Предлагаемое техническое решение относится к области систем управления (СУ) летательными аппаратами (ЛА) и может быть использовано в авиационной и ракетной технике.
Известна система управления ЛА, которая осуществляет формирование траектории, навигацию, управление и стабилизацию ЛА, а также выдачу разовых команд на подсистемы ЛА [Козлов В.И. Системы автоматического управления летательными аппаратами, - М.: Машиностроение, 1979, стр. 53, 152], принятая за прототип. Эта система содержит первый, второй и третий усилители-формирователи каналов тангажа, курса и крена, входы которых соединены с входами системы по сигналам управления, сигналам свободных гироскопов и датчиков угловых скоростей в соответствующих каналах, блок кинематической разводки, состоящий из первого и второго инверторов и первого, второго и третьего сумматоров, причем выходы первого и второго инверторов соединены с первыми входами второго и третьего сумматоров соответственно, первый, второй и третий рулевые приводы, входы которых соединены с выходами первого, второго и третьего сумматоров соответственно. Все эти существенные признаки присутствуют и в предлагаемом техническом решении.
Такая система управления обеспечивает стабилизацию ЛА относительно центра масс, формирование траектории, а также выполнение заданного пространственного и временного графика полета (ПВГП) за счет управления как координатами ЛА в пространстве, так и скоростью его полета на отдельных участках, заданных поворотными пунктами маршрута (ППМ). Формируются также необходимые разовые команды на подсистемы ЛА.
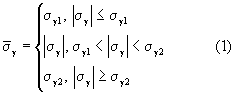
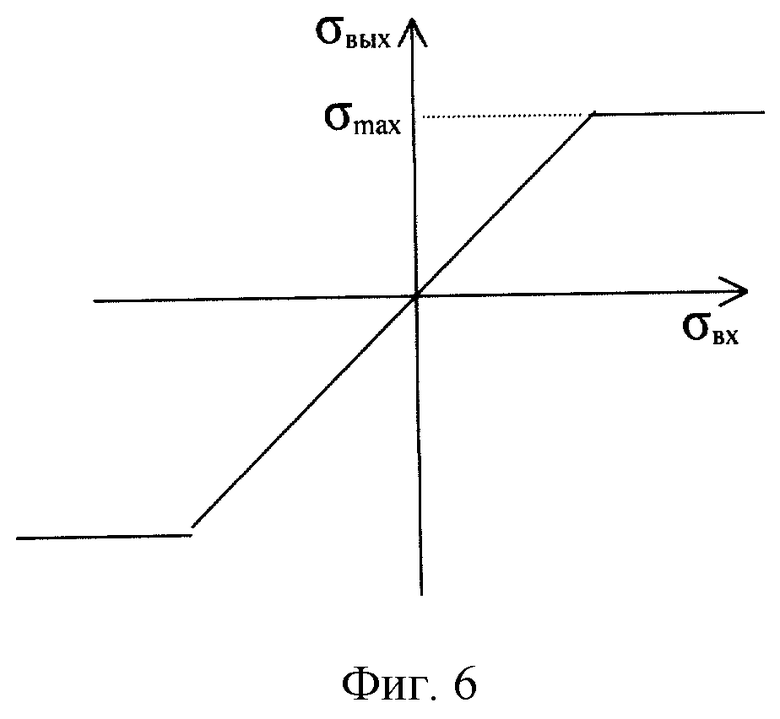
Существенным недостатком известной СУ является постоянство значений ограничений на поканальные управляющие сигналы σ ν , σ ψ , σ γ , эти ограничения обычно конструктивно реализуются выбором постоянных коэффициентов усиления усилителей-формирователей 1... 3 (фиг.1), либо введением между ними и сумматорами 14, 15, 16 ограничителей с постоянными нелинейными характеристиками вида, представленного на фиг.6.
На фиг.6 представлена типовая нелинейная характеристика звена системы управления, предназначенного для ограничения выходного сигнала звена на заданном постоянном уровне при неограниченной величине входного сигнала.
На фиг.6 обозначено:
σ вх - входной сигнал звена-ограничителя;
σ вых - выходной сигнал звена-ограничителя;
σ mах - заданный уровень ограничений.
В практике проектирования СУ обычно назначаются наибольшие допускаемые управляющие сигналы в канале крена, наименьшие - в канале курса (т.е. σ γmax&γτ;σ ν max&γτ;σ ψ max), поскольку ЛА наиболее динамичен по крену, а в канале курса потребные управляющие сигналы наименьшие.
Однако такое простое решение - назначение постоянных уровней ограничений - зачастую вносит заметное ухудшение в качество управления ЛА. Действительно, ограничение управляющих сигналов по тангажу и курсу и предоставление рулям возможности отрабатывать, в первую очередь, управляющие сигналы по крену, является необходимым на участках полета, на которых возникают существенные возмущения по крену, например, на участке старта беспилотного ЛА с самолета-носителя - для отработки интерференционных аэродинамических моментов при движении ЛА в непосредственной близости от самолета, на участках разворотов по курсу при координированном методе разворота. На больших же участках полета управляющие сигналы по крену невелики, и сохранение тех же жестких ограничений по тангажу и курсу нецелесообразно. Расширение ограничений по тангажу, например, может повысить динамичность ЛА в вертикальном канале, что улучшит качество управления при огибании рельефа местности. На участке наведения беспилотного ЛА на цель расширение ограничений по курсу и тангажу может привести к существенному уменьшению динамического промаха.
Технической задачей, на решение которой направлено предлагаемое изобретение, является повышение динамических свойств системы управления ЛА и расширение ее функциональных возможностей в различных условиях полета.
Для достижения указанного технического результата в состав СУ, содержащей первый, второй и третий усилители-формирователи каналов тангажа, курса и крена, входы которых соединены с входами системы по сигналам управления, сигналам свободных гироскопов и датчиков угловых скоростей в соответствующих каналах, блок кинематической разводки, состоящий из первого и второго инверторов и первого, второго и третьего сумматоров, причем выходы первого и второго инверторов соединены с первыми входами второго и третьего сумматоров соответственно, первый, второй и третий рулевые приводы, входы которых соединены с выходами первого, второго и третьего сумматоров соответственно, дополнительно введены первый, второй и третий функциональные преобразователи в каналах тангажа, курса и крена соответственно, первый, второй, третий и четвертый задатчики граничных параметров, а также компаратор, причем первый вход первого функционального преобразователя соединен с выходом первого усилителя-формирователя, а выход подключен ко вторым входам второго и третьего сумматоров, первый вход второго функционального преобразователя соединен с выходом второго усилителя-формирователя, а выход подключен к первому входу первого сумматора, третьему входу третьего сумматора и входу первого инвертора, первый вход третьего функционального преобразователя соединен с выходом третьего усилителя-формирователя, а выход подключен ко второму входу первого сумматора, третьему входу второго сумматора и входу второго инвертора, вторые входы первого, второго и третьего функциональных преобразователей соединены с выходом компаратора, первый вход которого подключен к выходу третьего усилителя-формирователя, а второй и третий входы - к выходам четвертого задатчика граничных параметров, причем третьи и четвертые входы первого, второго и третьего функциональных преобразователей соединены с выходами первого, второго и третьего задатчиков граничных параметров соответственно.
Отличительными признаками предлагаемой системы управления летательным аппаратом является наличие функциональных преобразователей, задатчиков граничных параметров и компаратора, а также то, что первый вход первого функционального преобразователя соединен с выходом первого усилителя-формирователя (в канале тангажа), а выход подключен ко вторым входам второго и третьего сумматоров, первый вход второго функционального преобразователя соединен с выходом второго усилителя-формирователя (в канале курса), а выход подключен к первому входу первого сумматора, третьему входу третьего сумматора и входу первого инвертора, первый вход третьего функционального преобразователя соединен с выходом третьего усилителя-формирователя (в канале крена), а выход подключен ко второму входу первого сумматора, третьему входу второго сумматора и входу второго инвертора, вторые входы первого, второго и третьего функциональных преобразователей соединены с выходом компаратора, первый вход которого подключен к выходу третьего усилителя-формирователя, а второй и третий входы - к выходам четвертого задатчика граничных параметров, причем третьи и четвертые входы первого, второго и третьего функциональных преобразователей соединены с выходами первого, второго и третьего задатчиков граничных параметров соответственно.
Благодаря наличию указанных отличительных признаков в совокупности с известными признаками (указанными в ограничительной части формулы изобретения), достигается следующий технический результат - при использовании предлагаемой системы управления на летательном аппарате появляется возможность на большей части траектории полета ЛА, когда расходы рулей по крену невелики, за счет расширения ограничений на управляющий сигнал канала тангажа повысить динамичность ЛА в вертикальном канале, что улучшит качество управления при полете с огибанием рельефа местности, а вместе с расширением ограничений на управляющий сигнал канала курса существенно уменьшается динамический промах при наведении ЛА на цель.
В результате поиска по источникам патентной и научно-технической информации решений, содержащих аналогичные признаки, не обнаружено. Это позволяет сделать заключение о том, что предложенное устройство не известно из уровня техники и, следовательно, соответствует критерию охраноспособности - “новое”.
На основании сравнительного анализа предложенного решения с известными в технике по источникам научно-технической и патентной информации можно утверждать, что между совокупностью признаков, в том числе - отличительных, выполняемыми ими функциями и достигаемой целью имеется неочевидная причинно-следственная связь. Поэтому можно сделать вывод о том, что предложенное решение не следует явным образом из достигнутого уровня техники и, следовательно, соответствует критерию охраноспособности - “изобретательский уровень”.
Предложенное техническое решение может найти применение в области авиации, в частности - в системах управления беспилотными ЛА для повышения их точностных характеристик.
Вышеописанная система управления летательным аппаратом поясняется чертежами.
На фиг.1-3 приведена функциональная схема предлагаемого устройства.
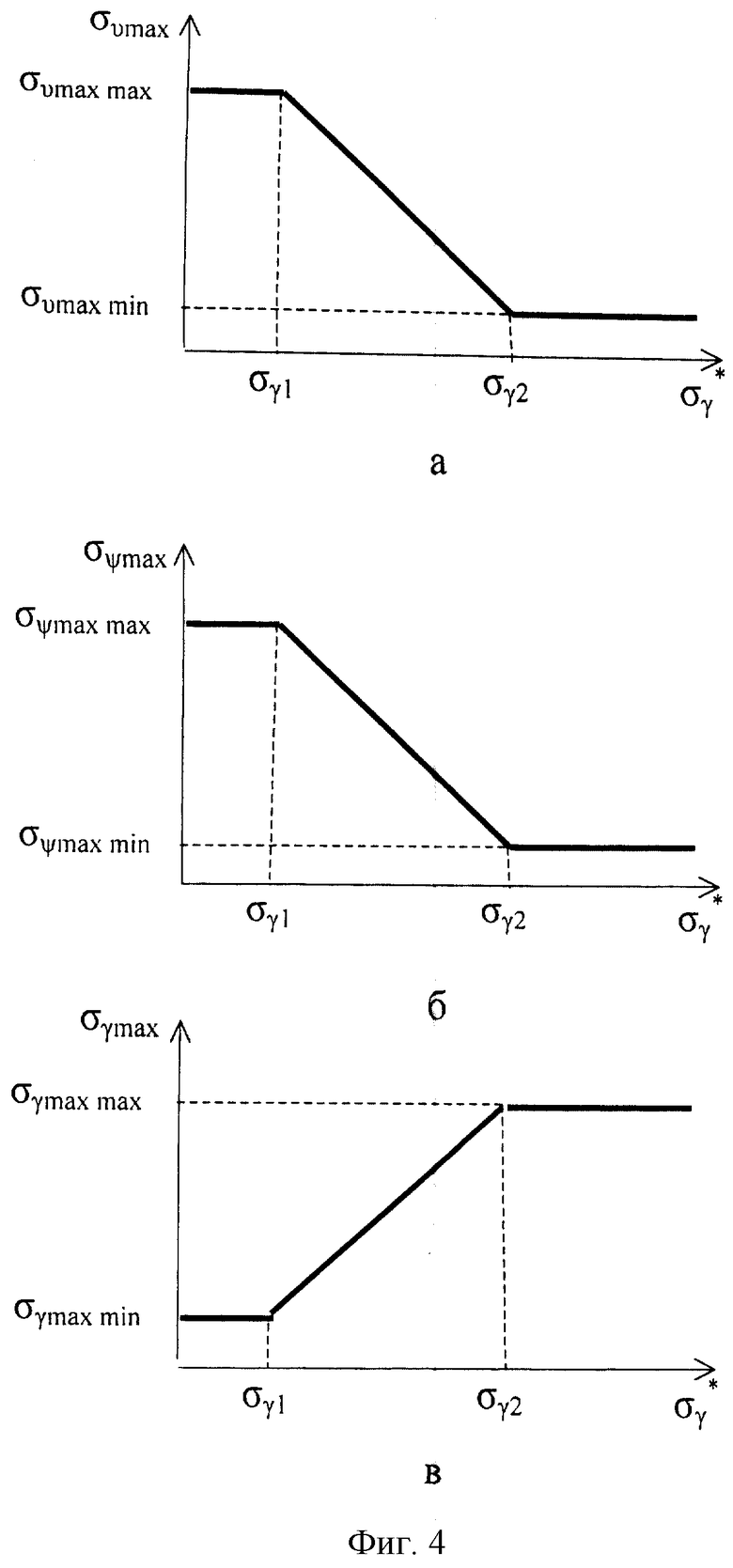
На фиг.4 представлены графики зависимостей:
- "а" - максимального сигнала канала тангажа от величины управляющего сигнала в канале крена;
- "б" - максимального сигнала канала курса от величины управляющего сигнала в канале крена;
- "в" - максимального сигнала канала крена от величины управляющего сигнала в канале крена;
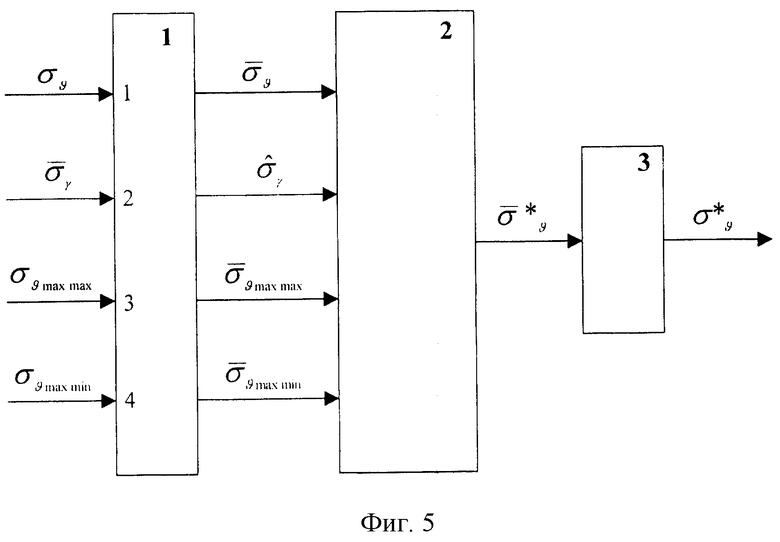
На фиг.5 приведена схема функциональных преобразователей каналов тангажа, курса и крена и компаратора.
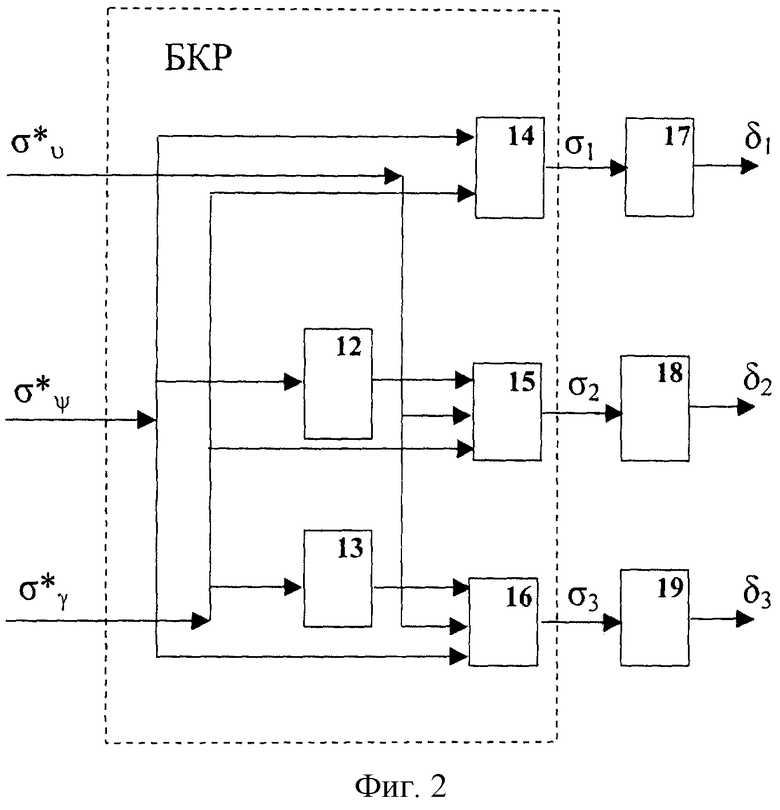
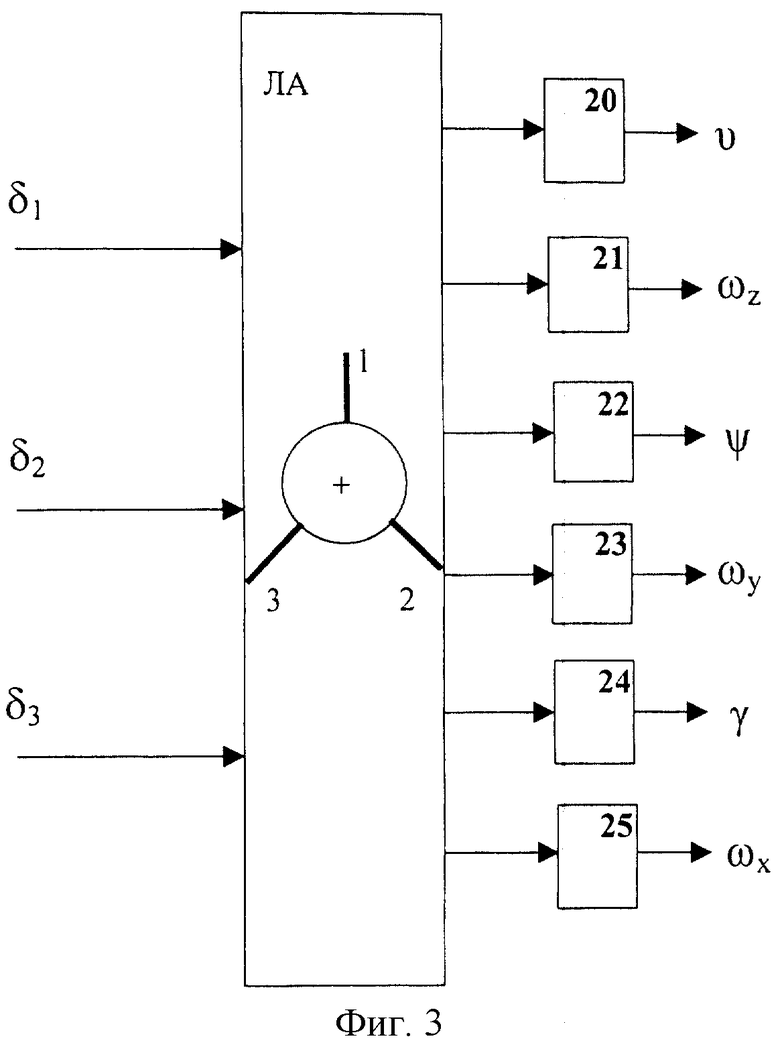
Представленная на фиг.1-3 система управления содержит усилители-формирователи каналов тангажа, курса и крена (1... 3), входы которых соединены с выходами системы по сигналам свободных гироскопов (20), (22), (24) и датчиков угловых скоростей (21), (23), (25) в соответствующих каналах и входами системы по сигналам управления, формируемым внешним контуром управления, а также блок кинематической разводки (БКР), включающий в себя инверторы (12, 13) и сумматоры (14... 16). Выходы сумматоров БКР соединены с входами соответствующих рулевых приводов (17... 19) летательного аппарата. Система отличается тем, что в нее дополнительно введены первый, второй, третий и четвертый задатчики граничных параметров сигналов (4... 7), компаратор (8), первый, второй и третий функциональные преобразователи (9... 11). При этом первые входы первого, второго и третьего функциональных преобразователей (9... 11) соединены с выходами усилителей-формирователей соответственно канала тангажа, курса и крена (1... 3), а их выходы - с входами сумматоров (14)...(16) и инверторов (12), (13) блока кинематической разводки. Первые и вторые выходы 1-го... 4-го задатчиков граничных параметров сигналов (4...7) соединены соответственно с третьими и четвертыми входами 1-го... 3-гo функциональных преобразователей (9... 11) и вторым и третьим входами компаратора (8), первый вход которого подсоединен к выходу усилителя-формирователя канала крена (3), а выход компаратора (8) подключен к вторым входам 1-го... 3-го функциональных преобразователей (9... 11).
На фиг.1-3 обозначено:
υ , ψ , γ - сигналы свободных гироскопов каналов тангажа, курса и крена соответственно;
ω z, ω y, ω x - сигналы датчиков угловых скоростей каналов тангажа, курса и крена соответственно;
ν y, ψ y, γ у - управляющие сигналы по углам тангажа, курса и крена;
σ ν , σ ψ , σ γ - поканальные управляющие сигналы;
σ ν maxmax, σ ν maxmin, σ ψ maxmax, σ ψ maxmin, σ γ maxmin, σ γ maxmax,
σ γ 1, σ y2 - выходные сигналы задатчиков граничных параметров сигналов;
 - выходной сигнал компаратора;
- выходной сигнал компаратора;
σ * ν , σ * ψ , σ * γ - выходные сигналы функциональных преобразователей;
σ 1, σ 2, σ 3 - управляющие сигналы первого, второго и третьего рулей соответственно;
δ 1, δ 2, δ 3 - углы отклонения первого, второго и третьего рулей соответственно.
Предлагаемая система функционирует следующим образом.
Датчики информации (20)...(25) обеспечивают измерение углов (υ , ψ , γ ) и угловых скоростей (ω Z, ω у, ω х) ЛА при его движении относительно центра масс. На основании этих данных, в соответствии с заданными координатами поворотных пунктов маршрута (ППМ), внешний контур управления по заложенным в нем алгоритмам формирует управляющие сигналы по углам тангажа ν y, курса ψ у и крена γ у. Эти сигналы поступают на входы усилителей-формирователей (1)...(3).
Усилители-формирователи каналов тангажа, курса и крена, складывая разности сигналов (ν -υ у), (ψ -ψ у), (γ -γ у), умноженные на соответствующие позиционные передаточные числа, с сигналами ω z, ω у, ω х, также умноженными на соответствующие передаточные числа, формируют поканальные управляющие сигналы σ ν , σ ψ , σ γ .
Эти сигналы поступают на первые входы вновь введенных функциональных преобразователей (9)...(11). На вторые и третьи входы этих функциональных преобразователей подаются выходные сигналы задатчиков граничных параметров (4)...(6); выходные сигналы задатчика граничных параметров (7) поступают на второй и третий входы компаратора (8), на первый вход которого подается управляющий сигнал канала крена. Выходной сигнал компаратора (8), сформированный по закону
поступает на вторые входы функциональных преобразователей (9)...(11).
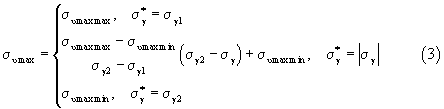
Функциональные преобразователи (9... 11) осуществляют преобразование поканальных управляющих сигналов по законам:
- в канале тангажа

- в канале курса



- в канале крена
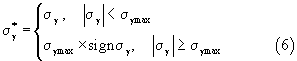
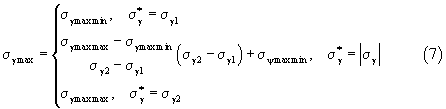
Графики зависимостей (3), (5), (7) представлены на фиг.4 "а", "б", "в".
Выходные сигналы функциональных преобразователей через сумматоры блока кинематической разводки распределяются по рулевым приводам летательного аппарата (17), (18), (19) в соответствии со схемой расположения рулевых поверхностей на ЛА (на фиг.1-3 приведена схема управления летательным аппаратом с тремя рулями).
Вновь введенные элементы - задатчики граничных параметров в каналах тангажа, курса и крена (4)...(7) - представляют собой стабилизированные источники постоянного напряжения; величина максимального (минимального) граничного параметра определяется при проектировании конкретной СУ и устанавливается на блоках (4)...(7) при изготовлении СУ или при подготовке ее к применению на ЛА.
Вновь введенные блоки предложенного устройства - компаратор (8) и функциональные преобразователи (9)...(11) - могут быть выполнены на современной элементной базе микроэлектроники - операционных усилителях, интегральных схемах. Пример реализации схемы функционального преобразователя канала тангажа (9) приведен на фиг.5. На схеме обозначено:
σ υ , σ ν max max, σ ν max min,  - входные аналоговые сигналы функционального преобразователя;
- входные аналоговые сигналы функционального преобразователя;
 ,
,  ,
,  ,
,  - входные сигналы, преобразованные в цифровую форму;
- входные сигналы, преобразованные в цифровую форму;
 - выходной сигнал функционального преобразователя в цифровом виде;
- выходной сигнал функционального преобразователя в цифровом виде;
 - выходной сигнал в аналоговом виде.
- выходной сигнал в аналоговом виде.
Блок аналого-цифровых преобразователей АЦП (1) и цифроаналоговый преобразователь ЦАП (3) - общеизвестные (стандартные) электронные устройства. Процессор П (2) - также стандартное электронно-цифровое вычислительное устройство, на котором реализованы уравнения (2), (3). Для компаратора (8), имеющего идентичную схему, в процессоре вместо уравнений (2), (3) реализуется уравнение (1). Для функциональных преобразователей каналов курса и крена в процессоре реализуются уравнения (4), (5) или (6), (7) соответственно.
Таким образом, функциональные преобразователи (9), (10), (11) и компаратор (8) реализованы на идентичных блоках, отличаются лишь уравнения, реализованные в процессоре.
Проведенные исследования показывают, что внедрение предлагаемой системы управления ЛА с введением элементов, реализующих переменные по величине ограничения поканальных управляющих сигналов, приводит:
- к уменьшению выбросов в переходных процессах по каналам тангажа и курса;
- к повышению качества огибания рельефа местности, что дает возможность при необходимости уменьшить высоту полета ЛА, т.е. расширить функциональные возможности ЛА по условиям применения;
- к уменьшению динамического промаха при наведении ЛА на цель, т.е. к повышению эффективности применения ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ СИГНАЛОВ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2238582C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| СПОСОБ ОРБИТАЛЬНОГО ГИРОКОМПАСИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2583350C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| МОДЕРНИЗИРОВАННОЕ АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2554515C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ АВИАГОРИЗОНТА В ПИЛОТАЖНЫЙ КОМПЛЕКС | 2002 |
|
RU2213938C1 |
| БЕСПЛАТФОРМЕННЫЙ ОРБИТАЛЬНЫЙ ГИРОКОМПАС С ПРОИЗВОЛЬНОЙ КУРСОВОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2488774C1 |
Изобретение относится к области систем управления летательными аппаратами и может быть использовано в авиационной и ракетной технике. Система содержит формирователи каналов тангажа, курса и крена, входы которых соединены с входами системы по сигналам управления, сигналам свободных гироскопов и датчиков угловых скоростей, и блок кинематической разводки. Блок кинематической разводки включает инверторы, сумматоры и рулевые приводы. В каналы тангажа, курса и крена введены функциональные преобразователи, задатчики граничных параметров, а также компаратор. Изобретение позволяет повысить динамические свойства системы управления и расширить ее функциональные возможности в различных условиях полета. 6 ил.

Система управления летательным аппаратом, содержащая первый, второй и третий усилители - формирователи каналов тангажа, курса и крена, входы которых соединены с входами системы по сигналам управления, сигналам свободных гироскопов и датчиков угловых скоростей в соответствующих каналах, блок кинематической разводки, состоящий из первого и второго инверторов и первого, второго и третьего сумматоров, причем выходы первого и второго инверторов соединены с первыми входами второго и третьего сумматоров соответственно, первый, второй и третий рулевые приводы, входы которых соединены с выходами первого, второго и третьего сумматоров соответственно, отличающаяся тем, что в нее дополнительно введены первый, второй и третий функциональные преобразователи в каналах тангажа, курса и крена соответственно, первый, второй, третий и четвертый задатчики граничных параметров, а также компаратор, причем первый вход первого функционального преобразователя соединен с выходом первого усилителя-формирователя, а выход подключен ко вторым входам второго и третьего сумматоров, первый вход второго функционального преобразователя соединен с выходом второго усилителя-формирователя, а выход подключен к первому входу первого сумматора, третьему входу третьего сумматора и входу первого инвертора, первый вход третьего функционального преобразователя соединен с выходом третьего усилителя-формирователя, а выход подключен ко второму входу первого сумматора, третьему входу второго сумматора и входу второго инвертора, вторые входы первого, второго и третьего функциональных преобразователей соединены с выходом компаратора, первый вход которого подключен к выходу третьего усилителя-формирователя, а второй и третий входы - к выходам четвертого задатчика граничных параметров, причем третьи и четвертые входы первого, второго и третьего функциональных преобразователей соединены с выходами первого, второго и третьего задатчиков граничных параметров соответственно.
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕГКОГО САМОЛЕТА | 2000 |
|
RU2176812C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТАБИЛИЗАТОРОМ САМОЛЕТА | 1981 |
|
SU1029539A1 |
| US 3095169 А, 25.06.1963 | |||
| US 6145428 A, 14.11.2000. | |||

