Изобретение относится к оборудованию для расфасовки сыпучих продуктов в мешки из различных материалов, в частности к устройствам для захвата, раскрытия и удержания мешков, например к расфасовочным машинам, и может быть использовано в легкой, пищевой, перерабатывающей, химической промышленности, строительстве и сельском хозяйстве.
Известно устройство для удержания мешков (Демский А.Б., Гончаров А.И. Фасовочно-упаковочное оборудование зерноперерабатывающих предприятий. - М.: Агропромиздат, 1987 г.- С.114-119, рис.39), содержащее привод перемещения в виде пневмоцилиндра, каждый шток которого соединен с одним из двух рычагов, установленных шарнирно на несущем элементе. При этом обеспечивается удержание мешка посредством его прижатия концами рычагов к наполнительному патрубку за счет усилия, создаваемого пневмоцилиндром.
Недостатком указанного устройства является ограниченность функциональных возможностей только удержанием мешка, предварительно раскрытого и надетого на наполнительный патрубок. Кроме того, удержание мешка осуществляется только концами двух рычагов, то есть в двух точках, что не обеспечивает достаточную надежность удержания мешка. Причиной ограниченности функциональных возможностей устройства является отсутствие в его составе захватных устройств, связанных с приводом, обеспечивающих захват и раскрытие мешка, а также его удержание в нескольких точках, расположенных по периметру горловины мешка.
Известен механизм для захвата и раскрытия мешков к расфасовочным машинам (Патент РФ №2028257, кл. В65В 67/12, 1995 г.), содержащий захваты в виде шарнирно установленных на несущем элементе рычагов с расположенными на них штырями и иглами для входа в раскрытую горловину мешка.
Устройство позволяет не только захватывать и раскрывать горловину мешка, но и удерживать его захватами. Однако работу данного устройства обеспечивает сравнительно сложная кинематическая схема, затрудняющая применение автоматизированного привода (например, пневматического) для перемещения захватов. Кроме того, захваты и их привод жестко связаны с наполнительным патрубком, что не позволяет их использовать как отдельное автономное устройство, например, для захвата мешка, то есть снижаются функциональные возможности устройства. Наличие в конструкции захватов игл, прокалывающих материал горловины мешка, ускоряет его износ, а использование одних штырей для раскрытия и удержания мешка из-за их точечного касания со стенками мешка не обеспечивает устройству требуемой надежности.
Наиболее близким техническим решением является устройство для захвата, раскрытия и удержания мешков (П.м. №88339 РФ, МПК В65В 67/12, 2009 г.), содержащее несущий элемент в виде рамы, рычаги, установленные на нем шарнирно, с захватами в виде штырей для входа в горловину мешка и привод их перемещения в виде пневмоцилиндра.
Данное устройство позволяет фиксировать горловину мешка, предварительно надетого на его захваты в виде штырей, раскрывать мешок и удерживать в открытом положении при наполнении. Однако недостатком устройства является ограниченность технологических возможностей, связанная с неспособностью самостоятельно захватывать мешки из стопы (загрузочного бункера). Крайние боковые штыри, расположенные соосно подпружиненным шарнирам, при ручном надевании мешка смещаются в сторону оси захватного устройства, при этом дополнительная тяга отходит от планки штока, это усложняет процесс надевания мешка и может привести к несоответствию формы раскрытой горловины мешка форме загрузочного патрубка. Кроме того, конструкция устройства такова, что при открывании шарнирного механизма пружины сжатия, установленные внутри некоторых рычагов, растягиваются, ослабляя при этом воздействие захватов в виде штырей на стенки горловины мешка, что может привести к ненадежному его удерживанию и соскальзыванию в процессе наполнения.
Технический результат изобретения заключается в расширении функциональных и эксплуатационных возможностей устройства посредством использования силовых пневмоцилиндров двустороннего действия, обеспечивающих автоматический захват горловины мешка, а также его раскрытие и удержание под загрузочным патрубком расфасовочной машины за счет применения при создании усилий для удержания мешков демпфирующих свойств воздуха в силовых пневмоцилиндрах.
Указанный технический результат достигается тем, что в известном устройстве для автоматического захвата, раскрытия и удержания мешков, содержащем несущий элемент в виде рамы, рычаги, установленные на нем шарнирно, с захватами в виде штырей для входа в горловину мешка и привод их перемещения, состоящий из пневмоцилиндра, на штоке которого закреплена планка, образующая с параллельной ей дополнительной тягой и рычагами плоский шарнирный механизм в виде многоугольника, закрепленный посредством шарниров рычагов на раме, с возможностью изменения его контура при перемещении штока пневмоцилиндра, соосно шарнирам установлены захваты в виде штырей, расположенных перпендикулярно плоскости шарнирного механизма, при этом на каждом штыре установлена сменная втулка из фрикционного материала, на цилиндрической поверхности которой выполнены рифли, причем шарнирный механизм при выдвинутом штоке пневмоцилиндра выполнен с возможностью расположения штырей в ряд, а при втянутом штоке - с возможностью расположения штырей по периметру горловины раскрытого мешка, в соответствии с предлагаемым изобретением устройство снабжено механизмом автоматического захвата горловины мешка в виде двух силовых пневмоцилиндров двустороннего действия, основания которых посредством накладок, осевых шарниров и дополнительной тяги соединены между собой, а концы штоков шарнирно связаны с двумя криволинейными рычагами, имеющими в местах их крепления к раме и к планке штока шарниры, выполненные с возможностью возвратно-поступательного перемещения их осей, при этом при втянутых штоках силовых пневмоцилиндров шарнирный механизм выполнен с возможностью расположения штырей в ряд, в котором расстояние между крайними боковыми штырями, соосными шарнирам между криволинейными рычагами и концами штоков силовых пневмоцилиндров, меньше размера горловины сложенного мешка, а при выдвинутых штоках соответствует этому размеру.
При этом по краям планки штока пневмоцилиндра, а также в средней части криволинейных рычагов выполнены сквозные пазы, в которых установлены шарниры с возможностью их возвратно-поступательного перемещения.
Причем каждый силовой пневмоцилиндр двустороннего действия снабжен регулятором скорости и регулятором величины хода штока.
Отличиями заявляемого устройства является его конструктивное исполнение, при котором оно содержит механизм автоматического захвата горловины мешка, состоящий из двух силовых пневмоцилиндров двустороннего действия, образующих с криволинейными рычагами, планкой и параллельной ей дополнительной тягой шарнирный механизм, смонтированный на раме. Причем планка жестко связана со штоком пневмоцилиндра привода, на котором установлена рама. Кроме того, по бокам планки и в средней части криволинейных рычагов выполнены сквозные пазы, в которых установлены шарниры с возможностью их возвратно-поступательного перемещения вдоль пазов. Благодаря этому при выдвинутом штоке пневмоцилиндра привода и втянутых штоках силовых пневмоцилиндров крайние боковые пальцы, соосные шарнирам между криволинейными рычагами и концами штоков силовых пневмоцилиндров, располагаются на расстоянии, которое меньше размера горловины сложенного мешка, а при выдвинутых штоках силовых пневмоцилиндров находятся на расстоянии, соответствующем размеру горловины сложенного мешка. Это позволяет автоматически захватывать мешок и удерживать его за счет демпфирующих свойств воздуха в бесштоковых полостях силовых пневмоцилиндров. В целом изменяется конструкция привода захватов, что позволяет автоматизировать захват мешка и, тем самым, дополнительно расширить функциональные и эксплуатационные возможности устройства. Крепление звеньев шарнирного механизма выполнено с возможностью его быстрой сборки или разборки, что обеспечивает легкую замену поврежденных или изношенных деталей, а также позволяет варьировать суммарную длину звеньев захватного устройства, изменяя расстояние между крайними боковыми штырями расположенных в линию захватов при изменении типоразмера наполняемых мешков. Выполнение пневмоцилиндров приводов перемещения захватов, при котором они снабжены регуляторами скорости движения штоков и регуляторами величины хода штоков, обеспечивает настройку устройства, что в целом необходимо для его надежного функционирования.
Сущность предлагаемого изобретения поясняется чертежами конструкции устройства для автоматического захвата, раскрытия и удержания мешков и регуляторов пневмоцилиндров приводов перемещения захватов.
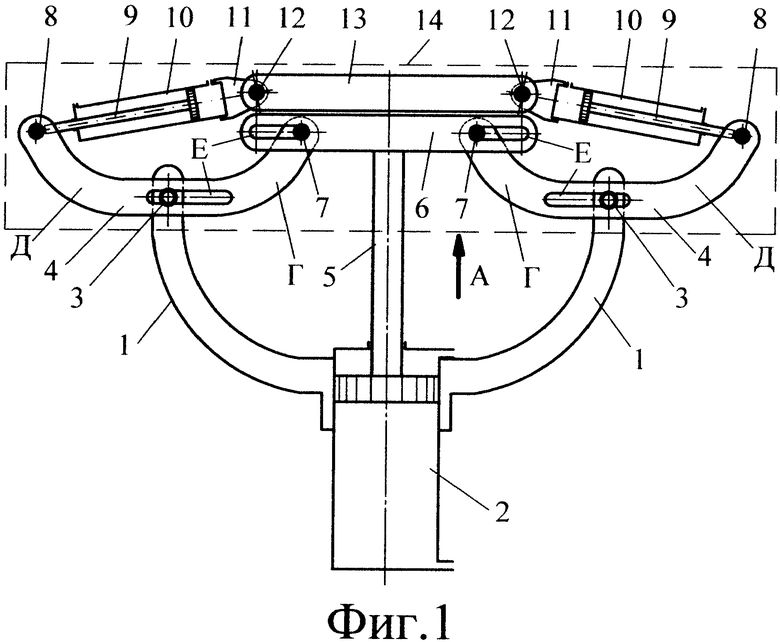
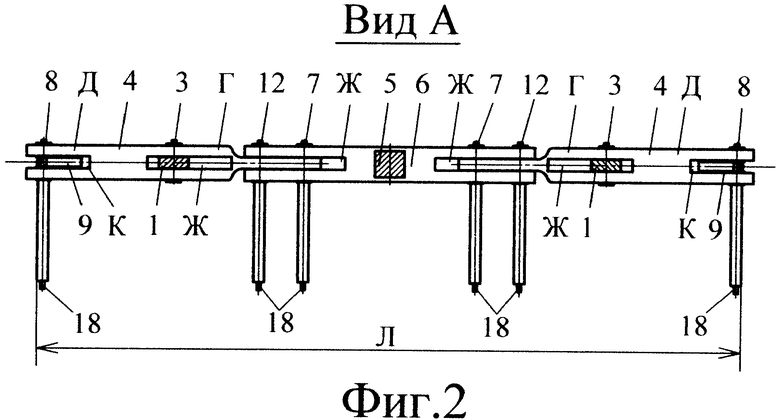
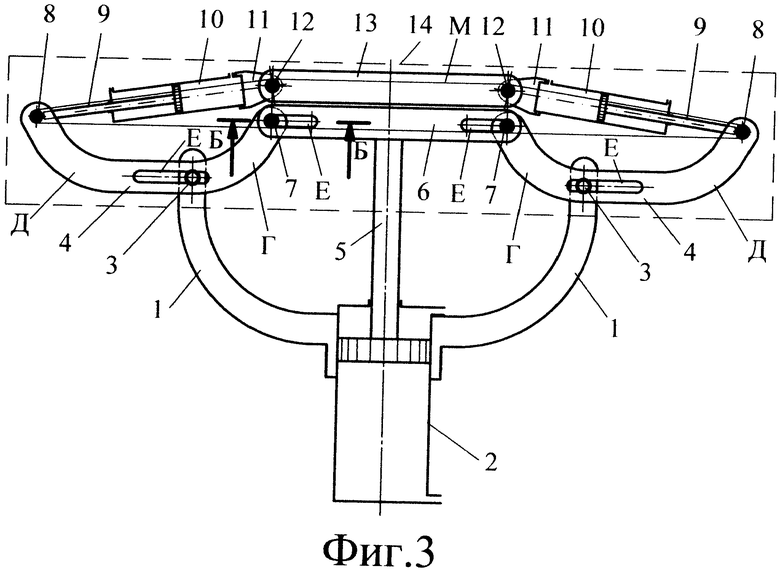
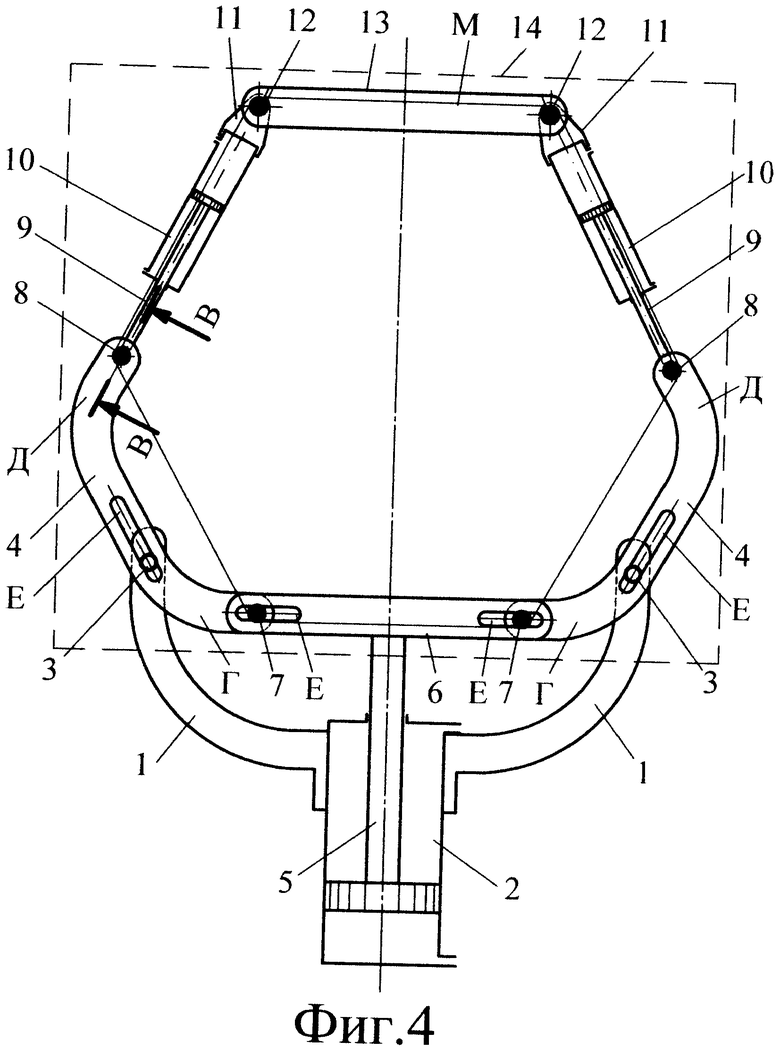
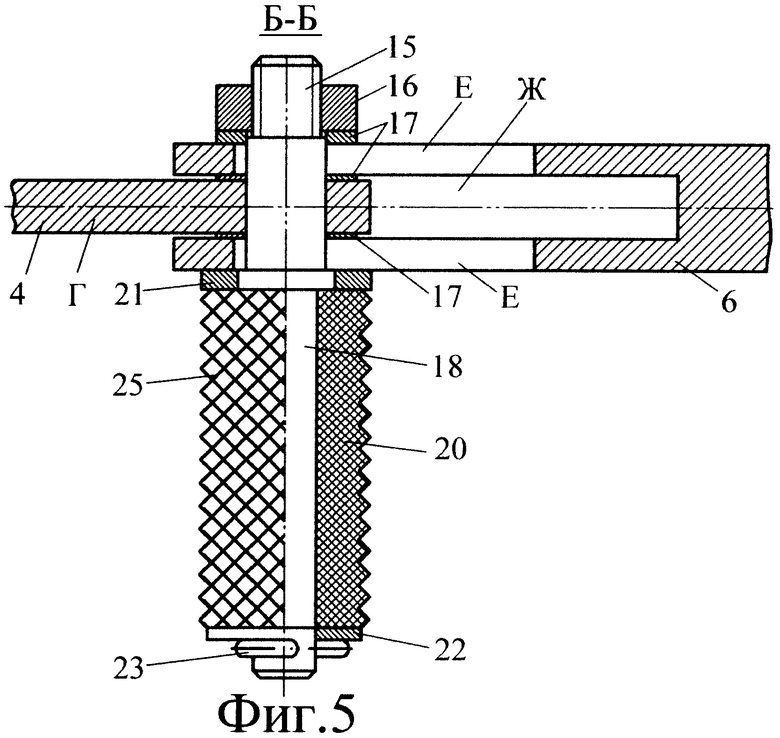
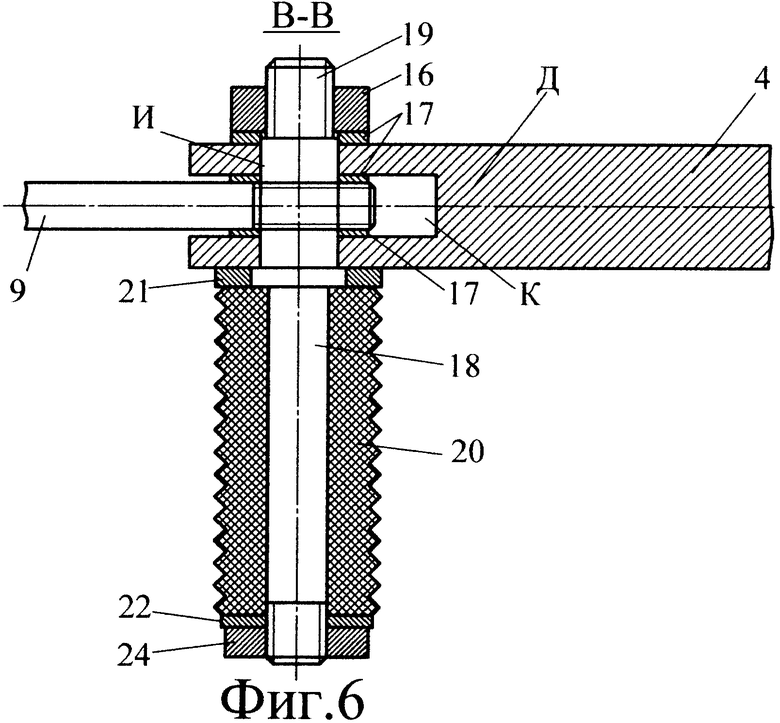
На фиг.1 изображена конструкция устройства, вид в плане при выдвинутом штоке пневмоцилиндра привода и втянутых штоках силовых пневмоцилиндров; на фиг.2 - вид А на фиг.1, показаны штыри, расположенные в ряд; на фиг.3 - конструкция устройства, вид в плане при выдвинутых штоках всех пневмоцилиндров; на фиг.4 - конструкция устройства, вид в плане при втянутом штоке пневмоцилиндра привода и выдвинутых штоках силовых пневмоцилиндров, захваты в виде штырей расположены в вершинах правильного выпуклого многоугольника; на фиг.5 - разрез Б-Б на фиг.3, показана конструкция подвижного шарнира и связанного с ним штыря со сменной втулкой (увеличено); на фиг.6 - разрез В-В на фиг.4, показано конструктивное соединение штока силового пневмоцилиндра и криволинейного рычага посредством осевого шарнира со штырем (увеличено); на фиг.7 - регулятор скорости движения штоков и регулятор величины хода штоков пневмоцилиндров.
Устройство для автоматического захвата, раскрытия и удержания мешков содержит несущий элемент в виде рамы 1 (фиг.1, 2, 3 и 4), которая смонтирована на пневмоцилиндре 2 двустороннего действия. На раме 1 посредством подвижных шарниров 3 установлены симметрично оси устройства два криволинейных рычага 4. На штоке 5 пневмоцилиндра 2 закреплена планка 6. Каждый из концов планки 6 через подвижные шарниры 7 соединен с соответствующими плечами Г криволинейных рычагов 4, при этом плечи Д криволинейных рычагов 4 связаны посредством осевых шарниров 8 со штоками 9 силовых пневмоцилиндров двустороннего действия 10, с основаниями которых с помощью накладок 11 и осевых шарниров 12 связана дополнительная тяга 13, параллельная планке 6. Все звенья расположены по замкнутому контуру и связаны между собой шарнирно, с возможностью углового перемещения относительно друг друга без заклинивания (так как шарниры 3 и 7 выполнены подвижными). Таким образом, указанные звенья образуют шарнирный механизм 14 (обведен пунктиром на фиг.1, 3, 4) автоматического захвата, раскрытия и удержания горловины мешка в виде многоугольника, закрепленный посредством подвижных шарниров 3 криволинейных рычагов 4 на раме 1 и связанный со штоком 5 пневмоцилиндра 2. Каждый подвижный шарнир 7 (фиг.5) содержит ось 15, которая размещена в пазах Е, выполненных в планке 6. Ось 15 закреплена в верхней части регулировочной гайкой 16 и шайбой 17, посредством которых обеспечивается возможность возвратно-поступательного перемещения оси 15 в пазах Е. При этом в планке 6 выполнено дополнительное сквозное отверстие Ж, внутри которого и расположены смонтированные на оси 15 конец Г криволинейного рычага 4 и две шайбы 17. Соосно оси 15 в виде ее продолжения выполнен штырь 18, исполняющий функцию захвата в виде пальца. Шарниры 3 конструктивно выполнены аналогично шарнирам 7, но не имеют продолжения в виде штыря 18. При этом место конца Г криволинейного рычага 4 занимает конец рамы 1. Тем самым обеспечивается ограниченное поступательное и вращательное движение криволинейных рычагов 4 в средней их части относительно конца рамы 1. Шарниры 12 конструктивно выполнены аналогично шарнирам 7 совместно со штырем 18, но с осью 15, не имеющей возможности возвратно-поступательного перемещения в пазах Е. При этом пазы Е имеют цилиндрическую форму, а паз Ж укорочен. Место конца Г криволинейного рычага 4 занимает накладка 11, закрепленная на основании силового пневмоцилиндра 10. Каждый шарнир 8 (фиг.6) содержит ось 19, которая размещена в цилиндрическом сквозном отверстии И, выполненном в соответствующем плече Д криволинейного рычага 4. Ось 19 закреплена в верхней части регулировочной гайкой 16 и шайбой 17, посредством которых обеспечивается возможность вращательного движения оси 19 в пазе И. При этом внутри плеча Д криволинейного рычага 4 выполнено дополнительное сквозное отверстие К. Здесь же, на оси 19 в средней ее части с помощью резьбового соединения установлен шток 9 силового пневмоцилиндра 10, а также две шайбы 17. Соосно оси 19 в виде ее продолжения выполнен штырь 18, исполняющий функцию захвата в виде пальца. Таким образом, все штыри 18 расположены соосно соответствующим осям шарниров 7, 8, 12 и перпендикулярно плоскости шарнирного механизма 14. При этом на каждом штыре 18 установлена сменная втулка 20 в виде цилиндра из фрикционного материала (например, резины), которая закреплена посредством шайб 21, 22, шплинта 23 (фиг.5) или гайки 24 (фиг.6). На цилиндрической поверхности втулки 20 выполнено рифление 25, что обеспечивает повышение ее фрикционного взаимодействия (сцепляемости) со стенками горловины удерживаемого мешка М (показан условно тонкой линией на фиг.3 и 4). Такое конструктивное выполнение шарнирного механизма 14 обеспечивает при выдвинутом штоке 5 пневмоцилиндра 2 возможность расположения связанных с ним штырей 18 в ряд, в котором расстояние Л между крайними штырями 18 меньше размера горловины сложенного мешка М (фиг.2), если штоки 9 силовых пневмоцилиндров 10 втянуты, и соответствует этому размеру при выдвинутых штоках 9 (фиг.3). При втянутом штоке 5 пневмоцилиндра 2 шарнирный механизм 14 обеспечивает возможность расположения штырей 18 по периметру горловины раскрытого мешка М в вершинах правильного выпуклого многоугольника (фиг.4).
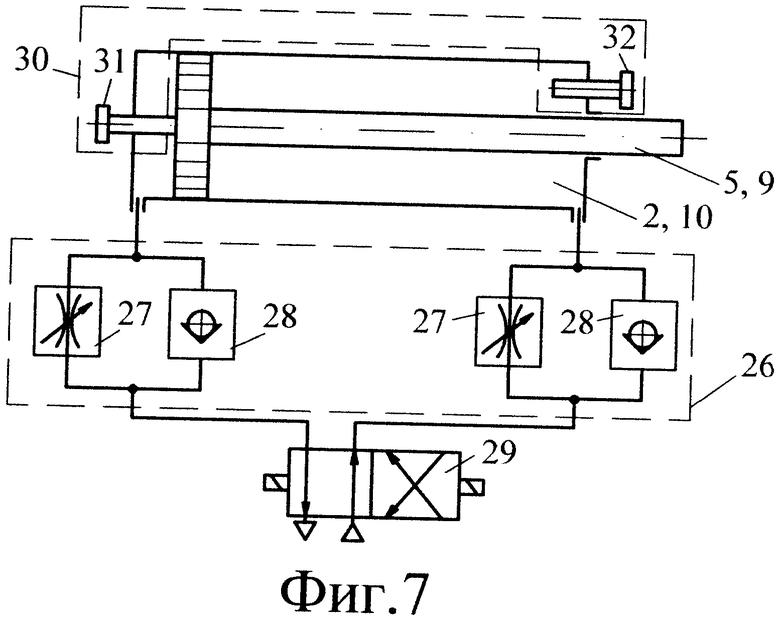
Пневмоцилиндры 2 и 10 снабжены регулятором 26 (обведен пунктиром на фиг.7) скорости движения их штоков 5 и 9 в обоих направлениях (может быть использован соответствующий регулятор, приведенный в Отраслевых руководящих материалах «Выбор, расчет и эксплуатация пневматических приводов и систем управления станков, прессов и других машин» / А.И.Кудрявцев [и др.] - М.: НИИМАШ, 1969. - С.85, рис.85). Регулятор 26 состоит из регулируемого пневмодросселя 27 и обратного клапана 28, установленных на линиях, соединяющих полости пневмоцилиндров 2 и 10 с пневмораспределителем 29. Кроме того, пневмоцилиндры 2 и 10 снабжены регулятором 30 (обведен пунктиром на фиг.7) величины ходов штоков 5 и 9, который состоит из двух регулируемых упоров 31 и 32, установленных соответственно в бесштоковых и штоковых полостях пневмоцилиндров 2 и 10 с возможностью фиксированного осевого перемещения.
Устройство для автоматического захвата, раскрытия и удержания мешков работает следующим образом. Первоначально осуществляется настройка на требуемую величину изменения контура шарнирного механизма 14, наиболее приемлемую для работы устройства. Она выполняется регуляторами 30 величины хода штоков 5 и 9 пневмоцилиндров 2 и 10, которые устанавливаются посредством осевого перемещения упоров 31 и 32. Регулируемыми упорами 32 устанавливается величина выдвижения, а регулируемыми упорами 31 - величина втягивания (обратного хода) штоков 5 и 9. При этом для силовых пневмоцилиндров 10 регулировка величины хода штоков 9 осуществляется одинаково. Настройка скорости срабатывания шарнирного механизма 14, а следовательно, плавности перемещения штырей 18, выполняется регуляторами 26 скорости движения штоков 5 и 9, которая задается регулированием дросселей 27, установленных в соответствующей выхлопной линии, и пневмоклапанов 28 в соответствующей подводящей линии пневмораспределителей 29 (фиг.7) для каждого пневмоцилиндра отдельно. При этом для силовых пневмоцилиндров 10 настройка осуществляется таким образом, чтобы скорость движения штоков 9 была одинаковой. Кроме того, выполняется настройка шарниров 3 и 7 на возвратно-поступательное перемещение соответствующих осей 15 в пазах Е и Ж. Она осуществляется посредством подбора шайб 17 и регулировки затяжки соответствующих гаек 16 (фиг.5). Установка или замена сменных втулок 20 на штырях 18 осуществляется при снятых шплинте 23 (фиг.5) или гайке 24 (фиг.6) и шайбах 22 с последующей их установкой.
Режимы работы устройства устанавливаются путем соответствующего переключения пневмораспределителей 29, посредством которых осуществляется управление пневмоцилиндрами 2 и 10. Для работы устройства в режиме захвата мешка М шток 5 пневмоцилиндра 2 перемещается в выдвинутое положение, а штоки 9 силовых пневмоцилиндров 10 втягиваются, вследствие чего все звенья шарнирного механизма 14: планка 6, криволинейные рычаги 4, два силовых пневмоцилиндра 10 и дополнительная тяга 13, оказываются сложенными (фиг.1). При этом шарнирный механизм 14 обеспечивает расположение штырей 18 в ряд, в котором расстояние между крайними боковыми штырями 18 со сменными втулками 20, соосными осевым шарнирам 8, меньше размера горловины сложенного мешка М. В таком положении устройство может проникать внутрь горловины мешка М, приоткрытого с помощью струйных пневматических устройств (могут быть использованы известные устройства, например струйные присосы, приведенные в книге «Пневматическое оборудование и пневмотранспорт в швейной промышленности» / В.И.Дрожжин. - М.: Легкая индустрия, 1975. - С.89, 92, рис.20г), при условии, что плоскость шарнирного механизма 14 параллельна плоскости горловины приоткрытого мешка. Затем, под действием воздуха, попадающего в бесштоковые полости силовых пневмоцилиндров 10 (переключение пневмораспределителя 29), выдвигаются штоки 9, при этом шарнирный механизм 14 обеспечивает расположение штырей 18 в ряд, а расстояние между крайними боковыми штырями 18, соосными осевым шарнирам 8, соответствует размеру горловины сложенного мешка М (фиг.3). В таком положении устройство выполняет функцию автоматического захвата мешка М, а также операции по его переносу (подаче) к загрузочному патрубку расфасовочной машины или по сопровождению наполненного мешка М на позицию прошивки в закрытом виде. Эти операции позволяют выполнять автономность устройства, которая обеспечивается закреплением шарнирного механизма 14 на раме 1 посредством подвижных шарниров 3, а рамы 1 - на пневмоцилиндре 2. Для работы устройства в режиме раскрытия мешка М шток 5 пневмоцилиндра 2 переводится во втянутое положение, что вызывает перемещение планки 6, вследствие которого и посредством подвижных шарниров 7 произойдет поворот криволинейных рычагов 4 в подвижных шарнирах 3. Причем поворот плечей Д криволинейных рычагов 4 через осевые шарниры 8, 12 и силовые пневмоцилиндры 10 переместит дополнительную тягу 13, после чего шарнирный механизм 14 примет вид правильного выпуклого многоугольника, а штыри 18 займут места в вершинах этого многоугольника (фиг.4). При этом штыри 18 расположатся по периметру горловины мешка М, в которую они введены, обеспечивая тем самым его раскрытие.
Удержание мешка М осуществляется за счет силы фрикционного взаимодействия рифления 25, выполненного на поверхности втулок 20, установленных на штырях 18 шарнирного механизма 14, со стенками горловины мешка М, а также за счет демпфирующих свойств воздуха в бесштоковых полостях силовых пневмоцилиндров 10.
Использование предлагаемого устройства по сравнению с имеющимися обеспечивает существенное расширение функциональных и эксплуатационных возможностей за счет того, что оно снабжено механизмом автоматического захвата горловины приоткрытого с помощью известных способов мешка, состоящим из двух силовых пневмоцилиндров двустороннего действия, обеспечивающих раздвигание крайних боковых захватов в виде штырей, выполняющих роль пальцев, и удержание мешка под загрузочным патрубком расфасовочной машины за счет использования при создании усилий для удержания мешков демпфирующих свойств воздуха в силовых пневмоцилиндрах. Кроме того, выполнение устройства в виде шарнирного механизма, приводимого в движение пневмоцилиндрами, позволяет осуществлять ряд вспомогательных операций с мешком, необходимых для его затаривания в автоматическом режиме. Применение в устройстве регуляторов скорости движения штоков пневмоцилиндров и регуляторов величины их хода значительно повышает удобство и качество настройки шарнирного механизма, а следовательно, и удобство эксплуатации устройства в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РАСКРЫТИЯ, УДЕРЖАНИЯ И ЗАКРЫТИЯ МЕШКОВ | 2011 |
|
RU2469928C1 |
| Устройство для запечатывания мешков из полимерных материалов | 1989 |
|
SU1708699A1 |
| Устройство для упаковки изделий в мешки из термосклеивающегося материала | 1978 |
|
SU765120A1 |
| Устройство для гофрирования горловины мешка | 1988 |
|
SU1565758A1 |
| Устройство для гибки зигзагообразных нагревателей | 1987 |
|
SU1540897A1 |
| Устройство для запечатывания мешков | 1979 |
|
SU786874A3 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СЪЕМНЫМ КУЗОВОМ | 2000 |
|
RU2188769C2 |
| УСТАНОВКА ДЛЯ РАЗДЕЛЕНИЯ ТУШ ЖИВОТНЫХ НА ПОЛУТУШИ | 1992 |
|
RU2048108C1 |
| Захват для грузов в мягкой таре | 1981 |
|
SU1009970A1 |
| Устройство для сбора половы в мягкие контейнеры | 2022 |
|
RU2788129C1 |
Изобретение может быть использовано в перерабатывающей, пищевой, химической промышленности, строительстве и сельском хозяйстве. Технический результат заключается в расширении функциональных и эксплуатационных возможностей устройства для автоматического захвата, раскрытия и удержания мешков. Устройство содержит раму, смонтированную на пневмоцилиндре. На раме шарнирно установлены два криволинейных рычага. Каждый из концов планки, связанной со штоком пневмоцилиндра, через подвижные шарниры соединен с соответствующими плечами рычагов. Плечи рычагов связаны посредством осевых шарниров со штоками силовых пневмоцилиндров двустороннего действия. С основаниями пневмоцилиндров связана дополнительная тяга, параллельная планке. Указанные звенья образуют шарнирный механизм. Штыри, выполняющие функции захватов, расположены соосно осям соответствующих шарниров и перпендикулярно плоскости шарнирного механизма. Шарнирный механизм при выдвинутом штоке пневмоцилиндра обеспечивает расположение штырей в ряд. При втянутых штоках силовых пневмоцилиндров расстояние между крайними боковыми штырями меньше размера горловины сложенного мешка, а при выдвинутых штоках соответствует этому размеру. При втянутом штоке пневмоцилиндра шарнирный механизм обеспечивает расположение штырей по периметру горловины раскрытого мешка. 2 з.п. ф-лы, 7 ил.
1. Устройство для автоматического захвата, раскрытия и удержания мешков, содержащее несущий элемент в виде рамы, рычаги, установленные на нем шарнирно, с захватами в виде штырей для входа в горловину мешка и привод их перемещения, состоящий из пневмоцилиндра, на штоке которого закреплена планка, образующая с параллельной ей дополнительной тягой и рычагами плоский шарнирный механизм в виде многоугольника, закрепленный посредством шарниров рычагов на раме с возможностью изменения его контура при перемещении штока пневмоцилиндра, соосно шарнирам установлены захваты в виде штырей, расположенных перпендикулярно плоскости шарнирного механизма, при этом на каждом штыре установлена сменная втулка из фрикционного материала, на цилиндрической поверхности которой выполнены рифли, причем шарнирный механизм при выдвинутом штоке пневмоцилиндра выполнен с возможностью расположения штырей в ряд, а при втянутом штоке - с возможностью расположения штырей по периметру горловины раскрытого мешка, отличающееся тем, что устройство снабжено механизмом автоматического захвата горловины мешка в виде двух силовых пневмоцилиндров двустороннего действия, основания которых посредством накладок, осевых шарниров и дополнительной тяги соединены между собой, а концы штоков шарнирно связаны с двумя криволинейными рычагами, имеющими в местах их крепления к раме и к планке штока шарниры, выполненные с возможностью возвратно-поступательного перемещения их осей, при этом при втянутых штоках силовых пневмоцилиндров шарнирный механизм выполнен с возможностью расположения штырей в ряд, в котором расстояние между крайними боковыми штырями, соосными шарнирам между криволинейными рычагами и концами штоков силовых пневмоцилиндров, меньше размера горловины сложенного мешка, а при выдвинутых штоках - соответствует этому размеру.
2. Устройство по п.1, отличающееся тем, что по краям планки штока пневмоцилиндра, а также в средней части криволинейных рычагов выполнены сквозные пазы, в которых установлены шарниры с возможностью их возвратно-поступательного перемещения.
3. Устройство по п.1, отличающееся тем, что каждый силовой пневмоцилиндр двустороннего действия снабжен регулятором скорости и регулятором величины хода штока.
| 0 |
|
SU88339A1 | |
| Вентильный электропривод | 2018 |
|
RU2706416C1 |
| GB 1169392 A, 05.11.1969 | |||
| SE 513557 C2, 02.10.2000. | |||

