Предлагаемое изобретение относится к области транспортной техники, в частности к одноколейным двухколесным мехатронным индивидуальным транспортным средствам, отличающееся малыми габаритами и весом, а также не требующим специальной подготовки для использования. Данное транспортное средство можно условно отнести к устройству, занимающему промежуточное положение между моторизованными самокатом и скейтбордом.
Уровень техники
Индивидуальный электрический транспорт на аккумуляторных батареях в последнее время становится все более популярным. Его отличают такие важные качества, как автономность транспортировки пользователя, удобство использования, экологичность и др. Известны следующие аналоги предлагаемого индивидуального транспортного средства.
1) Электрическое балансирующее транспортное средство (известно также как «гироскутер»), (патент RU 2619683 С1, МПК: В62К 3/00, В62К 11/00, 02.12.2014), а также широко известное балансирующее транспортное средство «сегвей».
Данные транспортные средства представляют собой платформу с двумя электроприводными колесами на одной оси, систему датчиков и систему управления. Сегвей имеет еще рулевой рычаг (руль). Автоматическое управление по данным с датчиков обеспечивает балансировочное положение наездника, как на нулевой скорости, так и в движении путем изменения тяги приводных двигателей (механическая система представляет собой перевернутый маятник). Управление скоростью и направлением движения гироскутера осуществляется путем поворота опорных площадок ногами наездника, а у сегвея - отклонением тела наездника вперед-назад и поворотом руля.
Недостатком данных транспортных средств является необходимость длительной тренировки по их использованию. Это связано с тем, что в исходном состоянии рассматриваемая система «транспортное средство - наездник» является неустойчивой по направлению движения, что наиболее опасно для наездника, особенно на скорости. Отсюда - некий психологический барьер, мешающий неподготовленному человеку использовать данное транспортное средство в целевом назначении непосредственно без специальной предварительной подготовки. Еще одним недостатком гироскутера является его неприспособленность для перемещения по неровной дороге, что следует из принципа управления направлением движения.
2) Электроскейт, (патент RU 2421263 С1 МПК: А63С 17/12, 25.02.2010). Электроскейт содержит платформу в виде доски с прикрепленными к ней ведомой и ведущей парой колес, расположенных друг за другом по направлению движения. Также он содержит аккумуляторный блок, пульт дистанционного управления, вмонтированный в перчатку наездника для управления скоростью движения и рулевой рычаг для управления направлением движения. Недостатком данного транспортного средства являются его большие габариты и масса.
3). Моторизованное транспортное средство, (патент RU 99438 U1 МПК: В62К 11/02, В62М 7/00, В62К 5/08, А63С 17/12, А63С 17/28, B62D 51/02, В60К 1/00, В62М 7/12, 15.06.2010). Данное транспортное средство отличается от рассмотренного электроскейта тем, что вместо доски здесь используется рама с подставками для ног. В качестве приводного используется единственное заднее колесо. Также имеется дистанционный пульт управления, связанный тросом с основной частью транспортного средства. Моторизованное транспортное средство предназначено для использования как в проселочной местности и вне больших дорог, так и в рамках существующей транспортной инфраструктуры. Основным недостатком этого транспортного средства является также его большие масса и габариты.
В качестве прототипа предполагаемого изобретения используется моторизированный самокат, (патент RU 2641401 С1 МПК: В62К 33/00, В62М 6/45, 08.12.2014). Моторизованный самокат содержит раму, переднее колесо, связанное с рулевым рычагом, заднее колесо, приводной двигатель, устройство управления двигателем, тормоз, аккумуляторную батарею. Управление приводным двигателем осуществляется с учетом автоматически определяемых фаз замедления и ускорения движения. Недостатком этого транспортного средства являются также большие масса и габариты, что снижает удобство индивидуального использования.
Задачей заявленного изобретения является создание мехатронного индивидуального одноколейного двухколесного транспортного средства, обладающего малыми габаритами и весом, что обеспечит удобство его транспортировки, с простыми и естественными приемами управления транспортным средством в виде отклонений тела оператора-наездника, а также не требующего специальной подготовки для его использования.
Задача решается следующим образом.
Во-первых, для уменьшения габаритов и веса предлагается реализовать транспортное средство без рулевого рычага с формированием автоматического управления рулевым колесом так, чтобы обеспечить координированность поворотов. Под координированностью поворотов понимается то, что для оператора-наездника сила тяжести всегда направлена вдоль его тела. Для привода рулевого колеса использовать серводвигатель.
Во-вторых, обеспечить скутер системой датчиков информации: датчиком положения центра тяжести наездника по направлению движения; датчиком угла крена (отклонение плоскости симметрии транспортного средства от вертикальной плоскости, проходящей по направлению движения); датчиком бокового ускорения с осью измерения в плоскости платформы транспортного средства и перпендикулярной направлению движения, датчиком скорости вращения приводного колеса, а также датчиками напряжения на рулевом серводвигателе и блоке управления. Датчиком положения центра тяжести наездника реализуется двумя датчиками веса. Датчики угла крена и бокового ускорения могут быть построены, например, на основе трехосевого гироскопа-акселерометра MPU6050 [MPU-6000/MPU-6050 Product Specification. InvenSense, 2013, 54 p. Website: www.invensense.com.]. Датчик скорости вращения приводного колеса может строиться на основе оптического энкодера. Датчиками напряжения могут строиться на основе схем сравнения напряжений с опорным заданным значением.
В-третьих, возложить на встроенный цифровой контроллер задачу управления, рулевым серводвигателем и приводным двигателем по сигналам от датчиков, указанных выше.
В-четвертых, на основании предложенного реализовать принцип управления транспортным средством по скорости и направлению соответствующими отклонениями тела оператора-наездника.
И, наконец, для обеспечения надежности работы автоматической системы управления рулевым колесом, которая здесь является очень ответственной, дополнить ее аварийным механизмом, кроме того, передачу от рулевого серводвигателя на рулевое колесо сделать переключаемой, а рулевое колесо дополнить устройством для его самостоятельного возвращения в нейтральное положение. Аварийный механизм будет следить за номинальным значениям напряжения на рулевом серводвигателе и блоке управления (посредством соответствующих датчиков), и в случае понижения напряжений ниже заданных порогов будет обеспечивать отсоединение переключаемой передачи рулевого колеса от рулевого сервопривода. За счет устройства для самостоятельного возвращения рулевого колеса в нейтральное положение рулевое колесо будет переводиться в положение для движения без поворота. Также в этом случае будет подаваться сигнал на торможение и формироваться сигнал тревоги через сигнализацию для оповещения оператора-наездника для выполнения им соответствующих действий.
Кроме того, для повышения надежности системы управления рулевым серводвигателем предполагается ее кратное дублирование.
Краткое содержание фигур
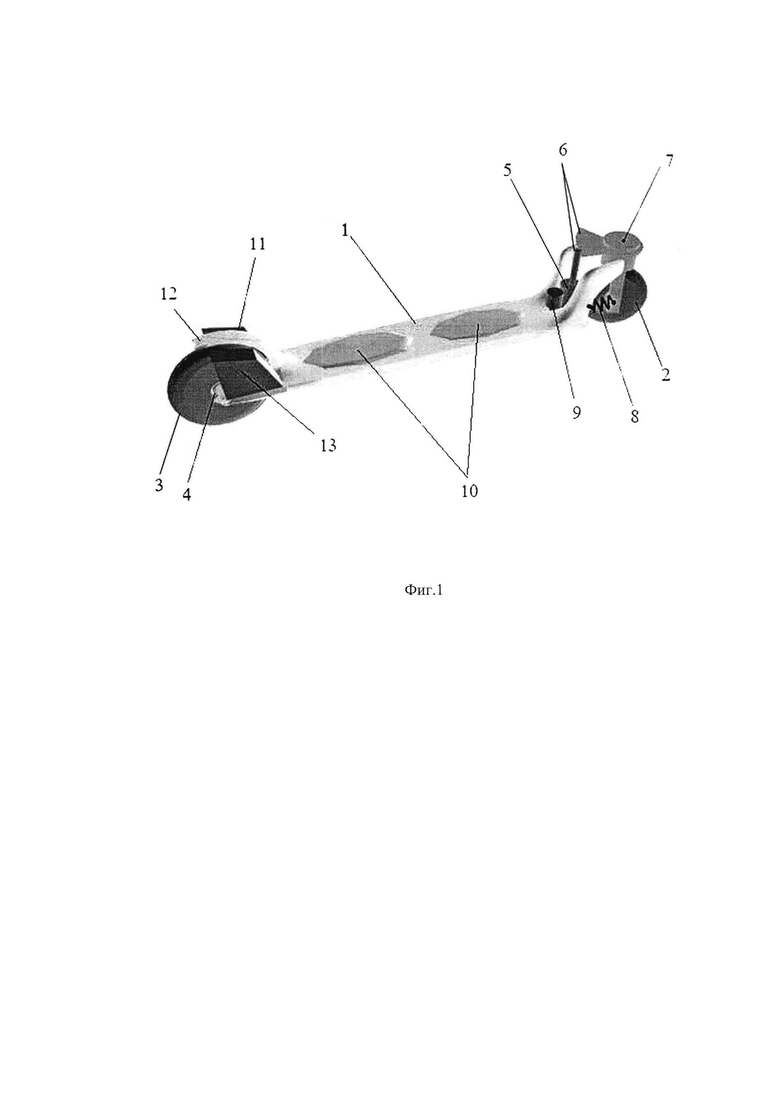
На фиг. 1 представлены основные конструктивные особенности одноколейного двухколесного автоматизированного скутера.
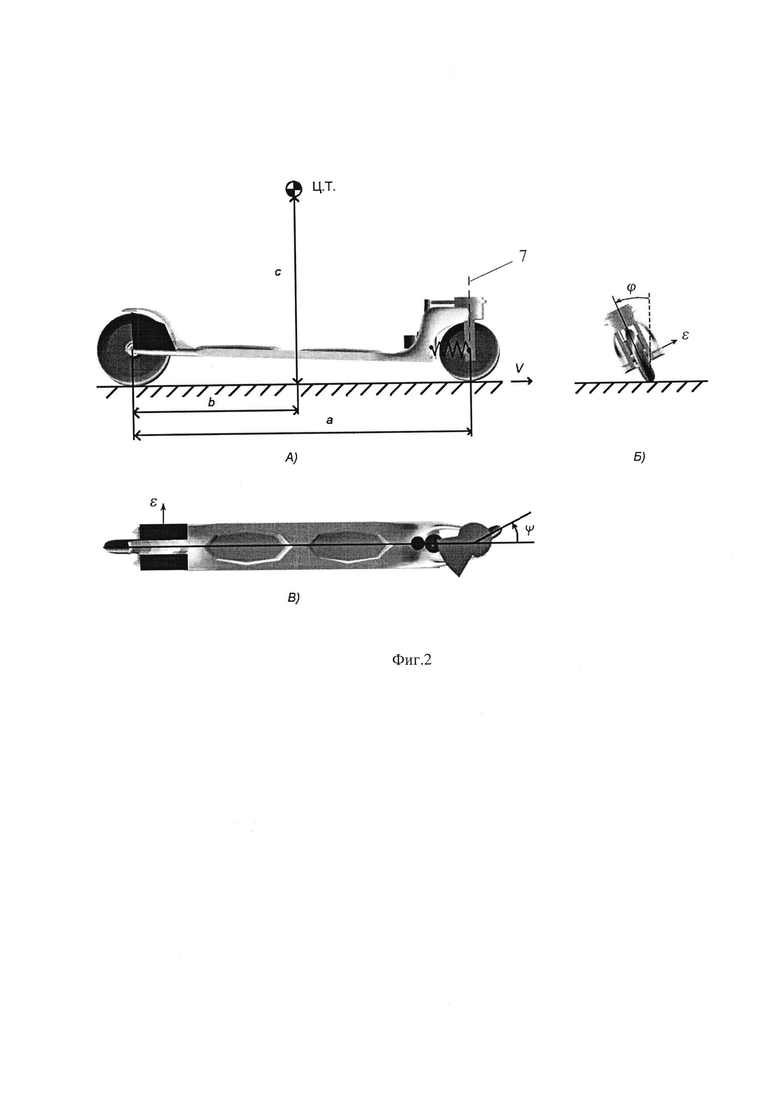
На фиг. 2 представлены основные кинематические параметры объекта управления «скутер-наездник»: А) вид сбоку, Б) вид спереди, В) вид сверху.
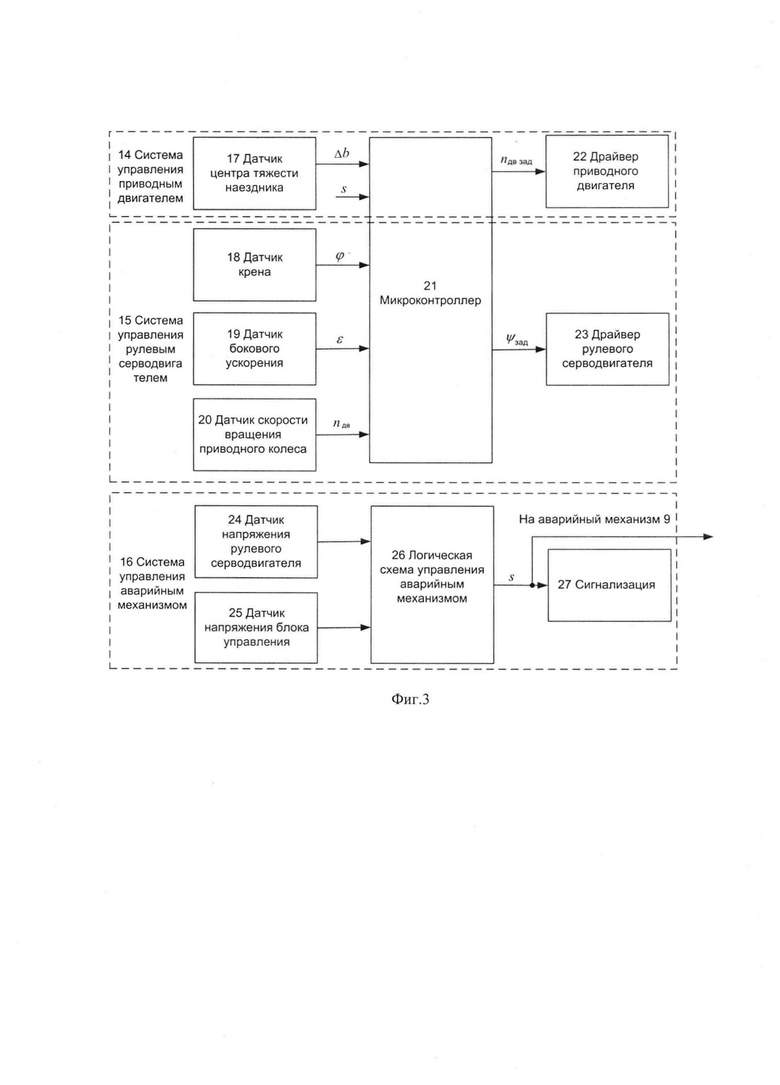
На фиг. 3 представлена структура блока управления транспортным средством.
Осуществление изобретения
На фиг. 1 представлены основные конструктивные особенности одноколейного двухколесного автоматизированного скутера: 1 - платформа-доска; 2 - переднее рулевое колесо; 3 - заднее колесо; 4 - приводной двигатель; 5 - рулевой серводвигатель; 6 - переключаемая передача рулевого колеса; 7 - поворотная ось рулевого колеса; 8 - устройство для самостоятельного возвращения рулевого колеса в нейтральное положение (на фигуре представлено в виде пружины); 9 - аварийный механизм; 10 - датчики веса; 11 - блок управления; 12 - механический тормоз; 13 - блок аккумуляторных батарей.
На фиг. 2 представлены основные кинематические параметры объекта управления «скутер-наездник»: А) вид сбоку, Б) вид спереди, В) вид сверху. На ней приняты следующие обозначения:
Ц.Т. - центр тяжести системы «скутер-наездник»;
ϕ - угол крена - угол отклонения плоскости симметрии скутера от вертикальной плоскости, проходящей вдоль траектории движения;
ψ - угол поворота рулевого колеса, измеряемый в плоскости горизонта;
V - скорость движения;
ε - боковое ускорение, ускорение в плоскости платформы транспортного средства и перпендикулярное направлению движения;
а - колесная база - расстояние между центрами осей заднего и переднего колеса;
b, с - координаты центра тяжести системы «скутер-наездник» в плоскости симметрии скутера относительно точки опоры заднего колеса;
На фиг. 3 представлена структура блока управления 11 транспортным средством. Она включает: 14 - систему управления приводным двигателем; 15 - систему управления рулевым серводвигателем; 16 - систему управления аварийным механизмом; 17 - датчик центра тяжести наездника; 18 - датчик крена; 19 - датчик бокового ускорения; 20 - датчик скорости вращения приводного колеса; 21 - микроконтроллер, 22 - драйвер приводного электродвигателя, 23 - драйвер рулевого серводвигателя; 24 - датчик напряжения рулевого серводвигателя; 25 - датчик напряжения блока управления; 26 - логическая схема системы управления аварийным механизмом; 27 - сигнализация.
Известно, что динамика угла крена двухколесного одноколейного транспортного средства, типа велосипеда, в линеаризованном виде с малыми отклонениями от опорного положения может быть описана как [Неймарк Ю.И., Фуфаев Н.А. Динамика неголономных систем - М.: Наука, Гл. ред. физ.-мат. лит., 1967]:

где t - текущее время; g - ускорение свободного падения; ϑ(t) - внешнее возмущение, появляющееся в т.ч. из-за выхода центра тяжести системы «скутер-наездник» с плоскости симметрии транспортного средства (в скутере используется как управляющее воздействие); начальные значения переменных, влияющие на динамику угла крена, здесь приняты нулевыми; также принимается, что поворотная ось рулевого колеса проходит через центр переднего колеса, а также масса колес пренебрежительно мала по сравнению с остальной частью системы «скутер-наездник».
Из этого равенства при отсутствии внешнего возмущения несложно определить установившиеся значения углов крена и поворота рулевого колеса, соответствующие координированному повороту при 

где ψразв, ϕразв - постоянные значения угла поворота рулевого колеса и крена, обеспечивающие координированный разворот.
Зависимость (2) далее используется как основная составляющая закона управления рулевым колесом. При этом будем считать, что управляющий сигнал ϕ(t),  будет формировать наездник для выбора направления движения путем изменения ϑ(t).
будет формировать наездник для выбора направления движения путем изменения ϑ(t).
Поскольку равенство (2) удовлетворяет соотношение (1) только при постоянных значениях переменных и при отсутствии внешнего возмущения, что не всегда остается справедливым на практике, зависимость (2) предлагается дополнить ПИД-регулятором. Последний должен следить за боковым ускорением, которое будет выступать индикатором координации разворота. Поэтому закон управления рулевым колесом будет (ψзад - заданное значение угла поворота):

где kп, kи, kд - настраиваемые коэффициенты ПИД-регулятора в пропорциональной,
интегральной и дифференциальной его частях соответственно. Предполагается реализация в этом ПИД-регуляторе известных методов борьбы с интегральным насыщением и использование низкочастотной фильтрации в дифференциальной ветви [Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. - М.: Горячая линия-Телеком, 2009].
Несложно видеть, что для реализации закона управления рулевым колесом скутера требуется измерение текущего значения угла крена, бокового ускорения и скорости движения. Первые две величины предлагается определять с помощью датчика крена и бокового ускорения, а скорость движения определять по данным скорости вращения приводного двигателя:

где Rкол - радиус приводного колеса, nдв(t) - текущее значение круговой скорости вращения приводного колеса (приводного двигателя с коэффициентом передачи на приводное колесо 1:1).
Моделирование на компьютере и исследования на макете показывают справедливость закона управления (3) для объекта (1).
Управление приводным двигателем целесообразно строить исходя из требований плавности регулирования и учета сигнала аварии, сформированного системой управления аварийным механизмом. Поэтому закон управления рабочего режима приводного двигателя целесообразно записать в виде

где nдв зад - заданное значение скорости вращения приводного двигателя; nдв 0 - начальная скорость вращения приводного колеса, при которой включаются системы управления; ƒнч(⋅) - функция низкочастотной фильтрации для плавности управления; kдв - подбираемый коэффициент пропорциональности; Δb(t) - текущее отклонение центра тяжести от исходного среднего положения, измеряемое по разности показаний датчиков веса 10; s=0/1 - сигнал, формируемый системой управления аварийным механизмом: 0 - все в порядке, 1 - «авария», напряжение на рулевом серводвигателе или на блоке питания ниже назначенного порога.
При этом предполагается включение приводного двигателя в рабочий режим осуществлять только при достижении угловой скорости вращения приводного колеса заданного значения с небольшой временной задержкой.
Системы управления функционируют следующим образом (см. фиг. 1-3). Оператор-наездник встает одной ногой на платформу 1 скутера, а другой отталкивается для создания начальной скорости. При достижении скорости вращения приводного колеса 3 заданного значения (nдв 0) при отсутствии сигнала «авария» после небольшой временной задержки подключается система управления приводным колесом 14 и система управления рулевым колесом 15. Полагается, что к этому моменту времени оператор-наездник встал обеими ногами на платформу скутера.
По показаниям датчика центра тяжести наездника 17, датчика крена 18, датчика бокового ускорения 19 и датчика скорости вращения приводного колеса 20 микроконтроллер 21 вычисляет по зависимости (5) заданную скорость вращения приводного электродвигателя 4, а по зависимостям (3) и (4) формирует заданное значение угла поворота рулевого колеса 2. Сформированные сигналы поступают в драйвер приводного электродвигателя 22 и драйвер рулевого серводвигателя 23.
Задачей оператора-наездника при дальнейшем использовании скутера является лишь управление скоростью передвижения - перемещением собственного тела вперед-назад, и поворотом скутера влево-вправо - соответствующими боковыми отклонениями тела. Предполагается для экстренного торможения использовать механический тормоз 12.
Система управления аварийным механизмом 16 работает постоянно. При снижении питающих напряжений на рулевом сервоприводе или на блоке управления, датчики напряжений 24 и 25 формируют соответствующие сигналы, по которым логическая схема управления аварийным механизмом 26 формирует сигнал «авария» (s=1). При этом подается сигнал на срабатывание аварийного механизма 9 с отключением переключаемой передачи рулевого колеса 6 от рулевого серводвигателя 5 к рулевому колесу 2. Под действием устройства для самостоятельного возвращения рулевого колеса в нейтральное положение 8 рулевое колесо 2, поворачиваясь вокруг поворотной оси рулевого колеса 7, устанавливается в нейтральное положение (без поворота). Кроме этого, в соответствии с (5) подается сигнал на торможение транспортного средства и включение сигнализации 27, имеющей автономный источник питания (например, конденсатор). В этом случае наездник должен прекратить поворот и ожидать торможения транспортного средства, или самому затормозить с помощью механического тормоза 12.
Группа изобретений относится к области машиностроения, в частности к одноколейным двухколесным автоматизированным скутерам. Одноколейный двухколесный автоматизированный скутер содержит платформу-доску, рулевые колеса, двигатель, систему управления двигателем, тормоз, аккумулятор, устройство для самостоятельного возврата рулевого колеса в нейтральное положение, автоматическое управление рулевым колесом. Система управления приводным двигателем включает датчик центра тяжести оператора-наездника. Система управления рулевым серводвигателем включает датчики крена, бокового ускорения и скорости вращения приводного колеса. Способ использования одноколейного двухколесного автоматизированного скутера заключается в движении с приводом от электродвигателя в заданном направлении. Обеспечивается автоматическая координация поворотов с обеспечением направления вектора силы тяжести вдоль тела оператора-наездника. Включение систем управления приводным двигателем и рулевым серводвигателем в начале движения при достижении заданной скорости. Реализация принципа управления транспортным средством путем отклонения тела оператора-наездника. Реализация аварийного завершения использования транспортного средства. Достигается повышение удобства транспортировки транспортного средства. 2 н.п. ф-лы, 3 ил.
1. Одноколейный двухколесный автоматизированный скутер, содержащий платформу-доску, переднее рулевое колесо, заднее колесо, прикрепленные к платформе, приводной двигатель, выполненный с возможностью вращения одного из колес, систему управления приводным двигателем, механический тормоз, блок аккумуляторных батарей, отличающийся тем, что дополнительно установлено устройство для самостоятельного возврата рулевого колеса в нейтральное положение, установлено автоматическое управление рулевым колесом, включающее рулевой серводвигатель с переключаемой передачей, аварийный механизм, систему управления приводным двигателем, систему управления рулевым серводвигателем и систему управления аварийным механизмом, причем система управления приводным двигателем включает датчик центра тяжести оператора-наездника, информация с которого передается в микроконтроллер, система управления рулевым серводвигателем включает датчик крена, датчик бокового ускорения и датчик скорости вращения приводного колеса, информация с которых передается в микроконтроллер, он формирует команды для драйверов приводного двигателя и рулевого серводвигателя, система управления аварийным механизмом включает датчик напряжения рулевого серводвигателя и датчик напряжения блока управления, объединяющего указанные системы управления, информация с этих датчиков поступает в логическую схему управления аварийным механизмом, которая формирует команду на срабатывание сигнализации, а также команды управления приводным двигателем и аварийным механизмом.
2. Способ использования одноколейного двухколесного автоматизированного скутера, заключающийся в движении с приводом от электродвигателя в заданном направлении, отличающийся тем, что обеспечивается:
автоматическая координация поворотов с обеспечением направления вектора силы тяжести вдоль тела оператора-наездника;
включение систем управления приводным двигателем и рулевым серводвигателем в начале движения при достижении заданной скорости с небольшой временной задержкой;
реализация принципа управления транспортным средством путем отклонения тела оператора-наездника: по скорости - вперед-назад, а по направлению - в соответствующую сторону;
реализация аварийного завершения использования транспортного средства путем фиксирования факта снижения уровня питающих напряжений ниже назначенного порога, формирования оповещающего сигнала, перевода транспортного средства для движения прямо и его торможения.
| МОТОРИЗОВАННЫЙ САМОКАТ | 2014 |
|
RU2641401C1 |
| WO 2012163789 A1, 06.12.2012 | |||
| DE 10053043 A1, 27.09.2001. | |||

