Перекрестная ссылка на родственные заявки
Данная заявка испрашивает приоритет и все преимущества по предварительной заявке на патент США № 62/311,962, которая была подана 23 марта 2016 года и которая в полном объеме включена в данную заявку посредством ссылки.
Уровень техники
С ростом численности населения и четко выраженной тенденцией к большей урбанизации увеличивается плотность населения городов. Пользователи все чаще ездят в общественных транспортных системах и переходят со станций общественного транспорта до конечных пунктов назначения. Более того, в настоящее время многие жители пригородных районов паркуют свои автомобили в парковочных сооружениях в центрах города и идут пешком до конечного пункта назначения, чтобы избегать пробок в центрах города.
Краткое описание графических материалов
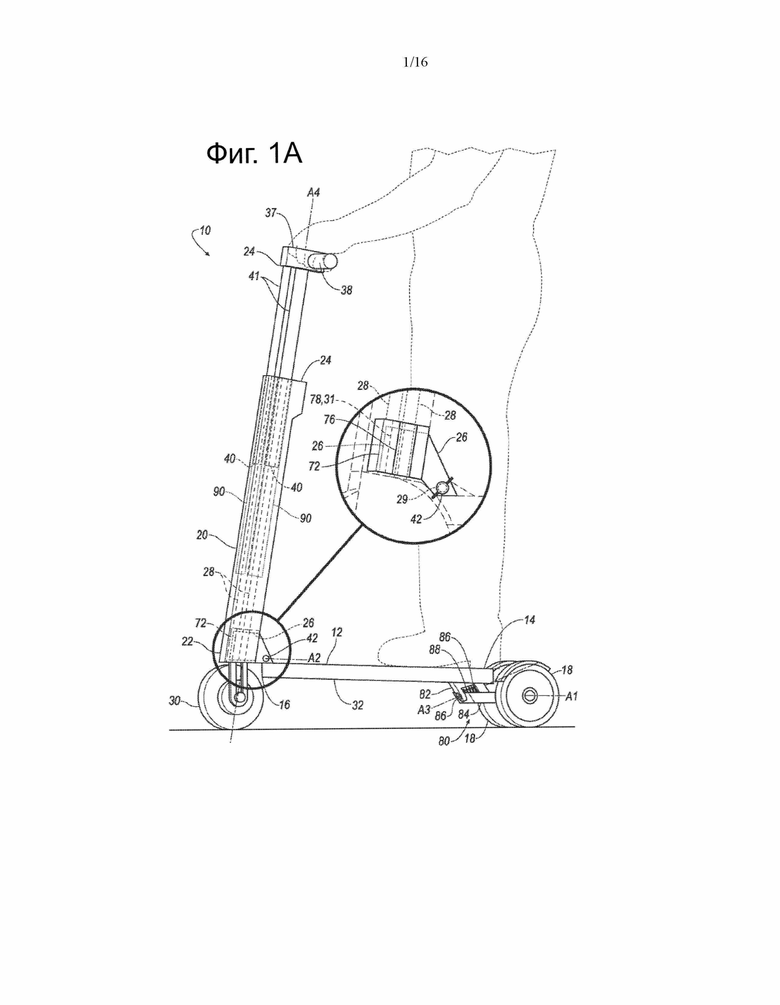
На фиг. 1А проиллюстрирован вид в перспективе приведенного в качестве примера самоката в положении «Ехать».
На фиг. 1В проиллюстрирован вид в перспективе части самоката, проиллюстрированного на фиг. 1А.
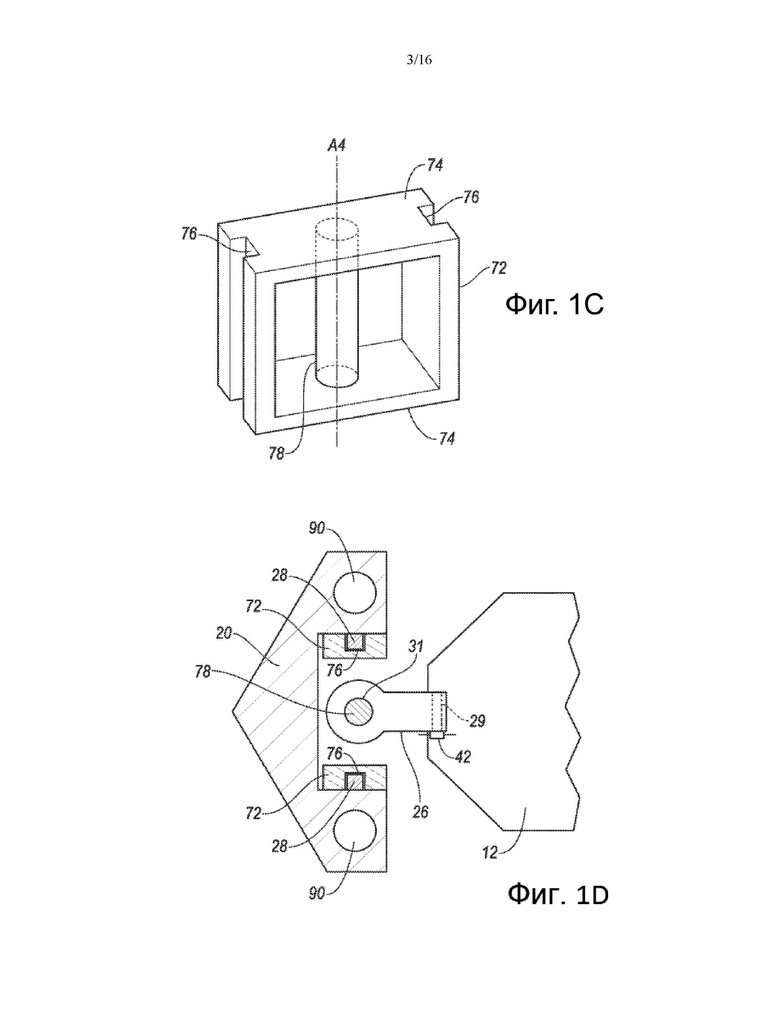
На фиг. 1С проиллюстрирован вид в перспективе каретки самоката, проиллюстрированного на фиг. 1А.
На фиг. 1D проиллюстрировано поперечное сечение передней части корпуса и каретки самоката, проиллюстрированного на фиг. 1А.
На фиг. 1Е проиллюстрирован вид в перспективе части самоката, проиллюстрированного на фиг. 1А, при согласовании кривой.
На фиг. 2А проиллюстрирован вид в перспективе самоката, проиллюстрированного на фиг. 1, в положении «Нести».
На фиг. 2В проиллюстрирован вид сверху самоката, проиллюстрированного на фиг. 2А.
На фиг. 3 проиллюстрирован вид в перспективе самоката, проиллюстрированного на фиг. 1, в режиме «Везти».
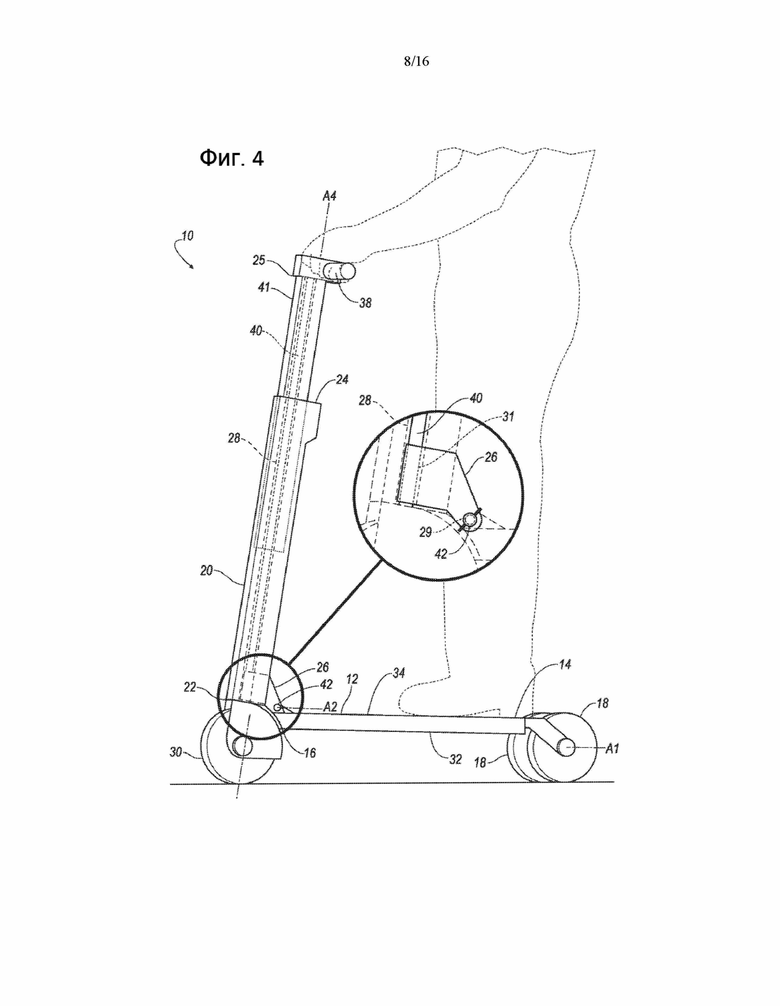
На фиг. 4 проиллюстрирован вид в перспективе еще одного приведенного в качестве примера самоката в положении «Ехать».
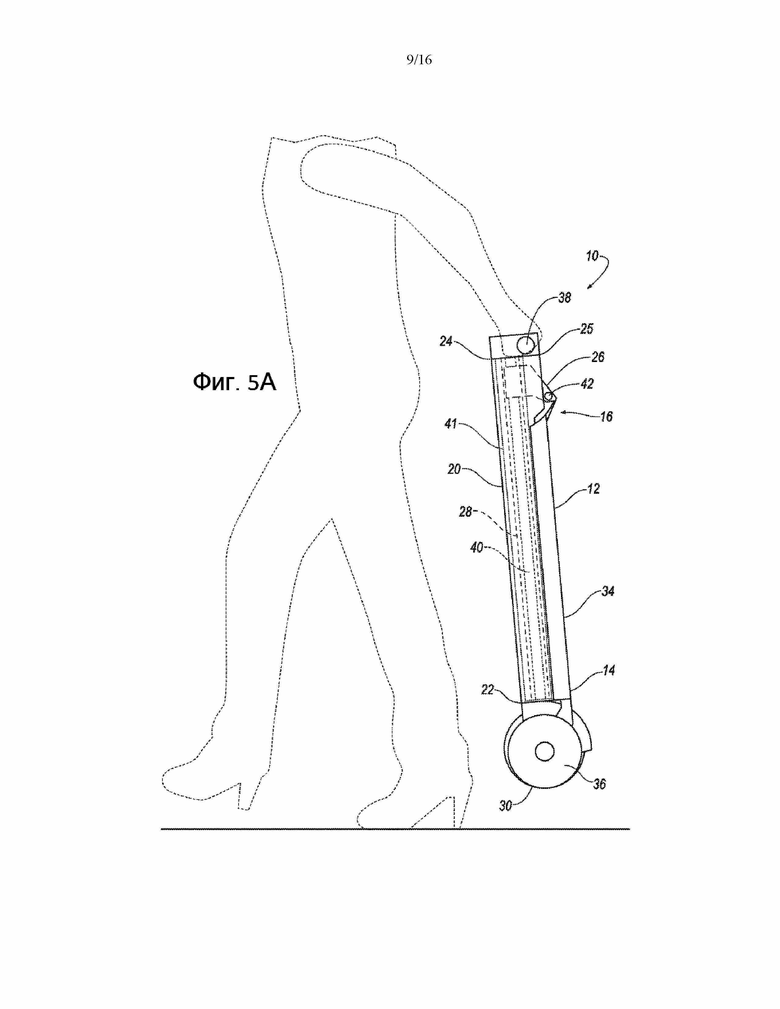
На фиг. 5А проиллюстрирован вид в перспективе самоката, проиллюстрированного на фиг. 4, в положении «Нести».
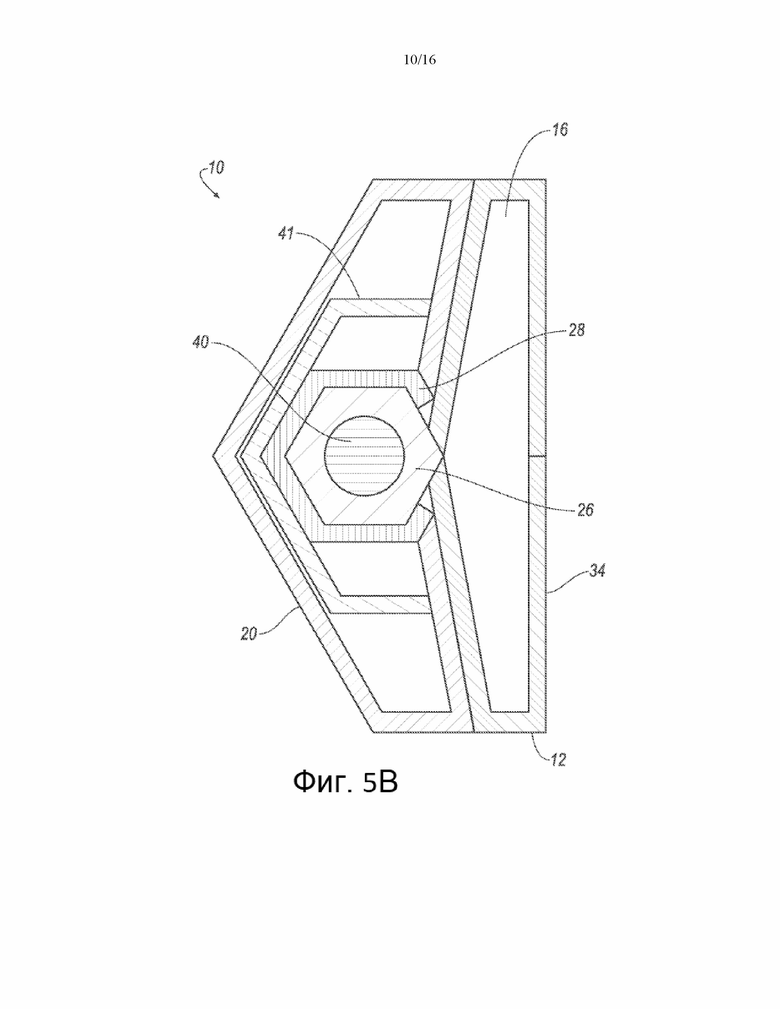
На фиг. 5В проиллюстрирован вид сверху самоката, проиллюстрированного на фиг. 5А.
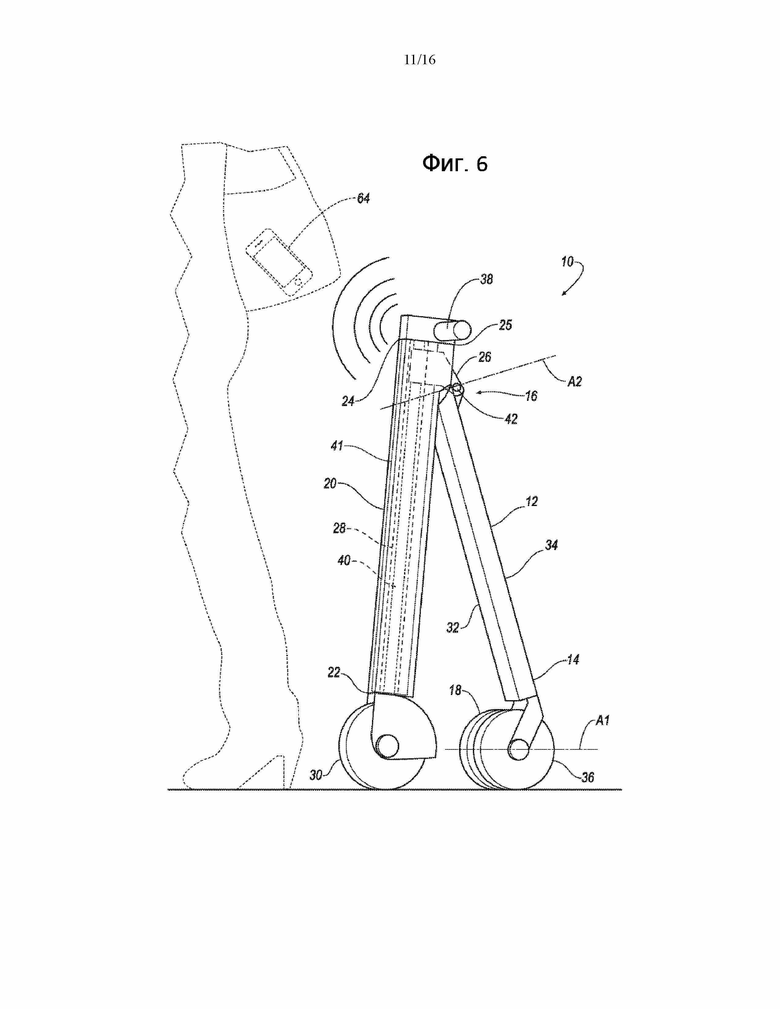
На фиг. 6 проиллюстрирован вид в перспективе самоката, проиллюстрированного на фиг. 4, в режиме «Везти».
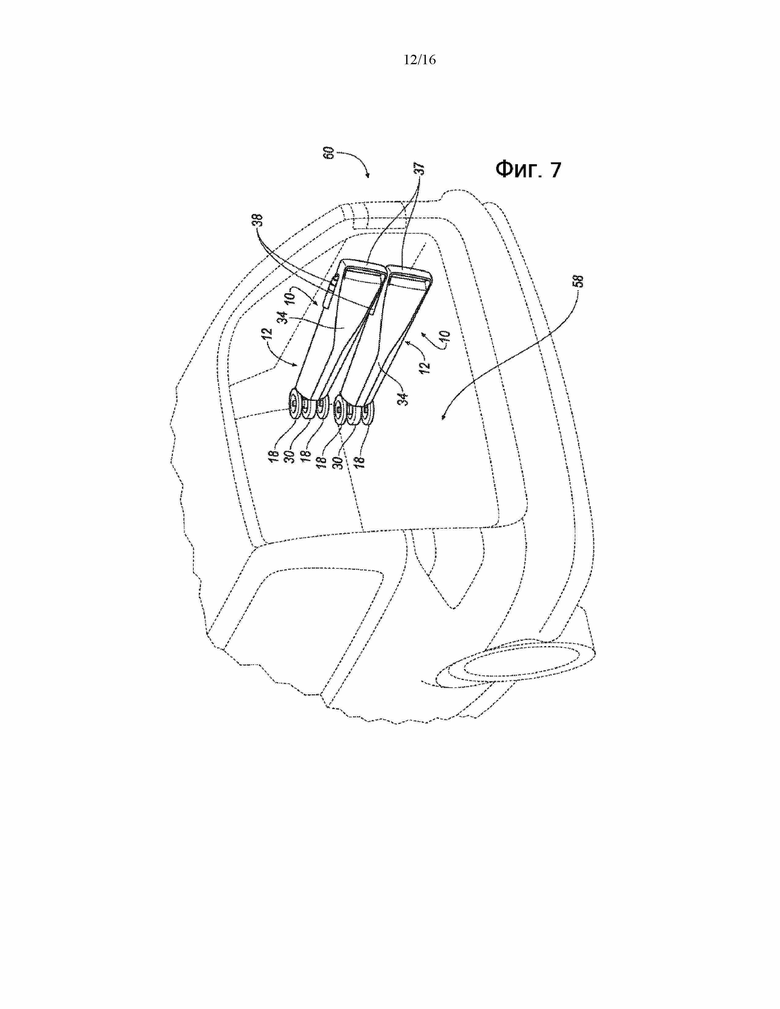
На фиг. 7 проиллюстрирован вид в перспективе самокатов, проиллюстрированных на фиг. 1 и 4, в режиме «Нести» самоката, помещенного в багажник.
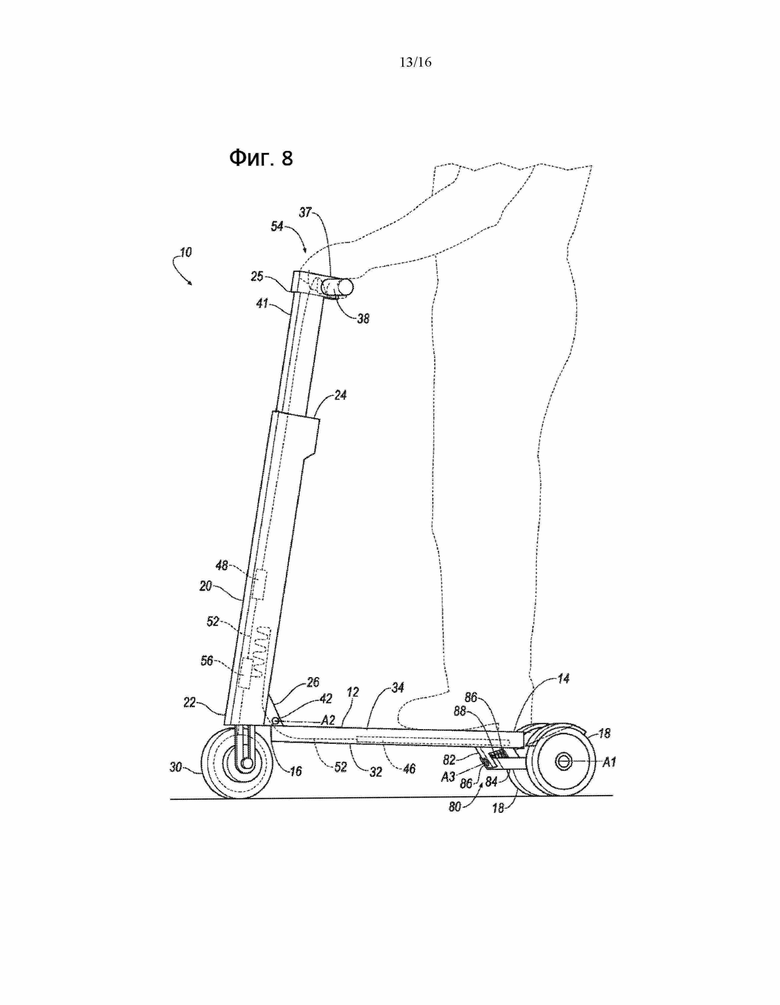
На фиг. 8 проиллюстрирован вид в перспективе самокатов, проиллюстрированных на фиг. 1 и 4, в положении «Ехать», иллюстрирующий различные электрические, электронные и/или управляющие компоненты.
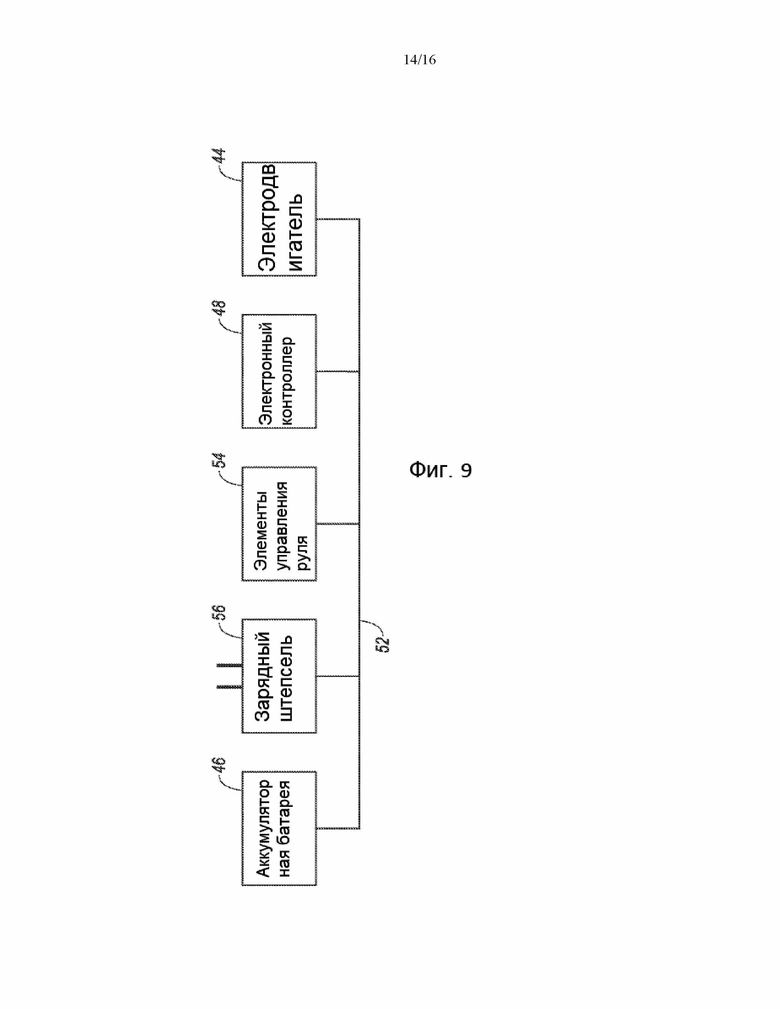
На фиг. 9 проиллюстрирована структурная схема, показывающая подкомпоненты приведенного в качестве примера электронного контроллера, установленного в самокате, проиллюстрированном на фиг. 1 и 4.
На фиг. 10 проиллюстрирована структурная схема, показывающая подкомпоненты приведенного в качестве примера электронного контроллера, установленного в самокате, проиллюстрированном на фиг. 1 и 4.
На фиг. 11 проиллюстрирована блок-схема способа для самокатов, проиллюстрированных на фиг. 1 и 4, в положении «Везти».
Подробное описание сущности изобретения
Введение
Со ссылкой на фигуры, на которых аналогичные номера позиций обозначают аналогичные детали на всех видах, приведенный в качестве примера самокат 10 содержит нижнюю часть корпуса 12 с первым концом 14 и вторым концом 16, заднее колесо 18, поддерживаемое с возможностью вращения первым концом 14, удлиненную переднюю часть корпуса 20 с нижним концом 22 и верхним концом 24, направляющую 28, закрепленную внутри передней части корпуса 20, проходящей от нижнего конца 22 до верхнего конца 24, крепежный элемент 26, прикрепленный с возможностью поворота ко второму концу 16 нижней части корпуса 12 и находящийся в зацеплении с направляющей 28, и переднее колесо 30, поддерживаемое с возможностью вращения нижним концом 22.
Самокат 10 обычно используют для передвижения по поверхности земли, например, по дороге, тротуару, дорожке, автостоянке и т.д. Когда пользователь едет на самокате 10, детали самоката 10 в непосредственности близости от поверхности земли могут загрязняться из-за грязи, неубранного сора и т.п. на поверхности земли. Самокат 10 может быть переведен в положение «Нести», например, путем перемещения крепежного элемента 26 в направлении верхнего конца 24 передней части корпуса 20 и дополнительного перемещения заднего колеса 18 в направлении переднего колеса 30 с вращением нижней части корпуса 12. В положении «Нести» нижняя поверхность 32 нижней части корпуса 12, которая обычно обращена к дороге, когда пользователь едет на самокате 10, окружена передней частью корпуса 20 и верхней поверхностью 34 нижней части корпуса 12. Передняя часть корпуса 20 и верхняя поверхность 34 нижней части корпуса 12 могут загрязняться меньше по сравнению с нижней поверхностью 32. Таким образом, самокат 10 в положении «Нести» может уменьшить вероятность того, что одежда пользователя, удерживающего самокат 10, или человека, стоящего рядом с пользователем, будет запачкана грязью на нижней поверхности 32 нижней части корпуса 12. Кроме того, размещение переднего колеса 30 и заднего колеса 18 смежно друг с другом в положении «Нести» на нижнем конце 22 по сравнению с размещением колес удаленно друг от друга, может уменьшить вероятность попадания на одежду пользователя или человека, находящегося рядом с пользователем, грязи с колес.
Элементы системы
В одном примере, проиллюстрированном на фиг. 1–3, нижняя часть корпуса 12 самоката 10 может иметь нижнюю поверхность 32 и верхнюю поверхность 34. Два задних колеса 18 могут быть установлены с возможностью вращения на первом конце 14 нижней части корпуса 12. Задние колеса 18 могут вращаться на поверхности земли, когда самокат 10 перемещается вперед или назад. Задние колеса 18 могут вращаться вокруг оси A1. Пользователь может стоять на одной или двух ногах на верхней поверхности 34 нижней части корпуса 12. Чтобы избежать соскальзывания стопы пользователя с верхней поверхности 34, верхняя поверхность 34 может содержать канавки, шероховатую поверхность и/или другие материалы или конструкции для увеличения трения между верхней поверхностью 34 и обувью пользователя, тем самым уменьшая риск соскальзывания.
Как проиллюстрировано на фиг. 1, задние колеса 18 могут быть установлены на нижней поверхности 32 нижней части корпуса 12 посредством узла 80 держателя колес. Узел 80 держателя колес может содержать основание 82, установленное на нижнем корпусе 12, например на нижней поверхности 32, вилку 84, соединенную с возможностью поворота с основанием 82 с помощью штифта 86, и пружину 88, например спиральную пружину, поддерживающую ось A1 задних колес 18, параллельную нижней поверхности 32 нижней части корпуса 12. В качестве дополнительного или альтернативного варианта, спиральная пружина 88 может проходить вокруг штифта узла держателя колеса.
Узел 80 держателя колес обычно облегчает контакт обоих задних колес 18 с поверхностью земли, например, когда самокат 10 вписывается в крутой поворот или едет по грубой или неровной поверхности. Такой непрерывный контакт с поверхностью земли может давать пользователю ощущение большего комфорта или устойчивости. Например, когда самокат 10 вписывается в крутой поворот или едет по грубой или неровной поверхности, вилка 84 может поворачиваться вокруг оси A3 относительно основания 82. Ось A3 может быть поперечной по отношению к нижней поверхности нижней части корпуса 12. В качестве альтернативного варианта, ось A3 может быть параллельной нижней поверхности 32 нижней части корпуса 12. Пружина 88 может быть прикреплена к вилке 84 и основанию 82, например, размещена вокруг штифта 86. Пружина 88 может находиться в равновесном состоянии, когда ось A1, по существу, параллельна нижней поверхности 32 нижней части корпуса 12, например, когда первое расстояние D1 от первого заднего колеса 18 до нижней поверхности 32 нижней части корпуса 12 и второе расстояние D2 от второго заднего колеса 18 до нижней поверхности 32 нижней части корпуса 12, по существу, равны. Путем поворота вилки 84 вокруг оси A3 в любом направлении, то есть при том, что пружина находится в напряженном состоянии, когда первое расстояние D1 и второе расстояние D2 неравны, пружина 88 находится в напряженном состоянии. Когда пружина 88 находится в напряженном состоянии, пружина 88 применяет крутящий момент к вилке 88, который соотносится с величиной углового смещения вилки 88 по отношению к основанию 82.
Как проиллюстрировано на фиг. 1А, 1В и 1D, передняя часть корпуса 20 содержит верхний конец 24 и нижний конец 22. На фиг. 1D проиллюстрировано поперечное сечение вдоль плоскости DD, показанной на фиг. 1B. Нижний конец 22 передней части корпуса 20 может поддерживать переднее колесо 30, например, посредством подшипников (не показаны) с использованием известного способа. Переднее колесо 30 может вращаться на поверхности земли, когда самокат 10 перемещается вперед или назад. В качестве дополнительного варианта, руль 38 может быть установлен на верхней части корпуса 37 самоката 10. Верхняя часть корпуса 37 установлена посредством одного или более удлиненных элементов 41 на передней части корпуса 20. Удлиненные элементы 41 телескопически убираются в одно или более отверстий 90 передней части корпуса 20. Следует понимать, что могли бы быть реализованы различные механизмы удерживания и расцепления удлиненного элемента 41 в различных положениях, например на различных высотах, в передней части корпуса 20. Пользователь может удерживать руль 38 во время езды на самокате 10.
Переднее колесо 30 установлено с возможностью вращения на нижнем конце 22 передней части корпуса 20, а передняя часть корпуса 20 может поворачиваться относительно нижней части корпуса 12 вокруг оси A4 поперек нижней части корпуса 12, например верхней поверхности 34. При таком поворачивании пользователь может управлять самокатом 10 в направлении вправо или влево, например, удерживая руль 38 и применяя крутящий момент вокруг оси А4. Передняя часть корпуса 20 может быть соединена с возможностью поворота с нижней частью корпуса 12 посредством салазок линейного перемещения 72 и крепежного элемента 26, как обсуждается ниже.
И далее в соответствии с фиг. 1, самокат 10 содержит направляющую 28, такую как Т-образные пазы или цилиндрические втулки, проходящую вдоль передней части корпуса 20, например, от нижнего конца 22 до верхнего конца 24. Направляющая 28 может быть установлена на или в передней части корпуса 20 и может проходить по меньшей мере частично от нижнего конца 22 передней части корпуса 20 до верхнего конца 24 передней части корпуса 20. Самокат 10 может содержать салазки линейного перемещения 72, находящиеся в зацеплении с возможностью перемещения с направляющей 28.
Салазки линейного перемещения 72 могут иметь полую прямоугольную форму, как лучше всего проиллюстрировано на фиг. 1C, включая два конца 74, стержень 78, расположенный между двумя концами 74, и одну или более канавок 76. Салазки линейного перемещения 72 могут находиться в зацеплении с возможностью скольжения с направляющей 28, например, через канавки 76. Салазки линейного перемещения 72 могут скользить между нижним концом 22 и верхним концом 24 передней части корпуса 20. Салазки линейного перемещения 72 могут быть выполнены из материала TEFLON™ или любого другого подходящего материала. Передняя часть корпуса 20 установлена с возможностью поворота на нижней части корпуса 12 с помощью крепежного элемента 26.
Самокат 10 содержит крепежный элемент 26, расположенный между салазками линейного перемещения 72 и нижней частью корпуса 12. Крепежный элемент 26 может содержать отверстие 29, канал 31 и штифт 42, проходящий через канал 31 и соединяющий с возможностью поворота крепежный элемент 26 с нижней частью корпуса 12. Нижняя часть корпуса 12 может поворачиваться вокруг оси А2 относительно крепежного элемента 26. Канал 31 крепежного элемента 26 может находиться в зацеплении с возможностью поворота со штоком 78 салазок линейного перемещения 72, то есть крепежный элемент 26 поворачивается вокруг штока 78 салазок линейного перемещения 72. Поэтому салазки линейного перемещения 72 могут поворачиваться вокруг оси А4 по отношению к крепежному элементу 26. В качестве дополнительного варианта, оси A2 и A4 могут быть поперечными, например перпендикулярными. Кроме того, крепежный элемент 26 может перемещаться вдоль направляющей 28 посредством скользящих перемещений салазок линейного перемещения 72 вдоль направляющей 28.
Самокат может содержать верхнюю часть 37, соединенную с передней частью корпуса 20 через один или более удлиненных элементов 41. Таким образом, передняя часть корпуса 20 удерживает с возможностью скольжения удлиненные элементы 41. Самокат 10 может содержать один или более рулей 38, прикрепленных к верхней части корпуса 37.
Как упоминалось выше, самокат 10 может переключаться между тремя конфигурациями, иногда называемыми режимами. К ним относятся режим «Ехать», как проиллюстрировано на фиг. 1, режим «Нести», как проиллюстрировано на фиг. 2, и режим «Везти», как проиллюстрировано на фиг. 3.
Как проиллюстрировано на фиг. 1, режим «Ехать» задействует детали самоката, перемещенные в положения, позволяющие ездить на самокате 10. В режиме «Ехать» салазки линейного перемещения 72 и крепежный элемент 26 могут быть смежны с передним колесом 30, то есть располагаться так, чтобы быть в контакте с поверхностью нижнего конца 22 передней части корпуса 20. В качестве альтернативного варианта, «смежный» означает положение на конце направляющей 28 ближе всего к нижнему концу 22 передней части корпуса 20, если конец направляющей 28 не граничит с нижним концом 22 переднего конца 20. Пользователь может ездить на самокате 10 и управлять самокатом на поверхности земли в режиме «Ехать» с помощью руля 38.
Как проиллюстрировано на фиг. 2A–2B, пользователь может нести самокат 10 в режиме «Нести». В режиме «Нести» заднее колесо (колеса) 18 расположено близко к переднему колесу 30, например, зазор между передним колесом 30 и каждым из задних колес 18 составляет менее 10 см. В режиме «Нести» крепежный элемент 26 и салазки линейного перемещения 72 смежны с верхним концом 24 передней части корпуса 20, то есть крепежный элемент 26 и салазки линейного перемещения 72 расположены так, чтобы быть в контакте с поверхностью верхнего конца 24 передней части корпуса 20. Кроме того, в режиме «Нести» верхняя часть корпуса 37 может касаться верхнего конца 24 передней части корпуса 20 или располагаться в пределах нескольких миллиметров, например 5 мм, от верхнего конца 24 передней части корпуса 20, а удлиненные элементы 41 убираются внутри передней части корпуса 20. Кроме того, рули 38 могут быть сложены вниз, например, касаясь передней части корпуса 20. В режиме «Нести» пользователь может держать руль 38 для переноса самоката 10. В качестве альтернативного варианта, пользователь может держать переднюю часть корпуса 20 при переносе самоката 10 в горизонтальном направлении. Когда самокат 10 имеет два задних колеса 18, переднее колесо 30 может быть расположено между двумя задними колесами 18, когда самокат 10 находится в режиме «Нести». Кроме того, чтобы уменьшить вес и/или повысить комфорт пользователя при переносе самоката 10, самокат 10 может быть выполнен из материала углеродного волокна или любого другого подходящего легкого материала.
Как проиллюстрировано на фиг. 3, когда пользователь не ездит на самокате 10 и не несет самокат 10, самокат 10 может быть переведен в режим «Везти». Как обсуждается ниже со ссылкой на фиг. 8–11, самокат 10 может содержать электродвигатель 44. Такой двигатель 44 или тому подобное позволяет перемещать самокат 10 по поверхности земли, например, в режиме «Везти». В режиме «Везти» детали самоката 10 перемещаются в такое положение, что крепежный элемент 26 и салазки линейного перемещения 72 удалены от переднего колеса 30 таким образом, что они, по существу, граничат с верхним концом 24 передней части корпуса 20. В режиме «Везти» нижняя поверхность 32 может, по существу, быть обращена к передней части корпуса 20. В качестве дополнительного варианта, в режиме «Везти» верхняя часть корпуса 37 может быть смежной с верхним концом 24 передней части корпуса 20, а удлиненные элементы 41 убираются в передней части корпуса 20. Режим «Везти» может выгодно уменьшить объем пространства, занимаемого самокатом 10, что может быть полезным в переполненной зоне ходьбы.
На фиг. 4 проиллюстрирован еще один пример самоката 10’, в котором одинаковые элементы имеют одинаковые позиции и к которому относится приведенное выше объяснение. Вариации элементов, рассмотренных выше, обозначаются символом со «штрихом», например, самокат 10’. Самокат 10’ в некоторых отношениях отличается от самоката 10. Например, чтобы управлять самокатом 10, передняя часть корпуса 20 поворачивается по отношению к нижней части корпуса 12, в то время как переднее колесо 30 установлено с возможностью вращения на передней части корпуса 20. Однако в самокате 10’ на фиг. 4 рулевая колонка 40 установлена с возможностью вращения в передней части корпуса 20 и установлена на переднем колесе 30, то есть переднее колесо 30 может поворачиваться по отношению к передней части корпуса 30. В качестве дополнительного варианта, в самокате 10 салазки линейного перемещения 72 расположены между крепежным элементом 26 и направляющей 28. Салазки линейного перемещения 72 перемещаются вдоль направляющей 28, в то время как крепежный элемент 26 прикреплен с возможностью поворота к штоку 78 салазок линейного перемещения 72. Однако в самокате 10’ направляющая 28 определяет внутреннюю камеру для удерживания крепежного элемента 26, в то время как крепежный элемент 26 может скользить вдоль направляющей 28.
Как проиллюстрировано на фиг. 4–6, нижняя часть корпуса 12 самоката 10’ может содержать нижнюю поверхность 32 и верхнюю поверхность 34. Одно или более задних колес 18 могут быть установлены с возможностью вращения, например, посредством подшипников, на первом конце 14 нижней части корпуса 12. Задние колеса 18 могут вращаться на поверхности земли, когда самокат 10’ перемещается вперед или назад. Задние колеса 18 могут вращаться вокруг оси A1. Пользователь может стоять на одной или двух ногах на верхней поверхности 34 нижней части корпуса 12. Чтобы избежать соскальзывания ноги пользователя с верхней поверхности 34, верхняя поверхность 34 может содержать канавки, шероховатую поверхность и/или другие материалы или конструкции для увеличения трения между верхней поверхностью 34 и обувью пользователя, тем самым уменьшая риск соскальзывания. Кроме того, самокат 10’ может содержать демпферы, соединяющие задние колеса с нижней частью корпуса 12. Демпферы могут уменьшить скачки для пользователя, когда пользователь преодолевает неровности поверхности земли, например, выбоины.
Как проиллюстрировано на фиг. 4, передняя часть корпуса 20 содержит верхний конец 24 и нижний конец 22. Самокат 10’ может содержать руль 38, установленный посредством удлиненного элемента 41 на передней части корпуса 20. Удлиненный элемент 41 телескопически убирается в переднюю часть корпуса 20. Переднее колесо 30 может быть установлено с возможностью вращения на нижнем конце 22 передней части корпуса 20, а переднее колесо 30 может поворачиваться вокруг оси А4 относительно передней части корпуса 20. Другими словами, в этом примере, обсужденном ниже, самокат 10’ может направляться вправо или влево, поворачивая переднее колесо 30 вокруг оси A4 относительно передней части корпуса 20.
Как проиллюстрировано на фиг. 4, самокат 10’ содержит рулевую колонку 40. Рулевая колонка 40 может проходить от верхнего конца 24 до нижнего конца 22 передней части корпуса 20. Рулевая колонка 40 может проходить вниз от руля 38 внутри передней части корпуса 20, что позволяет рулевой колонке 40 вращаться по отношению к передней части корпуса 20. Чтобы рулевая колонка 40 могла телескопически убираться в переднюю часть корпуса 20 вместе с направляющей 28 и удлиненным элементом 41, рулевая колонка 40 может иметь две подсекции, причем одна подсекция входит путем скольжения в другую подсекцию. Затем рулевая колонка 40 прикреплена с возможностью поворота к переднему колесу 30 на одном конце одной подсекции и соединена с рулем 38 на одном конце другой подсекции. Рулевая колонка 40 позволяет пользователю управлять самокатом 10’ в разных направлениях с помощью руля 38. Рулевая колонка 40 может быть установлена на передней части корпуса 20 с помощью втулки, подшипника или любой другой конструкции, которая обеспечивает вращательное перемещение рулевой колонки 40 относительно передней части корпуса 20; причем конкретная приведенная в качестве примера конфигурация крепежного элемента 26 и направляющей 28, удерживающей рулевую колонку 40 на месте, описана более подробно ниже.
Рулевая колонка 40 может находиться в выдвинутом положении, когда пользователь едет на самокате 10’, или в убранном положении. Кроме того, высота рулевой колонки 40 может регулироваться в разных выдвинутых положениях для размещения пользователей разного роста, то есть длина участка подсекции, выдвигающегося путем скольжения из другого подсекции, может регулироваться, например, с помощью механизма быстрого разъединения.
Самокат 10’ содержит направляющую 28, которая может быть закрыта удлиненным элементом 41 и может дополнительно иметь внутреннюю форму, предусмотренную для плотного размещения крепежного элемента 26. Направляющая 28 может быть установлена на или в передней части корпуса 20, может проходить по меньшей мере частично от нижнего конца 22 передней части корпуса 20 до верхнего конца 24 передней части корпуса 20. Как было только что упомянуто, направляющая 28 определяет внутреннюю камеру, чтобы удерживать с возможностью скольжения крепежный элемент 26, причем направляющая 28 имеет верхний конец, который примыкает к рулю 38, и находится вблизи или, по существу, в области верхнего конца 24 передней части корпуса 20, когда удлиненный элемент 41 находится в убранном положении (фиг. 5 и 6), и нижнего конца направляющей 28.
Крепежный элемент 26 имеет канал 31, имеющий, по существу, круглое поперечное сечение для зацепления с рулевой колонкой 40. Крепежный элемент 26, имеющий канал 31, может проходить в продольном направлении внутри направляющей 28 на относительно небольшом участке, например, на одну десятую или менее, длины направляющей 28, например, всего лишь на несколько сантиметров, и может скользить в продольном направлении внутри направляющей. То есть рулевая колонка 40 проходит через канал 31 крепежного элемента 26. Крепежный элемент 26 может иметь шестиугольное поперечное сечение. В качестве альтернативного варианта, могут использоваться другие формы поперечного сечения для крепежного элемента 26, например, круглая или эллиптическая.
Рулевая колонка 40 может вращаться относительно крепежного элемента 26 и направляющей 28. Чтобы сделать управление самокатом 10’ более удобным для пользователя, трение между рулевой колонкой 40 и внутренней поверхностью канал 31 крепежного элемента 26 может быть уменьшено, например, с помощью антифрикционных поверхностей, таких как известные антифрикционные поверхности, например, такие как TEFLON™, смазывающие вещества или другие материалы, которые, как известно, уменьшают трение и/или обеспечивают смазку.
Крепежный элемент 26 может быть прикреплен ко второму (или переднему) концу 16 нижней части корпуса 12 штифтом 42, закрепленным, по существу, в круглом отверстии 29 крепежного элемента 26, посредством чего крепежный элемент 26 прикреплен с возможностью поворота ко второму концу 16 нижней части корпуса 12. Крепежный элемент 26 может скользить внутри внутренней поверхности направляющей 28, то есть крепежный элемент 26 может скользить вдоль продольной оси направляющей 28. Таким образом, нижняя часть корпуса 12 может быть сложена в положение, смежное или по, существу, граничащее с передней частью корпуса 20, то есть нижняя поверхность 32 нижней части корпуса 12 расположена между верхней поверхностью 34 нижней части корпуса 12 и передней частью корпуса 20. Это может быть полезно для облегчения переноса самоката 10’, когда самокат 10’ не используется для езды. Чтобы обеспечить скольжение крепежного элемента 26 внутри направляющей 28 тем образом, который удобен для пользователя, то есть более плавно, может быть уменьшено трение между направляющей 28 и крепежным элементом 26, например, за счет таких покрытий, как TEFLONTM, на направляющей 28 и/или крепежном элементе 26. Крепежный элемент 26 может быть соединен со вторым концом 16 нижней части корпуса 12 с помощью штифта 42, а нижняя часть корпуса 12 может поворачиваться вокруг оси А2.
Самокат 10’ может переключаться между различными конфигурациями, иногда называемыми режимами. К ним относятся режим «Ехать», как проиллюстрировано на фиг. 4, режим «Нести», как проиллюстрировано на фиг. 5, и режим «Везти», как проиллюстрировано на фиг. 6.
Как проиллюстрировано на фиг. 4, нижняя поверхность 32 нижней части корпуса 12 обращена от верхнего конца 24, когда самокат 10’ находится в режиме «Ехать», или, другими словами, когда пользователь едет на самокате 10’ по поверхности земли в режиме «Ехать», нижняя поверхность 32 обращена к поверхности земли. В режиме «Ехать» крепежный элемент 26 может быть смежным с передним колесом 30.
Как проиллюстрировано на фиг. 5, в режиме «Нести» заднее колесо (колеса) 18 расположено близко или, по существу, примыкает к переднему колесу 30, например, зазор между передним колесом 30 и каждым из задних колес 18 составляет менее 10 см, а крепежный элемент 26 расположен смежно с верхним концом 24, то есть крепежный элемент расположен на верхнем конце 24 передней части корпуса 20. Пользователь может держать руль 38 при переносе самоката 10’. В качестве альтернативного варианта, пользователь может держать переднюю часть корпуса 20 при переносе самоката 10’ в горизонтальном направлении. В качестве дополнительного варианта, в режиме «Ехать» удлиненный элемент 41 или его участок может перемещаться путем скольжения в переднюю часть корпуса 20 и может быть расположен в передней части корпуса 20, чтобы поддерживать механическую целостность между передней частью корпуса 20 и удлиненным элементом 41. Когда самокат 10’ имеет два задних колеса 18, в режиме «Нести» переднее колесо 30 может быть расположено между двумя задними колесами 18.
Как проиллюстрировано на фиг. 6, в режиме «Везти» нижняя поверхность 32 может, по существу, опираться на переднюю часть корпуса 20. Режим «Везти» преимущественно может уменьшить объем пространства, занимаемого самокатом 10’, что может быть полезным в переполненной пешеходной зоне. Крепежный элемент 26 скользит вверх внутри направляющей 28 от переднего колеса 30. Удлиненный элемент 41 может частично или полностью входить путем скольжения в переднюю часть корпуса 20, когда самокат находится в режиме «Нести».
Как упоминалось выше, в режиме «Везти» самокат 10’ может приводиться в действие, например, с помощью электродвигателя 44 (Как обсуждается ниже со ссылкой на фиг. 8–11, самокат 10’ может содержать электродвигатель 44. Такой двигатель 44 или подобный ему позволяет самокату 10’ перемещаться по поверхности земли.) В режиме «Везти» детали самоката 10’ перемещаются в такое положение, что крепежный элемент 26 удален от переднего колеса 30.
Дальнейшие характерные признаки самоката 10 обсуждаются дальше в отношении фиг. 7–11. Следует отметить, что эти характерные признаки также могут быть реализованы применительно к другим примерам, таким как приведенный в качестве примера самокат 10’, рассмотренный в отношении фиг. 4–6, и т.д.
Как проиллюстрировано на фиг. 7, приведенный в качестве примера самокат 10 в соответствии с фиг. 1 или 4 может быть размещен в багажнике транспортного средства. Чтобы сэкономить место при хранении в багажнике 58, руль 38 может быть сложен вниз для расположения смежно с передней частью корпуса 20, то есть может касаться передней части корпуса 20, а удлиненный элемент (элементы) 41 может быть убран в передней части корпуса 20. Как рассмотрено ниже, самоходный самокат 10 может заряжаться при хранении в багажнике 58 транспортного средства 60.
Как проиллюстрировано на фиг. 8, приведенный в качестве примера самокат 10, например, в соответствии с фиг. 1 или 4, может быть самоходным, то есть, приводиться в движение за счет двигателя 44 или привода, содержащегося в самокате 10, вместо того, чтобы приводиться в движение пользователем, который толкает самокат 10. Например, электродвигатель 44 может быть встроенным в колесо электродвигателем, установленным внутри переднего колеса 30 самоката 10 и подключенным с возможностью управления к переднему колесу 30. В качестве альтернативного или дополнительного варианта, электродвигатель 44 может быть обычным электродвигателем, установленным на передней части корпуса 20 и подключенным к переднему колесу 30. Энергия, требуемая для работы электродвигателя 44, может быть обеспечена аккумуляторной батареей 46, установленной на нижней части корпуса 12 самоката 10 или в другом месте самоката 10. В качестве альтернативного или дополнительного варианта, могут использоваться другие источники электрической энергии, например солнечные батареи, установленные на самокате 10, внешняя аккумуляторная батарея, переносимая пользователем и электрически соединенная с самокатом 10 или любой другой способ.
На фиг. 8 проиллюстрированы различные электрические, электронные и/или управляющие компоненты самоката 10, и для простоты иллюстрации отсутствуют некоторые элементы, такие как салазки линейного перемещения 72 и крепежный элемент 26. Как проиллюстрировано на фиг. 9 и 10, самокат 10 может иметь электронный контроллер 48, установленный на передней части корпуса 20 или в другом месте, имеющий процессор 66 и память, причем память сохраняет команды, выполняемые процессором 66, для регулирования скорости, ускорения и/или замедления самоката 10. Самокат 10 может содержать элементы управления 54 руля, например, установленные на руле 38, чтобы позволить пользователю вводить входные параметры в электронный контроллер 48 для ускорения или замедления движения самоката 10. Электронный контроллер 48 может содержать блок 50 управления двигателем для управления скоростью электрического двигателя 44, например, блок широтно-импульсной модуляции. Электрический пучок 52, содержащий множество проводов, может соединять между собой аккумуляторную батарею 46, электродвигатель 44, электронный контроллер 48 и элементы управления 54 руля. Кроме того, самокат 10 может содержать зарядный штепсель 56, электрически соединенный с электрическим пучком 52. Зарядный штепсель 56 может обеспечить возможность зарядки аккумуляторной батареи 46 самоката 10, например, в то время как самокат 10 находится в багажнике 58 транспортного средства 60 (как проиллюстрировано на фиг. 7). Электронный контроллер 48 может содержать блок 62 зарядки аккумуляторной батареи для управления потоком электрической энергии, необходимой для зарядки аккумуляторной батареи 46. Процессор 66 электронного контроллера 48 может быть запрограммирован на управление зарядкой аккумуляторной батареи 46, когда самокат 10 подключен через зарядный штепсель 56 к источнику питания, например, аккумулятору транспортного средства.
Во избежание столкновения самоката 10 с каким-либо объектом на дороге возможность быстрого замедления является преимуществом. Электронный контроллер 48 может быть запрограммирован на работу электродвигателя 44 в генераторном режиме, когда пользователь дает запрос на быстрое замедление. Электродвигатель 44 в генераторном режиме противодействует вращению ротора электродвигателя 44 и тем самым может замедлять движение самоката 10. Дополнительное преимущество состоит в том, что аккумуляторную батарею 46 можно заряжать во время замедления. Например, блок 62 зарядки аккумуляторной батареи и программа электронного контроллера 48 могут обеспечивать поток энергии для подзарядки аккумуляторной батареи 46. Известно такое регенеративное торможение, например, для поддержки гибридной операции, известной по эксплуатации гибридных транспортных средств. В качестве дополнительного или альтернативного варианта, самокат 10 может приводить в действие один или более тормозов электрическим способом с помощью элементов управления 54 руля. В качестве альтернативного варианта, тормоза могут быть механически соединены с рулем 38 с использованием провода, передающего усилие от пользователя на тормоз.
Как изложено выше, самокат 10 в режиме «Везти» может перемещаться по поверхности земли рядом с пользователем, впереди или позади пользователя, без надобности в том, чтобы пользователь ехал на самокате 10 или толкал либо тянул самокат. Пользователь может переносить мобильное вычислительное устройство 64 с первым датчиком позиционирования, например, датчиком глобального позиционирования, определяющим глобальную координату мобильного вычислительного устройства 64, и самокат 10 со вторым датчиком позиционирования, например, датчиком глобального позиционирования или датчиком местоположения, определяющим координату самоката 10 относительно мобильного вычислительного устройства 64, схемой 68 беспроводной связи, например, Bluetooth, и процессором 66, запрограммированным на выполнение следующего способа, как проиллюстрировано на фиг. 11. Другими словами, мобильное вычислительное устройство 64 пользовательского устройства может связываться с электронным контроллером 48 самоката для приведения в действие двигателя 44 самоката, чтобы обеспечить перемещение самоката 10 рядом с пользователем, сзади или спереди пользователя.
Приведенная в качестве примера последовательность этапов способа
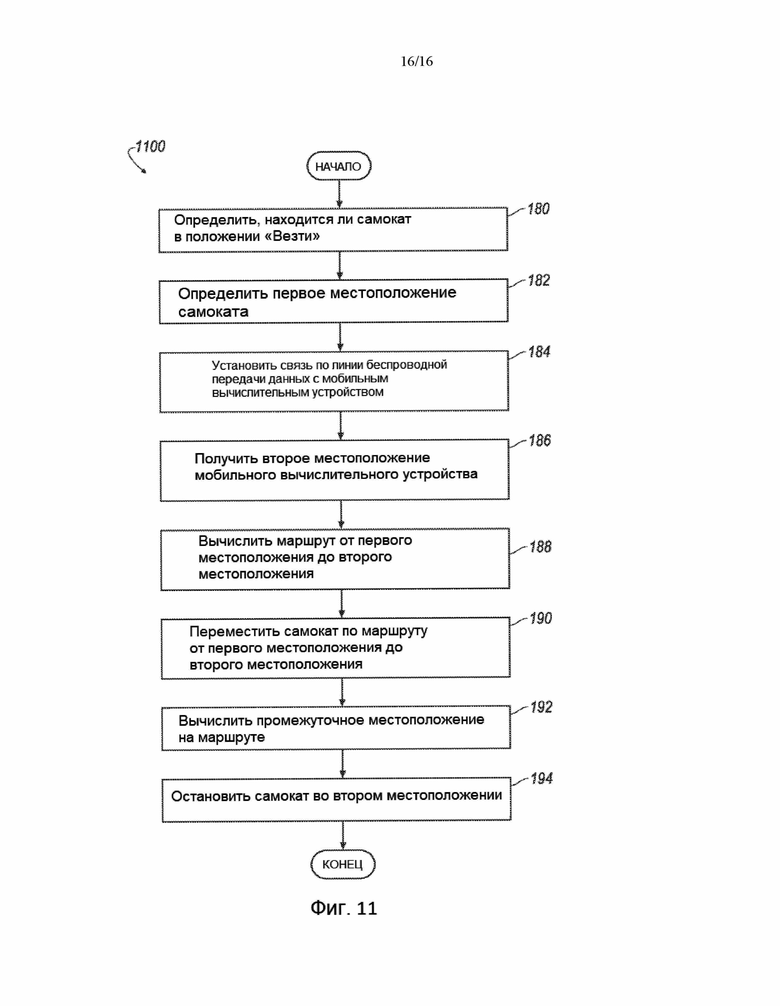
Способ 1100, проиллюстрированный на фиг. 11, включает этапы для определения того, находится ли самокат в режиме «Везти», получения первого местоположения (например, геолокация с использованием координат широты и долготы, как известно) самоката 10, установления связи по линии беспроводной передачи данных с мобильным вычислительным устройством 64, получения второго местоположения мобильного вычислительного устройства 64, вычисления маршрута от первого местоположения ко второму местоположению и перемещения самоката 10 по маршруту от первого местоположения ко второму местоположению. Для управления перемещением самоката 10 по маршруту электронный блок управления может реализовывать различные способы управления, например, пропорциональное интегральное дифференциальное регулирование, каскадное управление, управление средствами нечеткой логики или любой другой подходящий способ управления. Для перемещения самоката 10 по маршруту может потребоваться блок управления для приведения в действие рулевого управления самокатом, чтобы обеспечить прохождение самокатом 10 пешеходного маршрута пользователя, например, чтобы следовать изменению направления пользователем. Самокат 10 может соответственно содержать шаговый двигатель (не проиллюстрирован) или любой другой подходящий механизм, соединенный с электронным контроллером 48 через электрический пучок 52 для управления рулевой колонкой 40 на основании запроса, полученного от процессора 66, для изменения направления перемещения самоката 10.
Пользователь может предпочесть вариант, в котором самокат 10 в режиме «Везти» перемещается впереди пользователя по различным причинам, например, по соображениям безопасности. В этом случае процессор 66 может быть запрограммирован на получение навигационной информации от мобильного вычислительного устройства 64 и на получение команд от мобильного вычислительного устройства 64 для ускорения, замедления и направления к заранее определенному пункту назначения.
Самокат 10 в режиме «Везти», перемещающийся позади пользователя, может в качестве дополнительного или альтернативного варианта содержать второй датчик местоположения, который представляет собой камеру, установленную на передней части корпуса 20 самоката 10, соединенную через электрический пучок 52 с электронным контроллером 48. Либо второй процессор в камере, либо процессор 66 в электронном контроллере 48 может быть запрограммирован на обнаружение пользователя и вычисление местоположения, например, геокоординат, таких как известно, самоката 10 относительно пользователя. Обнаружение пользователя может выполняться с использованием определенной графической схемы, такой как QR-код на одежде или аксессуарах пользователя, или любой другой характеристики, которая позволяет камере отличать пользователя от других людей вокруг самоката 10.
Способ 1100, как проиллюстрировано на фиг. 11, предназначен для эксплуатации самоката 10 в режиме «Везти». Например, процессор 66 может быть запрограммирован в соответствии со способом 1100.
Выполнение способа 1100 начинается с блока 180, в котором процессор 66 определяет, находится ли самокат 10 в режиме «Везти».
Затем в блоке 182 процессор 66 определяет первое местоположение самоката 10.
Затем в блоке 184 процессор 66 устанавливает связь по линии беспроводной передачи данных с мобильным вычислительным устройством 64.
Затем в блоке 186 процессор 66 получает данные о втором местоположении мобильного вычислительного устройства 64.
Затем в блоке 188 процессор 66 вычисляет маршрут от первого местоположения ко второму местоположению.
Затем в блоке 190 процессор 66 посылает сигнал в блок 50 управления двигателем, например импульс с широтно-импульсной модуляцией с коэффициентом заполнения импульсов 50%, для перемещения самоката 10 по маршруту от первого местоположения до второго местоположения.
В качестве еще одного примера, процессор 66 может быть дополнительно запрограммирован на реализацию блоков 192 и 194, чтобы избежать столкновения между самокатом 10 и пользователем при его следовании за пользователем.
Затем в блоке 192 процессор 66 вычисляет промежуточное местоположение на маршруте, расстояние от которого до второго местоположения по меньшей мере равно минимальному пороговому значению приближения, например, 1 метр.
Затем в блоке 194 процессор 66 отправляет запрос на торможение, например, импульс «ВКЛ», когда самокат 10 достигает заранее определенного минимального приближения, то есть порогового значения промежуточного расстояния. Самокат 10 может перемещаться снова после того, как пользователь идет вперед, а расстояние между самокатом 10 и пользователем превышает заранее определенное минимальное расстояние. После блока 194 выполнение способа 1100 заканчивается.
Вычислительные устройства, такие как устройства, рассматриваемые в данной заявке, как правило, содержат команды, выполняемые одним или более вычислительными устройствами, такими как определенные выше, для реализации блоков или этапов способов, описанных выше. Например, рассмотренные выше блоки способа могут быть реализованы в виде выполняемых компьютером команд.
Выполняемые компьютером команды могут быть скомпилированы или интерпретированы на основании компьютерных программ, созданных с использованием различных языков и/или технологий программирования, включая, без ограничений, и либо отдельно, либо в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем, процессор (например, микропроцессор) получает команды, например, из памяти, машиночитаемого носителя и т.д., и выполняет эти команды, выполняя таким образом один или более способов, включая один или более способов, описанных в данном описании. Такие команды и другие данные могут храниться в файлах и передаваться с использованием различных машиночитаемых носителей. Файл в вычислительном устройстве обычно представляет собой набор данных, хранящихся на машиночитаемом носителе, таком как носитель данных, оперативное запоминающее устройство и т.д.
Машиночитаемый носитель включает любой носитель, который участвует в предоставлении данных (например, команд), которые могут считываться компьютером. Такой носитель может принимать различные формы, включая, но, не ограничиваясь ими, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают, например, оптические или магнитные диски и другую постоянную память. Энергозависимые носители включают динамическое оперативное запоминающее устройство (DRAM), которое обычно составляет основную память. Обычные формы машиночитаемых носителей включают, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель с шаблонами отверстий, ОЗУ, ППЗУ, стираемое ППЗУ, флэш-ППЗУ, любую другую микросхему или картридж памяти или любой другой носитель, с которого может считывать компьютер.
Все термины, используемые в формуле изобретения, предназначены для передачи их простых и обычных значений, понятных специалистам в данной области техники, если в данной заявке явно не указано иное. В частности, использование особых терминов, обозначающих единственное число, определенный объект, например «указанный» и т.д., следует воспринимать как обозначающие один или более указанных элементов, если в заявке не приведено явное ограничение противоположного.
Термин «приведенный в качестве примера» используется в данной заявке для обозначения примера, например, ссылку на «приведенный в качестве примера графический элемент» следует истолковывать как просто указывающую на пример графического элемента.
Наречие «приблизительно»/«примерно», изменяющее значение или результат, означает, что форма, структура, измерение, значение, определение, расчет и т.д. могут отличаться от точной описанной геометрии, расстояния, измерения, значения, определения, расчета и т.д. из-за недостатков материалов, обработки, изготовления, измерения датчиков, вычисления, времени обработки, времени связи и т.д.
В графических материалах одинаковые ссылочные позиции обозначают одинаковые элементы. Кроме того, некоторые или все из этих элементов могли бы быть изменены. Что касается носителей, процессов, систем, способов и т.д., описанных в данной заявке, следует понимать, что, хотя этапы таких способов и т.д. описаны как происходящие в соответствии с определенной упорядоченной последовательностью, такие способы можно реализовать с помощью описанных этапов, выполненных в другом порядке, чем тот, что описан в данной заявке. Следует также понимать, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы или что некоторые этапы, описанные в данной заявке, могли бы быть опущены. Другими словами, описание способов в данной заявке приведено с целью иллюстрации некоторых вариантов реализации изобретения и никоим образом не должно истолковываться таким образом, чтобы ограничивать заявленное изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКОЛЕСНЫЙ САМОКАТ С ЗАДНИМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2008 |
|
RU2470820C2 |
| СКЛАДНОЙ САМОКАТ | 2021 |
|
RU2763380C1 |
| Самокат (варианты) | 2017 |
|
RU2658059C1 |
| САМОКАТ С ПЕДАЛЬНЫМ ПРИВОДОМ | 2011 |
|
RU2529587C1 |
| САМОКАТ | 2012 |
|
RU2520634C1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| РАМНЫЙ КОМПОНЕНТ ВЕЛОСИПЕДА, РАМА ВЕЛОСИПЕДА И ВЕЛОСИПЕД | 2015 |
|
RU2671461C2 |
| СВЕРХЛЕГКИЙ СКЛАДНОЙ ТРЕХКОЛЕСНЫЙ САМОКАТ С ЭЛЕКТРОДВИГАТЕЛЕМ | 2011 |
|
RU2591117C2 |
| УСТРОЙСТВО СОЕДИНЕНИЯ ПЕРА РАМЫ, УЗЕЛ ШАРНИРНОГО КРОНШТЕЙНА И ВЕЛОСИПЕДНАЯ РАМА | 2015 |
|
RU2693393C2 |
| ЧЕМОДАН С ВЫДВИЖНЫМИ РУЛЕВЫМИ КОЛЕСАМИ | 2007 |
|
RU2406421C1 |






Группа изобретений относится к области машиностроения, в частности к самокатам. Самокат содержит нижнюю часть корпуса, переднее и заднее колеса, удлиненную переднюю часть корпуса, направляющую, крепежный элемент. Самокат, по первому варианту, содержит салазки линейного перемещения. Салазки расположены между крепежным элементом и направляющей. Самокат, по второму варианту, содержит второе заднее колесо и узел держателя колес. Узел держателя колес содержит пружину. Система управления самокатом содержит мобильное устройство, содержащее первый датчик позиционирования и самокат. Самокат содержит второй датчик позиционирования, схему беспроводной связи и процессор. Процессор запрограммирован на определение того, находится ли самокат в режиме «Везти». Получение первого местоположения самоката. Установление связи по беспроводной линии передачи данных с мобильным устройством. Получение второго местоположения мобильного устройства. Вычисление маршрута и перемещение самоката по маршруту от первого местоположения ко второму. Достигается повышение безопасности передвижения. 3 н. и 15 з.п. ф-лы, 11 ил.
1. Самокат, содержащий:
нижнюю часть корпуса, имеющую первый и второй концы;
заднее колесо, поддерживаемое с возможностью вращения первым концом;
удлиненную переднюю часть корпуса, имеющую нижний и верхний концы;
направляющую, прикрепленную к передней части корпуса и проходящую от нижнего конца до верхнего конца;
крепежный элемент, установленный с возможностью поворота на втором конце нижней части корпуса и находящийся в зацеплении с направляющей;
переднее колесо, поддерживаемое с возможностью вращения нижним концом; и
салазки линейного перемещения, находящиеся в зацеплении с возможностью скольжения с направляющей,
причем салазки линейного перемещения расположены между крепежным элементом и направляющей, при этом салазки линейного перемещения дополнительно содержат одну или более канавок, находящихся в зацеплении с направляющей, ее верхней и нижней частями, и штоком, проходящими от верхней части до нижней части салазок линейного перемещения, причем крепежный элемент находится в зацеплении с возможностью поворота со штоком.
2. Самокат по п. 1, в котором салазки линейного перемещения перемещаются путем скольжения между нижним концом и верхним концом удлиненной передней части корпуса.
3. Самокат по п. 1, в котором салазки линейного перемещения и крепежный элемент соединены с возможностью поворота.
4. Самокат по п. 1, в котором передняя часть корпуса выполнена с возможностью поворота вокруг оси, поперечной верхней поверхности нижней части корпуса.
5. Самокат по п. 1, в котором крепежный элемент выполнен с возможностью поворота вокруг первой оси штока салазок линейного перемещения.
6. Самокат по п. 5, в котором крепежный элемент содержит канал, причем шток салазок линейного перемещения проходит через канал.
7. Самокат по п. 6, в котором крепежный элемент содержит отверстие, причем нижняя часть корпуса соединена с возможностью поворота с крепежным элементом штифтом, проходящим через отверстие.
8. Самокат по п. 7, в котором первая ось штока салазок линейного перемещения и вторая ось штифта, соединяющего нижнюю часть корпуса с крепежным элементом, являются поперечными.
9. Самокат по п. 1, в котором самокат имеет режим «Ехать», режим «Везти» и режим «Нести», при этом крепежный элемент является смежным с передним колесом, когда самокат находится в режиме «Ехать», крепежный элемент удален от переднего колеса, когда самокат находится в режиме «Везти», и заднее колесо расположено смежно с передним колесом и крепежный элемент является смежным с верхним концом, когда самокат находится в режиме «Нести».
10. Самокат по п. 9, в котором нижняя часть корпуса дополнительно содержит нижнюю поверхность, обращенную в сторону от верхнего конца, когда самокат находится в режиме «Ехать», и нижняя поверхность обращена к передней части корпуса, когда самокат находится в режиме «Нести».
11. Самокат по п. 1, дополнительно содержащий второе заднее колесо, причем второе заднее колесо поддерживается первым концом.
12. Самокат по п. 11, в котором переднее колесо расположено между задним колесом и вторым задним колесом в режиме «Нести».
13. Самокат по п. 11, дополнительно содержащий узел держателя колес, поддерживающий заднее колесо и второе заднее колесо, причем узел держателя колеса дополнительно содержит основание, прикрепленное к нижней поверхности нижней части корпуса, и вилку, поддерживающую заднее колесо и второе заднее колесо, при этом вилка соединена с возможностью поворота с основанием.
14. Самокат по п. 13, в котором вилка выполнена с возможностью поворота вокруг оси, поперечной нижней поверхности нижней части корпуса.
15. Самокат, содержащий:
нижнюю часть корпуса, имеющую первый и второй концы;
заднее колесо, поддерживаемое с возможностью вращения первым концом;
удлиненную переднюю часть корпуса, имеющую нижний и верхний концы;
направляющую, прикрепленную к передней части корпуса и проходящую от нижнего конца до верхнего конца;
крепежный элемент, установленный с возможностью поворота на втором конце нижней части корпуса и находящийся в зацеплении с направляющей;
переднее колесо, поддерживаемое с возможностью вращения нижним концом;
второе заднее колесо, поддерживаемое первым концом; и
узел держателя колес, поддерживающий заднее колесо и второе заднее колесо, причем узел держателя колеса дополнительно содержит основание, прикрепленное к нижней поверхности нижней части корпуса, и вилку, поддерживающую заднее колесо и второе заднее колесо, при этом вилка соединена с возможностью поворота с основанием;
причем узел держателя колес дополнительно содержит пружину, имеющую равновесное состояние и напряженное состояние, при этом пружина находится в равновесном состоянии, когда первое расстояние от заднего колеса до нижней поверхности нижней части корпуса и второе расстояние от второго колеса до нижней поверхности нижней части корпуса равны, и пружина находится в напряженном состоянии, когда первое расстояние и второе расстояние не являются равными.
16. Самокат по п. 15, в котором узел держателя колес дополнительно содержит штифт, соединяющий с возможностью поворота вилку с основанием, причем пружина представляет собой спиральную пружину, проходящую вокруг штифта узла держателя колес.
17. Система управления самокатом, содержащая:
мобильное вычислительное устройство, содержащее первый датчик позиционирования; и
самокат, содержащий второй датчик позиционирования, схему беспроводной связи и процессор, запрограммированный на:
определение того, находится ли самокат в режиме «Везти»;
получение первого местоположения самоката;
установление связи по беспроводной линии передачи данных с мобильным вычислительным устройством;
получение второго местоположения мобильного вычислительного устройства;
вычисление маршрута от первого местоположения ко второму местоположению и
перемещение самоката по маршруту от первого местоположения ко второму местоположению.
18. Система по п. 17, в которой процессор дополнительно запрограммирован на:
определение промежуточного местоположения на маршруте, причем расстояние промежуточного местоположения до второго местоположения по меньшей мере равно минимальному пороговому значению приближения; и
остановку самоката во втором местоположении.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 9090274 B1, 28.07.2015 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| ЧЕМОДАН С ВЫДВИЖНЫМИ РУЛЕВЫМИ КОЛЕСАМИ | 2007 |
|
RU2406421C1 |

