Уровень техники
Настоящее изобретение относится, в целом, к колесным транспортным средствам и, более конкретно, к имеющему уникальную конструкцию трехколесному самокату с задними управляемыми колесами, имеющему одно переднее колесо и пару меньших по диаметру задних колес, при этом самокат выполнен с возможностью управления пользователем за счет углового рыскания задних колес в ответ на боковое качание или наклон шасси, на котором шарнирно установлены задние колеса.
Самокаты хорошо известны в предшествующем уровне техники и имеют широкий конструктивный ряд, при этом каждая конструкция обладает определенными преимуществами, которые позволяют наезднику или пользователю выполнять определенные маневры, которые не могут быть выполнены самокатами иных конструкций. Например, в патенте США №6250656 раскрыт самокат, имеющий удлиненную подножку, поддерживаемую сзади парой колес малого диаметра и спереди передним колесом большого диаметра. Самокат имеет хорошую управляемость через переднее поворотное колесо, которое управляется пользователем через узел руля. Подножка включает в себя направленную вверх под углом плоскую часть, расположенную за задними колесами и ориентированную под углом, чтобы позволить выполнить кабрирование самоката в ответ на действия пользователя, который встает на плоскую часть так, чтобы иметь возможность выполнить "езду на заднем колесе" и позволить самокату прыгать над объектами.
В патенте США №5620189 раскрыт самокат, имеющий узел рамы, который включает в себя подножку в задней части узла рамы и переднее колесо большого диаметра, расположенное в передней части самоката. Задняя часть подножки поддерживается, по меньшей мере, одним неуправляемым задним колесом, предпочтительно располагающимся ниже подножки. Кроме того, самокат может иметь несколько задних колес, которые могут иметь рядное расположение, что позволяет нескольким поверхностям качения облегчать плавное перемещение по пересеченной местности, например по ступенькам лестницы или уличным обочинам. Управление самоката облегчено посредством узла руля, с помощью которого наездник может управлять передним колесом и, таким образом, обеспечивать уверенное управление самокатом обычным способом.
В патенте США №6739606 раскрыт самокат с двойной подножкой в трехколесном исполнении, с передним колесом сравнительно большого диаметра, подсоединенным к раме. В заднем направлении рама вилкообразно разветвляется и образует два ответвления, каждое из которых поддерживается одним задним колесом. Каждое ответвление включает в себя подножку, обычно имеющую горизонтально - ориентированное положение, задний торец которой поддерживается задним колесом. При отталкивании от земли для продвижения самоката вперед пользователь может одной ногой находиться на одной из подножек. Управление самоката осуществляется посредством переднего колеса, которое поворачивается с помощью узла руля.
В патенте США №6220612 раскрыт трехколесный самокат, имеющий конструкцию "движимого за счет раскачки транспортного средства" с одним управляемым передним колесом и парой задних колес, расположенных на отдельных продольных рычагах. Каждый из продольных рычагов шарнирно соединен с передней колонкой, к которой крепится переднее колесо. Самокат движется вперед за счет усилий пользователя, который попеременно перекладывает свой вес из стороны в сторону, при этом самокат проделывает синусоидальный путь с помощью пользователя, направляющего переднее колесо влево и вправо посредством узла руля. Одновременное перекладывание веса из стороны в сторону в сочетании с управлением самокатом обеспечивает, согласно закону сохранения углового момента, серию ускорений, что приводит к движению самоката вперед.
Предшествующий уровень техники включает в себя дополнительные альтернативные конструкции самоката в дополнение к вышеописанным конструкциям. Большинство самокатов предшествующего уровня техники способствуют направленному управлению самокатом с помощью переднего поворотного колеса, которое соединено с узлом руля, посредством которого пользователь может управлять самокатом. Кроме того, многие конструкции самокатов предшествующего уровня техники скомпонованы таким образом, что переднее и задние колеса располагаются на сравнительно большом расстоянии друг от друга, так что самокат оказывается неспособным к выполнению поворотов малого радиуса. Кроме того, многие конструкции самокатов предшествующего уровня техники включают стандартные велосипедные рули, в состав которых входит пара расходящихся в стороны ручек, за которые наезднику нужно держаться обеими руками для обеспечения эффективного управления самокатом обычным способом.
Очевидно, что существует потребность в разработке самоката, обеспечивающего пользователю или наезднику возможность выполнять повороты различных радиусов, включая повороты относительно малого радиуса, с тем, чтобы увеличить диапазон выполняемых маневров. Кроме того, существует потребность в разработке самоката, который мог бы управляться наездником в положении равновесия, но которому при этом не нужно было бы балансировать рулем, удерживая его руками.
Кроме того, существует потребность в разработке самоката, который бы обеспечивал возможности для стабилизации или балансировки наездника с тем, чтобы позволить взрослым, а также детям управлять самокатом без риска получить травму в результате падения с самоката. Наконец, существует потребность в разработке самоката, который имел бы простую конструкцию, низкую стоимость, небольшой размер и относительно небольшой вес с тем, чтобы повысить маневренность самоката и упростить его транспортировку и хранение.
Краткое описание изобретения
Целью настоящего изобретения является удовлетворение вышеуказанных потребностей путем разработки трехколесного самоката с задними управляемыми колесами, способного выполнять повороты различных радиусов, включая повороты относительно малого радиуса. Трехколесный самокат с задними управляемыми колесами содержит шасси, включающее в себя переднее колесо относительно большого диаметра, прочно закрепленное в передней части шасси, и пару задних колес меньшего диаметра, шарнирно закрепленных в задней части шасси. В одном из вариантов осуществления изобретения, самокат выполнен с возможностью осуществления рулевого управления посредством углового рыскания задних колес относительно шасси. Такое угловое рыскание обеспечивается несимметричной нагрузкой шасси, которое приводит к боковому качанию шасси. Боковое качание может быть вызвано неравномерной весовой нагрузкой левой и правой сторон шасси, что, в свою очередь, приводит к вращению и рысканию задних колес, с помощью чего и осуществляется рулевое управление самокатом.
В широком смысле этого слова, самокат включает в себя шасси, неповоротное (то есть неуправляемое) переднее колесо, установленное в передней части шасси, и пару задних колес, обладающих свойством углового рыскания, установленных в задней части шасси. Шасси образует продольную ось между передней и задней частями. Шасси может включать в себя опорный узел, обычно имеющий горизонтально ориентированное положение и проходящий от передней к задней части, служащий опорой наезднику или пользователю в положении равновесия.
Кроме того, самокат может содержать узел ручки, расположенный перед узлом подножки и направленный вверх. Узел ручки может быть выполнен в виде единого вертикального элемента, часть которого предназначена для захвата (то есть ручной рукоятки) одной из рук наездника. В качестве альтернативного варианта осуществления изобретения, узел ручки может быть выполнен в виде пары боковых элементов, каждый из которых снабжен ручными рукоятками, подобно тому, как это делается на рулях стандартной конструкции. Независимо от своей конструкции, узел ручки является средством стабилизации положения наездника или пользователя самоката.
Предпочтительно, задние колеса располагаются в боковой плоскости относительно друг друга и, как уже упоминалось выше, выполнены таким образом, чтобы обеспечить угловое рыскание относительно продольной оси. В этом отношении задние колеса выполнены с возможностью вращения или рыскания между нейтральным положением и положением рыскания. В нейтральном положении ось задних колес ориентирована перпендикулярно относительно продольной оси. В положении рыскания задние колеса занимают неперпендикулярное положение относительно продольной оси. Рулевое управление самоката осуществляется исключительно или в значительной мере за счет углового рыскания задних колес между нейтральным положением и положением рыскания.
Предпочтительно, подножка выполнена с возможностью бокового качания относительно продольной оси. Такое боковое качание может быть осуществлено за счет несимметричной нагрузки с левой либо правой стороны на опорный узел. Несимметричная нагрузка создается наездником, прилагающим направленное вниз давление на левую или правую сторону опорного узла, что, например, можно осуществить перекладыванием веса с помощью ног наездника. Эта несимметричная нагрузка и боковое качание опорного узла приводят к угловому рысканию задних колес, которое заставляет самокат поворачивать.
Предпочтительно, задние колеса шарнирно крепятся к опорному узлу посредством цапфы, включающей заднюю ось. В одном из вариантов осуществления изобретения, задние колеса устанавливаются на противоположных концах оси. Цапфа крепится к опорному узлу посредством шкворня, направленного вверх с задней оси. Шкворень соединяет заднюю ось с опорным узлом. В узел крепления задней оси к опорному узлу могут быть включены смещающие элементы. Смещающий элемент может придать задней оси свойства автоматического управления или автоматической стабилизации, что будет более подробно описано ниже.
В общем плане, шкворень ориентирован в наклонной плоскости относительно продольной оси. Более конкретно, шкворень может иметь верхние и нижние торцы и отклоняться так, чтобы нижний торец располагался впереди верхнего торца. Таким образом, шкворень ориентирован вниз по направлению из задней части шасси по отношению к передней части. Отклонение шкворня вниз приводит к угловому рысканию задних колес, при этом опорный узел производит боковое качание вправо или влево. Движение бокового качания опорного узла пропорционально градусу углового рыскания заднего колеса. Результирующий эффект этого сочетания воздействий позволяет наезднику выполнять поворот с большими углами рыскания задних колес, соответствующими большим значениям движения бокового качания опорного узла.
Например, если наездник хочет выполнить поворот самоката направо, наездник асимметрично загружает правую сторону опорного узла, что приводит к боковому качанию правой стороны или направленному вниз вращению относительно продольной оси, тогда как левая сторона опорного узла вращается вверх. Одновременно, задняя ось производит угловое рыскание, так что заднее колесо с правой стороны продольной оси движется вперед, в то время как заднее колесо с левой стороны делает движение назад. Это угловое рыскание приводит к тому, что во время движения вперед самокат перенаправляется вправо (то есть в точку, расположенную справа).
Считается, что цапфа может быть выполнена так, что величина углового рыскания задней оси относительно продольной оси составит, по меньшей мере, около 45°. Тем не менее, цапфа может быть выполнена с возможностью рыскания задней оси до половинных углов меньших или больших величин. В дополнение к цапфе может быть установлен смещающий элемент, который технологически совместим с цапфой. Предпочтительно, смещающий элемент выполнен с возможностью смещения задней оси по отношению к нейтральному положению для обеспечения действия механизма автоматического рулевого управления. Таким образом, после осуществления каждого поворота обеспечивается возврат задней оси в положение отсутствия рысканья (то есть, нейтральное положение).
Кроме того, смещающий элемент обеспечивает работу механизма автоматической стабилизации самоката, посредством чего задняя ось может лучше оказывать противодействие нежелательным раскачиваниям или колебаниям опорного узла при движении самоката на высокой скорости. Кроме того, смещающий элемент обеспечивает автоматическую остановку самоката при возвращении опорного узла в горизонтальное или выровненное положение, что происходит, когда наездник сходит с самоката. Когда наездник сходит с самоката или же когда самокат неподвижен, узел ручки также возвращается в вертикальное положение.
Кроме того, самокат может содержать шарнирное соединение на переднем торце опорного узла. В качестве альтернативного варианта осуществления изобретения, шарнирное соединение может быть установлено так, чтобы соединять опорный узел с узлом ручки. Независимо от своего конкретного расположения на шасси, шарнирное соединение представляет собой удачное дополнительное средство содействия движению боковому качанию опорного узла. Более конкретно, шарнирное соединение обеспечивает движение бокового качания опорного узла, на котором стоит наездник, в направлении, противоположном направлению движения узла ручки. Шарнирное соединение может обеспечить альтернативный способ движения самоката вперед в результате бокового качания опорной рамы в противофазе с узлом ручки так, как это будет более подробно описано ниже.
Самокат может дополнительно содержать систему подвески, соединенную с, по меньшей мере, одним из передних и задних колес, и предназначенную для поглощения толчков, которые в противном случае передавались бы на наездника при движении по пересеченной местности. Более конкретно, система подвески предпочтительно выполнена с возможностью обеспечения вертикального отклонения переднего и/или задних колес относительно шасси, что может оказаться полезным, если приходится сталкиваться с гравийным покрытием, трещинами в дорожном покрытии или другими естественными либо искусственными препятствиями.
Краткое описание чертежей
Ниже приводятся эти, а также другие признаки настоящего изобретения со ссылками на прилагаемые чертежи, на которых:
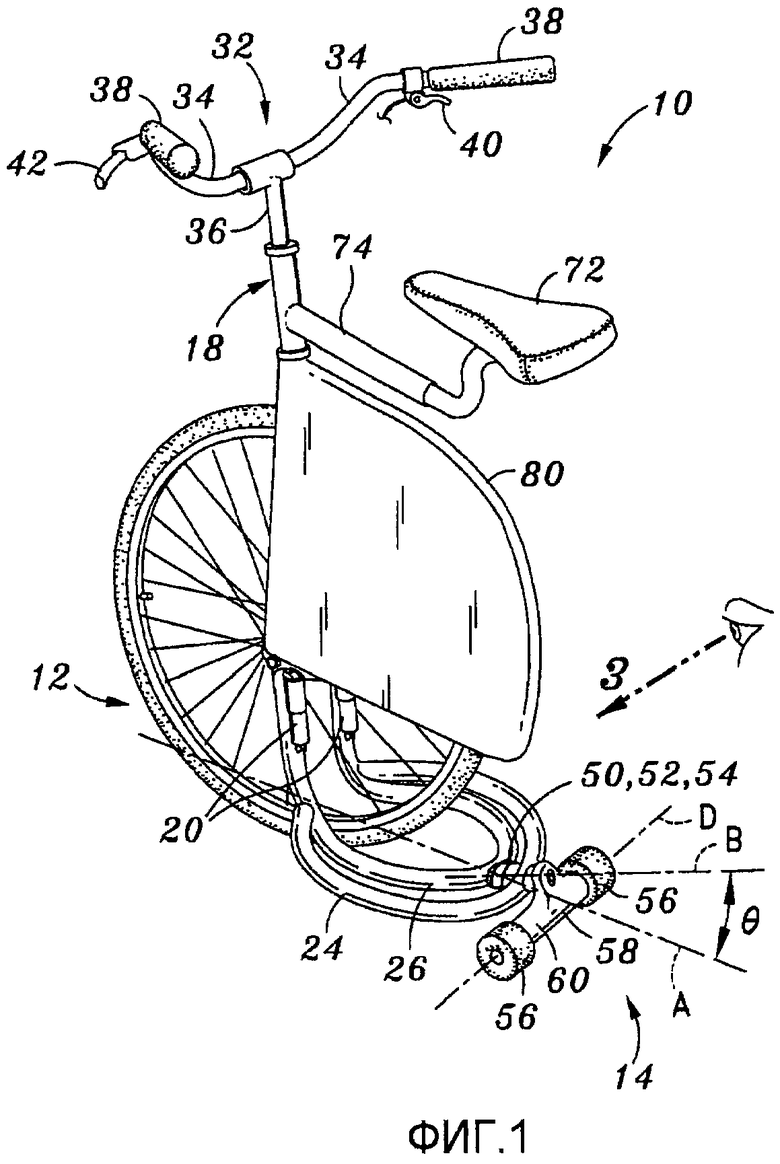
фиг.1 - вид в перспективе трехколесного самоката с задними управляемыми колесами, имеющего переднее колесо, жестко закрепленное в передней части узла шасси, и пару задних колес, шарнирно закрепленных в задней части шасси;
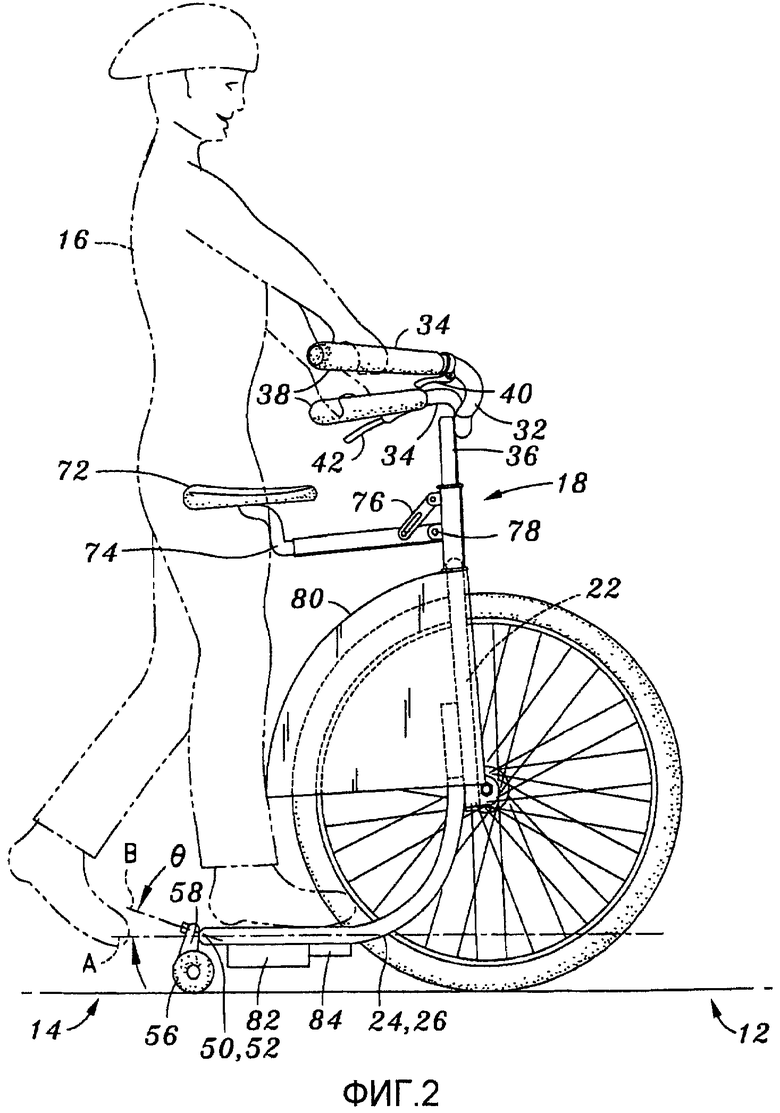
фиг.2 - вид сбоку самоката, представленного на фиг.1, на котором изображено седло, выступающее в боковом направлении из узла шасси и предназначенное для обеспечения опоры пользователю;
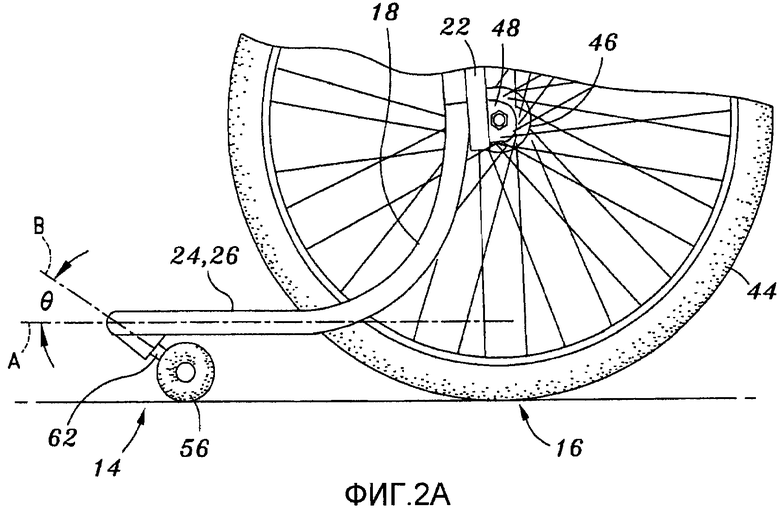
Фиг.2а - увеличенный вид сбоку узла шасси, на котором показано наклонное положение оси, относительно которой вращаются задние колеса и которая обеспечивает угловое рыскание задних колес для рулевого управления самоката;
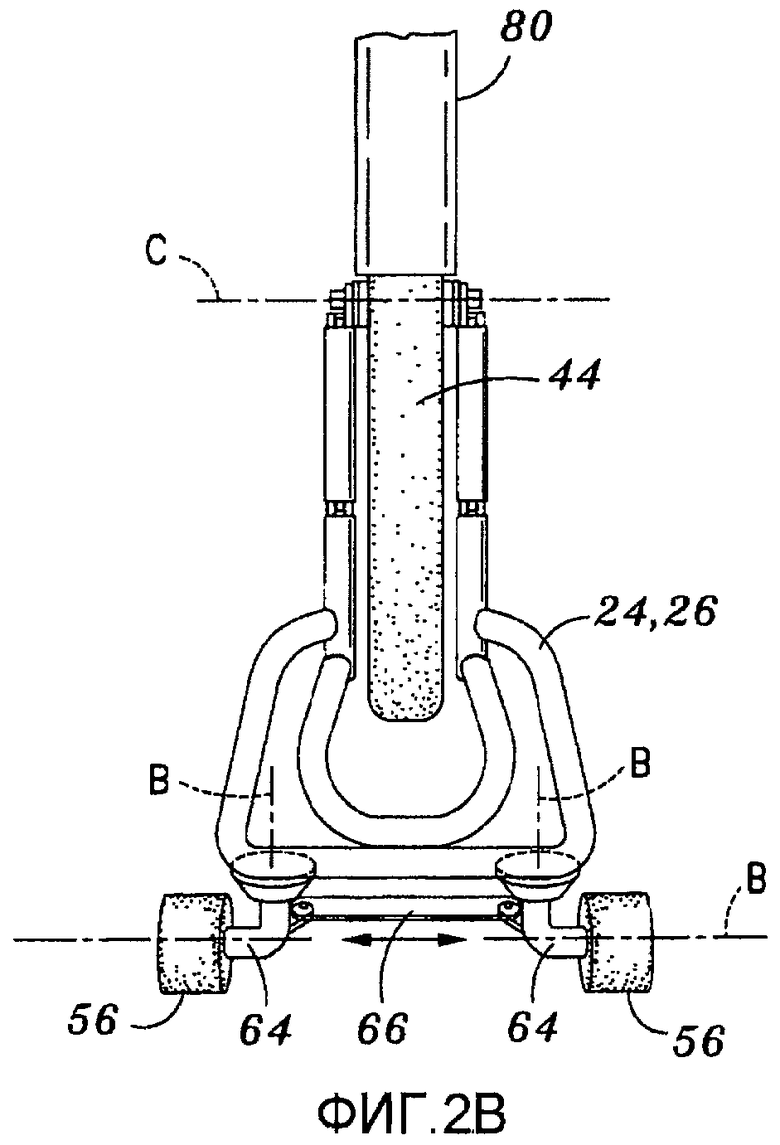
Фиг.2b - вид сзади задних колес, на котором показано независимое поворотное крепление каждого заднего колеса и связь задних колес, обеспечивающая их синхронное угловое рыскание;
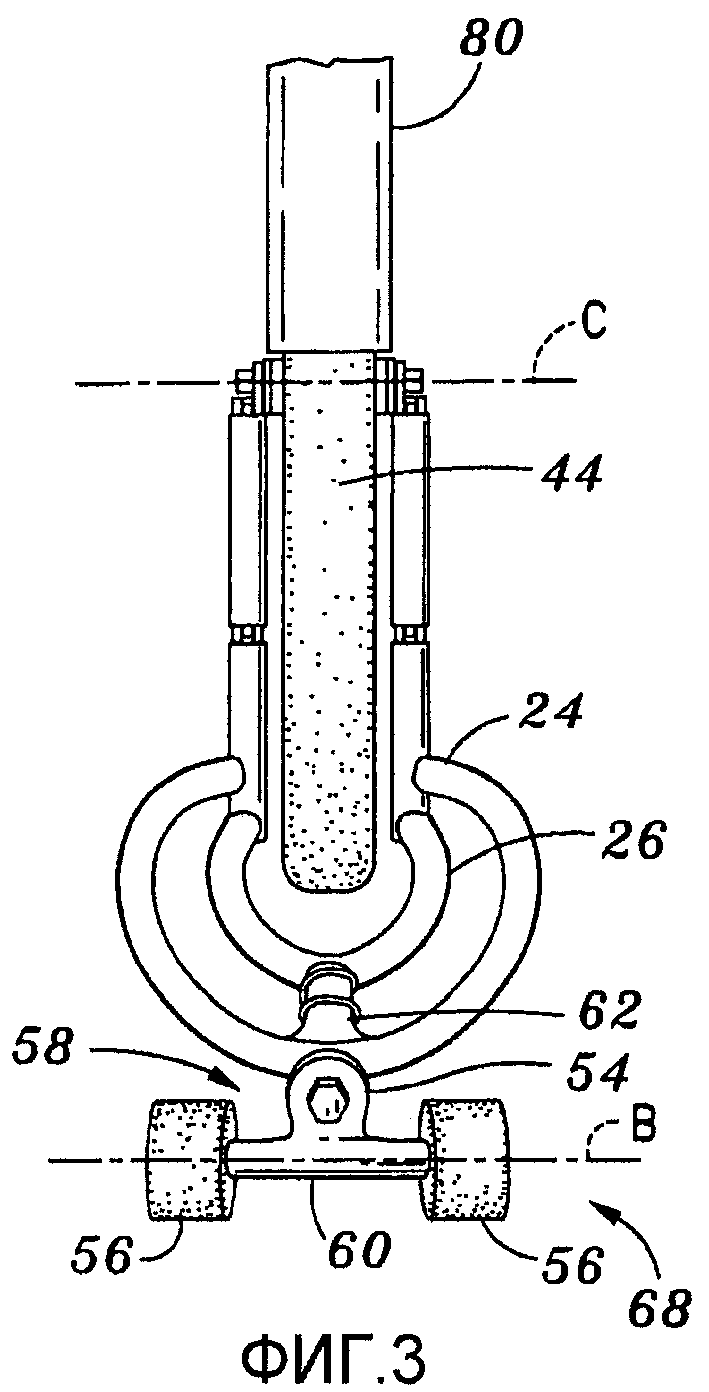
фиг.3 - задний вид самоката, на котором показана цапфа, включающая в себя заднюю ось и шкворень и соединяющая заднюю ось и шасси;
фиг.4 - боковой вид самоката, на котором показан наездник, прилагающий движение бокового качания к шасси для осуществления углового рысканья задних колес;
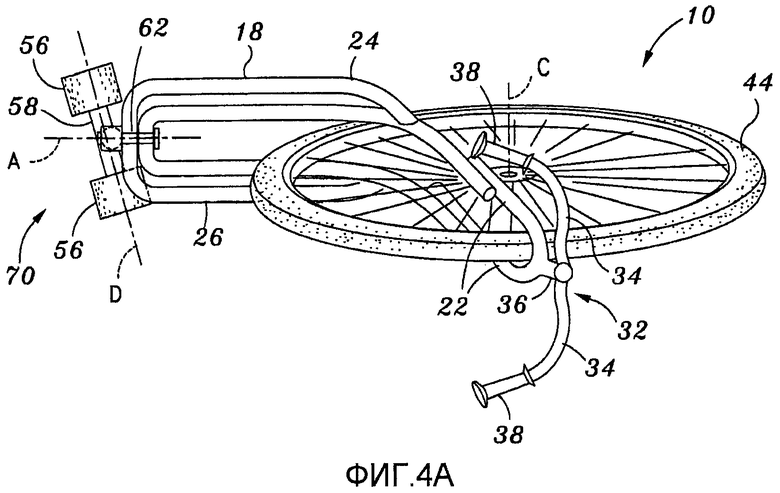
фиг.4а - вид сверху самоката вдоль линии 4а фиг.4, на котором показан угол рыскания задних колес относительно продольной оси самоката при повороте;
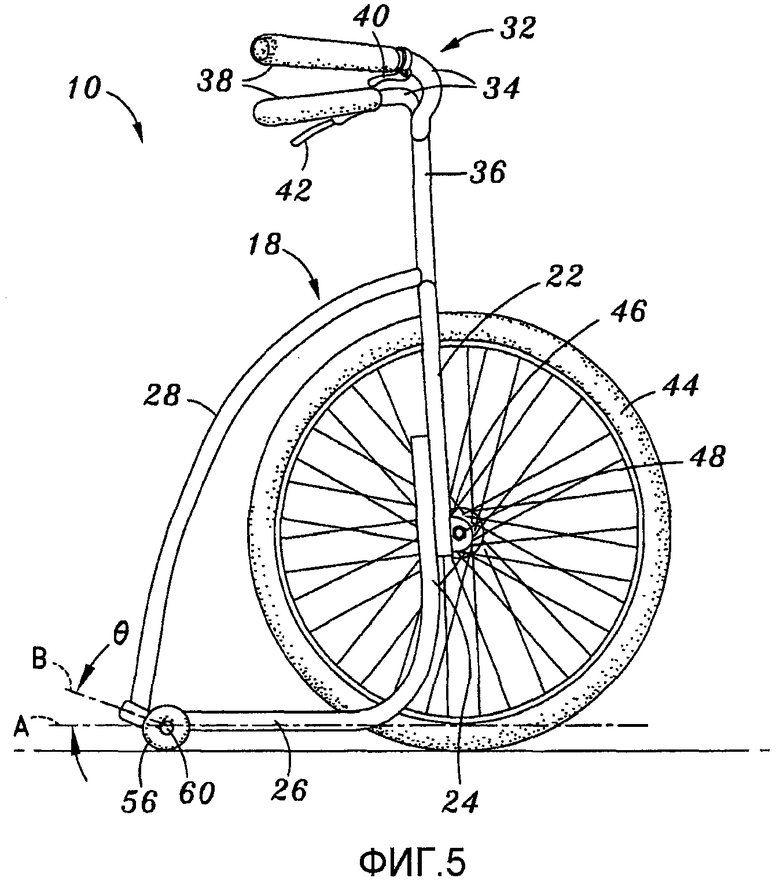
фиг.5 - вид сбоку самоката в варианте осуществления изобретения со стойкой, проходящей вниз от узла ручки;
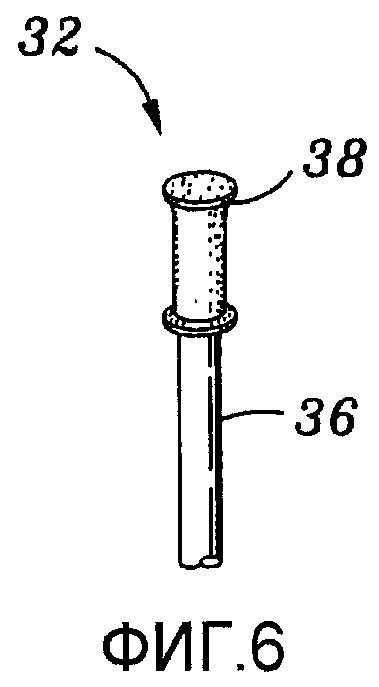
фиг.6 - вид сбоку установленного вертикально узла ручки, выполненного с возможностью стабилизации пользователя самоката по сравнению с рулевым узлом, показанной на фиг.1, 2 и 4;
фиг.7 - вид сбоку самоката в альтернативном варианте осуществления изобретения, в котором шасси включает в себя шарнирное соединение для обеспечения движения бокового качания опорного узла относительно переднего колеса самоката.
Подробное описание изобретения
Теперь обратимся к чертежам, на которых представлены, включая, но не ограничиваясь, различные предпочтительные варианты осуществления настоящего изобретения. На чертежах представлен трехколесный самокат 10 с задними управляемыми колесами. В широком смысле этого слова, самокат 10 включает в себя шасси 18 с передним колесом 44 и парой задних колес 56, шарнирно закрепленных на шасси 18 так, чтобы обеспечить угловое рыскание для управления самокатом 10. Как показано на фиг.1 и 2, шасси 18 имеет переднюю часть 12 и заднюю часть 14 и образует собой продольную ось, проходящую от передней части 12 до задней части 14. Шасси 18 может включать в себя имеющий обычно горизонтально ориентированное положение опорный узел 24, к которому крепятся задние колеса 56. Опорный узел 24 может включать в себя подножку 26, на которой при управлении самокатом 10 могут стоять пользователь 16 или наездник самоката.
Переднее колесо 44 нешарнирно (то есть жестко, а именно - с возможностью вращения, но без возможности поворота) крепится к передней части 12 шасси 18. Шасси 18 может дополнительно включать добавочный узел 32 ручки, который предпочтительно располагается перед опорным узлом 24 и который проходит вверх от опорного узла 24, как показано на фиг.1-2 и 4-7. В одном варианте осуществления изобретения, узел 32 ручки жестко связан с помощью соответствующего средства (например, механического крепежа, сварки, и т.п.) с опорным узлом 24. Тем не менее, опорный узел 24 и узел 32 ручки могут образовывать единую конструкцию.
В качестве альтернативного варианта, узел 32 ручки и опорный узел 24 могут быть соединены шарнирным соединением 30, для обеспечения движения относительного бокового качания между ними, как будет более подробно описано ниже. Узел 32 ручки выполнен с возможностью обеспечить средство стабилизации или балансирования для наездника или пользователя 16 в положении стоя при управлении самокатом 10. Для вариантов осуществления изобретения, в которых опорный узел 24 и узел 32 ручки жестко соединены между собой, узел 32 ручки является также средством управления самокатом 10, в результате действий наездника, прилагающего боковое усилие к узлу 32 ручки. Из-за жесткого соединения между узлом 32 ручки и опорным узлом 24 движение бокового качания узла 32 ручки передается на опорный узел 24. Результирующее движение бокового качания опорного узла 24 приводит к возникновению движения углового рыскания задних колес 56, с помощью которых осуществляется рулевое управление самокатом 10, как будет более подробно описано ниже.
Как лучше всего показано на фиг.1 и 2b, задние колеса 56 установлены в задней части 14 опорного узла 24 таким образом, что задние колеса 56 располагаются в боковой плоскости относительно друг друга. Крепление задних колес 56 к опорному узлу 24 может производиться с помощью цапфы 58, которая может включать в себя заднюю ось 60 со шкворнем 62, исходя, например, из средней точки задней оси 60. Как показано на фиг.1 и 3, задние колеса 56 вращаются относительно оси задних колес D и специально выполнены с возможностью углового рыскания по отношению к продольной оси А между нейтральным положением 68 (то есть тем, что показано на фиг.1) и положением рыскания 70 (показано на фиг.4а). Важно также, что поскольку переднее колесо 44 жестко прикреплено к шасси 18 (то есть прикреплено не шарнирно), управление самокатом 10 осуществляется в значительной мере или исключительно за счет углового рыскания или вращения задних колес 56 относительно продольной оси А.
Как показано на фиг.4а, опорный узел 24 выполнен с возможностью бокового качания относительно продольной оси А. В одном из вариантов осуществления самоката 10, движение бокового качения опорного узла 24 приводит к рысканию задних колес 56, что обеспечивает работу рулевого механизма самоката 10. Например, пользователь 16 может повернуть самокат 10 путем асимметричной нагрузки правой или левой стороны опорного узла 24 и, из-за расположения оси качания В под углом θ, приводит задние колеса 56 к рысканию против часовой стрелки относительно продольной оси А, как лучше всего видно на фиг.4а. Более конкретно, на фиг.4а показано рыскание против часовой стрелки задних колес 56 относительно продольной оси в результате перекладывания веса или нагрузки правой стороны опорного узла 24.
На фиг.2 показан пользователь 16, стоящий на подножке 26 правой ногой, на которую приходится весь или большая часть веса пользователя. Эта несимметричная нагрузка на правую сторону опорного узла 24 приводит к возникновению движения бокового качания, которая порождает движение углового рыскания задних колес 56 в положении, показанном на фиг.4а. Напротив, нагрузка левой стороны опорного узла 24 имела бы обратный эффект, ведущий к возникновению движения рыскания по часовой стрелке задних колес 56 относительно продольной оси при выполнении левого поворота. Можно сделать вывод, что пользователь 16 может направленно управлять самокатом 10 при движении вперед, путем варьирования несимметричной нагрузки на правую и левую сторону опорного узла 24. Приложение несимметричной нагрузки может осуществляться просто за счет перекладывания веса пользователя на левую или правую ногу.
В одном варианте осуществления изобретения, например, показанном на фиг.4а, цапфа 58, к которой крепятся задние колеса 56, предпочтительно выполнена с возможностью обеспечения способности к рысканью задней оси 60 относительно продольной оси на величину половинного угла около 45°. Тем не менее, следует отметить, что цапфа 58 может быть выполнена с возможностью обеспечения любой степени углового рыскания. Как можно видеть на фиг.1 и 3, задние колеса 56 предпочтительно установлены на противоположных концах задней оси 60.
В предпочтительном варианте осуществления изобретения, шкворень 62 расположен не вертикально и не горизонтально, так что несимметричная нагрузка опорного узла 24 приводит к угловому рысканию задних колес 56. Еще более предпочтителен вариант осуществления изобретения, в котором шкворень 62 предпочтительно расположен под углом θ так, что боковое качание опорного узла 24 приводит к движению одного заднего колеса 56 вперед, в то время как заднее колесо 56 на противоположной стороне перемещается назад. Такая конструкция позволяет пользователю 16 осуществлять поворот на значительно большие величины по сравнению с величинами движения бокового качания.
В предпочтительном варианте осуществления изобретения, способность выполнять повороты позволяет пользователю 16 противодействовать центробежным силам, которые стремятся выбросить наездника на внешнюю сторону радиуса поворота. Хотя шкворень 62 предпочтительно ориентирован с возможностью для наездника выполнять повороты (то есть обеспечивает перемещение центра тяжести наездника по отношению к внутренней стороне радиуса поворота), предусматривается, что шкворень 62 может быть применен в ряде других конструкций. Например, шкворень 62 может быть ориентирован таким образом, что несимметричная нагрузка одной стороны опорного узла 24 приводит к угловому рысканию задних колес 56 в противоположном направлении.
Тем не менее, как лучше всего показано на фиг.1, 2 и 6, предпочтительным вариантом осуществления изобретения является тот, в котором ось качания В отклонена под углом θ относительно продольной оси таким образом, что ось качания В ориентирована вниз по направлению из задней части 14 по отношению к передней части 12 шасси 18. Более конкретно, шкворень 62 имеет верхние и нижние торцы и наклонен так, что нижний торец шкворня 62 располагается впереди верхнего торца шкворня 62.
Как упоминалось ранее, когда опорный узел 24 осуществляет боковое качание налево или направо, наклонный шкворень 62 обеспечивает механическое управление задних колес 56 в процессе рысканья, в направлении, противоположном направлению предполагаемого поворота самоката 10. Например, если пользователь 16 хочет выполнять поворот направо самоката 10, то пользователь 16 может асимметрично нагрузить правую сторону опорного узла 24, что приводит к возникновению направленного вниз бокового качания опорного узла 24. Это направленное вниз боковое качание опорного узла 24 заставляет задние колеса 56 вращаться в противоположном направлении. Таким образом, перекладывание веса пользователем 16 на подножке 26 приводит к возникновению бокового качания, что, в свою очередь, вызывает угловое рыскание или поворот задних колес 56. Чем больше степень несимметричной нагрузки опорного узла 24, тем больше степень углового рыскания (то есть, меньше радиус поворота).
Как показано на чертежах, узел 32 ручки расположен впереди и направлен вверх из опорного узла 24 обычно в вертикальной плоскости. В варианте осуществления изобретения, показанном на фиг.6, узел 32 ручки включает в себя вертикальный элемент 36, который проходит вверх от пары нижних труб 22 или вилки, к которой крепится переднее колесо 44. Вертикальный элемент 36 выполнен так, чтобы удерживаться пользователем 16 для стабилизации и/или балансировки при езде на самокате 10. Кроме того, узел 32 ручки обеспечивает также боковое качание опорного узла 24 за счет жесткого соединения этих элементов между собой. Таким образом, пользователь 16 может осуществлять управление с помощью узла 32 ручки сочетанием несимметричной нагрузки опорного узла 24 и бокового качания узла 32 ручки с тем, чтобы достичь более высоких показателей рыскания задних колес 56.
Дальнейшее рассмотрение фиг.6 показывает, что вертикальный рычаг 36 узла 32 ручки может устанавливаться с эргономичной захватной частью 38 или рукояткой, за которую может держаться пользователь 16. Шасси 18 может дополнительно включать в себя аркообразную стойку 28, проходящую от узла 32 ручки. Стойка 28 предпочтительно выровнена с передним колесом 44 и соединена с подножкой 26 в своей нижней части. Стойка 28 может дополнительно усилить общую твердость конструкции, жесткость на кручение и общую прочность шасси 18. Дополнительная жесткость на кручение и прочность могут понадобиться при исполнении определенных маневров или управлении самокатом 10 на пересеченной местности.
Стойка 28 предпочтительно выполнена так, что при управлении самокатом 10 ноги пользователя располагаются по обеим сторонам от стойки 28. Тем не менее, стойка 28 вполне может быть удалена и шасси 18 предстанет в компоновке, показанной на фиг.1 и 2. В вариантах осуществления изобретения, в которых нет стойки 28, опорный узел 24 и узел 32 ручки предпочтительно имеют размеры, необходимые для совместного обеспечения достаточной прочности и твердости шасси 18.
В соответствии с фиг.1, 2 и 3, самокат 10 может дополнительно включать в себя смещающий механизм или смещающие элементы 54, конструктивно подсоединенные к цапфе 58 и выполненные с возможностью смещения задней оси 60 в нейтральное положение 68. Как уже упоминалось ранее, когда задняя ось 60 находится в нейтральном положении 68, задняя ось 60 обычно располагается перпендикулярно относительно продольной оси А шасси 18. При наличии смещающих элементов 54, они предпочтительно вызывают возврат задних колес 56 из положения рыскания 70, как показано на фиг.4а, в положение отсутствия рыскания или нейтральное положение 68, как показано на фиг.1. В этом отношении, смещающие элементы 54 оказывают противодействие боковому качанию или наклону опорного узла 24 и вызывают возврат опорного узла 24 в положения отсутствия качания, что приводит к желательной стабилизации самоката 10.
Кроме того, смещающие элементы 54 предпочтительно выполнены с возможностью обеспечения прогрессивно возрастающей степени жесткости или смещающего усилия при прогрессивно возрастающих углах рыскания задних колес 56. Прогрессивно возрастающая степень жесткости смещающих элементов 54 предотвращает также колебания или раскачивания опорной платформы (то есть из стороны в сторону), что важно при передвижении на высокой скорости. Дополнительным преимуществом, обеспечиваемым смещающими элементами 54, является стабилизация самоката 10, если он неподвижен или припаркован, при этом узел 32 ручки и переднее колесо 44 удерживаются в вертикальном положении. В целом, смещающие элементы 54 обеспечивают стабильность самоката 10 на малых и больших скоростях, оказывая противодействие движению бокового качания опорного узла 24.
Смещающие элементы 54 могут входить в различные варианты компоновок, включая, но не ограничиваясь, элементом или компонентом, выполненным из резины, установленным между опорным узлом 24 и цапфой 58 с тем, чтобы оказывать противодействие относительному движению между задней осью 60 и опорным узлом 24. В качестве альтернативного решения, между задней осью 60 и опорным узлом 24 может быть установлена пружина 50 или пара пружин с тем, чтобы оказывать противодействие движению бокового качания. Возможно также использование пружинного демпфера 52 вместе со смещающими элементами 54 с тем, чтобы уменьшить ход пружины 50 смещающих элементов 54 и тем самым обеспечить дополнительную стабилизацию самоката 10.
В альтернативном варианте осуществления изобретения, представленном на фиг.2b, каждое заднее колесо 56 крепится индивидуально посредством пары обычно вертикально ориентированных шпинделей 64. Каждый из шпинделей 64 определяет ось качания В, относительно которой вращаются задние колеса 56. Как показано на фиг.2b, пара задних колес 56 может быть связана между собой перемычкой 66 или рулевой тягой. В этом варианте осуществления изобретения, задние колеса 56 механически связаны друг с другом таким образом, что задние колеса 56 могут осуществлять синхронное рыскание относительно соответствующих осей качания В.
Кроме того, на фиг.2b показан управляющий рычаг, прикрепленный к каждому шпинделю 64 для соединения задних колес 56 посредством перемычки 66 или рулевой тяги. По меньшей мере, один из шпинделей 64 может содержать рулевую сошку (не показана), прикрепленную к одному из задних колес 56. Вращательное движение, передаваемое на одно из задних колес 56 посредством управляющего рычага, в свою очередь, передается на другое заднее колесо 56 посредством перемычки 66. Таким образом, управление самокатом 10 может осуществляться с помощью ножного либо ручного механизма рулевого управления, таким, например, как рычаг (не показано), который сообщает вращательное движение на управляющий рычаг и которое затем передается на задние колеса 56.
Как показано на фиг.1, самокат 10 может дополнительно включать систему подвески 20, конструктивно соединенную, по меньшей мере, с одним из передних и задних колес 44, 56. Система подвески 20 предпочтительно выполнена с возможностью обеспечения вертикального отклонения переднего 44 и/или задних колес 56 относительно шасси 18, что может произойти при езде по пересеченной местности или при встрече с небольшими препятствиями, такими, как, например, гравийное покрытие, трещины в дорожном покрытии или большие швы между плитами тротуара. Система подвески 20 может содержать пару пружинных механизмов, например амортизаторов, которые могут дополнительно включать в себя демпфер 52 с тем, чтобы управлять ходом отбоя и гасить колебания пружинных механизмов.
Как показано на фиг.1, система подвески 20 может содержать узел амортизатора со встроенными друг в друга нижними трубками 22, расположенными на противоположных сторонах переднего колеса 44. Каждый амортизатор может заканчиваться фланцем 48, расположенным на каждой из нижних трубок 22. Фланец 48 поддерживает ступицу 46 переднего колеса 44, при этом переднее колесо 44 может вращаться относительно оси С переднего колеса. В качестве альтернативного решения, система подвески 20 может быть выполнена в другой компоновке, например, с пружиной 50 и/или демпферным узлом 52, встроенным в вертикальный рычаг 36, расположенный непосредственно над нижними трубками 22. Кроме того, предусмотрено, что задние колеса 56 могут содержать систему подвески 20 между опорным узлом 24 и цапфой 58, например, с тем, чтобы обеспечить вертикальное отклонение задних колес 56 относительно шасси 18, что может произойти при прохождении задних колес 56 по пересеченной местности.
На фиг.4 показан самокат 10 с узлом 32 ручки, по меньшей мере, за одну из боковых рукояток 34 которой может держаться пользователь 16 для стабилизации при ровной и прямой езде, а также при выполнении маневров поворота. Каждая боковая рукоятка 34 может быть снабжена захватной частью 38 с тем, чтобы обеспечить безопасный захват рукоятки руками пользователя.
Хотя узел 32 ручки представляется схожим по конструкции с обычным рулевым узлом, нужно подчеркнуть, что переднее колесо 44 не поворотно соединено с шасси 18 и, следовательно, не обеспечивает той управляемости, которая обычно заложена в конструкции велосипеда. В этом отношении, управление самокатом 10 осуществляется в основном или исключительно угловым рысканием задних колес 56 в ответ на боковое качание опорного узла 24 в результате переноса веса и/или в результате бокового движения узла 32 ручки из стороны в сторону. Узел 32 ручки предпочтительно расположен на высоте, пригодной для удобного захвата пользователем 16 в положении стоя или сидя. Предусмотрена регулировка узла 32 ручки по высоте, с тем, чтобы самокатом могли пользоваться наездники разных габаритов. Кроме того, боковые рукоятки 34 могут поставляться в сменной компоновке с тем, чтобы имелась возможность установки узлов ручки, отличающихся по ширине, форме и/или угловому расположению.
На фиг.1 и 2 представлен самокат 10, который может дополнительно содержать сиденье 72, установленное на подседельной стойке 74, проходящей вбок к задней части из верхней части узла 32 ручки. Седло 72 предпочтительно установлено на подседельной стойке 74 на высоте, удобной при пользовании и посадке для пользователя 16, так что колени наездника оказываются в несколько согнутом положении. Кроме того, седло 72 может быть регулируемым по высоте, с тем, чтобы быть удобным пользователям 16 разного роста. Помимо того, седло 72 предпочтительно выполняется с возможностью шарнирного крепления к узлу 32 ручки, так что подседельная стойка 74 обычно складывается параллельно узлу 32 ручки. В сложенном состоянии подседельная стойка 74 минимизирует общий объем, занимаемый самокатом 10, что облегчает отгрузку и хранение самоката 10.
Для обеспечения вращения подседельной стойки 74 самокат 10 может дополнительно включать шлицованную скобу 76, на одном торце которой имеется шлиц со стопором, который выполнен с возможностью установки в него стопорного штифта из опорного узла 24, как показано на фиг.2. В этом варианте осуществления изобретения, вращение вверх подседельной стойки 74 обеспечивается сначала съемом стопора со штифта, так чтобы штифт мог пройти через шлиц при вращении подседельной стойки 74 вверх.
На фиг.7 представлен дополнительный вариант самоката 10, в котором шасси 18 снабжено шарнирным соединением 30, установленным между опорным узлом 24 и узлом 32 ручки в передней нижней части шасси 18. Шарнирное соединение 30 выполнено с возможностью торсионного соединения горизонтально ориентированного опорного узла 24 с вертикально ориентированным узлом 32 ручки. В этом отношении, шарнирное соединение 30 выполнено с возможностью обеспечения бокового качения опорного узла 24 в направлении, противоположном направлению узла 32 ручки.
Шарнирное соединение 30 представляет собой средство, с помощью которого пользователь 16 может обеспечить движение самоката путем бокового качения подножки 26 (то есть за счет ее несимметричной нагрузки) в противофазе с узлом 32 ручки. Тем самым генерируется движущая сила, которая затем преобразуется в поступательное движение самоката 10. Шарнирное соединение 30 может дополнительно содержать смещающее средство, например, спиральную пружину 50 и/или демпферное средство с тем, чтобы обеспечить смещение опорного узла 24 и узла 32 ручки в нейтральное положение и обеспечить движение в противофазе опорного узла 24 относительно узла 32 ручки. Такая конструкция обеспечивает также управляемость самоката 10, равно как и его способность занимать устойчивое положение в течение времени, когда самокат 10 не используется. Кроме того, смещающее средство обеспечивает сопротивление качания опорного узла 24 относительно узла 32 ручки и этим самым стабилизирует самокат 10 при движении на малых скоростях.
На фиг.7 показано, что седло 72 может устанавливаться в альтернативном варианте осуществления изобретения, в котором подседельная стойка 74 проходит вертикально вверх от подножки 26 с тем, чтобы обеспечивать управление самокатом 10 в положении сидя. К подножке 26 может крепиться пара скоб 76, с тем, чтобы увеличить грузоподъемность подседельной стойки 74 под весом пользователя 16, сидящего на седле 72. Подножка 26 предпочтительно выполнена с возможностью обеспечения достаточной площади для размещения ног пользователя при посадке в седло 72.
На фиг.2 показано, что самокат 10 может дополнительно быть оснащенным двигателем 82 с приводом на, по меньшей мере, одно из передних и задних колес 44, 56. Двигатель 82 выполнен с возможностью подачи вращательного движения на переднее и/или задние колеса 44, 56 с тем, чтобы обеспечить движение самоката 10. Двигатель 82 может быть выполнен в виде электродвигателя 82 с приводом на задние колеса 56 и, посредством вала двигателя, соединяться с задней осью 60. Питание двигателя 82 может осуществляться от источника 84 питания, например батареи или аккумулятора, который вместе с двигателем 82 может устанавливаться под подножкой 26, как, например, это показано на фиг.2. Предпочтительно, двигатель 82 и/или источник 84 питания устанавливаются таким образом, чтобы предоставить достаточный дорожный просвет для обеспечения движения бокового качания опорного узла 24 при управлении самокатом 10.
Регулировки двигателя 82 обеспечиваются с помощью дросселя 40, который может быть установлен на узле 32 ручки, как показано на фиг.2, 4, и 5. Торможение или замедление движения самоката 10 могут обеспечиваться с помощью тормозного механизма, например дискового тормоза или тормоза, действующего на обод колеса посредством тормозного рычага 42, установленного на, по меньшей мере, одной из противоположных боковых рукояток 34, как показано на фиг.2, 4 и 5.
На фиг.1-4 показана общая компоновка шасси 18, включающая в себя установленный горизонтально опорный узел 24, образующий опорную поверхность, на которую может вставать пользователь 16, и к которому шарнирно крепятся задние колеса 56. В варианте осуществления изобретения, показанном на фиг.3, подножка 26 может включать в себя ряд конструктивных элементов, таких, например, как трубчатые элементы, которые выполнены с возможностью обеспечения достаточной площади поверхности для того, чтобы наездник мог поставить на них обе ноги.
В отношении геометрического соотношения различных компонентов самоката 10, переднее колесо 44 является предпочтительно пневматическим колесом относительно большого диаметра (например, 12 дюймов-28 дюймов), предпочтительно снабженным протектором шириной обычно менее 2 дюймов, хотя предусмотрены и более широкие шины. Само строение поперечного сечения протектора шины предпочтительно выполнено по радиусу так, чтобы обеспечить движение бокового качения переднего колеса 44. Диаметр переднего колеса 44 предпочтительно в 6-10 раз превышает диаметр задних колес 56. Ширина каждого из задних колес 56 предпочтительно равна диаметру задних колес 56, хотя предусмотрено различное соотношение величин ширина/диаметр. Также, задние колеса 56 предпочтительно имеют обычно плоскую поверхность протектора с тем, чтобы максимизировать силу бокового сцепления при повороте.
Как уже указывалось ранее, управление самокатом 10 обеспечивается угловым рысканием задних колес 56 в ответ на несимметричную нагрузку или перекладыванием веса на опорном узле 24 пользователем 16. При воздействии неравномерной нагрузки на подножку 26 движение бокового качения опорного узла 24 и узла 32 ручки, к которому подсоединено переднее колесо 44, приводит к угловому рысканию или повороту задних колес 56. Чем больше величина бокового качения шасси 18 или опорного узла 24, тем больше движение углового рыскания на задних колесах 56, что приводит к сокращению радиуса поворота самоката 10.
Поскольку общая площадь контактной поверхности задних колес 56 больше, нежели контактная поверхность переднего колеса 44, управление самокатом 10 достигается в основном за счет углового рыскания или поворотного смещения задних колес 56 по отношению к продольной оси А. Сила сцепления задних колес 56 может быть максимизирована путем оптимизации степени соответствия задних колес 56 относительно величины бокового качения опорного узла 24. Таким образом, задние колеса 56 могут удерживать контакт с грунтом при управлении самокатом 10 независимо от угла рыскания задних колес 56.
Самокат 10 может быть дополнительно оснащен принадлежностями или иметь дополнительные признаки. Например, как показано на фиг.1 и 2, может быть установлено крыло 80 для предотвращения контакта пользователя 16 с передним колесом 44. Как можно увидеть, крыло 80 может быть соединено с нижними трубками 22 узла 32 ручки.
Также, могут быть предусмотрены небольшие крылья 80 над каждым задним колесом 56, с тем, чтобы предотвратить случайный контакт с ногой наездника. Самокат 10 может быть дополнительно оснащен механизмом против опрокидывания, проходящим вниз от задней части опорного узла 24 и предназначенным для предотвращения переворота или опрокидывания самоката 10. На оси или под передней осью переднего колеса 44 могут дополнительно устанавливаться подножки. Кроме того, самокат 10 может быть дополнительно оснащен доской подножки, корзинами, мешками и/или колесами-стабилизаторами. Кроме того, самокат 10 может оснащаться осветительными приборами, например, передними фарами и задними фонарями в качестве средства безопасности или обеспечения эксплуатации в условиях ограниченной видимости.
Во время эксплуатации, движение самоката 10 вперед может обеспечиваться различными способами, включая тот, когда пользователь 16 просто отталкивается назад ногами. Как уже описывалось ранее, движение самоката 10 вперед может обеспечиваться за счет бокового качения переднего колеса 44 в противофазе с боковым качанием опорного узла 24. Энергия, вырабатываемая при таком противофазном движении, обеспечивает движение самоката 10 вперед. Кроме того, движение самоката 10 вперед может обеспечиваться электрическим двигателем 82, сообщающим вращательное движение на, по меньшей мере, одно из передних и/или задних колес 44, 56. Регулировки двигателя 82 осуществляются с помощью дросселя 40, который может быть установлен в узел 32 ручки, как показано на фиг.5. Торможение или остановка самоката 10 могут осуществляться с помощью тормозного механизма, которым можно управлять посредством тормозного рычага 42, который может быть установлен в узле 32 ручки, как показано на фиг.5.
Вышеуказанное описание приведено в качестве примера, а не ограничения. С учетом вышеуказанного раскрытия сущности изобретения специалист в данной области техники мог бы разработать изменения, которые соответствовали бы объему и сущности изобретения. Кроме того, различные признаки вариантов осуществления изобретения, раскрытых выше, могут быть использованы поодиночке или в различных сочетаниях друг с другом и не могут быть ограничены специфическими сочетаниями, описанными выше. Таким образом, объем формулы изобретения не ограничивается проиллюстрированными вариантами осуществления изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОКАТ УНИВЕРСАЛЬНЫЙ | 2000 |
|
RU2203823C2 |
| ВЕЛОМОБИЛЬ-САМОКАТ МАМЫРИНА | 1992 |
|
RU2022864C1 |
| САМОКАТ | 2012 |
|
RU2613651C2 |
| Одноколейный двухколесный автоматизированный скутер и способ его использования | 2018 |
|
RU2702365C1 |
| Прогулочная коляска | 2020 |
|
RU2744777C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С НАКЛОННОЙ РУЛЕВОЙ КОЛОНКОЙ | 2015 |
|
RU2672003C2 |
| КАТЯЩАЯСЯ КАЧАЛКА | 1992 |
|
RU2045310C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| СКЛАДНОЙ САМОКАТ | 2016 |
|
RU2716733C1 |
| КАТЯЩИЙСЯ КАЧАЮЩИЙСЯ МЕХАНИЗМ | 1992 |
|
RU2057567C1 |

Изобретение относится к самокату, совмещенному со скейтбордом. Подножка (26) обеспечивает опору для пользователя в положении стоя. Подножка (26) выполнена с возможностью качания относительно продольной оси (А), проходящей от передней части к задней части. Подножка (26) и переднее колесо соединены не шарнирно относительно вертикальной оси. Подножка (26) имеет левую и правую части, расположенные с левой и правой сторон переднего колеса для обеспечения опоры пользователю в положении стоя так, что переднее колесо самоката находится между левой и правой ногами пользователя. Рулевой узел (32) расположен спереди и проходит вверх. Пара задних колес (56) прикреплена коаксиально сзади с возможностью рыскания относительно продольной оси между нейтральным положением и положением (70) рыскания. Рулевое управление обеспечивается посредством углового рыскания задних колес при несимметричной нагрузке левой и правой частей подножки (26). Решение направлено на уменьшение расстояния между передним и задними колесами для повышения маневренности. 18 з.п. ф-лы, 10 ил.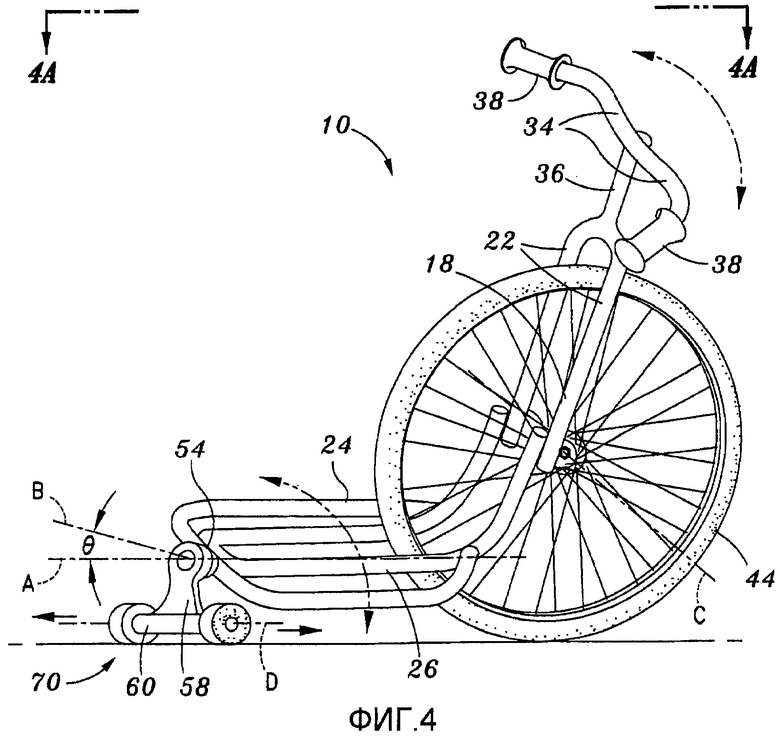
1. Трехколесный самокат, содержащий:
подножку для обеспечения опоры для пользователя в положении стоя на трехколесном самокате, причем подножка выполнена с возможностью качания относительно продольной оси, проходящей от передней части к задней части;
переднее колесо, нешарнирно прикрепленное к подножке, причем левая и правая части подножки расположены с левой и правой сторон переднего колеса для обеспечения опоры пользователю в положении стоя так, что переднее колесо самоката находится между левой и правой ногами пользователя;
рулевой узел, расположенный в передней части и проходящий вверх; и
пару задних колес, коаксиально прикрепленных к задней части с возможностью рыскания относительно продольной оси между нейтральным положением и положением рыскания;
при этом управление самокатом осуществляется посредством углового рыскания задних колес относительно продольной оси.
2. Самокат по п.1, в котором подножка выполнена с возможностью бокового качания, приводя к угловому рысканию задних колес.
3. Самокат по п.1, в котором рулевой узел жестко соединен с подножкой, так что боковое перемещение рулевого узла обеспечивает рыскание задних колес.
4. Самокат по п.1, дополнительно содержащий:
цапфу, включающую в себя заднюю ось и шкворень, проходящий наружу от задней оси, причем шкворень шарнирно соединяет заднюю ось с подножкой;
при этом задние колеса установлены на противоположных концах задней оси; и
шкворень ориентирован так, что поворот задней оси относительно него приводит к рысканию задних колес относительно продольной оси.
5. Самокат по п.4, в котором цапфа выполнена с возможностью рыскания задней оси относительно продольной оси на величину половинного угла, составляющего, по меньшей мере, около 45°.
6. Самокат по п.4, в котором шкворень определяет ось качания, наклонную относительно продольной оси.
7. Самокат по п.6, в котором ось качания ориентирована вниз по направлению из задней части к передней части.
8. Самокат по п.4, дополнительно содержащий смещающий элемент, конструктивно соединенный с цапфой и выполненный с возможностью смещения задней оси в нейтральное положение.
9. Самокат по п.6, в котором подножка включает в себя рулевой узел и снабжена шарнирным соединением, которое соединяет между собой подножку и рулевой узел;
причем шарнирное соединение выполнено с возможностью обеспечения бокового качания подножки относительно рулевого узла.
10. Самокат по п.1, в котором каждое из задних колес независимо подсоединено шарнирно к подножке; и
задние колеса механически соединены друг с другом для обеспечения синхронного углового рыскания.
11. Самокат по п.10, дополнительно содержащий пару шпинделей и перемычку,
при этом каждый из шпинделей выполнен с возможностью шарнирного крепления соответствующего заднего колеса к опорному узлу, а
перемычка выполнена с возможностью механического соединения задних колес.
12. Самокат по п.1, в котором диаметр переднего колеса от шести до десяти раз превышает диаметр заднего колеса.
13. Самокат по п.1, в котором подножка обеспечивает опору стоящему на ней пользователю.
14. Самокат по п.1, дополнительно включающий в себя часть сиденья, проходящую в поперечном направлении наружу и служащую в качестве опоры сидящему на ней пользователю.
15. Самокат по п.14, в котором часть сиденья выполнена с возможностью шарнирного складывания в основном параллельно рулевому узлу.
16. Самокат по п.1, дополнительно содержащий двигатель, приводящий, по меньшей мере, одно из передних и задних колес и выполненный с возможностью придания им вращательного движения для продвижения самоката.
17. Самокат по п.1, дополнительно содержащий систему подвески, конструктивно соединенную с, по меньшей мере, одним из переднего и задних колес, и выполненную с возможностью обеспечения их вертикального отклонения относительно подножки.
18. Самокат по п.1, в котором рулевой узел расположен спереди, проходит наверх от подножки и имеет вертикальный рычажный элемент, за который держится пользователь.
19. Самокат по п.18, в котором рулевой узел дополнительно содержит пару расположенных напротив друг друга боковых рычажных элементов, проходящих наружу из вертикального рычажного элемента, за которые держится пользователь.
| US 2003228961 А1, 11.12.2003 | |||
| СТРОИТЕЛЬНАЯ КОМПОЗИЦИЯ | 2001 |
|
RU2198857C1 |
| WO 2005100139 A1, 27.10.2005 | |||
| US 2005139406 A1, 30.06.2005 | |||
| DE 4424297 A1, 11.01.1996 | |||
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ДВУХКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 2001 |
|
RU2225990C2 |
| US 4359231 A, 16.11.1982 | |||
| US 6572130 B2, 03.06.2003 | |||
| Устройство для холодной сварки корпусных деталей полупроводниковых приборов | 1976 |
|
SU610642A1 |
| US 6942235 B2, 13.09.2005 | |||
| US 5620189 A, 15.04.1997 | |||
| US 5853182 A, 29.12.1998 | |||
| Скейтборд | 1991 |
|
SU1834672A3 |

