Изобретение относится к бортовым устройствам для систем автоматического управления беспилотными летательными аппаратами (БПЛА).
Известный способ включает в себя задание сигнала углового положения, измерение сигнала углового положения, измерение сигнала угловой скорости, усиление сигналов рассогласования и угловой скорости, суммирование полученных сигналов и фильтрацию суммарного сигнала [1].
Известна система автоматического управления БПЛА, в которой содержатся блок задающего воздействия, измерители угла и угловой скорости, блок вычитания, суммирующий усилитель, противоизгибный фильтр [1].
Недостатками известного способа и системы управления являются ограниченность функциональных возможностей в условиях значительных рассогласований, обусловленных факторами значительных внешних возмущений типа аэродинамической интерференции, ветровых порывов, ударной волны, разбросами параметров ЛА и др. а также техническими ограничениями уровней процессов, что особенно характерно для интервала времени отхода БПЛА от носителя. Отмеченные факторы снижают выполнение задачи БПЛА в целом.
Наиболее близким решением является способ и система формирования сигнала управления БПЛА по [2]. Способ состоит в том, что задают сигнал углового положения, измеряют сигнал углового положения, измеряют сигнал угловой скорости, формируют сигнал рассогласования вычитанием из сигнала углового положения заданного сигнала углового положения управления, усиливают сигнал рассогласования, усиливают сигнал угловой скорости, формируют базовый сигнал управления суммированием усиленного сигнала рассогласования и усиленного сигнала текущей угловой скорости, формируют выходной сигнал управления посредством противоизгибной фильтрации базового сигнала управления.
Известная система управления (СУ) содержит последовательно соединенные задатчик сигнала углового положения, первый блок вычитания и первый усилитель, последовательно соединенные сумматор и противоизгибный фильтр, выход которого является выходом устройства, измеритель угла, выход которого соединен со вторым входом первого блока вычитания, и последовательно соединенные измеритель угловой скорости и второй усилитель, выход которого соединен с первым входом сумматора.
Недостатками известного решения являются ограниченные функциональные возможности в условиях существенного изменения условий полета по скорости и высоте, при аппаратурных ограничениях значений параметров цифроаналоговых элементов, наличии отказов по превышению сигналов углового рассогласования и других факторов, что снижает надежность СУ и может привести к срыву устойчивости и задачи в целом.
Технической задачей, решаемой в предлагаемых способе и устройстве, является повышение устойчивости процессов углового движения и расширение функциональных возможностей с учетом возникновения ситуаций при многофакторных условиях полета. Неотъемлемой составной частью синтеза контура угловой стабилизации является учет разбросов параметров и факторов упругости объекта. Предложенным построением обеспечивается функционально-логическое изменение параметров СУ при некорректном увеличении угловых координат, что обеспечивает повышение устойчивости и качества процессов.
Указанный технический результат достигается тем, что известный способ, состоящий в том, что задают сигнал углового положения, измеряют сигнал углового положения, измеряют сигнал угловой скорости, формируют сигнал рассогласования вычитанием из сигнала углового положения заданного сигнала углового положения, усиливают сигнал рассогласования, усиливают сигнал угловой скорости, формируют базовый сигнал управления суммированием усиленного сигнала рассогласования и усиленного сигнала угловой скорости, формируют выходной сигнал управления посредством противоизгибной фильтрации базового сигнала управления, дополняют тем, что выделяют сигнал модульной функции сигнала рассогласования, выделяют сигнал модульной функции заданного сигнала управления, формируют сигнал вычитания из сигнала модульной функции сигнала рассогласования, сигнал модульной функции заданного сигнала управления, задают первый пороговый сигнал, задают второй пороговый сигнал, при этом значение второго порогового сигнала составляет mε, где ε - значение первого порогового сигнала, а параметр m составляет m=0,7-0,9, формируют дополнительную компоненту сигнала рассогласования дополнительным его усилением при превышении сигнала вычитания над первым пороговым сигналом, полученную дополнительную компоненту вычитают из усиленного сигнала рассогласования и формируют реверсивное исключение дополнительной компоненты при значении сигнала вычитания меньше значения второго порогового сигнала, при этом коэффициент дополнительного усиления составляет ΔK1=(0,5-0,8)·K1, где K1 - коэффициент усиления сигнала рассогласования.
Указанный технический результат достигается и тем, что в известную систему управления, содержащую последовательно соединенные задатчик сигнала углового положения, первый блок вычитания и первый усилитель, последовательно соединенные сумматор и противоизгибный фильтр, выход которого является выходом устройства, измеритель угла, выход которого соединен со вторым входом первого блока вычитания, и последовательно соединенные измеритель угловой скорости и второй усилитель, выход которого соединен с первым входом сумматора, дополнительно введены последовательно соединенные первый формирователь модульной функции, вход которого соединен с выходом задатчика сигнала углового положения, второй блок вычитания, блок выделения сигнала положительной полярности, релейный элемент с зоной нечувствительности и гистерезисной характеристикой, управляемый ключ, второй вход которого соединен с выходом первого блока вычитания, третий усилитель и третий блок вычитания, второй вход которого соединен с выходом первого усилителя, а выход - со вторым входом сумматора, и второй формирователь модульной функции, вход которого соединен с выходом первого блока вычитания, а выход - со вторым входом второго блока вычитания.
Действительно, при этом обеспечивается отработка сигналов управления с максимальным качеством в широком диапазоне изменения высоты и скорости полета БПЛА.
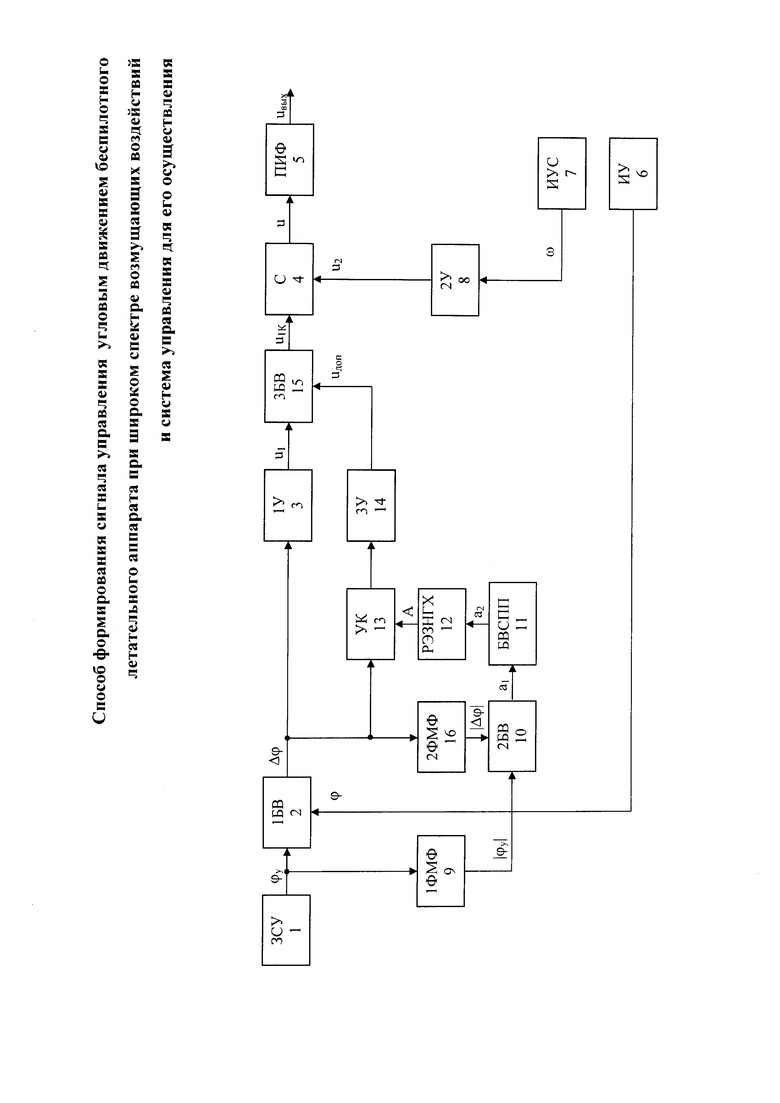
На чертеже представлена блок-схема системы управления с реализацией способа.
Система управления содержит последовательно соединенные задатчик сигнала углового положения 1 (ЗСУ), первый блок вычитания 2 (1БВ) и первый усилитель 3 (1У), последовательно соединенные сумматор 4 (С) и противоизгибный фильтр 5 (ПИФ), выход которого является выходом системы управления, измеритель угла 6 (ИУ), выход которого соединен со вторым входом первого блока вычитания 2, и последовательно соединенные измеритель угловой скорости 7 (ИУС) и второй усилитель 8 (2У), выход которого соединен с первым входом сумматора 4, последовательно соединенные первый формирователь модульной функции 9 (1ФМФ), вход которого соединен с выходом задатчика сигнала углового положения 1, второй блок вычитания 10 (2БВ), блок выделения сигнала положительной полярности 11 (БВСПП), релейный элемент с зоной нечувствительности и гистерезисной характеристикой 12 (РЭЗНГХ), управляемый ключ 13 (УК), второй вход которого соединен с выходом первого блока вычитания 2, третий усилитель 14 (ЗУ) и третий блок вычитания 15 (3БВ), второй вход которого соединен с выходом первого усилителя 3, а выход - со вторым входом сумматора 4, и второй формирователь модульной функции 16 (2ФМФ), вход которого соединен с выходом первого блока вычитания 2, а выход - со вторым входом второго блока вычитания 10.
Система управления с реализацией способа функционирует следующим образом.
Сигналы управления φу от задатчика 1 и текущего положения φ от датчика 6 поступают на блок вычитания 2, с выхода которого сигнал рассогласования Δφ:

поступает на первый усилитель 3, который формирует базовую компоненту сигнала управления по рассогласованию

где K1 - передаточный коэффициент усилителя 3.
Компонента сигнала управления u2 по угловой скорости формируется в усилителе 8:

где ω - сигнал угловой скорости, получаемый от датчика 7;
K2 - передаточный коэффициент по угловой скорости усилителя 8.
В сумматоре 4 компоненты сигнала управления суммируются, формируя сигнал u, который фильтруется противоизгибным фильтром 5, вырабатывая выходной сигнал устройства uвых.
Расчет значений передаточных коэффициентов K1 и K2 определен, исходя из обеспечения устойчивости и качества процессов. Управляемый ключ 13 разомкнут.
Возможно возникновение ситуации реально высоких по уровню значений сигналов управления φу от задатчика 1, превышающих регламентированные, и больших начальных значений рассогласований Δφ в блоке 2, вследствие чего в реальной аппаратуре, имеющей технические ограничения, возможен срыв устойчивого движения. Предложенным решением такая ситуация исключается следующим образом. Выделяются функции модулей сигналов φу и Δφ блоками 9 и 16 соответственно. Второй блок вычитания 10 формирует разность полученных сигналов

Блок 11 выделяет положительную составляющую а2 сигнала а1, свидетельствующую о превышении сигнала 

При превышении величины сигнала а2 над величиной зоны нечувствительности ε, соответствующей первому пороговому сигналу блока 12, в блоке 12 вырабатывается сигнал А, обеспечивающий замыкание ключа 13, включая дополнительную компоненту сигнала управления по рассогласованию Δφ через третий усилитель 14 с коэффициентом ΔK1 к третьему блоку вычитания 15. На выходе блока 15 формируют сигнал u1k, равный

Сигнал u1k поступает на сумматор 4, на выходе которого формируется сигнал u, равный

Сигнал и фильтруется противоизгибным фильтром 5, на выходе которого имеет место выходной сигнал СУ uвых.
Необходимо отметить, что решение в рассмотренной ситуации основано на уменьшении общего коэффициента сигнала рассогласования, который становится равным (K1-ΔK1). При этом ΔK1=(0,5÷0,8)·K1. Такое решение позволяет находиться в области устойчивости с большим удалением от границы устойчивости.
В дальнейшем при отработке заданного сигнала φу сигнал Δφ уменьшается и при достижении сигнала а2 меньше величины mε, соответствующей второму пороговому сигналу, где m=0,7-0,9, блока 12 сигнал А становится равным 0, ключ 13 размыкается, восстанавливая общий передаточный коэффициент по Δφ, равный K1, т.е. восстанавливая расчетно регламентированное качество работы системы управления по устойчивости, динамическому качеству и статической точности. Воспользоваться изменением коэффициента K2 блока 8 невозможно в условиях управления БПЛА с учетом упругих колебаний во избежание выхода за границу области устойчивости.
Предложенные способ и система управления несложно реализуются на элементах автоматики и вычислительной техники, например, по [3, 4] и алгоритмически.
Предложенные способ формирования сигнала управления и система для его осуществления решают проблему комплексно сложных ситуаций и повышают надежность работы.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. / Под ред. Г.С. Бюшгенса. М.: Наука. Физматлит, 1998, с. 443.
2. Патент РФ №2338236, 10.11.2008 г., кл. G05D 1/08.
3. В.Б. Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с. 22, 41.
4. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М., Машиностроение, 1981, с. 107, 126.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532719C1 |
| Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата | 2015 |
|
RU2611459C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2469373C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2473107C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339990C1 |
| Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления | 2016 |
|
RU2631718C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
Группа изобретений относится к способу формирования сигнала управления угловым движением беспилотного летательного аппарата (БПЛА) системе управления для этого способа. Для управления угловым движением БПЛА задают сигнал углового положения, измеряют сигнал углового положения и сигнал угловой скорости, путем вычитания заданного и измеренного сигналов углового положения формируют, а затем усиливают сигнал рассогласования, посредством противоизгибной фильтрации формируют выходной сигнал управления, используют два пороговых сигнала для формирования определенным образом дополнительной компоненты сигнала рассогласования и исключения ее соответственно. Система управления содержит задатчик сигнала углового положения, три блока вычитания, три усилителя, сумматор, противоизгибный фильтр, измеритель угла, измеритель угловой скорости, два формирователя модульной функции, блок выделения сигнала положительной полярности, релейный элемент с зоной нечувствительности и гистерезисной характеристикой, управляемый ключ, соединенные определенным образом. Обеспечивается устойчивость углового движения БПЛА. 2 н.п. ф-лы, 1 ил. 
1. Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий, состоящий в том, что задают сигнал углового положения, измеряют сигнал углового положения, измеряют сигнал угловой скорости, формируют сигнал рассогласования вычитанием из сигнала углового положения заданного сигнала углового положения, усиливают сигнал рассогласования, усиливают сигнал угловой скорости, формируют базовый сигнал управления суммированием усиленного сигнала рассогласования и усиленного сигнала угловой скорости, формируют выходной сигнал управления посредством противоизгибной фильтрации базового сигнала управления, отличающийся тем, что выделяют сигнал модульной функции сигнала рассогласования, выделяют сигнал модульной функции заданного сигнала углового положения, формируют сигнал вычитания из сигнала модульной функции сигнала рассогласования, сигнал модульной функции заданного сигнала углового положения, задают первый пороговый сигнал, задают второй пороговый сигнал, при этом значение второго порогового сигнала составляет mε, где ε - значение первого порогового сигнала, а значение параметра m составляет m=0,7-0,9, формируют дополнительную компоненту сигнала рассогласования дополнительным его усилением при превышении сигнала вычитания над первым пороговым сигналом, полученную дополнительную компоненту вычитают из усиленного сигнала рассогласования и формируют реверсивное исключение дополнительной компоненты при значении сигнала вычитания меньше значения второго порогового сигнала, при этом коэффициент дополнительного усиления составляет ΔК1=(0,5-0,8)·К1, где К1 - коэффициент усиления сигнала рассогласования.
2. Система управления для осуществления способа по п. 1, содержащая последовательно соединенные задатчик сигнала углового положения, первый блок вычитания и первый усилитель, последовательно соединенные сумматор и противоизгибный фильтр, выход которого является выходом устройства, измеритель угла, выход которого соединен со вторым входом первого блока вычитания, и последовательно соединенные измеритель угловой скорости и второй усилитель, выход которого соединен с первым входом сумматора, отличающаяся тем, что в нее дополнительно введены последовательно соединенные первый формирователь модульной функции, вход которого соединен с выходом задатчика сигнала углового положения, второй блок вычитания, блок выделения сигнала положительной полярности, релейный элемент с зоной нечувствительности и гистерезисной характеристикой, управляемый ключ, второй вход которого соединен с выходом первого блока вычитания, третий усилитель и третий блок вычитания, второй вход которого соединен с выходом первого усилителя, а выход - со вторым входом сумматора, и второй формирователь модульной функции, вход которого соединен с выходом первого блока вычитания, а выход - со вторым входом второго блока вычитания.
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| БОРТОВАЯ СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2338236C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459744C1 |
| US 7706932 B2, 27.04.2010. | |||

