Изобретение относится к бортовым системам автоматического управления летательными аппаратами (регулирования угловых параметров и скоростей), для которых характерны существенно нестационарные условия полета.
Наиболее близким к предлагаемому изобретению является «Система управления угловым движением беспилотного летательного аппарата» [1]. Она содержит последовательно соединенные задатчик угла тангажа и первый блок сравнения; второй блок сравнения; последовательно соединенные задатчик угла крена и третий блок сравнения, а также блок свободных гироскопов, первый, второй и третий выходы которого соединены соответственно с вторыми входами первого, второго и третьего блоков сравнения. В состав «Системы» входят также блок демпфирующих гироскопов, первый, второй и третий суммирующие усилители и исполнительное устройство. При этом первый, второй и третий выходы блока демпфирующих гироскопов соединены с входами первого, второго и третьего суммирующих усилителей соответственно, а выходы этих суммирующих усилителей соединены с первым, вторым и третьим входами исполнительного устройства соответственно.
Существенными признаками прототипа, совпадающими с существенными признаками предлагаемого технического решения является то, что бортовая цифроаналоговая адаптивная система управления летательным аппаратом содержит последовательно соединенные задатчик угла тангажа и первый блок сравнения, второй блок сравнения, последовательно соединенные задатчик угла крена и третий блок сравнения, а также блок свободных гироскопов, блок демпфирующих гироскопов, исполнительное устройство и первый, второй и третий суммирующие усилители, выходы которых соединены с первым, вторым и третьим входами исполнительного устройства соответственно, причем вторые входы первого, второго и третьего блоков сравнения соединены соответственно с первым, вторым и третьим выходами блока свободных гироскопов.
Недостатками известной системы являются ограниченные функциональные возможности в условиях нестационарности параметров движения летательного аппарата, прежде всего скорости и высоты полета и инерционно-массовых характеристик летательного аппарата. Этот недостаток объясняется невозможностью оптимального выбора постоянных значений передаточных чисел системы управления при достаточно глубоком изменении характеристик объекта управления. Постоянство передаточных чисел не только ухудшает качество переходных процессов в каналах стабилизации и управления, но в предельных случаях (очень глубоком изменении характеристик) может привести к потере устойчивости летательного аппарата.
Решаемой в предложенной системе управления технической задачей является расширение функциональных возможностей системы с обеспечением приемлемого качества управления в существенно нестационарных условиях полета.
Указанный технический результат достигается тем, что в известную систему управления угловым движением беспилотного летательного аппарата, содержащую последовательно соединенные задатчик угла тангажа и первый блок сравнения; второй блок сравнения; последовательно соединенные задатчик угла крена и третий блок сравнения, а также блок свободных гироскопов, блок демпфирующих гироскопов, исполнительное устройство и первый, второй и третий суммирующие усилители, выходы которых соединены с первым, вторым и третьим входами исполнительного устройства соответственно, причем вторые входы первого, второго и третьего блоков сравнения соединены соответственно с первым, вторым и третьим выходами блока свободных гироскопов, дополнительно введены последовательно соединенные датчик скорости полета, первый блок умножения, второй вход которого также соединен с выходом датчика скорости полета, второй блок умножения, сумматор, блок формирования обратной величины сигнала и блок масштабирования, последовательно соединенные датчик высоты полета и первый блок деления, выход которого подключен ко второму входу сумматора, последовательно соединенные датчик текущего значения массы и второй блок деления, выход которого подключен к третьему входу сумматора, задатчик опорных сигналов, первый, второй и третий выходы которого подсоединены соответственно ко второму входу второго блока умножения, второму входу первого блока деления и второму входу второго блока деления, задатчик угла курса, подключенный выходом к первому входу второго блока сравнения, цифровой блок умножения, первый, второй и третий входы которого подсоединены соответственно к выходам первого, второго и третьего блоков сравнения, четвертый, пятый и шестой входы подключены соответственно к первому, второму и третьему выходам блока масштабирования, а первый, второй и третий выходы соединены соответственно с первым, вторым и третьим входами цифроаналогового преобразователя, первый, второй и третий выходы которого подсоединены к первым входам соответственно первого, второго и третьего суммирующих усилителей, и цифроаналоговый блок умножения, первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам блока демпфирующих гироскопов, четвертый, пятый и шестой входы соединены соответственно с четвертым, пятым и шестым выходами блока масштабирования, а первый, второй и третий выходы соединены со вторыми входами соответственно первого, второго и третьего суммирующих усилителей.
Отличительными признаками предлагаемого технического решения являются следующие: последовательно соединенные датчик скорости полета, первый блок умножения, второй вход которого также соединен с выходом датчика скорости полета, второй блок умножения, сумматор, блок формирования обратной величины сигнала и блок масштабирования, последовательно соединенные датчик высоты полета и первый блок деления, выход которого подключен ко второму входу сумматора, последовательно соединенные датчик текущего значения массы и второй блок деления, выход которого подключен к третьему входу сумматора, задатчик опорных сигналов, первый, второй и третий выходы которого подсоединены соответственно ко второму входу второго блока умножения, второму входу первого блока деления и второму входу второго блока деления, задатчик угла курса, подключенный выходом к первому входу второго блока сравнения, цифровой блок умножения, первый, второй и третий входы которого подсоединены соответственно к выходам первого, второго и третьего блоков сравнения, четвертый, пятый и шестой входы подключены соответственно к первому, второму и третьему выходам блока масштабирования, а первый, второй и третий выходы соединены соответственно с первым, вторым и третьим входами цифроаналогового преобразователя, первый, второй и третий выходы которого подсоединены к первым входам соответственно первого, второго и третьего суммирующих усилителей, и цифроаналоговый блок умножения, первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам блока демпфирующих гироскопов, четвертый, пятый и шестой входы соединены соответственно с четвертым, пятым и шестым выходами блока масштабирования, а первый, второй и третий выходы соединены со вторыми входами соответственно первого, второго и третьего суммирующих усилителей.
Предлагаемое построение бортовой цифроаналоговой адаптивной системы управления летательным аппаратом позволяет в достаточно широком диапазоне изменения параметров, обусловливающих его динамические свойства (скорость и высота полета, массоинерционные характеристики) обеспечивать требуемое качество процессов управления. В конечном счете, это дает возможность осуществлять устойчивый полет летательного аппарата и требуемую точность выполнения заданной траектории его движения.
Применение предлагаемой бортовой цифроаналоговой адаптивной системы управления особенно эффективно на высотных летательных аппаратах с большими скоростями полета и большими значениями расходуемой массы топлива.
Предлагаемое техническое решение поясняется схемами фиг.1, 2.
На фиг.1 представлена структурная схема системы.
На фиг.2 представлена структурная схема исполнительного устройства.
Бортовая цифроаналоговая адаптивная система управления (фиг.1) содержит последовательно соединенные датчик скорости полета 1 (ДСП), первый блок умножения 11 (1й БУ), второй вход которого также соединен с выходом датчика скорости полета 1, второй блок умножения 14 (2й БУ), сумматор 15 (С), блок формирования обратной величины сигнала 16 (БФОВС) и блок масштабирования 17 (БМ), последовательно соединенные датчик высоты полета 2 (ДВП) и первый блок деления 12 (1 и БД), выход которого подключен ко второму входу сумматора 15, последовательно соединенные датчик текущего значения массы 3 (ДТМ) и второй блок деления 13 (2й БД), выход которого подключен к третьему входу сумматора 15, задатчик опорных сигналов 10 (ЗОС), первый, второй и третий выходы которого подсоединены соответственно ко второму входу второго блока умножения 14, второму входу первого блока деления 12 и второму входу второго блока деления 13, последовательно соединенные задатчик угла тангажа 19 (ЗУТ) и первый блок сравнения 22 (1й БС), последовательно соединенные задатчик угла курса 20 (ЗУК) и второй блок сравнения 23 (2й БС), последовательно соединенные задатчик угла крена 21 (ЗУКр) и третий блок сравнения 24 (3й БС), цифровой блок умножения 25 (ЦБУ), первый, второй и третий входы которого подсоединены соответственно к выходам первого 22, второго 23 и третьего 24 блоков сравнения, четвертый, пятый и шестой входы подключены соответственно к первому, второму и третьему выходам блока масштабирования 17, а первый, второй и третий выходы соединены соответственно с первым, вторым и третьим входами цифроаналогового преобразователя 26 (ЦАП), первый, второй и третий выходы которого подсоединены к первым входам соответственно первого 7 (1й СУ), второго 8 (2й СУ) и третьего 9 (3й СУ) суммирующих усилителей, и цифроаналоговый блок умножения 18 (ЦАБУ), первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам блока демпфирующих гироскопов 4 (БДГ), четвертый, пятый и шестой входы соединены соответственно с четвертым, пятым и шестым выходами блока масштабирования 17, а первый, второй и третий выходы соединены со вторыми входами соответственно первого 7, второго 8 и третьего 9 суммирующих усилителей, выходы которых подключены к первому, второму и третьему входам исполнительного устройства 5 (ИУ), причем вторые входы первого 22, второго 23 и третьего 24 блоков сравнения соединены соответственно с первым, вторым и третьим выходами блока свободных гироскопов 6 (БСГ). Летательный аппарат (ЛА) на фиг.1, а также на фиг.2 показан условно.
В соответствии со схемой на фиг.2 исполнительное устройство 5 бортовой цифроаналоговой адаптивной системы управления содержит последовательно соединенные первый сумматор 27 и первый рулевой привод 28, последовательно соединенные первый инвертор 29, второй сумматор 30 и второй рулевой привод 31 и последовательно соединенные второй инвертор 32, третий сумматор 33 и третий рулевой привод 34, причем первый вход исполнительного устройства подключен ко вторым входам второго 30 и третьего 33 сумматоров, второй вход исполнительного устройства соединен с первым входом первого сумматора 27, входом первого инвертора 29 и третьим входом третьего сумматора 33, а третий вход исполнительного устройства подсоединен ко второму входу первого 27 и третьему входу второго 30 сумматоров и входу второго инвертора 32. Блоки 27, 29, 30, 32 и 33 условно объединены в блок 35 - блок кинематической разводки (БКР).
Таким образом, бортовая цифроаналоговая адаптивная система управления летательным аппаратом содержит два контура:
1 - контур управления и стабилизации летательного аппарата, в состав которого входят звенья 4…9, 19…24;
2 - контур адаптации, в который входят звенья 1…3, 10…18 и 25, 26. Контур управления и стабилизации работает следующим образом. Входные сигналы исполнительного устройства 5 σϑ, σψ, σγ формируются в суммирующих усилителях 7, 8, 9 по законам:
где iв, iн, iэ, ρв, ρн, ρэ - передаточные числа контура управления и стабилизации по позиционным и демпфирующим сигналам, определяемые контуром адаптации системы; ωx, ωy, ωz - угловые скорости вращения ЛА, являющиеся выходными сигналами блока демпфирующих гироскопов 4.
Позиционные сигналы (ϑ-ϑy), (ψ-ψy), (γ-γy) формируются в блоках сравнения 22, 23, 24 по сигналам задатчиков углов тангажа, курса и крена 19, 20, 21 и сигналам, пропорциональным углам ориентации летательного аппарата - выходным сигналам блока свободных гироскопов 6.
Поканальные управляющие сигналы σϑ, σψ, σγ в блоке кинематической разводки исполнительного устройства 5 распределяются по рулевым приводам летательного аппарата по соответствующим законам; например, для летательного аппарата с тремя рулевыми поверхностями, расположенными по схеме, приведенной на фиг.1, 2 в блоке ЛА, эти законы имеют вид [2, стр.7]:
где  - входные сигналы рулевых приводов 28, 31, 34, входящих в состав исполнительного устройства 5; kψ, kγ - коэффициенты кинематической разводки, реализуемые в сумматорах 27, 30, 33 блока кинематической разводки (фиг.2). Определение величин коэффициентов кинематической разводки может быть выполнено, например, в соответствии с формулами:
- входные сигналы рулевых приводов 28, 31, 34, входящих в состав исполнительного устройства 5; kψ, kγ - коэффициенты кинематической разводки, реализуемые в сумматорах 27, 30, 33 блока кинематической разводки (фиг.2). Определение величин коэффициентов кинематической разводки может быть выполнено, например, в соответствии с формулами:
где  - аэродинамические коэффициенты эффективности первого и второго рулей (при схеме расположения рулей по фиг.1, 2) относительно осей крена и курса летательного аппарата. Формулы (3) получены в предположении равенства коэффициентов эффективности для второго и третьего рулей.
- аэродинамические коэффициенты эффективности первого и второго рулей (при схеме расположения рулей по фиг.1, 2) относительно осей крена и курса летательного аппарата. Формулы (3) получены в предположении равенства коэффициентов эффективности для второго и третьего рулей.
Контур адаптации работает следующим образом.
В первом приближении уравнения углового движения летательного аппарата в канале тангажа, например, по [3, стр.616] описываются в виде:
где a, b - динамические коэффициенты летательного аппарата по демпфированию и эффективности рулей соответственно,
 - угол отклонения рулей высоты исполнительным устройством (рулевым приводом) летательного аппарата.
- угол отклонения рулей высоты исполнительным устройством (рулевым приводом) летательного аппарата.
Полагая для простоты изложения дальнейших рассуждений исполнительное устройство идеальным, т.е. положив  , из уравнений (1), (4) можно получить описание процессов регулирования в замкнутом контуре «система управления - летательный аппарат» в виде:
, из уравнений (1), (4) можно получить описание процессов регулирования в замкнутом контуре «система управления - летательный аппарат» в виде:

или

Характеристическое уравнение замкнутой системы управления в соответствии с (6) имеет вид:

Уравнение (7) позволяет сопоставить параметры закона управления (1) iв и ρв с динамическими коэффициентами летательного аппарата a и b. Для обеспечения постоянства характеристик устойчивости и качества переходных процессов необходимо обеспечить в процессе полета выполнение условий стабильности (инвариантности) коэффициентов характеристического уравнения, т.е.
В уравнениях (5) и, соответственно, (8) коэффициент а, характеризующий собственное демпфирование летательного аппарата, достаточно мал, слабо изменяется и не является характерным, доминирующим в сравнении с параметром bρв, определяющим демпфирование замкнутой системы в целом. Поэтому условия сохранения требуемых показателей устойчивости и качества переходных процессов исходя из (8) могут быть определены как
где b - коэффициент эффективности органов управления (рулевых поверхностей) летательного аппарата, определяемый в соответствии с [3, стр.618] формулой
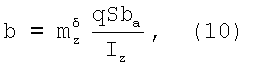
 - производная аэродинамического коэффициента эффективности по отклонению рулей,
- производная аэродинамического коэффициента эффективности по отклонению рулей,
S,ba - характерные геометрические размеры (площадь и средняя
аэродинамическая хорда) летательного аппарата,
Iz - момент инерции летательного аппарата относительно поперечной оси,
q - скоростной напор:
ρ - плотность воздуха на текущей высоте полета, ρ=ρ(Н),
v - скорость полета.
Если считать, что аэродинамический коэффициент  является, в основном, функцией числа М (отношения скорости полета к скорости звука) и может быть принят постоянным для достаточно широкой области высот и скоростей полета, то его можно считать стабильным в окрестности балансировочных значений текущих углов ориентации летательного аппарата.
является, в основном, функцией числа М (отношения скорости полета к скорости звука) и может быть принят постоянным для достаточно широкой области высот и скоростей полета, то его можно считать стабильным в окрестности балансировочных значений текущих углов ориентации летательного аппарата.
Момент инерции Iz для беспилотных летательных аппаратов также
меняется незначительно. Таким образом, основной причиной нестационарности динамического коэффициента b (10) является скоростной напор q. Исходя из уравнений (9) и на основе уравнений (10), (11) с учетом изложенного функцию адаптации λ необходимо сформировать в виде
При этом для режимов с величинами скоростного напора, принадлежащим нерасчетным значениям q<qmin и q>qmax, величина λ ограничивается соответствующими значениями, т.е.
Из уравнений (9) получаются алгоритмы адаптации:
Как указано выше, выводы (4)…(13) сделаны для первого приближения в описаниях уравнений движения летательного аппарата. Более точные соотношения дают следующие законы адаптации для всех трех каналов управления и стабилизации:
где Н - высота полета, m - текущее значение массы летательного аппарата.
Формульные зависимости (14) реализуются в схеме предлагаемого устройства. Величины v, Н, m измеряются датчиками 1…3, величина v2 вычисляется в первом блоке умножения 11, слагаемые знаменателя выражений (14) вычисляются во втором блоке умножения 14 и в первом 12 и втором 13 блоках деления, на вторые входы которых из задатчика опорных сигналов 10 подаются константы В1, В2, В3. Знаменатель вычисляется в сумматоре 15, обратная величина его - в блоке формирования обратной величины сигнала 16, в блоке масштабирования 17 вычисляются величины iв, iн, iэ, ρв, ρн, ρэ путем умножения величины, обратной знаменателю, на постоянные масштабные величины А1 в,н,э, А2 в,н,э.
В цифровом блоке умножения 25 происходит перемножение цифровых величин позиционных сигналов управления, полученных в первом 22, втором 23 и третьем 24 блоках сравнения на передаточные числа iв, iн, iэ. В цифроаналоговом преобразователе 26 полученные величины переводятся в аналоговые сигналы и поступают на входы первого 7, второго 8 и третьего 9 суммирующих усилителей, на вторые входы которых подаются аналоговые сигналы, являющиеся результатами перемножения в цифроаналоговом блоке умножения 18 цифровых величин ρв, ρн, ρэ на аналоговые сигналы угловых скоростей ωx, ωy, ωz с выхода блока демпфирующих гироскопов 4.
Наиболее точно достаточно сложные законы адаптации на основе соотношений (14) могут быть реализованы при наличии на борту летательного аппарата цифровой вычислительной системы. Все блоки устройства управления являются общеизвестными и могут быть реализованы на элементах автоматики и вычислительной техники, например, по [5, стр.103; 6, стр.55].
Таким образом, предложенная бортовая цифроаналоговая адаптивная система управления летательным аппаратом позволяет расширить функциональные возможности управления летательным аппаратом и обеспечить требуемые запасы устойчивости контура стабилизации и требуемое качество переходных процессов за счет адаптации передаточных чисел каналов управления к условиям полета.
Источники информации
1. Система управления угловым движением беспилотного летательного аппарата. Патент РФ № 2234117, кл. G05D 1/08, 2003 г.
2. Устройство формирования управляющих сигналов для системы управления летательным аппаратом. Патент РФ № 2238582, кл. G05D 1/08, 2003 г.
3. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998.
4. В.А.Боднер. Теория автоматического управления полетом. М.: Наука, 1964. С.178.
5. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981.
6. В.Б.Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КРЕНУ | 2005 |
|
RU2305308C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| БОРТОВАЯ СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2338236C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2469373C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2413274C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РУЛЕВЫМ ПРИВОДОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2681823C1 |
| Адаптивная система с эталонной моделью для управления летательным аппаратом | 2016 |
|
RU2647405C1 |
Изобретение относится к области приборостроения и может найти применение в системах автоматического управления летательными аппаратами. Технический результат - расширение функциональных возможностей. Для достижения данного результата система управления содержит задатчики углов тангажа, курса и крена, первый, второй и третий блоки сравнения, блок свободных гироскопов, блок демпфирующих гироскопов, датчики скорости и высоты полета, датчик текущего значения массы, задатчик опорных сигналов, первый и второй блоки умножения, первый и второй блоки деления, сумматор, блок формирования обратной величины сигнала, блок масштабирования, цифровой блок умножения, цифроаналоговый преобразователь, цифроаналоговый блок умножения, первый, второй и третий суммирующие усилители и исполнительное устройство. 2 ил.
Бортовая цифроаналоговая адаптивная система управления летательным аппаратом, содержащая последовательно соединенные задатчик угла тангажа и первый блок сравнения, второй блок сравнения, последовательно соединенные задатчик угла крена и третий блок сравнения, а также блок свободных гироскопов, блок демпфирующих гироскопов, исполнительное устройство и первый, второй и третий суммирующие усилители, выходы которых соединены с первым, вторым и третьим входами исполнительного устройства соответственно, причем вторые входы первого, второго и третьего блоков сравнения соединены, соответственно, с первым, вторым и третьим выходами блока свободных гироскопов, отличающаяся тем, что она содержит последовательно соединенные датчик скорости полета, первый блок умножения, второй вход которого также соединен с выходом датчика скорости полета, второй блок умножения, сумматор, блок формирования обратной величины сигнала и блок масштабирования, последовательно соединенные датчик высоты полета и первый блок деления, выход которого подключен ко второму входу сумматора, последовательно соединенные датчик текущего значения массы и второй блок деления, выход которого подключен к третьему входу сумматора, задатчик опорных сигналов, первый, второй и третий выходы которого подсоединены, соответственно, ко второму входу второго блока умножения, второму входу первого блока деления и второму входу второго блока деления, задатчик угла курса, подключенный выходом к первому входу второго блока сравнения, цифровой блок умножения, первый, второй и третий входы которого подсоединены, соответственно, к выходам первого, второго и третьего блоков сравнения, четвертый, пятый и шестой входы подключены, соответственно, к первому, второму и третьему выходам блока масштабирования, а первый, второй и третий выходы соединены, соответственно, с первым, вторым и третьим входами цифроаналогового преобразователя, первый, второй и третий выходы которого подсоединены к первым входам, соответственно, первого, второго и третьего суммирующих усилителей, и цифроаналоговый блок умножения, первый, второй и третий входы которого подключены, соответственно, к первому, второму и третьему выходам блока демпфирующих гироскопов, четвертый, пятый и шестой входы соединены, соответственно, с четвертым, пятым и шестым выходами блока масштабирования, а первый, второй и третий выходы соединены со вторыми входами, соответственно, первого, второго и третьего суммирующих усилителей.
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ СИГНАЛОВ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2238582C1 |
| Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов | |||
| /Под ред | |||
| Г.С.БЮШГЕНСА | |||
| - М.: Наука, Физматлит, 1998 | |||
| В.А.БОДНЕР | |||
| Теория автоматического управления полетом | |||
| - М.: Наука, 1964, с.178 | |||
| МИХАЛЕВ И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174. | |||

