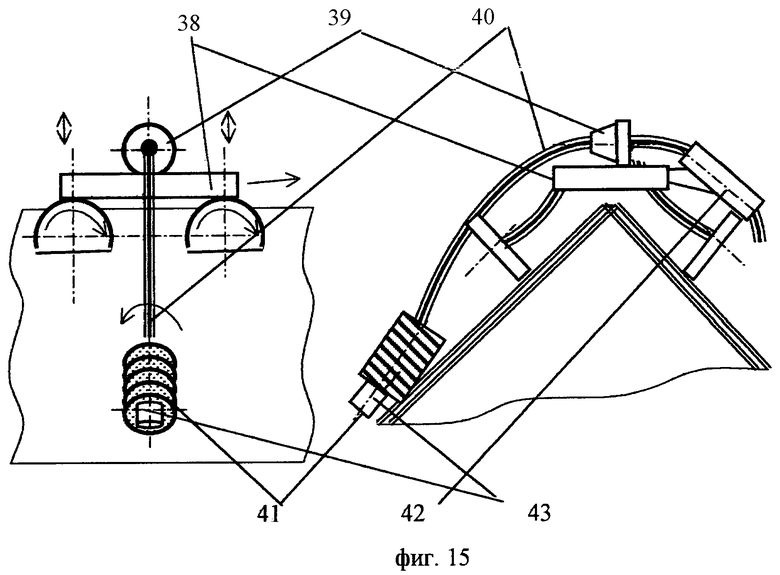
Указанная цель достигается тем, что транспортный механизм (ходовая часть 38) заявленного устройства (фиг.15) выполнен на основе СШК (см. раздел 3), а рабочий орган (соединенный со своим двигателем посредством поперечно-гибкой выдвижной передачи - прецессионной муфты-колеса (39) (см. раздел 4) со свободной (продольно-скользящей) посадкой поперечно-гибкого торсионного [1, с.505] вала (40), состоит из цилиндрической сборки сменных щеток (41), жесткость и размеры которых подобраны под конкретный вид работ (достаточны для разрушения удаляемого при чистке материала и недостаточны для разрушения материала - основы, например кровельного покрытия).
Пример КД
На фиг.15 показано:
38 - полноприводная ходовая часть с ШК на торсионных валах;
39 - муфта-колесо привода рабочего органа;
40 - торсионный вал привода рабочего органа;
41 - цилиндрическая сборка сменных щеток (рабочий орган - конечная ступень исполнительного механизма);
42 - ограничитель биения свободного конца вала (труба, консоль);
43 - прижимающий элемент (груз).
Преимуществом заявленного здесь устройства является механизация опасных и тяжелых работ, доныне не механизированных.
6. ИНВАЛИДНАЯ КОЛЯСКА ПОВЫШЕННОЙ ПРОХОДИМОСТИ (ИКПП)
Устройство относится к транспортным техническим средствам индивидуального передвижения людей с ограниченными физическими возможностями и может быть использовано для комфортного преодоления ими препятствий на пути (ступенек, бордюров и т.п.).
Цель заявленного объекта - транспортное техническое средство передвижения людей с ограниченными физическими возможностями, применимое для комфортного преодоления путевых препятствий.
Указанная цель достигается тем, что посадочное место полезного груза (инвалида) выполнено в форме удобного кресла, а транспортный механизм устройства с попеременно-возвратным горизонтальным и вертикальным движением рабочего органа выполнен на основе ЭКП (реализующей функцию пульсирующего ВМ и попеременно-возвратной ЦП ведомого колеса ЭКП, см. раздел 1) с регулируемым эксцентриситетом; габариты и вес устройства с полезной нагрузкой не превышают допустимых габаритов и веса перемещаемого в типовом пассажирском лифте груза (условие применимости в быту), центр тяжести устройства с полезной нагрузкой равноудален от точек опоры устройства на почву и находится ниже полезной нагрузки при дифференте устройства, необходимом для преодоления препятствий на пути, геометрически образуя с наиболее удаленными точками опоры призму с острыми углами в основаниях боковых граней и тупыми в вершинах (условие безопасности от опрокидывания при дифференте).
Вариант 1 ИКПП (см. фиг.5, опис. стр.4): ИКПП с использованием переднеприводной регулируемой ЭП с ручным рычажно-храповым реверсивным приводом и рабочим органом в форме 4-х колес велосипеда с крупным рельефом протекторов, смонтированных на раме.
Вариант 2 ИКПП: ИКПП (аналогично примеру 1) с автономным электроприводом - питаемым от аккумулятора (основным), ручным приводом (резервным) и самовытягивающей лебедкой (кабестаном [1, с.193] - для случаев затруднений функционирования основного механизма).
Вариант 3: аналогичен примерам 1, 2, с использованием ШК и цантовой прецессионной муфты-колеса (см. раздел 4) с торсионным валом (для амортизации толчков при движении, а также для регулировки поперечного габарита ИКПП при прохождении ИКПП узких проходов).
Преимуществами заявленного здесь устройства являются:
- более высокая проходимость транспортного средства для людей с ограниченными физическими возможностями, обеспечивающая более комфортное преодоление ими препятствий в бытовой среде;
- сопротивление механизма-привода спонтанному качению по уклону;
- технологичность конструкции;
- трансформируемый поперечный габарит;
- резервный альтернативный привод движения с низким энергопотреблением (вариант 3).
Группа описанных здесь устройств объединена:
- общим основным назначением - преодоление путевых препятствий транспортным механизмом без пиковых импульсов нагрузки на двигатель, вызываемых указанными препятствиями;
- общими конструктивными особенностями, реализующими принцип особой формы сочетания механических степеней свободы - ЦП.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Политехнический словарь, гл. ред. Артоболевский И.И., М, «С.Э.», 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| Маневренное велокресло Лукьянова | 2017 |
|
RU2662127C1 |
| ВЕЗДЕХОД | 2014 |
|
RU2549300C1 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2015 |
|
RU2578800C1 |
| ИНВАЛИДНАЯ КОЛЯСКА | 2000 |
|
RU2212874C2 |
| ЭКСЦЕНТРИКОВАЯ ШАРИКОВАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2007 |
|
RU2341710C1 |
| КАРЕТКА ЛЕСТНИЧНОГО ПОДВЕСНОГО ПОДЪЕМНИКА (ВАРИАНТЫ) | 2022 |
|
RU2791350C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО ШИШКОВА | 1994 |
|
RU2104200C1 |
| ВЕЗДЕХОД (ВАРИАНТЫ) | 2013 |
|
RU2542827C1 |








Устройства относятся к эксцентрической передаче и к транспортному устройству с такой передачей для применения в среде, неподготовленной для функционирования типовых механизмов и машин. Эксцентрическая передача на основе колесной пары содержит геометрические оси колес основной ступени передачи, соединенные тягой. Ведущий и ведомый валы колес эксцентрично смещены относительно геометрических осей на величину, пропорциональную необходимой пульсации вращающего момента и цилиндрической прецессии ведомого колеса. Расстояние между валами равно расстоянию между осями. В транспортном устройстве механизм устройства выполнен на основе эксцентрической передачи с регулируемым эксцентриситетом. Достигается возможность плавного преодоления переменной механической нагрузки, путевых препятствий без дополнительных затрат мощности. 2 н. и 5 з.п. ф-лы, 15 ил.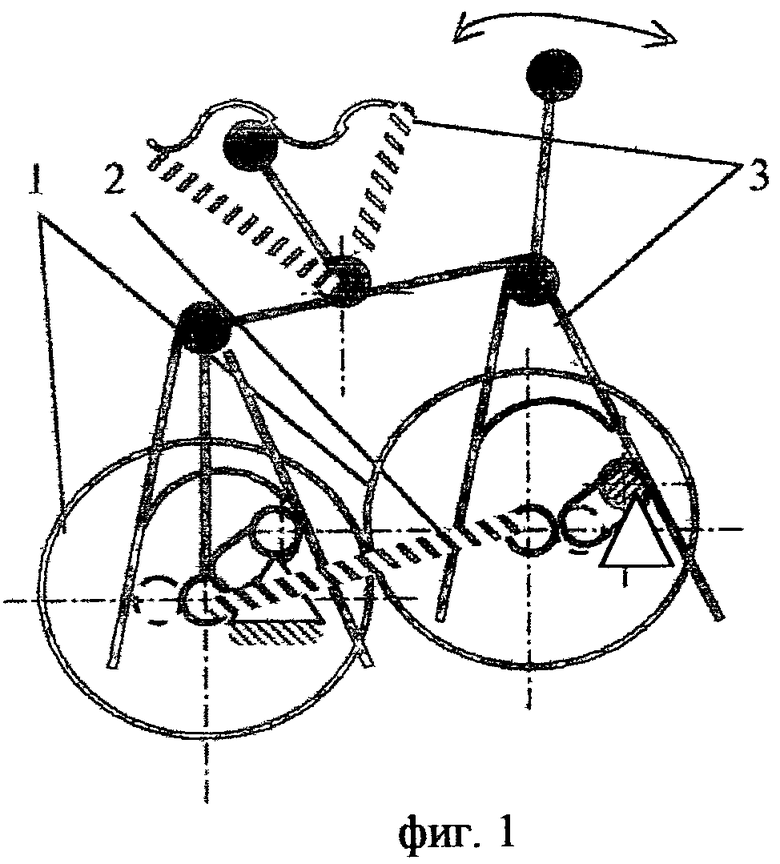
1. Механическая передача на основе колесной пары, отличающаяся тем, что геометрические оси колес основной ступени передачи соединены тягой; ведущий и ведомый валы колес эксцентрично смещены относительно геометрических осей на величину, пропорциональную необходимой пульсации вращающего момента и цилиндрической прецессии ведомого колеса, расстояние между валами равно расстоянию между осями с допуском на мелкие механические артефакты (< величины зуба колеса) - эксцентрическая передача.
2. Устройство по п.1, отличающееся тем, что основная ступень выполнена в форме зубчатой эксцентрической колесной пары с передаточным числом Z=1.
3. Устройство по п.1, отличающееся тем, что в него встроены механизм управления эксцентриситетом и пружинная межосевая тяга (Z>1/Z<1).
4. Устройство по п.1, отличающееся тем, что основная ступень выполнена в форме цепной эксцентрической колесной пары (Z>1/Z<1).
5. Устройство по п.4, отличающееся тем, что в него встроены механизм управления эксцентриситетом и компенсатор артефактов зацепления.
6. Устройство транспортное с попеременно-возвратным горизонтальным и вертикальным движением рабочего органа, отличающееся тем, что механизм устройства выполнен на основе эксцентрической передачи по п.1 с регулируемым эксцентриситетом.
7. Устройство транспортное по п.6, отличающееся тем, что центр тяжести устройства с полезным грузом равноудален от точек опоры устройства на почву и находится ниже полезного груза при необходимом дифференте устройства, геометрически образуя с наиболее удаленными точками опоры призму с острыми углами в основаниях боковых граней и тупыми - в вершине призмы, а форма, габариты и вес устройства с полезной нагрузкой аналогичны параметрам типовой инвалидной коляски.
| АРТОБОЛЕВСКИЙ А.А | |||
| МЕХАНИЗМЫ В СОВРЕМЕННОЙ ТЕХНИКЕ | |||
| Справочное пособие для инженеров, конструкторов и изобретателей, т.4, ЗУБЧАТЫЕ МЕХАНИЗМЫ | |||
| МОСКВА «НАУКА» | |||
| ГЛАВНАЯ РЕДАКЦИЯ ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ, 1980, с.19, рис.2158, с.40, рис.2182, с.49, рис.2191, с.53, рис.2195 | |||
| RU 95106052 A1, 27.11.1996 | |||
| CN 101561029 A, 21.10.2009. |

