Изобретение относится к оборудованию для расфасовки сыпучих продуктов в мешки из различных материалов, в частности к устройствам для захвата, раскрытия, удержания мешков в процессе их наполнения сыпучим материалом с возможностью последующего закрытия горловины мешка для прошивки, и может быть использовано в пищевой, перерабатывающей, химической промышленности, строительстве и сельском хозяйстве.
Известно устройство для надевания мешков на загрузочный патрубок [Авторское свидетельство СССР №1685792, кл. В65В 7/00, 1991 г.], содержащее вакуумный захват, закрепленный шарнирно на рычаге, расположенном на раме, неподвижно установленный на раме копир, закрепленную на рычаге с возможностью осевого перемещения подпружиненную тягу, один конец которой шарнирно соединен с вакуумным захватом, а другой с возможностью взаимодействия с копиром, при этом нижняя часть загрузочного патрубка выполнена со скосом в сторону вакуумного захвата и снабжена установленным над нижней кромкой скоса средством продольной подачи сжатого воздуха и укрепленной у верхней кромки скоса пластиной для перекрытия поперечного сечения загрузочного патрубка, соединенной с приводом ее перемещения.
Устройство позволяет захватывать мешок и надевать его на загрузочный патрубок расфасовочной машины. Однако недостатком устройства является отсутствие возможности закрывать верхнюю часть мешка после его наполнения, что делает невозможным полную автоматизацию процесса расфасовки. Кроме того, выполнение нижней части загрузочного патрубка со скосом может привести к разрыву верхней части мешка в процессе его надевания на загрузочный патрубок, так как противоположная от вакуумного захвата стенка мешка при взаимодействии с косой кромкой патрубка может не подняться до верхней кромки скоса. Указанные недостатки сужают технологические возможности и снижают надежность устройства.
Известен способ и устройство для автоматического подвешивания мешков (Патент РФ №2174486, кл. В65В 43/16, 1996 г.), которое состоит из устройства захвата и захватных цапф. Устройство захвата после приведения в положение готовности пустых мешков выполняет движение подвешивания к выбойному патрубку с помощью известных элементов управления. Выбойный патрубок снабжен зажимами мешков. Пустой мешок с помощью пары захватных цапф берется в лежачем положении из накопителя. Обе захватные цапфы снабжены пунктами горячего расплава в качестве мест адгезии. При захвате мешка его материал приклеивается к месту адгезии и посредством простой раздвижки захватных цапф мешок открывается настолько, что он соответствующим движением под выбойным патрубком подвешивается на него и посредством зажимов закрепляется. После закрепления мешка на выбойном патрубке пункты горячего расплава отрываются от захватных цапф благодаря их раскрытию и остаются на материале мешка. Затем мешок заполняется.
В данном устройстве в качестве захватывающих и удерживающих элементов используются цапфы с адгезией, то есть материал горловины мешка прилипает к ним и транспортируется к патрубку. Пункты горячего расплава, используемые в качестве адгезии, могут неблагоприятно воздействовать на легко воспламеняемый материал мешка. Кроме того, мешок захватывается лишь в двух точках. Это может привести к повреждению мешка, а также к неправильному его захвату и надеванию на выбойный патрубок. Закрепив мешок, захватные цапфы возвращаются в исходное положение, а мешок после наполнения отпускается и транспортируется с открытой горловиной. Все это снижает технологические возможности и надежность устройства в целом.
Наиболее близким техническим решением является устройство для раскрытия и надевания мешков на загрузочный патрубок (Патент РФ №2050308, кл. В65В 7/00, 1995 г), содержащее вакуумный захват, закрепленный неподвижно на рычаге, установленном с возможностью осевого перемещения на валу. Вал смонтирован на раме, на ней же закреплен неподвижно привод продольного перемещения рычага. На валу неподвижно установлен кронштейн и шарнирно соединенная с ним поворотная пластина. Один конец пластины связан посредством пружины с кронштейном и взаимодействует с укрепленным на рычаге упором, выполненным в виде ролика, а другой - взаимодействует с боковой кромкой мешка. Нижняя часть загрузочного патрубка выполнена из двух разъемных по вертикали частей. Дальняя от вакуумного захвата часть загрузочного патрубка выполнена с приводом горизонтального возвратно-поступательного перемещения. Ближняя к вакуумному захвату часть патрубка установлена неподвижно и выполнена с шарнирно соединенными с ней боковыми поворотными стенками, связанными через систему рычагов с приводом горизонтального возвратно-поступательного перемещения.
Данное устройство позволяет захватывать мешок, лежащий на подъемном столе, раскрывать его и надевать на загрузочный патрубок для наполнения сыпучим материалом. Однако после наполнения мешок опускается на ленту транспортера с непрошитой горловиной и в таком виде отправляется на последующую операцию прошивки, при этом может произойти потеря части сыпучего материала, находящегося в мешке. Причем закрытие мешков для прошивки осуществляется вручную, что делает невозможным полную автоматизацию процесса расфасовки. Это сужает технологические возможности устройства. Выполнение нижней части загрузочного патрубка в виде двух разъемных частей может привести к разрыву верхней кромки мешка при его надевании. Горловина мешка удерживается вакуумным захватом лишь с одной стороны, при этом другая не контролируется, то есть мешок может раскрыться самопроизвольно при транспортировке к загрузочному патрубку, а использование вакуумного захвата для раскрытия мешка может привести к неправильному или неполному раскрытию мешков из воздухопроницаемых материалов и ненадежному закреплению их на загрузочном патрубке. Все это снижает надежность устройства.
Технический результат изобретения заключается в расширении технологических возможностей устройства за счет захватного механизма, позволяющего раскрывать и удерживать мешок при наполнении, а после растягивать горловину мешка в линию для прошивки, что создает условия для комплексной автоматизации процесса расфасовки сыпучих материалов в мешки. При этом повышается надежность устройства, так как захват, раскрытие и удержание мешка при наполнении осуществляется пальцами захватного механизма с внутренней стороны мешка, а его основание находится на ленте транспортера.
Указанный технический результат достигается тем, что в устройстве для автоматического раскрытия, удержания и закрытия мешков, содержащем вакуумный захват, закрепленный на рычаге, смонтированном на валу, и загрузочный патрубок, установленные на раме, отличающемся тем, что устройство снабжено захватным механизмом для удержания мешков, состоящим из двух пневматических миницилиндров и рычажных звеньев, попарно соединенных шарнирами, заодно с которыми установлены захваты в виде пальцев, при этом захватный механизм смонтирован на пневмоцилиндре, шарнирно установленном на раме, на корпусе которого жестко закреплен стержень, шарнирно связанный со штоком поворотного пневмоцилиндра, причем при втянутом штоке пневмоцилиндра шарниры с пальцами захватного механизма расположены по периметру горловины раскрытого мешка, а при выдвинутом штоке пневмоцилиндра шарниры с пальцами расположены в ряд, а горловина мешка растянута в линию, на загрузочном патрубке жестко закреплена пластина, соединенная со штоком пневмоцилиндра одностороннего действия, в штоковой полости которого установлена пружина, на раме под загрузочным патрубком установлена лента транспортера, причем расстояние от ее поверхности до пальцев захватного механизма меньше длины заполненного мешка.
Отличиями заявляемого устройства является его конструктивное исполнение, при котором оно содержит захватный механизм, состоящий из рычажных звеньев и двух пневматических миницилиндров двухстороннего действия, при этом все звенья захватного механизма попарно соединены между собой шарнирами, заодно с которыми установлены захваты в виде пальцев. Захватный механизм смонтирован на пневмоцилиндре двухстороннего действия, выполненным с возможностью поворота вокруг оси, проходящей через середину пневмоцилиндра параллельно его основанию. Это позволяет ему поворачиваться на 90 градусов вместе с захватным механизмом и занимать вертикальное положение, при котором пальцы захватного механизма проникают внутрь горловины предварительно приоткрытого мешка и захватывают его посредством выдвигания штоков пневматических миницилиндров, при этом горловина мешка растянута в линию, либо горизонтальное, при котором захватный механизм располагается под загрузочным патрубком, удерживает мешок пальцами и раскрывает его посредством втягивания штока пневмоцилиндра, при этом шарниры с пальцами захватного механизма находятся в вершинах правильного выпуклого многоугольника по периметру горловины раскрытого мешка. Захват, раскрытие и удержание мешка осуществляется пальцами захватного механизма с внутренней стороны за счет давления воздуха в бесштоковых полостях пневматических миницилиндров и в штоковой полости пневмоцилиндра, что повышает надежность устройства. При этом основание мешка при его наполнении находится на ленте транспортера, установленной на раме под загрузочным патрубком, расстояние от поверхности которой до пальцев захватного механизма меньше длины заполненного мешка.
Кроме того, выполнение загрузочного патрубка с возможностью вертикального линейного перемещения посредством пневмоцилиндра одностороннего действия, шток которого соединен с пластиной, установленной на загрузочном патрубке, позволяет ему опускаться внутрь горловины открытого мешка, удерживаемого захватным механизмом во время наполнения, что позволяет обеспечить сохранность сыпучего продукта. После наполнения загрузочный патрубок возвращается в исходное положение, а горловина мешка закрывается и растягивается в линию пальцами захватного механизма с помощью втягивания штока пневмоцилиндра, подготавливая мешок к прошивке. Таким образом, использование данного устройства создает условия для комплексной автоматизации процесса расфасовки сыпучих материалов в мешки.
Сущность предлагаемого изобретения поясняется чертежами конструкции устройства для автоматического раскрытия, удержания и закрытия мешков.
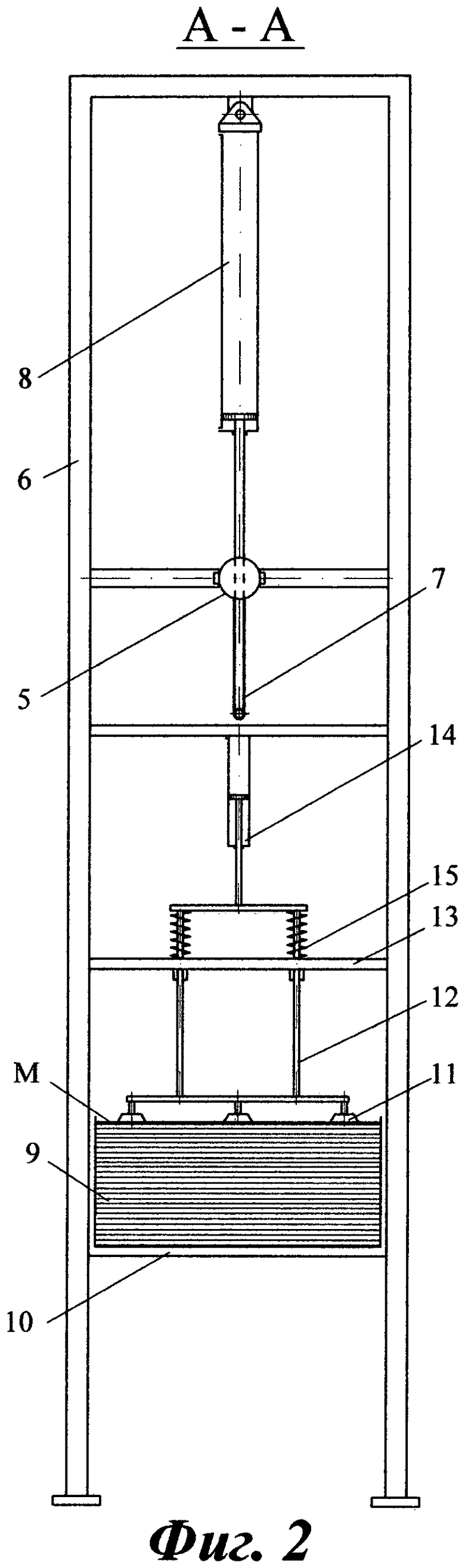
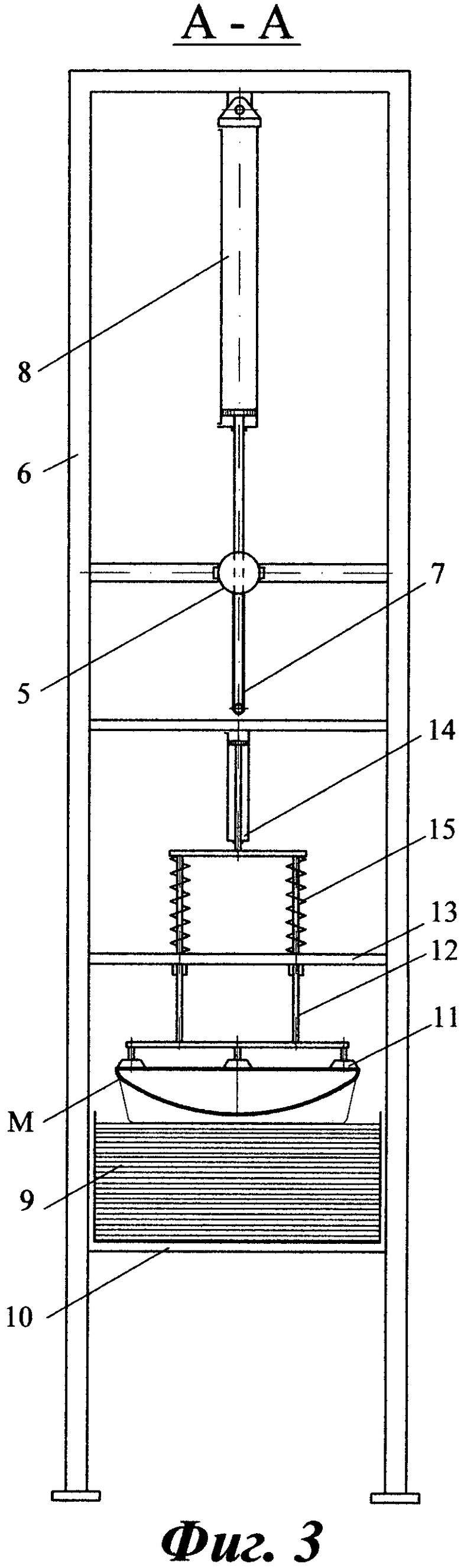
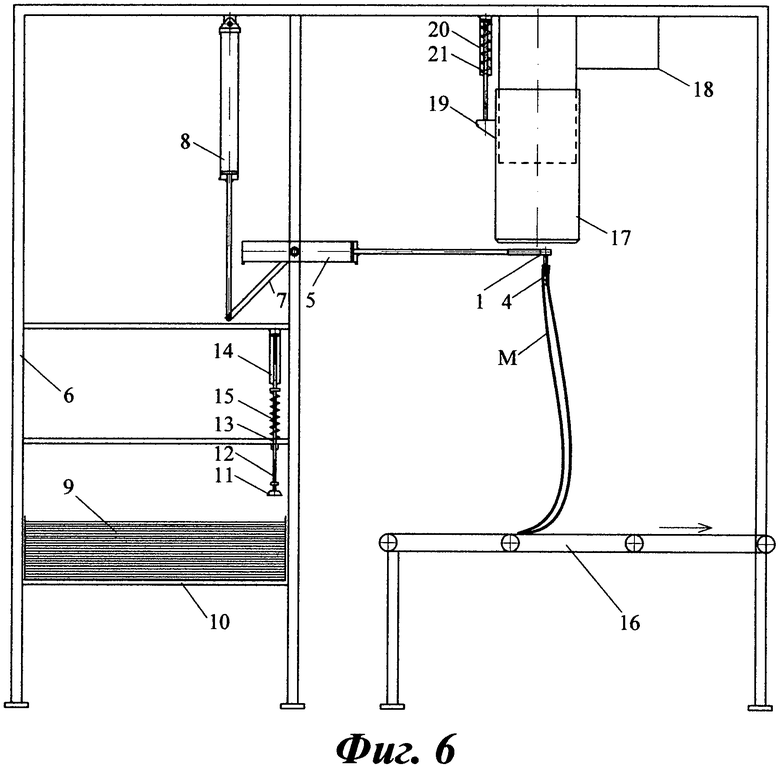
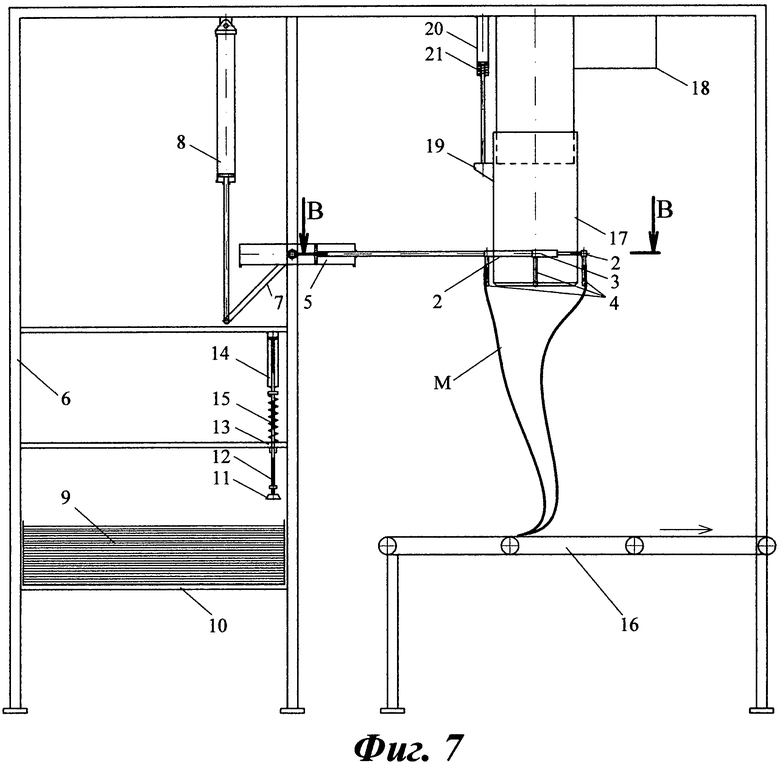
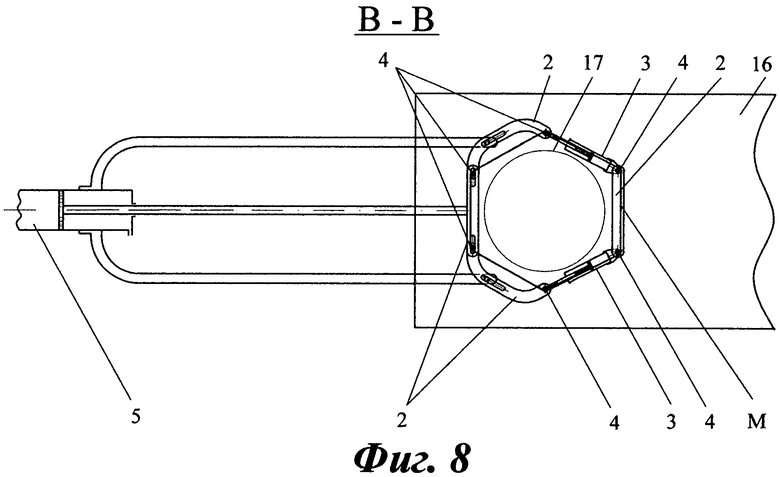
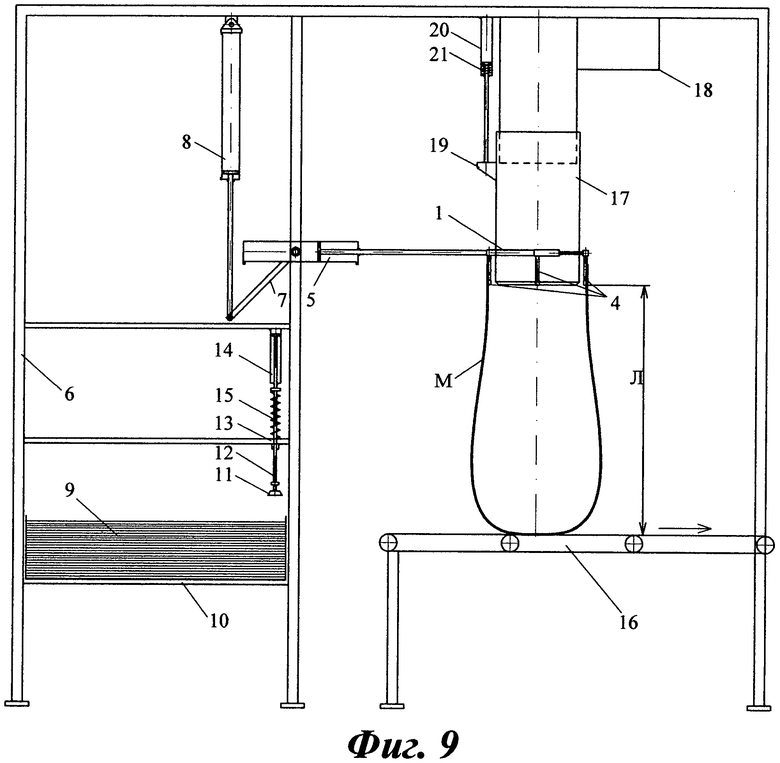
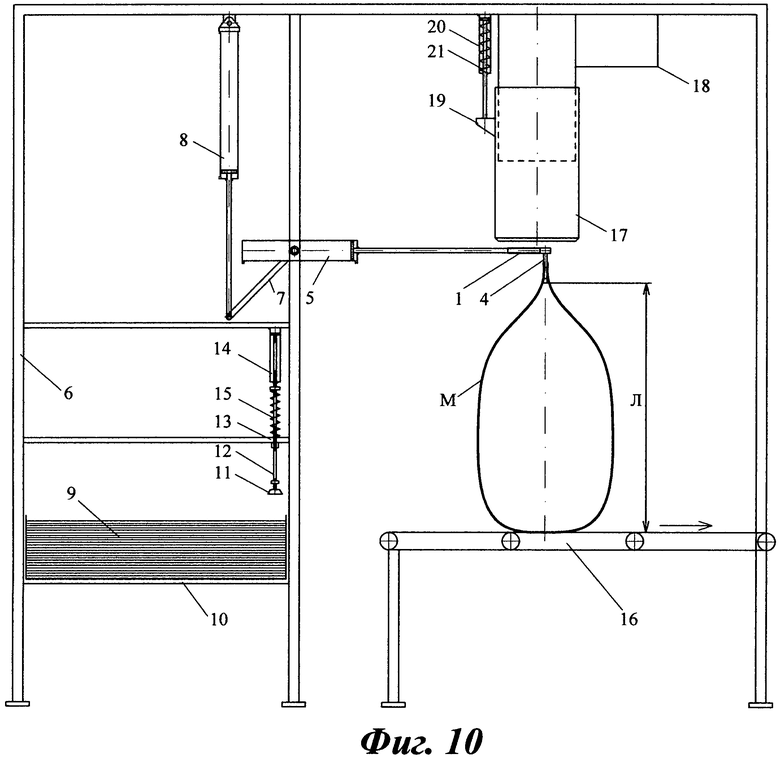
На фиг.1 представлено предлагаемое устройство, общий вид в исходном положении; на фиг.2 - разрез А-А на фиг.1, показано нижнее положение вакуумного захвата; на фиг.3 - разрез А-А на фиг.1, показано верхнее положение вакуумного захвата с приоткрытой горловиной мешка; на фиг.4 - общий вид устройства, захватный механизм в вертикальном положении, а его пальцы проникают внутрь приоткрытой горловины мешка; на фиг.5 - разрез Б-Б на фиг.4, боковые пальцы захватного механизма разведены и удерживают мешок; на фиг.6 - общий вид устройства, захватный механизм с мешком, удерживаемым пальцами, расположен под загрузочным патрубком; на фиг.7 - общий вид устройства, мешок раскрыт, загрузочный патрубок опущен внутрь горловины мешка; на фиг.8 - разрез В-В на фиг.7, показано расположение пальцев захватного механизма по периметру горловины раскрытого мешка; на фиг.9 - общий вид устройства, мешок наполнен, расположен на ленте транспортера и удерживается пальцами захватного механизма; на фиг.10 - общий вид устройства в конечном положении, мешок наполнен, его горловина закрыта и удерживается пальцами захватного механизма для прошивки.
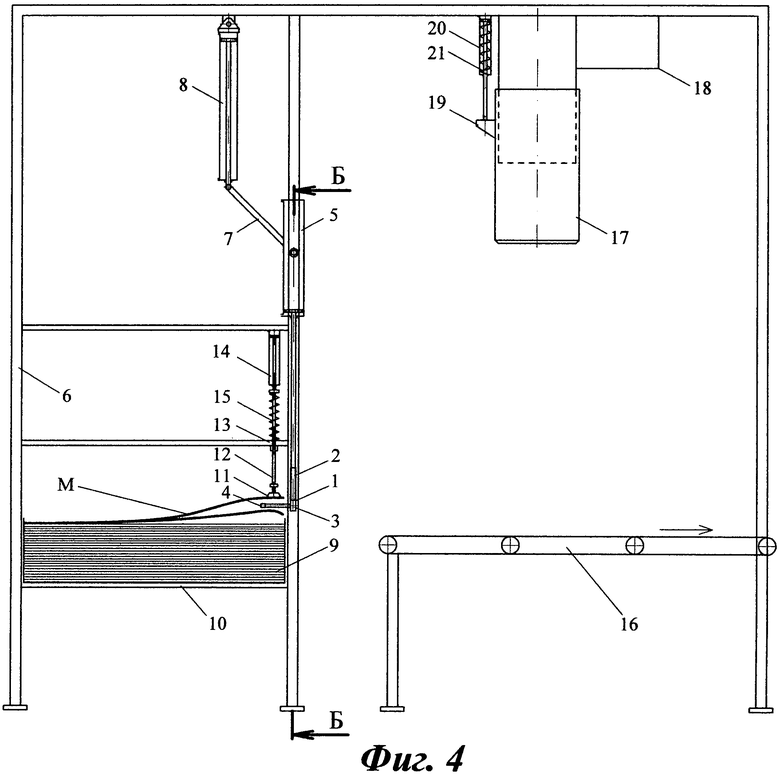
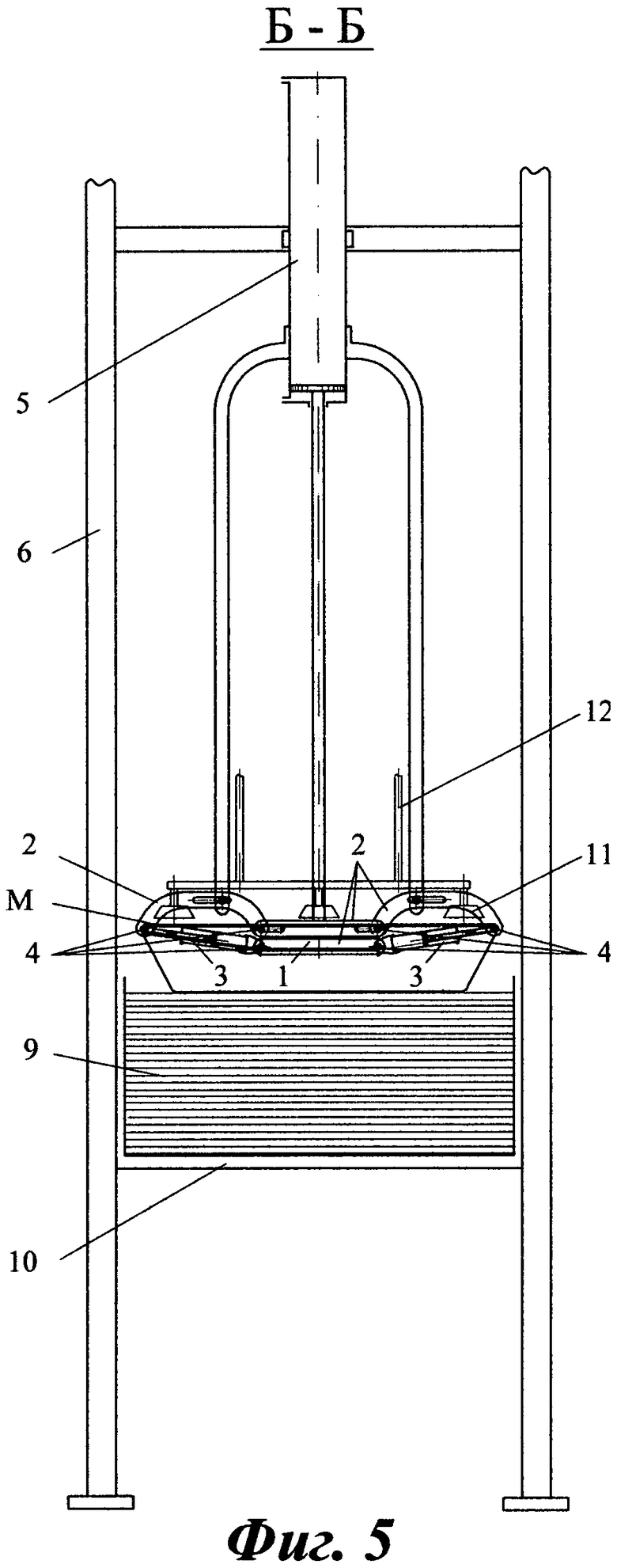
Устройство для автоматического раскрытия, удержания и закрытия мешков содержит захватный механизм 1 (фиг.1, 4, 5), состоящий из четырех рычажных звеньев 2 и двух пневматических миницилиндров 3 двухстороннего действия, попарно соединенных шарнирами, заодно с которыми установлены захваты в виде пальцев 4, причем крайние боковые из них выполнены с возможностью перемещения посредством втягивания и выдвигания штоков пневматических миницилиндров 3, а сам захватный механизм 1 смонтирован на пневмоцилиндре 5 и выполнен с возможностью расположения шарниров с пальцами 4 в ряд при выдвинутом штоке пневмоцилиндра 5, при этом горловина мешка М растянута в линию (фиг.5), а при втянутом штоке - в вершинах правильного выпуклого многоугольника по периметру горловины раскрытого мешка М (фиг.8).
Пневмоцилиндр 5 (фиг.4, 6) шарнирно установлен на раме 6 и выполнен с возможностью поворота вокруг оси, проходящей через центр пневмоцилиндра параллельно его основанию. Для этого на корпусе пневмоцилиндра 5 жестко закреплен стержень 7, шарнирно связанный со штоком поворотного пневмоцилиндра 8 двухстороннего действия, который также шарнирно установлен на раме 6. Стопа пустых, непрошитых с одной стороны мешков 9 находится на подъемном столе 10 внутри рамы 6. Вакуумный захват 11 соединен трубками с системой подачи воздуха (не показана), и установлен на рычаге 12 с возможностью вертикального осевого перемещения относительно вала 13, закрепленного на раме 6. Рычаг 12 имеет П-образную форму (фиг.2, 3), а его верхняя горизонтальная часть закреплена на штоке пневмоцилиндра привода продольного перемещения 14. Между верхней частью рычага 12 и валом 13 установлены пружины 15.
Лента транспортера 16 (фиг.7) смонтирована на раме 6 и расположена под загрузочным патрубком 17, причем расстояние Л (фиг.9, 10) от ее поверхности до пальцев 4 захватного механизма 1 меньше длины заполненного мешка М. Загрузочный патрубок 17, соединенный с дозатором 18 (показан условно), смонтированном на раме 6, выполнен с возможностью линейного вертикального перемещения, для этого на нем с внешней стороны установлена пластина 19, соединенная со штоком пневмоцилиндра одностороннего действия 20, в штоковой полости которого установлена пружина 21.
Устройство для автоматического раскрытия, удержания и закрытия мешков работает следующим образом.
Первоначально осуществляется настройка захватного механизма 1 на требуемую величину изменения его контура в зависимости от размера мешков 9, она выполняется ограничением величины хода штоков пневмоцилиндра 5 и пневматических миницилиндров 3. При этом для пневматических миницилиндров 3 настройка осуществляется таким образом, чтобы величина хода и скорость движения их штоков была одинаковой. Кроме того, осуществляется подбор рычажных звеньев захватного механизма 1 и шарниров с пальцами 4. Для задания конечных положений поворота пневмоцилиндра 5 с захватным механизмом 1 осуществляется настройка величины хода штока поворотного пневмоцилиндра 8. Для задания конечных положений загрузочного патрубка 17 осуществляется настройка величины хода штока пневмоцилиндра одностороннего действия 20 и подбор пружины 21. Для задания конечных положений (верхнего и нижнего) вакуумного захвата осуществляется настройка величины хода штока пневмоцилиндра привода продольного перемещения 14 рычага 12 и подбор пружин 15. Производится настройка дозатора 18 на дозирование требуемой порции сыпучего материала, а также настройка скорости и высоты подъема стола 10 в зависимости от цикла расфасовки. Подъемный стол 10 обеспечивает постоянный уровень положения верхнего мешка М, лежащего в стопе мешков 9. Синхронизируется работа ленты транспортера 16, вакуумного захвата 11 и захватного механизма 1, а также работа загрузочного патрубка 17, дозатора 18 и прошивочной машины (не показана). Полный цикл расфасовки задается и отрабатывается системой управления (не показана).
В исходном состоянии стопа мешков 9 уложена горизонтально (фиг.1) на подъемный стол 10 в положении, при котором все непрошитые горловины мешков ориентированы в сторону ленты транспортера 16 и загрузочного патрубка 17. Вакуумный захват 11 располагается над непрошитой горловиной мешков 9 и находится в верхнем положении, при котором шток пневмоцилиндра привода продольного перемещения 14 втянут, пружины 15 разжаты. Захватный механизм 1 и пневмоцилиндр 5 располагаются горизонтально (шток поворотного пневмоцилиндра 8 выдвинут), при этом плоскость захватного механизма 1 параллельна плоскости ленты транспортера 16, шток пневмоцилиндра 5 выдвинут, а штоки двух пневматических миницилиндров 3 втянуты, это позволяет расположить шарниры с пальцами 4 захватного механизма 1 в линию, причем крайние боковые шарниры с пальцами расположены максимально близко друг к другу. Загрузочный патрубок 17 поднят, при этом шток пневмоцилиндра одностороннего действия 20 втянут, пружина 21 разжата.
При начале очередного цикла вакуумный захват 11 посредством выдвигания штока пневмоцилиндра привода продольного перемещения 14 прижимается к поверхности горловины мешка М, лежащего сверху в стопе мешков 9 (фиг.2), после чего вакуумный захват 11 подключают к вакуумной системе (не показана). Перемещение вакуумного захвата 11 в исходное положение (втягивание штока пневмоцилиндра привода продольного перемещения 14) приводит к отделению верхнего мешка М от стопы (фиг.3), при этом нижняя часть его горловины провисает под действием собственного веса, открывая внутреннюю полость мешка. Пневмоцилиндр 5 с захватным механизмом 1 поворачивается по часовой стрелке посредством втягивания штока поворотного пневмоцилиндра 8, пальцы 4 проникают внутрь приоткрытой горловины мешка М (фиг.4). Выдвижение штоков пневматических миницилиндров 3 разводит крайние боковые шарниры с пальцами 4 захватного механизма 1. Одновременно с этим вакуумный захват 11 отключается от вакуумной системы, благодаря чему мешок М захватывается и удерживается на пальцах захватного механизма 1 (фиг.5). Удержание мешка М осуществляется за счет силы фрикционного взаимодействия поверхности пальцев 4 захватного механизма со стенками горловины мешка М, а также за счет демпфирующих свойств воздуха в бесштоковых полостях пневматических миницилиндров 3.
Затем захватный механизм 1 при выдвижении штока поворотного пневмоцилиндра 8 возвращается в свое исходное положение (фиг.6) и посредством втягивания штока пневмоцилиндра 5 раскрывает горловину мешка М, располагая шарниры с пальцами 4 по периметру горловины раскрытого мешка, что обеспечивает его удержание (фиг.7, 8). При этом основание мешка М находится на ленте транспортера 16 непосредственно под пальцами захватного механизма 1 и загрузочным патрубком 17, который с помощью выдвигания штока пневмоцилиндра одностороннего действия 20 (пружина 21 сжата) опускается внутрь горловины мешка М до уровня захватного механизма 1. Начинается засыпка предварительно взвешенной дозатором 18 порции продукта (фиг.9). По окончании засыпки пружина 21, разжимаясь, втягивает шток пневмоцилиндра одностороннего действия 20, при этом загрузочный патрубок 17 поднимается в верхнее исходное положение, захватный механизм 1 закрывает горловину мешка, втягивая шток пневмоцилиндра 5 (фиг.10) и подготавливая мешок для прошивки специальной прошивочной машиной, выполненной с возможностью перемещения в плоскости, перпендикулярной плоскости фиг.10 (не показана). После прошивки мешок М освобождается от пальцев 4 захватного механизма 1 с помощью втягивания штоков пневматических миницилиндров 3, и, располагаясь на ленте транспортера 16, перемещается на пункт отгрузки (складирования). На этом цикл наполнения мешка заканчивается. В это время подъемный стол 10 поднимается на одну позицию, а вакуумный захват 11 опускается к стопе мешков 9 для подготовки к захвату, раскрытию, удержанию при наполнении и закрытию для прошивки следующего мешка.
Использование предлагаемого устройства по сравнению с имеющимися обеспечивает существенное расширение технологических возможностей за счет того, что оно снабжено захватным механизмом для удержания горловины мешка. Захватный механизм смонтирован на пневмоцилиндре, что обеспечивает открытие и удержание мешка пальцами под загрузочным патрубком расфасовочной машины при наполнении. При этом основание мешка расположено на ленте транспортера, а загрузочный патрубок, выполненный с возможностью вертикального перемещения, в процессе расфасовки находится внутри мешка, что позволяет обеспечить сохранность продукта. Все это повышает надежность устройства. В то же время упрощается конструкция загрузочного патрубка, так как функции раскрытия и удержания мешка выполняет захватный механизм. Кроме того, использование в качестве основного рабочего органа захватного механизма, приводимого в движение пневмоцилиндрами, позволяет осуществлять ряд дополнительных технологических операций с мешком, например закрытие и растягивание его горловины в линию для прошивки. Таким образом, использование данного устройства создает условия для комплексной автоматизации процесса расфасовки сыпучих материалов в мешки.
Изобретение относится к оборудованию для расфасовки сыпучей продукции в мешки из различных материалов и может быть использовано в пищевой, химической, перерабатывающей промышленности, строительстве и сельском хозяйстве. Изобретение обеспечивает расширение технологических возможностей и повышение надежности. Устройство содержит захватный механизм 1, состоящий из рычажных звеньев 2 и пневматических миницилиндров 3, попарно соединенных шарнирами, снабженными пальцами 4. Захватный механизм 1 установлен на пневмоцилиндре 5, шарнирно смонтированном на раме 6 с возможностью поворота посредством стержня 7, связанного со штоком пневмоцилиндра 8. При этом при втянутом штоке пневмоцилиндра 8 шарниры с пальцами 4 расположены по периметру горловины раскрытого мешка, а при выдвинутом - расположены в ряд, а горловина мешка растянута в линию. На загрузочном патрубке 17 жестко закреплена пластина 19, соединенная со штоком пневмоцилиндра 20 одностороннего действия, в штоковой полости которого установлена пружина 21, на раме 6 под загрузочным патрубком 17 установлена лента транспортера 16, причем расстояние от ее поверхности до пальцев 4 захватного механизма 1 меньше длины заполненного мешка. 10 ил.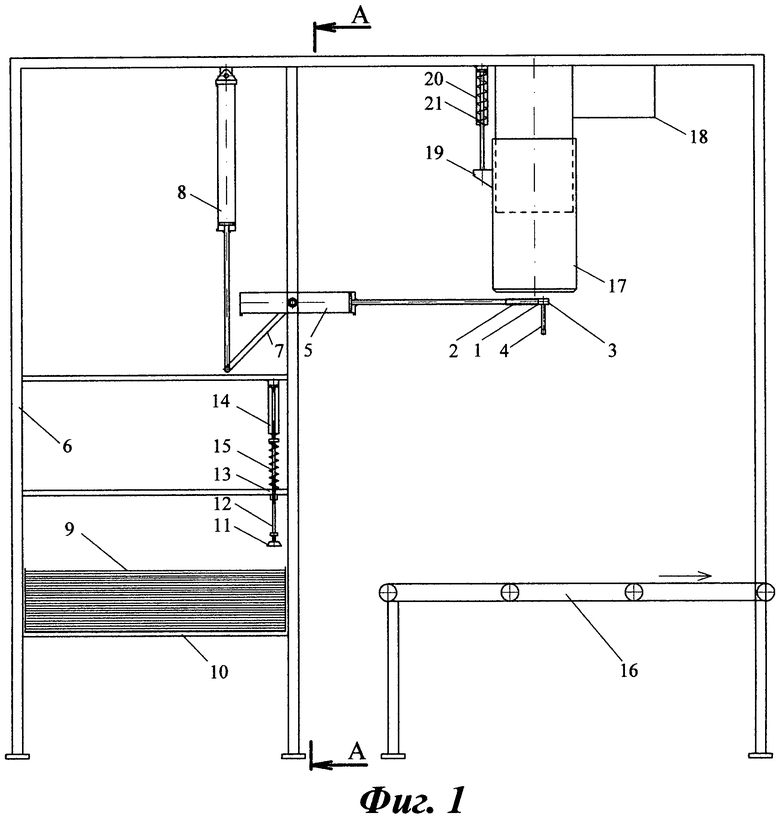
Устройство для автоматического раскрытия, удержания и закрытия мешков, содержащее вакуумный захват, закрепленный на рычаге, смонтированном на валу, и загрузочный патрубок, установленные на раме, отличающееся тем, что устройство снабжено захватным механизмом для удержания мешков, состоящим из двух пневматических миницилиндров и рычажных звеньев, попарно соединенных шарнирами, заодно с которыми установлены захваты в виде пальцев, при этом захватный механизм смонтирован на пневмоцилиндре, шарнирно установленном на раме, на корпусе которого жестко закреплен стержень, шарнирно связанный со штоком поворотного пневмоцилиндра, причем при втянутом штоке пневмоцилиндра шарниры с пальцами захватного механизма расположены по периметру горловины раскрытого мешка, а при выдвинутом штоке пневмоцилиндра шарниры с пальцами расположены в ряд, а горловина мешка растянута в линию, на загрузочном патрубке жестко закреплена пластина, соединенная со штоком пневмоцилиндра одностороннего действия, в штоковой полости которого установлена пружина, на раме под загрузочным патрубком установлена лента транспортера, причем расстояние от ее поверхности до пальцев захватного механизма меньше длины заполненного мешка.
| УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ И НАДЕВАНИЯ МЕШКОВ НА ЗАГРУЗОЧНЫЙ ПАТРУБОК | 1991 |
|
RU2050308C1 |
| Угловой диван-кровать | 1984 |
|
SU1279601A1 |
| Устройство для перевода раздвижных колесных пар с одной колеи на другую | 1973 |
|
SU576058A3 |
| Устройство для надевания мешков на загрузочный патрубок | 1990 |
|
SU1685792A1 |

