Изобретение относится к бортовым системам управления угловым движением существенно нестационарных летательных аппаратов (ЛА).
Известен способ формирования сигнала управления для системы управления, при котором задают управляющий сигнал, измеряют регулируемые координаты углов и угловых скоростей и формируют управляющее воздействие на исполнительные приводы ЛА [1].
Известно устройство формирования сигнала управления, содержащее задатчик сигнала управления, датчик угла, датчик угловой скорости и формирователь управляющего воздействия [1].
Недостатками известных способа и устройства являются ограниченность выбора коэффициента усиления обратной связи по датчику угловой скорости и ограниченность возможностей управления.
Наиболее близким способом к предлагаемому является способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением ЛА, заключающийся в том, что измеряют текущий цифровой сигнал углового положения ЛА, измеряют аналоговый сигнал угловой скорости ЛА, задают цифровой сигнал управления, формируют цифровой сигнал рассогласования между текущим цифровым сигналом углового положения и заданным цифровым сигналом управления, усиливают полученный цифровой сигнал рассогласования, усиливают аналоговый сигнал угловой скорости, преобразуют цифровую компоненту сигнала управления в сигнал аналоговой формы, суммируют преобразованный сигнал цифровой компоненты сигнала управления аналоговой формы с усиленным аналоговым сигналом угловой скорости, полученный суммарный сигнал является выходным сигналом управления [2].
Наиболее близким устройством к предлагаемому изобретению является устройство, содержащее последовательно соединенные цифровой задатчик сигнала управления, элемент сравнения и первый усилитель, цифровой датчик угла, выход которого соединен со вторым входом элемента сравнения, последовательно соединенные аналоговый датчик угловой скорости, второй усилитель и первый сумматор, выход которого является выходом устройства, цифроаналоговый преобразователь, выход которого соединен со вторым входом первого сумматора [2].
Недостатками известных способа и устройства являются ограниченные функциональные возможности в условиях существенной нестационарности ЛА и невысокая динамическая точность управления.
Решаемой в предложенных способе и устройстве технической задачей является расширение функциональных возможностей и повышение динамической точности управления при существенной нестационарности параметров ЛА.
Указанный технический результат достигается тем, что в известный способ формирования цифроаналогового адаптивного сигнала управления для бортовых систем управления угловым движением ЛА, заключающийся в том, что измеряют текущий цифровой сигнал углового положения ЛА, измеряют аналоговый сигнал угловой скорости ЛА, задают цифровой сигнал управления, формируют цифровой сигнал рассогласования между текущим цифровым сигналом углового положения и заданным цифровым сигналом управления, усиливают полученный цифровой сигнал рассогласования с коэффициентом K0, усиливают аналоговый сигнал угловой скорости ЛА с коэффициентом K1, преобразуют цифровую компоненту сигнала управления в сигнал аналоговой формы, суммируют преобразованный сигнал цифровой компоненты сигнала управления аналоговой формы с усиленным аналоговым сигналом угловой скорости, полученный суммарный сигнал является выходным сигналом управления, дополнительно выделяют цифровой сигнал производной сигнала рассогласования, усиливают цифровой сигнал производной сигнала рассогласования с коэффициентом K2, формируют цифровую компоненту сигнала управления суммированием усиленного цифрового сигнала рассогласования и усиленного цифрового сигнала производной сигнала рассогласования, при этом коэффициент усиления K2=(0,2÷1,5)K1, измеряют сигнал скоростного напора q при полете ЛА и перестраивают коэффициенты усиления K0, K1 и K2 по обратно пропорциональной зависимости от скоростного напора, K0=A0/q, K1=A1/q и K2=A2/q, где A0, A1, A2=const.
Указанный технический результат достигается также тем, что в известное устройство формирования сигнала управления, содержащее последовательно соединенные цифровой задатчик сигнала управления, элемент сравнения и первый усилитель, цифровой датчик угла, выход которого соединен со вторым входом элемента сравнения, последовательно соединенные аналоговый датчик угловой скорости, второй усилитель и первый сумматор, выход которого является выходом устройства, цифроаналоговый преобразователь, выход которого соединен со вторым входом первого сумматора, дополнительно введены последовательно соединенные цифровое дифференцирующее звено, вход которого соединен с выходом элемента сравнения, третий усилитель и второй сумматор, второй вход которого соединен с выходом первого усилителя, а выход - со входом цифроаналогового преобразователя, первый, второй и третий задатчики постоянного сигнала, последовательно соединенные измеритель скоростного напора и первый блок деления, второй вход которого соединен с выходом первого задатчика постоянного сигнала, а выход - со вторым входом первого усилителя, второй блок деления, первый вход которого соединен с измерителем скоростного напора, второй вход - с выходом задатчика постоянного сигнала, а выход - со вторым входом второго усилителя, и третий блок деления, первый вход которого соединен с измерителем скоростного напора, второй вход - с выходом третьего задатчика постоянного сигнала, а выход - со вторым входом третьего усилителя.
На чертеже представлена блок-схема устройства формирования цифроаналогового адаптивного сигнала управления, реализующая предложенный способ.
Устройство формирования цифроаналогового адаптивного сигнала управления содержит последовательно соединенные цифровой задатчик сигнала управления 1 (ЦЗСУ), элемент сравнения 2 (ЭС) и первый усилитель 3 (1У), цифровой датчик угла 4 (ЦДУ), выход которого соединен со вторым входом элемента сравнения 2, последовательно соединенные аналоговый датчик угловой скорости 5 (АДУС), второй усилитель 6 (2У) и первый сумматор 7 (1C), выход которого является выходом устройства, цифроаналоговый преобразователь 8 (ЦАП), выход которого соединен со вторым входом первого сумматора 7, последовательно соединенные цифровое дифференцирующее звено 9 (ЦДЗ), вход которого соединен с выходом элемента сравнения 2, третий усилитель 10 (3У) и второй сумматор 11 (2С), второй вход которого соединен с выходом первого усилителя 3, а выход - со входом цифроаналогового преобразователя 8, первый 12 (1ЗПС), второй 13 (2ЗПС) и третий 14 (3ЗПС) задатчики постоянного сигнала, последовательно соединенные измеритель скоростного напора 15 (ИСН) и первый блок деления 16 (1БД), второй вход которого соединен с выходом первого задатчика постоянного сигнала 12, а выход - со вторым входом первого усилителя 3, второй блок деления 17 (2БД), первый вход которого соединен с измерителем скоростного напора 15, второй вход - с выходом второго задатчика постоянного сигнала, а выход - со вторым входом второго усилителя 6, и третий блок деления 18 (ЗБД), первый вход которого соединен с измерителем скоростного напора 15, второй вход - с выходом третьего задатчика постоянного сигнала 14, а выход - со вторым входом третьего усилителя 10.
Устройство, реализующее предложенный способ, работает следующим образом.
Измеряют датчиком 4 текущий цифровой сигнал углового положения ЛА φ(t) с тактовой частотой fт, измеряют датчиком 5 аналоговый сигнал угловой скорости ωφ(t) ЛА, задатчиком 1 задают цифровой управляющий сигнал φзад(t) - Элементом сравнения 2 формируют цифровой сигнал рассогласования между текущим цифровым сигналом углового положения и заданным цифровым сигналом управления

Первым усилителем 3 усиливают полученный сигнал рассогласования Δφ(t) с коэффициентом K0(q) в функции от скоростного напора q, измеряемого измерителем скоростного напора 15, и получают цифровую компоненту сигнала рассогласования

где q - скоростной напор

ρ - плотность воздуха на текущей высоте полета Н;
V - скорость полета ЛА.
Усилителем 6 усиливают аналоговый сигнал угловой скорости ωφ(t) ЛА с адаптивным коэффициентом K1(q) в функции от скоростного напора q и получают демпфирующую аналоговую компоненту сигнала управления

Формируют блоком 9 цифровой сигнал производной сигнала рассогласования  с тактовой частотой fт, например, на основе вычисления скорости приращения сигнала рассогласования
с тактовой частотой fт, например, на основе вычисления скорости приращения сигнала рассогласования

где TT=1/fТ;
i - i-й шаг такта бортовой цифровой вычислительной машины.
Усиливают цифровой сигнал производной сигнала рассогласования 
усилителем 10 с адаптивным коэффициентом K2(q), получают сигнал

На сумматоре 11 формируют цифровую компоненту сигнала управления u4 суммированием усиленного цифрового сигнала рассогласования u1 и усиленного сигнала цифровой производной сигнала рассогласования u3, то есть

Преобразуют цифровую компоненту сигнала управления u4 преобразователем 8 в сигнал аналоговой формы u5, например, на основе эктраполятора 0-го порядка [3], суммируют сигнал цифровой компоненты аналоговой формы u5 сумматором 7 с усиленным аналоговым сигналом угловой скорости u2, получают выходной сигнал управления

который является выходным сигналом устройства.
При этом обеспечивается максимальная отработка заданного угла с повышением качества и посредством увеличения коэффициента демпфирования формированием производной рассогласования и адаптивной перестройкой коэффициентов усиления K0(q), K1(q) и K2(q) усилителями 3, 6 и 10 соответственно в функции от скоростного напора q:
K0=A0/q,
K1=A1/q,
K2=A2/q,
где A0, A1, A2=const.
При этом сигналы A0, A1, A2 задаются задатчиками постоянного сигнала 14, 13, 12, а процессы деления сигналов A0, A1, A2 на q обеспечиваются блоками деления 18, 17, 16 соответственно.
Необходимо отметить, что для обеспечения эффективности и устойчивости процессов управления коэффициент усиления сигнала цифровой производной сигнала рассогласования K2(q) составляет (0,2÷1,5) коэффициента усиления аналогового сигнала угловой скорости ЛА K1(q) по условиям эффективности и устойчивости управления.
Таким образом, предложенным способом формирования адаптивного сигнала управления достигается функциональная возможность достижения максимальной интенсивности управления благодаря введению средств адаптации параметров управления, увеличение динамической точности посредством уменьшения дефицита управления.
Все функции формирования сигнала управления и звенья устройства могут быть реализованы на элементах автоматики и вычислительной техники и программно-алгоритмически.
Источники информации
1. И.А.Михалев и др. Системы автоматического управления самолетом. - М.: Машиностроение, 1987 г., с.174.
2. Патент №2391694, G05D 1/00 от 15.04.2009 г.
3. Б.Куо. Теория и проектирование цифровых систем управления. - М.: Машиностроение, 1986 г., с.32-36, 63.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491602C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ НЕСТАЦИОНАРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490686C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ПЕРЕМЕННОЙ СТРУКТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491601C1 |
| Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления | 2016 |
|
RU2631718C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2473107C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА УГЛОВОЙ СТАБИЛИЗАЦИИ НЕСТАЦИОНАРНОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2653409C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ШИРОКОМ СПЕКТРЕ ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589236C1 |
Группа изобретений относится к бортовым системам управления угловым движением беспилотных летательных аппаратов (БПЛА). Техническим результатом является расширение функциональных возможностей и повышение динамической точности управления. Он достигается тем, что устройство формирования цифроаналогового адаптивного сигнала управления содержит цифровой задатчик сигнала управления, элемент сравнения, первый усилитель, цифровой датчик угла, датчик угловой скорости, второй усилитель, первый сумматор, цифроаналоговый преобразователь, цифровое дифференцирующее звено, третий усилитель, второй сумматор, первый, второй и третий задатчики постоянного сигнала, измеритель скоростного напора, первый, второй и третий блоки деления. 2 н.п. ф-лы, 1 ил.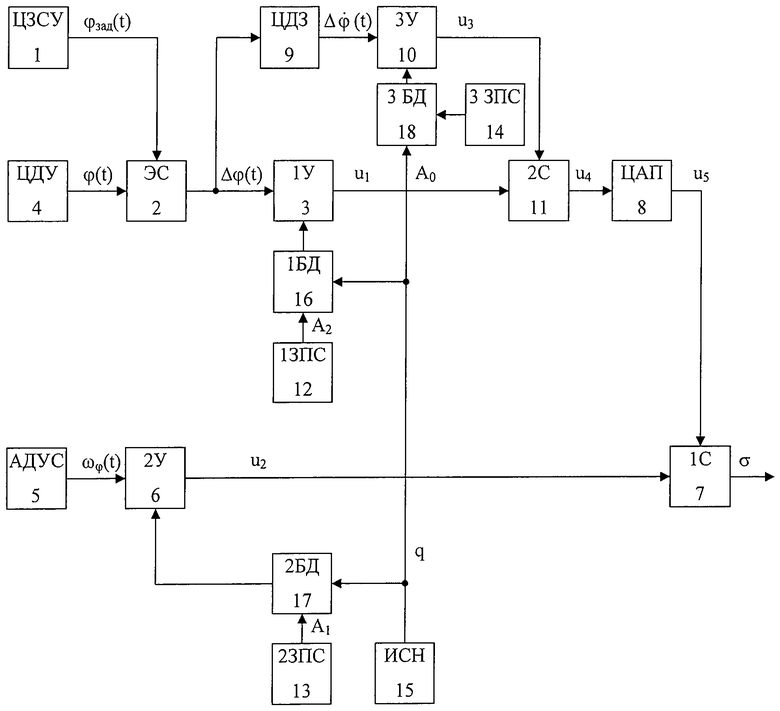
1. Способ формирования цифроаналогового адаптивного сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов, заключающийся в том, что измеряют текущий цифровой сигнал углового положения летательного аппарата, измеряют аналоговый сигнал угловой скорости летательного аппарата, задают цифровой сигнал управления, формируют цифровой сигнал рассогласования между текущим цифровым сигналом углового положения и заданным цифровым сигналом управления, усиливают полученный цифровой сигнал рассогласования с коэффициентом K0, усиливают аналоговый сигнал угловой скорости летательного аппарата с коэффициентом K1, преобразуют цифровую компоненту сигнала управления в сигнал аналоговой формы, суммируют преобразованный сигнал цифровой компоненты сигнала управления аналоговой формы с усиленным аналоговым сигналом угловой скорости, полученный суммарный сигнал является выходным сигналом управления, отличающийся тем, что выделяют цифровой сигнал производной сигнала рассогласования, усиливают цифровой сигнал производной сигнала рассогласования с коэффициентом K2, формируют цифровую компоненту сигнала управления суммированием усиленного цифрового сигнала рассогласования и усиленного цифрового сигнала производной сигнала рассогласования, при этом коэффициент усиления K2=(0,2÷1,5)K1, измеряют сигнал скоростного напора q при полете летательного аппарата и перестраивают коэффициенты усиления K0, K1 и K2 по обратно пропорциональной зависимости от скоростного напора, K0=A0/q, K1=A1/q и K2=А2/q, где A0, A1, A2=const.
2. Устройство для осуществления способа по п.1, содержащее последовательно соединенные цифровой задатчик сигнала управления, элемент сравнения и первый усилитель, цифровой датчик угла, выход которого соединен со вторым входом элемента сравнения, последовательно соединенные аналоговый датчик угловой скорости, второй усилитель и первый сумматор, выход которого является выходом устройства, цифроаналоговый преобразователь, выход которого соединен со вторым входом первого сумматора, отличающийся тем, что в устройство введены последовательно соединенные цифровое дифференцирующее звено, вход которого соединен с выходом элемента сравнения, третий усилитель и второй сумматор, второй вход которого соединен с выходом первого усилителя, а выход - со входом цифроаналогового преобразователя, первый, второй и третий задатчики постоянного сигнала, последовательно соединенные измеритель скоростного напора и первый блок деления, второй вход которого соединен с выходом первого задатчика постоянного сигнала, а выход - со вторым входом первого усилителя, второй блок деления, первый вход которого соединен с измерителем скоростного напора, второй вход - с выходом второго задатчика постоянного сигнала, а выход - со вторым входом второго усилителя, и третий блок деления, первый вход которого соединен с измерителем скоростного напора, второй вход - с выходом третьего задатчика постоянного сигнала, а выход - со вторым входом третьего усилителя.
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ НЕСТАЦИОНАРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338235C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| US 20100292874 A1, 18.11.2010. | |||

