Изобретение относится к области бортовых систем автоматического управления существенно нестационарными беспилотными летательными аппаратами (ЛА).
Известны способы и системы управления и стабилизации углового положения ЛА. Например, «Способ формирования адаптивного сигнала управления угловым движением нестационарного летательного аппарата» (Патент РФ 2338235, опубликовано 10.11.2008, дата подачи заявки 27.04.2007) [1]. В этом способе задают опорный сигнал углового положения, формируют сигнал рассогласования между заданным сигналом и текущим сигналом углового положения. Формируют сигнал управления, равный сумме компонент сигналов рассогласования и угловой скорости. Измеряют сигнал скоростного напора и формируют сигнал адаптации посредством пропорционального масштабирования сигнала скоростного напора.
Недостатками этого способа, служащего аналогом, являются ограниченность функциональных возможностей управления в связи с отсутствием интегральной компоненты в законе управления ЛА.
Наиболее близким к предлагаемому изобретению, выбранный в качестве прототипа, является «Способ формирования интегрального адаптивного сигнала стабилизации планирующего движения беспилотного летательного аппарата и устройство для его осуществления» (Патент РФ 2460113, опубликовано 27.08.2012, бюллетень №24, дата подачи заявки 02.03.2011) [2].
Способ по [2] состоит в том, что задают сигнал управления, измеряют сигналы углового положения и угловой скорости, формируют сигнал рассогласования между заданным сигналом управления и измеренным сигналом углового положения, усиливают сигналы рассогласования и угловой скорости, формируют сигнал суммы усиленных сигналов рассогласования и угловой скорости, формируют сигнал интегральной компоненты интегрированием логически управляемого сигнала рассогласования, масштабируют сигнал интегральной компоненты, ограничивают масштабированный сигнал интегральной компоненты и суммируют сигнал суммы усиленных сигналов рассогласования и угловой скорости с ограниченным масштабированным сигналом интегральной компоненты, измеряют и масштабируют сигнал скоростного напора, при этом ограничение масштабированного сигнала интегральной компоненты формируют с уровнем в обратно пропорциональной зависимости от масштабированного измеренного сигнала скоростного напора, задают опорный сигнал, формируют сигнал модульной функции от сигнала интегральной компоненты, формируют сигнал логического управления отличным от нуля при превышении сигнала модульной функции над заданным опорным сигналом и при одинаковых по знаку сигналах рассогласования и интегральной компоненты и равным нулю при сигнале модульной функции, меньшем или равном заданному опорному сигналу, формируют логически управляемый сигнал рассогласования равным сигналу рассогласования при сигнале логического управления, равном нулю, и формируют выходной сигнал управления путем ограничения суммированного сигнала.
Устройство для осуществления изложенного выше способа формирования интегрального адаптивного сигнала стабилизации планирующего движения беспилотного летательного аппарата содержит измеритель угла, измеритель угловой скорости, последовательно соединенные задатчик сигнала управления, элемент сравнения, второй вход которого соединен с выходом измерителя угла, суммирующий усилитель, второй вход которого соединен с выходом измерителя угловой скорости, сумматор и ограничитель сигнала, выход которого является выходом устройства, последовательно соединенные задатчик опорного сигнала, логический блок сравнения, второй вход которого соединен с выходом элемента сравнения, а третий вход - с выходом интегрирующего усилителя, управляемый ключ, сигнальный вход которого также соединен с выходом элемента сравнения, интегрирующий усилитель и формирователь сигнала модульной функции, выход которого соединен с четвертым входом логического блока сравнения, и последовательно соединенные датчик скоростного напора, масштабный усилитель и функциональный нелинейный элемент с управляемым ограничением, выход которого подключен ко второму входу сумматора, а второй вход соединен с выходом интегрирующего усилителя.
Существенными признаками прототипа-способа, совпадающими с существенными признаками предлагаемого технического решения, являются следующие. Задание сигнала управления, измерение сигналов углового положения и угловой скорости, формирование сигнала рассогласования между заданным сигналом управления и измеренным сигналом углового положения, формирование сигнала интегральной компоненты интегрированием логически управляемого сигнала рассогласования, измерение сигнала скоростного напора, задание опорного сигнала, формирование сигнала модульной функции от сигнала интегральной компоненты, формирование сигнала логического управления отличным от нуля при превышении сигнала модульной функции над заданным опорным сигналом и при одинаковых знаках сигнала рассогласования и сигнала интегральной компоненты и равным нулю при сигнале модульной функции, меньшем или равном заданному опорному сигналу, формирование логически управляемого сигнала рассогласования равным сигналу рассогласования при сигнале логического управления, равном нулю, и формирование выходного сигнала управления ограничением суммарного сигнала.
Существенными признаками прототипа-устройства, совпадающими с существенными признаками предлагаемого технического решения, являются следующие: измеритель углового положения, измеритель угловой скорости и интегрирующий усилитель, последовательно соединенные задатчик сигнала управления, элемент сравнения, второй вход которого соединен с выходом измерителя углового положения, последовательно соединенные сумматор и ограничитель сигнала, выход которого является выходом устройства, датчик скоростного напора, последовательно соединенные задатчик опорного сигнала, логический блок сравнения, второй вход которого соединен с выходом элемента сравнения, а третий вход - с выходом интегрирующего усилителя, управляемый ключ, сигнальный вход которого соединен с выходом элемента сравнения, интегрирующий усилитель и формирователь сигнала модульной функции, выход которого подключен к четвертому входу логического блока сравнения.
Недостатками способа и устройства, принятого за прототип, являются ограниченность функциональных возможностей управления и невысокая точность в условиях существенной нестационарности динамических характеристик ЛА, обусловленной изменениями высоты и скорости полета.
Решаемой в предлагаемом техническом решении (способе и устройстве) задачей является расширение функциональных возможностей управления летательным аппаратом и повышение точности управления в условиях широкого диапазона изменения высоты и скорости полета ЛА и действия в полете возмущающих факторов.
Для решения этой задачи в способе формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата, включающем задание сигнала управления, измерение сигнала углового положения и угловой скорости, формирование сигнала рассогласования между заданным сигналом управления и измеренным сигналом углового положения, формирование сигнала интегральной компоненты интегрированием логически управляемого сигнала рассогласования, измерение сигнала скоростного напора, задание опорного сигнала, формирование сигнала модульной функции от сигнала интегральной компоненты, формирование сигнала логического управления отличным от нуля при превышении сигнала модульной функции над заданным опорным сигналом и при одинаковых знаках сигнала рассогласования и сигнала интегральной компоненты и равным нулю при сигнале модульной функции, меньшем или равном заданному опорному сигналу, формирование логически управляемого сигнала рассогласования равным сигналу рассогласования при сигнале логического управления, равном нулю, и формирование выходного сигнала управления путем ограничения суммарного сигнала, дополнительно вводят адаптацию передаточных чисел контуров управления и стабилизации в функции скоростного напора, а именно:
- Формируют сигнал адаптации посредством масштабирования сигнала скоростного напора и ограничивают масштабированный сигнал по закону

где Kм - коэффициент масштабирования,

здесь Kпр - коэффициент пропорциональности, mδ - производная аэродинамического коэффициента эффективности по отклонению рулей, s - площадь крыла летательного аппарата, l - его длина, I - осевой момент инерции летательного аппарата;
- Формируют передаточные числа по сигналам рассогласования, угловой скорости и интегральной компоненты обратно пропорциональными величине сигнала адаптации по законам

при этом константы Kпр, Kϑ, 

Целесообразность законов адаптации вида (3) показана в [2].
Для расширения функциональных возможностей устройства, реализующего способ, и повышения точности управления в устройство, содержащее измеритель углового положения, измеритель угловой скорости и интегрирующий усилитель, последовательно соединенные задатчик сигнала управления и элемент сравнения, второй вход которого соединен с выходом измерителя углового положения, последовательно соединенные сумматор и ограничитель сигнала, выход которого является выходом устройства, датчик скоростного напора, последовательно соединенные задатчик опорного сигнала, логический блок сравнения, второй вход которого соединен с выходом элемента сравнения, ключ, сигнальный вход которого также соединен с выходом элемента сравнения, интегрирующий усилитель, выход которого подключен к третьему входу логического блока сравнения, и формирователь сигнала модульной функции, выход которого подключен к четвертому входу логического блока сравнения, дополнительно введены функциональный ограничитель сигнала скоростного напора, вход которого соединен с выходом датчика скоростного напора, первый, второй и третий блоки деления, входы которых подключены к выходу функционального ограничителя сигнала скоростного напора, и первый, второй и третий блоки умножения, первые входы которых соединены с выходами первого, второго и третьего блоков деления соответственно, вторые входы подключены к выходам элемента сравнения, измерителя угловой скорости и интегрирующего усилителя соответственно, а выходы - к первому, второму и третьему входам сумматора.
Отличительными признаками предлагаемого технического решения - способа формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата - является то, что формируют сигнал адаптации посредством масштабирования сигнала скоростного напора и ограничивают масштабированный сигнал скоростного напора по закону
где Kм - коэффициент масштабирования,
здесь Kпр - коэффициент пропорциональности, mδ - производная аэродинамического коэффициента эффективности по отклонению рулей, s - площадь крыла летательного аппарата, l - его длина, I - осевой момент инерции, и формируют передаточные числа по сигналам рассогласования, угловой скорости и интегральной компоненты обратно пропорциональными величине сигнала адаптации по законам
при этом константы Kпр, Kϑ,
σΣ=k1·Δϑ+k2·ωz+k3·σu.
Отличительными признаками предлагаемого технического решения - устройства формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата - является то, что в него введены функциональный ограничитель сигнала скоростного напора, вход которого соединен с выходом датчика скоростного напора, первый, второй и третий блоки деления, входы которых подключены к выходу функционального ограничителя сигнала скоростного напора, и первый, второй и третий блоки умножения, первые входы которых соединены с выходами первого, второго и третьего блоков деления соответственно, вторые входы подключены к выходам элемента сравнения, измерителя угловой скорости и интегрирующего усилителя соответственно, а выходы - к первому, второму и третьему входам сумматора.
Предложенные способ формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата и устройство для его осуществления, как показывает проведенное математическое моделирование, позволяют расширить функциональные возможности управления летательным аппаратом, так как дают возможность производить стабилизацию балансировочного состояния ЛА с оптимальными отклонениями рулей в условиях широкого диапазона изменения скорости и высоты полета, а также повысить при этом точность управления за счет того, что передаточные числа контура стабилизации и управления адаптивно изменяются с изменением главного фактора, определяющего динамические свойства ЛА - скоростного напора.
По существу, сформированы три взаимосвязанных канала, включающие управление медленным балансировочным, быстрым маневренным движением ЛА и обеспечение адаптации - изменение передаточных чисел контуров управления и стабилизации ЛА в функции скоростного напора.
Способ формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата и устройство для его осуществления могут найти применение в системах управления маневренными летательными аппаратами, к которым предъявляются достаточно высокие требования по точности управления при ограниченных энергетических или динамических ресурсах исполнительных органов систем управления и которые должны функционировать в условиях широкого диапазона высот и скоростей полета, а также действия возмущающих факторов.
Предлагаемые технические решения поясняются чертежами:
Фиг.1. Блок-схемами устройства;
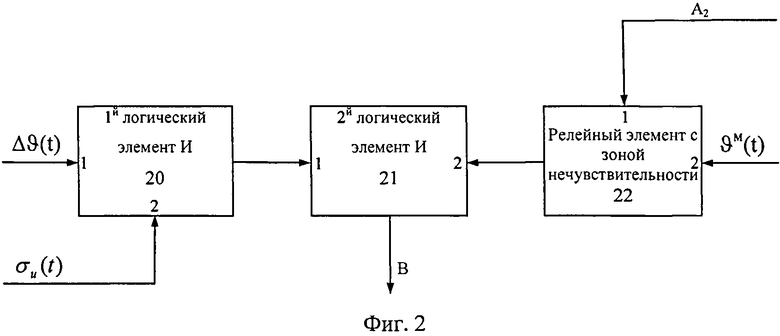
Фиг.2. Логический блок сравнения.
Устройство (фиг.1) содержит измеритель углового положения 1, измеритель угловой скорости 2, последовательно соединенные задатчик сигнала управления 3 и элемент сравнения 4, второй вход которого соединен с выходом измерителя углового положения 1, последовательно соединенные сумматор 5 и ограничитель сигнала 6, выход которого является выходом устройства, последовательно соединенные датчик скоростного напора 7 и функциональный ограничитель сигнала 8, первый 9, второй 10 и третий 11 блоки деления, входы которых подключены к выходу функционального ограничителя сигнала 8, и первый 12, второй 13 и третий 14 блоки умножения, первые входы которых соединены с выходами первого 9, второго 10 и третьего 11 блоков деления соответственно, вторые входы подключены к выходам элемента сравнения 4, измерителя угловой скорости 2 и интегрирующего усилителя 15 соответственно, а выходы - к первому, второму и третьему входам сумматора 5, последовательно соединенные задатчик опорного сигнала 16, логический блок сравнения 17, второй вход которого соединен с выходом элемента сравнения 4, ключ 18, сигнальный вход которого также соединен с выходом элемента сравнения 4, интегрирующий усилитель 15, выход которого подключен также к третьему входу логического блока сравнения 17, и формирователь сигнала модульной функции 19, выход которого подключен к четвертому входу логического блока сравнения 17.
Блок-схема логического блока сравнения 17 (фиг.2) содержит последовательно соединенные первый логический элемент И 20, первый вход которого подключен к выходу элемента сравнения 4, а второй вход - к выходу интегрирующего усилителя 15, и второй логический элемент И 21, выход которого соединен с первым (управляющим) входом ключа 18, а также релейный элемент с зоной нечувствительности 22, первый вход которого подключен к выходу задатчика опорного сигнала 16, второй вход - к выходу формирователя сигнала модульной функции 19, а выход - ко второму входу второго логического элемента 21.
Таким образом, устройство формирования адаптивного сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата содержит три взаимосвязанных канала:
1. канал управления быстрым маневренным движением летательного аппарата, в состав которого входят звенья 1…6;
2. канал управления медленным балансировочным движением ЛА, в состав которого входят звенья 15…19;
3. канал адаптации, обеспечивающий изменение передаточных чисел по сигналам рассогласования, угловой скорости и интегральной компоненты в функции скоростного напора, в состав этого канала входят звенья 7…14.
Устройство формирования адаптивного сигнала управления и стабилизации продольно-балансировочного движения летательного аппарата с реализацией предложенного способа работает следующим образом.
Задатчиком сигнала управления 3 формируется (задается) сигнал управления ϑзад(t), составными компонентами которого являются:
- медленная компонента ϑзад.м(t), соответствующая медленным разворотам ЛА с балансировочными углами атаки αбал и балансировочными углами отклонения рулей δбал;
- быстрая компонента ϑзад.б(t), соответствующая маневренным разворотам ЛА.
Таким образом,

Закон управления и стабилизации ЛА формируется по сигналам управления ϑзад(t), углового положения ϑ(t) и угловой скорости ωz(t). Основная компонента сигнала управления σΣ(t) формируется в сумматоре 5 в виде (4):
σΣ=k1·Δϑ+k2·ωz+k3·σu
где Δϑ - сигнал рассогласования,

формируемый элементом сравнения 4 по сигналам ϑзад(t) от задатчика 3 и ϑ(t) от измерителя углового положения 1;
k1, k2, k3 - передаточные числа конура стабилизации и управления;
ωz - сигнал угловой скорости ЛА, поступающий от измерителя угловой скорости 2, 
σu(t) - сигнал интегральной компоненты, формируемый интегрирующим усилителем 15 по логически управляемому сигналу рассогласования Δϑлу(t), который определяется по логике, изложенной далее. Таким образом,

Выходной сигнал сумматора 5 σΣ(t) ограничивается ограничителем сигнала 6 до уровня A1 и является выходным сигналом устройства σвых(t):

Уровень ограничения, установленный на ограничителе 6, определяет предельную величину сигнала управления в рассматриваемом канале стабилизации и управления по тангажу, которую необходимо ограничивать, учитывая, что этими же рулями должны отрабатываться сигналы других каналов (курса и крена), здесь не рассматриваемых.
Для реализации заявленного в способе и устройстве адаптивного изменения передаточных чисел k1, k2, k3 сформирован специальный канал адаптации, включающий в себя датчик скоростного напора 7 и функциональный ограничитель сигнала 8, который формирует сигнал на выходе в соответствии с соотношениями (1), (2).
Передаточные числа по сигналам рассогласования, угловой скорости и интегральной компоненты формируются в блоках деления 9, 10, 11 обратно пропорциональными величине сигнала адаптации по законам (3).
Такое формирование передаточных чисел конура стабилизации и управления обеспечивает, в том числе, и ограничение величины сигнала интегральной компоненты (обратно пропорционально величине скоростного напора), как это делалось в прототипе [2]. Это соответствует реальной необходимости: при большем скоростном напоре требуется меньшее значение δбал и, соответственно, меньший сигнал интегральной компоненты σu(t).
Введение канала управления медленным балансировочным движением ЛА, т.е. канала ограничения сигнала интегральной компоненты - блоков 15…19 - обеспечивает отработку балансировочной, медленной компоненты сигнала управления ϑзад.м(t). Действительно, пусть ϑзад.б=0; ϑзад.м≠0. Тогда в силу того, что закон формирования выходного сигнала представленного устройства является астатическим законом нулевого порядка, установившееся значение сигнала рассогласования для такого режима равно нулю:

Тогда, в соответствии с (6) установившееся значение ϑуст:

Видно также, что для этого режима 
При поступлении на вход прямой цепи устройства (блоки 4, 5, 6) быстрой компоненты сигнала управления ϑзад.б(t) для управления маневром ЛА отработка его будет осуществляться относительно балансировочного движения ЛА, что повышает точность отработки управляющих воздействий в целом.
Логический управляющий канал, включающий в себя блоки 16…19, обеспечивает режим интегрирования логически управляемого сигнала рассогласования Δϑлу(t) интегрирующим усилителем 15 в пределах диапазона, определенного величинами 
Величина A2, выставляемая в задатчике опорного сигнала 16 и определяющая ограничение расходов рулей на стабилизацию балансировочного режима, может быть принята равной 
Логика формирования логически управляемого сигнала рассогласования Δϑлу(t) состоит в следующем.
В блоке выделения сигнала модульной функции 19 формируется сигнал

Логический блок сравнения 17, структура которого представлена на фиг.2, формирует сигнал логического управления B. При превышении сигналом модульной функции ϑм с выхода блока 19 заданного опорного сигнала A2 с выхода блока 16 (это проверяется в релейном элементе с зоной нечувствительности 22) и при одинаковых знаках сигнала рассогласования Δϑ(t), формируемого элементом сравнения 4, и сигнала интегральной компоненты σи(t), формируемого интегрирующим усилителем 15 (это проверяется в первом логическом элементе И 20) формируется значение сигнала логического управления B=1.
Таким образом, логический элемент сравнения 17 реализует следующий алгоритм формирования сигнала логического управления В:

При B=1 ключ 18 отключает сигнал рассогласования Δϑ(t) с выхода элемента сравнения 4 от входа интегрирующего усилителя 15 и прекращает тем самым дальнейшее его интегрирование:

Введение вместе с адаптивным изменением передаточного числа k3 по сигналу интегральной компоненты еще и ограничения сигнала интегральной компоненты σu(t) с «плавающим» значением ограничения (в диапазоне 
Таким образом, предложенные адаптивный способ формирования сигнала управления и стабилизации углового движения ЛА и устройство для его осуществления позволяют расширить функциональные возможности управления летательным аппаратом и повысить точность управления в условиях нестационарности ЛА и действия возмущающих факторов. Сформированы три взаимосвязанных канала, сочетающие в целом управление медленным балансировочным и быстрым маневренным движением ЛА, стабилизацию его относительно балансировочного режима и адаптацию передаточных чисел конура стабилизации и управления в функции от скоростного напора.
Способ формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата и устройство для его осуществления могут найти применение, например, в системах управления маневренными летательными аппаратами в условиях широкого диапазона изменения условий полета, к которым одновременно предъявляются достаточно высокие требования по точности управления и по быстродействию.
Положительный эффект предложения подтвержден результатами математического моделирования.
Все составные операции способа, звенья и блоки устройства управления могут быть выполнены на современных элементах автоматики и вычислительной техники [3], а также программно-алгоритмически в бортовых вычислительных машинах.
Источники информации
1. Патент РФ 2338235, опубликован 10.11.2008, дата подачи заявки 27.04.2007 г.
2. Патент РФ 2460113, опубликован 27.08.2012, дата подачи заявки 02.03.2011 г.
3. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. - М.: Машиностроение, 1981 - с.103.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459744C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления | 2016 |
|
RU2631718C1 |
| Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата | 2015 |
|
RU2611459C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ НЕСТАЦИОНАРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338235C1 |
Изобретение относится к области приборостроения и может найти применение в бортовых системах автоматического управления летательными аппаратами. Техническим результатом является повышение точности управления летательным аппаратом. Устройство формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата дополнительно содержит функциональный ограничитель сигнала скоростного напора, первый, второй и третий блоки деления, в которых формируются передаточные числа по сигналам рассогласования, угловой скорости и интегральной компоненты, обратно пропорциональные величине сигнала адаптации, и первый, второй и третий блоки умножения. 2 н.п. ф-лы, 2 ил.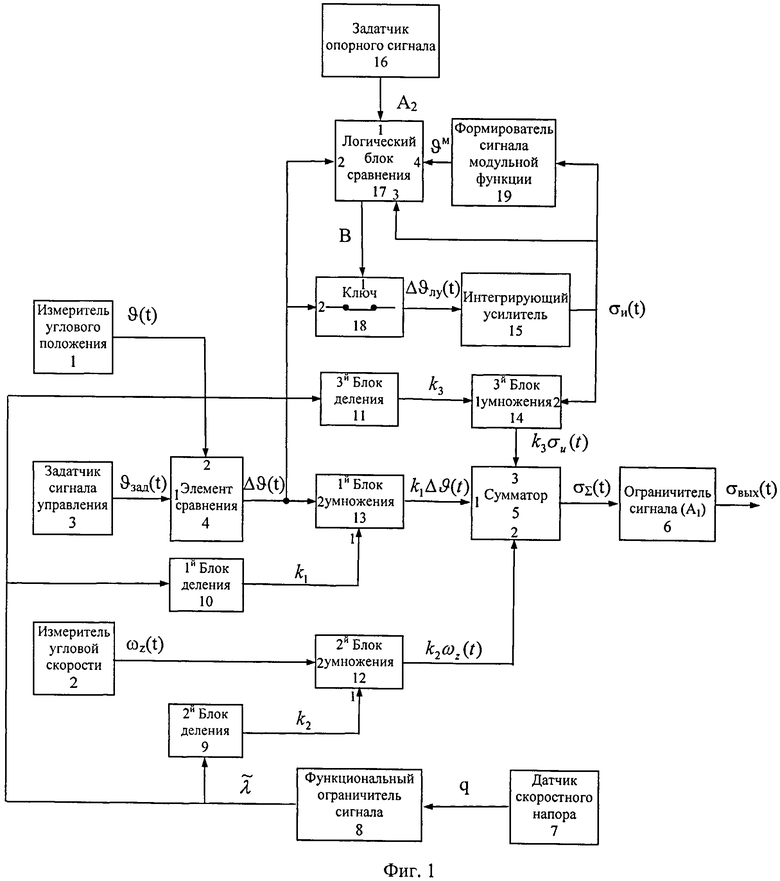
1. Способ формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата, включающий задание сигнала управления, измерение сигналов углового положения и угловой скорости, формирование сигнала рассогласования между заданным сигналом управления и измеренным сигналом углового положения, формирование сигнала интегральной компоненты интегрированием логически управляемого сигнала рассогласования, измерение сигнала скоростного напора, задание опорного сигнала, формирование сигнала модульной функции от сигнала интегральной компоненты, формирование сигнала логического управления отличным от нуля при превышении сигнала модульной функции над заданным опорным сигналом и при одинаковых знаках сигнала рассогласования и сигнала интегральной компоненты и равным нулю при сигнале модульной функции, меньшем или равном заданному опорному сигналу, формирование логически управляемого сигнала рассогласования равным сигналу рассогласования при сигнале логического управления, равном нулю, а также формирование выходного сигнала управления ограничением суммарного сигнала, отличающийся тем, что формируют сигнал адаптации посредством масштабирования сигнала скоростного напора, ограничивают масштабированный сигнал скоростного напора по закону
где Kм - коэффициент масштабирования,
здесь Kпр - коэффициент пропорциональности, mδ - производная аэродинамического коэффициента эффективности по отклонению рулей, s - площадь крыла летательного аппарата, l - его длина, I - осевой момент инерции летательного аппарата, формируют передаточные числа по сигналам рассогласования, угловой скорости и интегральной компоненты обратно пропорциональными величине сигнала адаптации по законам



при этом константы Kпр, Kϑ, KωZ, K∫ определяются по условиям устойчивости и качества переходных процессов, а суммарный сигнал σΣ формируют суммированием сигнала рассогласования Δϑ, умноженного на передаточное число по сигналу рассогласования k1, сигнала угловой скорости ωz, умноженного на передаточное число по сигналу угловой скорости k2, и сигнала интегральной компоненты σu, умноженного на передаточное число по сигналу интегральной компоненты k3:
σΣ=k1·Δϑ+k2·ωz+k3·σu.
2. Устройство формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата, содержащее измеритель углового положения, измеритель угловой скорости и интегрирующий усилитель, последовательно соединенные задатчик сигнала управления и элемент сравнения, второй вход которого соединен с выходом измерителя углового положения, последовательно соединенные сумматор и ограничитель сигнала, выход которого является выходом устройства, датчик скоростного напора, последовательно соединенные задатчик опорного сигнала, логический блок сравнения, второй вход которого соединен с выходом элемента сравнения, а третий вход - с выходом интегрирующего усилителя, и ключ, сигнальный вход которого соединен с выходом элемента сравнения, а выход - с входом интегрирующего усилителя, и формирователь сигнала модульной функции, вход которого соединен с выходом интегрирующего усилителя, а выход - с четвертым входом логического блока сравнения, отличающееся тем, что оно содержит функциональный ограничитель сигнала скоростного напора, первый, второй и третий блоки деления, в которых формируются передаточные числа по сигналам рассогласования, угловой скорости и интегральной компоненты, обратно пропорциональные величине сигнала адаптации, и первый, второй и третий блоки умножения, при этом функциональный ограничитель сигнала скоростного напора подключен между выходом датчика скоростного напора и входами первого, второго и третьего блоков деления, первые входы первого, второго и третьего блоков умножения соединены с выходами первого, второго и третьего блоков деления соответственно, вторые входы первого, второго и третьего блоков умножения подключены к выходам элемента сравнения, измерителя угловой скорости и интегрирующего усилителя соответственно, а выходы первого, второго и третьего блоков умножения - к первому, второму и третьему входам сумматора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

