Изобретение относится к машиностроению и может быть использовано в системах управления стрелой и/или грузозахватным органом грузоподъемных кранов, кранов-манипуляторов, бетононасосов и других строительных машин с шарнирно-сочлененной, телескопируемой или решетчатой стрелой.
Известно устройство управления грузоподъемной строительной машиной, содержащее гидравлические распределители приводов машины с ручным управлением, а также, по меньшей мере, один электрогидравлический клапан, включенный в гидравлическую систему машины с возможностью блокирования ее приводов, и датчики параметров грузоподъемного крана, подключенные к цифровому электронному вычислителю, выход которого соединен с электрогидравлическим клапаном [1, 2].
Управление машиной при этом осуществляется оператором путем воздействия на гидравлические распределители каждого привода, что требует повышенных усилий управления и ухудшает условия труда оператора.
Этого недостатка не имеет устройство управления грузоподъемной машиной, содержащее аппараты электрогидравлического управления, выполненные с возможностью формирования электрических сигналов управления исполнительными устройствами приводов машины в зависимости от перемещений рукояток этих аппаратов в направлениях, соответствующих заданию режимов работы каждого привода [3, 4].
Недостатком этого устройства является сложность управления машиной в режиме прямолинейного перемещения оголовка (конца) ее стрелы или грузозахватного органа, при котором требуется взаимосвязанное управление отдельными приводами машины. Особенно сложным является управление машиной с шарнирно-сочлененной стрелой, например, автобетононасосом, в режиме укладки бетона по прямой линии.
Известно также устройство управления стрелой, формирующее полярную систему координат, три координатные оси которой соответствуют повороту стрелы, ее удлинению/укорачиванию и увеличению/уменьшению высоты. В этом устройстве для осуществления управления по трем направлениям в полярной системе координат используется рычаг управления, имеющий три направления основного регулирования. Каждое направление соответствует одной координатной оси. Сигнал с рычага вычислительным устройством преобразуется в компоненты управления относительным поворотом и перемещением отдельных секций стрелы и поворотом стрелы в целом таким образом, чтобы оголовок стрелы можно было переместить по этой координате путем перемещения одного рычага управления. Компоненты управления по трем координатным осям могут комбинироваться, обеспечивая независимое управление стрелой по трем координатным осям [5, 6].
Однако сформированная таким образом система координат не обеспечивает точного управления траекторией перемещения оголовка (конца) стрелы машины по прямым линиям, не проходящим через ось вращения поворотной платформы (стрелы) машины. Например, типичным способом укладки бетона является укладка вдоль прямых линий, перпендикулярных друг другу, что требует соответствующего перемещения конца стрелы бетононасоса. Однако, при использовании полярной системы координат, перемещение конца стрелы в горизонтальной плоскости из одной точки в другую по линии, не проходящей через ось поворота платформы машины, невозможно при перемещении одной рукоятки управления в одном направлении. В этом случае требуется согласованное воздействие оператора одновременно на несколько рукояток управления, что снижает как удобство, так и точность управления.
Более совершенным является интеллектуальное устройство управления стрелой с несколькими сочлененными секциями, которое содержит пульт дистанционного управления, блок управления и датчики углового положения отдельных секций и стрелы в целом. Пульт управления содержит дисплейный блок обратной связи, предназначенный для графического и текстового отображения результатов выполнения текущей операции управления стрелой машины. Управление приводами стрелы осуществляется из условия перемещения ее конца в заданной цилиндрической или прямоугольной (декартовой) системе координат в соответствии с командами управления по этим координатам. Блок управления, используя выходные сигналы датчиков углового положения секций стрелы и поворотной платформы, вычисляет действительное положение отдельных секций и стрелы в целом и корректирует команды управления соответствующими приводами, причем команды управления перемещением стрелы по осям X, Y и Z предварительно установленной системы координат раскладываются на команды управления приводами отдельных секций и поворота стрелы. Для задания системы координат осуществляется установка стрелы машины в определенные положения, а блок управления выполнен с возможностью запоминания этих положений и последующего формирования осей координат в соответствии с направлениями, заданными этими положениями [7].
В этом устройстве, при передаче оператором с пульта управления команды на установку прямоугольной или цилиндрической системы координат, в качестве начала отсчета используется поворотная платформа, а направление стрелы - в качестве положительного направления оси Y этой системы координат. Эта команда передается, преимущественно, при нахождении рычага управления на пульте в центральном (нейтральном) положении.
Другой вариант установки прямоугольной системы координат в известном устройстве реализуется после перевода переключателя режима работы в «обучающий» режима. В «обучающем» режиме оператор, осуществляя управление машиной, перемещает конец стрелы в определенные положения на горизонтальной плоскости. Координаты положения конца стрелы записываются в память блока управления. Далее блок управления формирует в пространстве соединительную линию от начальной точки к конечной, которая принимается в качестве положительного направления оси X. Соответственно, ось Y определяется блоком управления как ось, горизонтальная и перпендикулярная оси X.
После установки системы координат, перемещение оператором пропорционального рычага управления пульта в основном направлении, соответствующем оси X, приводит к перемещению конца стрелы параллельно оси Х в плоскости прямоугольной системы координат, перемещение пропорционального рычага управления в направлении, соответствующем оси Y, соответствует перемещению конца стрелы параллельно оси Y в этой же плоскости. Перемещение другого рычага пропорционального управления в направлении, соответствующем оси Z, приводит к вертикальному перемещению стрелы - изменению высоты конца стрелы по оси Z.
Известное устройство обеспечивает повышенную точность и удобство управления концом (оголовком) стрелы строительной машины. Однако для задания системы координат в этом устройстве необходимо последовательное перемещение стрелы машины в различные пространственные положения.
Это приводит к снижению производительности машины за счет дополнительных затрат времени на перемещение стрелы, а также к снижению безопасности ее работы ввиду возможных столкновений стрелы с препятствиями в процессе установки системы координат.
В известном устройстве не обеспечивается также необходимая точность и удобство управления грузозахватным органом строительной машины, например грузоподъемного крана, поскольку при работе грузовой лебедки оголовок (конец) стрелы и грузозахватный орган двигаются по различным траекториям, что не отслеживается блоком управления.
Техническими результатами, на достижение которых направлено заявленное изобретение, являются:
- повышение эффективности работы строительной машины за счет сокращения затрат времени на установку системы координат и обеспечения точного управления положением грузозахватного органа в заданной системе координат;
- повышение безопасности работы машины за счет исключения перемещений ее стрелы при установке системы координат и за счет предоставления оператору на дисплейном устройстве более полной предупредительной информации о возникновении потенциально опасных ситуаций;
- повышение удобства работы оператора за счет повышения информативности дисплейного устройства.
В устройстве управления строительной машиной, содержащем пульт управления, расположенный на машине или выполненный автономным с возможностью проводной или беспроводной передачи сигналов, датчики пространственного положения стрелы и поворотной платформы машины, дисплейное устройство и электронный блок управления, осуществляющий прием и обработку сигналов с датчиков и пульта, а также установку и запоминание системы координат и формирование, в зависимости от результатов этой обработки, информационных сигналов и сигналов управления приводами машины путем разложения команд с пульта управления на сигналы управления приводами секций стрелы, поворота стрелы или платформы машины таким образом, что перемещению органа управления на пульте в одном основном направлении соответствует перемещение конца стрелы по одной оси установленной системы координат, указанные технические результаты достигаются тем, что дисплейное устройство, а также электронный блок и/или пульт управления выполнены с возможностью отображения системы координат на дисплейном устройстве и с возможностью использования отображаемой информации при установке оператором системы координат.
Во втором варианте устройства управления строительной машиной, содержащего аналогичный пульт управления, датчики пространственного положения стрелы, дисплейное устройство и электронный блок управления, осуществляющий прием и обработку сигналов с датчиков и пульта, а также установку и запоминание системы координат и формирование, в зависимости от результатов этой обработки, информационных сигналов для оператора и/или сигналов управления приводами машины путем аналогичного разложения команд с пульта управления на сигналы управления приводами, указанные технические результаты достигаются за счет того, что устройство управления дополнительно оснащено датчиком положения грузозахватного органа по высоте, электронный блок управления приспособлен для приема и обработки сигналов с этого датчика и формирования сигналов управления приводом подъема/опускания грузозахватного органа, например, приводом грузовой лебедки, а конструктивным элементом строительной машины, для которого устанавливается система координат, является грузозахватный орган машины.
Кроме того, для достижения указанных технических результатов, в обоих вариантах системы управления строительной машиной, в частности:
- электронный блок управления приспособлен для установки и запоминания прямоугольной, полярной, цилиндрической, и/или сферической системы координат и выполнен с возможностью выбора одной из установленных систем координат по сигналу оператора с пульта управления;
- пульт управления и дисплейное устройство выполнены с возможностью выбора и корректировки списка имен и параметров установленных систем координат, а также их отображения на экране дисплейного устройства;
- электронный блок выполнен с возможностью запоминания пространственного положения конца стрелы или грузозахватного органа и последующей установки системы координат с использованием этих положений;
- дисплейное устройство выполнено с возможностью отображения на его экране местоположения начала системы координат, ее осей, и, при необходимости, пиктограмм по управлению началом координат и направлениями осей, а пульт управления - с возможностью ввода начала и направлений осей координат посредством ввода в блок управления их численных значений или использования курсора;
- дисплейное устройство оснащено сенсорным экраном, используемым для установки системы координат;
- пульт управления оснащен органом управления для плавного или дискретного поворота системы координат;
- электронный блок управления и дисплейное устройство выполнены с возможностью отображения границ разрешенной зоны работы строительной машины, введенных в электронный блок управления при задании параметров координатной защиты;
- дополнительно используется видеокамера и отображение на экране дисплейного устройства зоны работы машины и системы координат;
- электронный блок управления выполнен с возможностью приема сигналов от внешнего устройства позиционирования и установки системы координат по командам оператора с использованием этих сигналов.
Реализация указанных отличительных признаков позволяет:
- реализовать возможность установки и изменения системы координат без изменения пространственного положения стрелы и грузозахватного органа машины;
- обеспечить повышенную точность и удобство управления в установленной системе координат не только концом (оголовком) стрелы, но и грузозахватным органом строительной машины;
- реализовать удобную для оператора машины процедуру ввода системы координат, а также повышенную информативность дисплейного устройства.
Поэтому реализация этих отличительных признаков находится в прямой причинно-следственной связи с достижением указанных технических результатов заявленного изобретения.
На чертеже приведена упрощенная функциональная схема устройства управления строительной машиной.
Устройство содержит электронный блок управления 1 и подключенные к нему при помощи отдельных проводов, мультиплексной линии связи (CAN, LIN и т.п.) или беспроводного интерфейса (ZigBee, Bluetooth, Wi-Fi и т.д.) пульт управления строительной машиной 2, дисплейное устройство 3, датчики пространственного положения стрелы, ее отдельных секций, грузозахватного органа и поворотной платформы 4 и дополнительные датчики 5.
Электронный блок управления 1, именуемый также «блоком обработки данных», «цифровой вычислительной машиной», «блоком управления и индикации», «контроллером» и т.п., реализован на основе микроконтроллера 6. К нему подключены устройство ввода/вывода информации 7, запоминающее устройство (Flash-память) 8 и, при необходимости, органы управления (клавиатура), световые, графические, символьные, световые и/или звуковые индикаторы, часы реального времени и другие устройства, условно не показанные на чертеже.
Пульт управления 2 в общем случае включает в себя переключатели выбора режимов работы устройства и режимов управления машиной: управления положением конца (оголовка) или грузозахватного органа, управления в ручном режиме (в режиме управления отдельными приводами), а также управления в прямоугольной или цилиндрической системе координат.
Пульт управления 2 имеет также набор пропорциональных рычагов для управления машиной по осям X, Y и Z. Для управления по осям Х и Y используется, преимущественно, двухкоординатный орган (рычаг) управления. При этом управление по вертикали (по оси Z) осуществляется при помощи другого рычага пропорционального управления.
Пульт 2 содержит также дополнительные органы управления, предназначенные для управления выбором, записью и стиранием параметров системы координат, поворота ее осей, управления курсором при задании параметров системы координат, управления параметрами видеоизображения и т.д.
Дисплейное устройство 3 выполнено на основе жидкокристаллического графического дисплея в виде отдельной конструкции, установленной в кабине машины перед оператором. Если используется дистанционное управление машиной, то пульт управления 2 и дисплейное устройство 3 конструктивно объединены и выполнены в виде пульта дистанционного управления.
Датчики положения 4 (датчик длины стрелы, датчик угла азимута, датчики угла наклона стрелы и ее отдельных секций, датчик предельного подъема и высоты грузозахватного органа и т.д.), выполнены в виде гравитационных датчиков углового положения, потенциометрических датчиков угла или датчиков линейного перемещения. Датчик положения грузозахватного органа по высоте может быть выполнен в виде датчика длины (сматывания) каната грузовой лебедки.
Дополнительные датчики 5 могут включать в себя видеокамеру, датчик нагрузки или веса поднимаемого груза (датчик силы или датчики давления в гидроцилиндрах приводов стрелы или ее отдельных секций), датчик приближения к линии электропередачи, датчики продольного и поперечного наклона базового шасси машины, датчики обратной связи приводов машины, приемное устройство сигналов от внешнего устройства позиционирования и т.д. Необходимый состав дополнительных датчиков 5 определяется конструкцией конкретной строительной машины, вариантом реализации ее системы управления, и необходимостью реализации дополнительных функций этой системы, например, функций защиты машины от перегрузки и от столкновений с препятствиями при работе в стесненных условиях (функций координатной защиты).
Приводы строительной машины выполнены, преимущественно, в виде гидроцилиндров или гидромоторов, управляемых электрическими пропорциональными или дискретными клапанами. Электронный блок управления 1 соединен с этими приводами через исполнительное устройство 9, выполненное в виде силового электронного блока с дискретными, пропорциональными или широтно-импульсными выходными сигналами.
Устройство управления машиной работает следующим образом.
Перед началом работы строительной машины оператор с помощью органов управления, расположенных на пульте управления 2, осуществляет выбор или формирование системы координат, в которой осуществляется управление перемещением оголовка стрелы или грузозахватного органа машины. Контроль выполнения этих операций оператор осуществляет с использованием дисплейного устройства 3.
Если в запоминающем устройстве 8 ранее были записаны системы координат, то по команде с пульта управления 2 их имена и параметры выводятся на экран дисплейного устройства 3. Оператор, с использованием органов управления пульта 2 или сенсорного экрана дисплейного устройства 3, выбирает одну из этих систем координат. Этот выбор, для повышения удобства работы оператора, может осуществляться в диалоговом режиме с использованием курсора на экране дисплейного устройства 3.
При необходимости оператор осуществляет корректировку отдельных параметров этой системы координат, выведенных на экран дисплейного устройства 3. Внесенные изменения сохраняются в запоминающем устройстве 8.
Установка новой системы координат осуществляется оператором с использованием дисплейного устройства 3, на котором отображаются элементы устанавливаемой системы координат в процессе ее ввода.
На этом экране, в общем случае, отображается зона работы машины (строительная площадка), схематичное изображение на ней строительной машины, ее стрелы и грузозахватного органа, а также введенных ограничений по координатной защите - отображение различных препятствий, расположенных на строительной площадке, столкновения с которыми необходимо избежать, а также границ отдельных зон, над которыми запрещен перенос грузов. На этом экране отображается также местоположение начала системы координат, ее оси, и, при необходимости, пиктограммы по управлению положением начала системы координат и направлениями ее осей.
Оператор, визуально контролируя положение машины на строительной площадке и используя информацию, отображаемую на экране дисплейного устройства 3, с помощью пульта управления 2 устанавливает начало новой системы координат в необходимой точке экрана дисплейного устройства, соответствующей определенной точке рабочей площадки. Далее оператор выбирает необходимую систему координат - прямоугольную, полярную, цилиндрическую или сферическую. Положение осей вводимой системы координат задается путем ввода оператором с пульта управления 2 численных значений параметров, определяющих их направления на экране дисплейного устройства и, соответственно, в рабочем пространстве строительной машины, с использованием команд фиксации положения курсора в определенных точках экрана дисплейного устройства 3, через которые должны проходить координатные оси, путем воздействия на сенсорный экран и другими способами.
Схематичное изображение рабочей зоны строительной машины при реализации описанной процедуры ввода системы координат, с целью повышения удобства работы оператора и повышения точности ввода, может быть заменено на ее видеоизображение.
Система координат может быть также установлена путем последовательного перемещения конца стрелы или грузозахватного органа машины в определенные положения и запоминания этих положений как точек, проходящих через начало и оси координат.
Для повышения точности и безопасности установки системы координат, перемещение стрелы или грузозахватного органа может быть заменено перемещением внешнего устройства позиционирования. В этом случае устройство управления строительной машиной дополнительно оснащается внешним устройством позиционирования и входящим в состав датчиков 5 дополнительным устройством приема/передачи сигналов внешнего устройства позиционирования.
Принцип определения положения внешнего устройства позиционирования относительно строительной машины может быть инерциальным, с использованием приемников глобального спутникового позиционирования (GPS), установленных на машине и во внешнем устройстве позиционирования, с использованием дальномеров и т.д. Внешнее устройство позиционирования и электронный блок управления 1 взаимодействуют между собой по проводному или беспроводному каналу обмена данными.
Рабочий на строительной площадке при установке системы координат последовательно переносит внешнее устройство позиционирование в отдельные точки, через которые должны проходить оси координат. Например, в отдельные точки линии укладки бетона автобетононасосом. Не менее чем в двух точках этой линии по команде рабочего на стройплощадке или оператора строительной машины осуществляется запись координат этих точек в запоминающее устройство 8 или в память микроконтроллера 6.
Далее микроконтроллер 6 с использованием координат этих точек формирует линию, проходящую через эти точки, и, после вычисления ее проекции на горизонтальную или вертикальную плоскость, устанавливает соответствующую ось системы координат и отображает ее на экране дисплейного устройства 3. После контроля и, при необходимости, коррекции оператором параметров вводимой системы координат, они записываются в запоминающее устройство 8 и далее используются при управлении машиной.
Оператор, после выбора или установки системы координат, осуществляет управление машиной с пульта управления 2. В процессе этого управления микроконтроллер 6 электронного блока управления 1 работает по программе, записанной в его встроенной памяти программ или в запоминающем устройстве 8, и через устройство ввода/вывода информации 7 осуществляет обмен данными с пультом управления 2 и с датчиками 4 и 5.
После получения информации от датчиков 4 и 5 микроконтроллер 6 с использованием математической модели машины, хранящейся в запоминающем устройстве 8, определяет текущее (действительное) положение стрелы, ее отдельных секций и грузозахватного органа машины и передает соответствующие сигналы отображения их положений на дисплейное устройство 3. Эти положения отображаются одновременно с выбранной системой координат.
При управлении машиной оператор перемещает одну из рукояток управления пульта 2 в основном направлении одной из осей координат X, Y или Z, соответствующем перемещению конца стрелы или грузозахватного органа в требуемом направлении. Этот сигнал с пульта 2 через устройство ввода/вывода информации 7 поступает на микроконтроллер 6.
Микроконтроллер 6, анализируя текущее положение стрелы и грузозахватного органа машины, осуществляет декомпозицию (разложение) сигнала с пульта управления на отдельные сигналы управления каждым приводом машины. Это разложение осуществляется таким образом, чтобы приводы машины под воздействием этих сигналов управления обеспечивали перемещение конца стрелы или грузозахватного органа именно в направлении той оси координат, которая задана оператором при отклонении рукоятки управления.
Если, например, в прямоугольной системе координат оператор сформировал команду на прямолинейное перемещение грузозахватного органа стрелового крана по горизонтальной оси Х или Y, то, для сохранения высоты грузозахватного органа неизменной (Z=const), осуществляется одновременное формирование как сигнала управления приводом подъема/опускания стрелы (для изменения вылета), так и сигнала управления приводом грузовой лебедки. При этом электронный блок управления 1 поддерживает необходимое соотношение между сигналами управления приводами подъема/опускания стрелы и грузовой лебедки, устанавливаемое из условия, что изменение высоты грузозахватного органа за счет подъема/опускания стрелы должно быть скомпенсировано приводом грузовой лебедки.
Отклонение оператором рукоятки на пульте управления 2 на больший или меньший угол по какой-либо оси X, Y или Z приводит, соответственно, к увеличению или уменьшению скорости перемещения конца стрелы или грузозахватного органа по этой оси. При одновременном отклонении рукоятки управления в направлениях осей Х и Y, т.е. при совмещенном управлении, электронный блок управления 1 осуществляет формирование сигналов управления и приводами одновременно в двух осях X, Y. Дополнительное отклонение рукоятки управления по оси Z приводит к вертикальному перемещению конца стрелы или грузозахватного органа.
При осуществлении управления приводами, микроконтроллер 6 дополнительно контролирует допустимость перемещений конца стрелы или грузозахватного органа из условий предотвращения перегрузки машины или столкновений с препятствиями, параметры которых предварительно записываются в запоминающее устройство 8 при вводе параметров координатной защиты. В случае, если эти перемещения недопустимы, осуществляется блокирование работы приводов или изменение сигналов управления этими приводами.
Одновременно с формированием сигналов на исполнительное устройство 9, электронный блок управления 1 выдает на дисплейное устройство 3 сигналы, информирующие оператора о параметрах работы машины и предупреждающие его о возникновении потенциально опасных ситуаций.
Для документирования работы строительной машины, устройство управления может содержать внешний или встроенный регистратор параметров, реализованный на основе запоминающего устройства 8, в которое микроконтроллер 6 периодически записывает значения основных параметров работы машины (вылета, угла наклона и длины стрелы, грузового момента, и т.п.), предупреждающих сигналов и сигналов управления машиной. Регистратор выполнен с возможностью считывания этих данных для анализа эффективности работы машины и для расследования причин возможных отказов и аварий.
В данном описании схематично приведены лишь частные варианты реализации предложенного устройства управления строительной машиной. Изобретение охватывает другие возможные варианты его исполнения и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ МАШИНЫ С ГРАФИЧЕСКИМ ДИСПЛЕЕМ | 2010 |
|
RU2448036C1 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| Система дистанционного управления строительной машиной | 2023 |
|
RU2817073C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2321534C2 |
| СПОСОБ ПОДДЕРЖКИ КРАНОВЩИКА ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОЙ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280608C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |
Изобретения относятся к вариантам устройства управления строительной машиной. Устройство содержит пульт управления, расположенный на машине или выполненный автономным с возможностью проводной или беспроводной передачи сигналов, а также датчики пространственного положения стрелы и/или ее отдельных секций и/или поворотной платформы машины. Устройство содержит электронный блок управления, приспособленный для приема и обработки сигналов с датчиков и пульта управления, а также для установки и запоминания системы координат и формирования в зависимости от результатов этой обработки информационных сигналов для оператора и/или сигналов управления приводами машины и дисплейное устройство. Дисплейное устройство выполнено с возможностью отображения информации, поступающей от электронного блока и/или пульта управления. Электронный блок управления выполнен с возможностью разложения команд с пульта управления на формируемые сигналы управления приводами стрелы и/или ее отдельных секций и/или поворотной платформы машины таким образом, чтобы перемещению органа управления на пульте в одном основном направлении соответствовало перемещение конца стрелы по одной оси установленной системы координат. Согласно первому варианту дисплейное устройство, а также электронный блок и/или пульт управления, выполнены с возможностью отображения системы координат на дисплейном устройстве, которое оснащено сенсорным экраном, а электронный блок управления и дисплейное устройство выполнены с возможностью установки системы координат с использованием сигналов, формируемых сенсорным экраном при воздействии на него оператора. Согласно второму варианту устройство дополнительно содержит датчик положения грузозахватного органа по высоте, а электронный блок управления приспособлен для приема и обработки сигналов с этого датчика и формирования сигналов управления приводом подъема/опускания грузозахватного органа. Конструктивным элементом строительной машины, для которого устанавливается система координат, является грузозахватный орган машины. Достигается повышение эффективности работы строительной машины и точность управления грузозахватным органом в заданной системе координат. 2 н. и 22 з.п. ф-лы, 1 ил.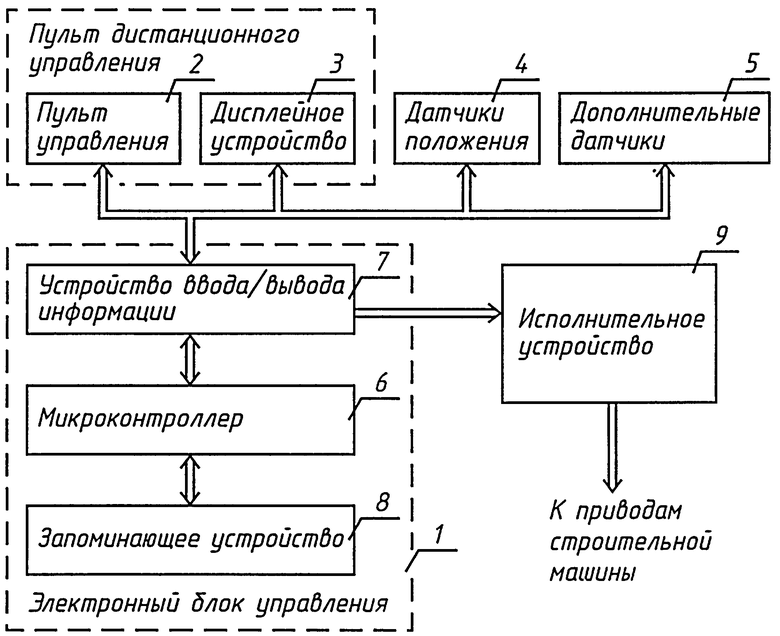
1. Устройство управления строительной машиной, содержащее пульт управления, расположенный на машине или выполненный автономным с возможностью проводной или беспроводной передачи сигналов, датчики пространственного положения стрелы и/или ее отдельных секций, и/или поворотной платформы машины, электронный блок управления, приспособленный для приема и обработки сигналов с датчиков и пульта управления, а также для установки и запоминания системы координат и формирования в зависимости от результатов этой обработки информационных сигналов для оператора и/или сигналов управления приводами машины, и дисплейное устройство, выполненное с возможностью отображения информации, поступающей от электронного блока и/или пульта управления, причем электронный блок управления выполнен с возможностью разложения команд с пульта управления на формируемые сигналы управления приводами стрелы и/или ее отдельных секций, и/или поворотной платформы машины таким образом, что перемещению органа управления на пульте в одном основном направлении соответствует перемещение конца стрелы по одной оси установленной системы координат, отличающееся тем, что дисплейное устройство, а также электронный блок и/или пульт управления выполнены с возможностью отображения системы координат на дисплейном устройстве, которое оснащено сенсорным экраном, а электронный блок управления и дисплейное устройство выполнены с возможностью установки системы координат с использованием сигналов, формируемых сенсорным экраном при воздействии на него оператора.
2. Устройство по п.1, отличающееся тем, что электронный блок управления приспособлен для установки и запоминания прямоугольной, и/или полярной, и/или цилиндрической, и/или сферической системы координат.
3. Устройство по п.1 или 2, отличающееся тем, что электронный блок управления выполнен с возможностью выбора одной из установленных систем координат по сигналу оператора с пульта управления и с возможностью последующего использования выбранной системы координат при формировании информационных сигналов для оператора и/или сигналов управления приводами машины.
4. Устройство по п.3, отличающееся тем, что пульт управления и дисплейное устройство выполнены с возможностью отображения на экране дисплейного устройства списка имен и параметров установленных систем координат, а также с возможностью стирания или корректировки параметров отдельных систем координат.
5. Устройство по п.1, отличающееся тем, что электронный блок управления дополнительно выполнен с возможностью запоминания пространственного положения конца стрелы по командам оператора и последующей установки системы координат из условия прохождения оси системы координат, по меньшей мере, через две точки или через две проекции точек на горизонтальную или вертикальную плоскость.
6. Устройство по п.1, отличающееся тем, что дисплейное устройство выполнено с возможностью отображения на его экране местоположения начала системы координат, ее осей, и, при необходимости, пиктограмм по управлению положением начала системы координат и направлениями ее осей.
7. Устройство по п.1 или 6, отличающееся тем, что пульт управления выполнен с возможностью ввода начала и направлений осей координат посредством ввода в блок управления их численных значений и/или путем перемещений курсора по экрану дисплейного устройства и передачи оператором команд запоминания отдельных положений этого курсора.
8. Устройство по п.1, отличающееся тем, что пульт управления оснащен органом управления для формирования сигналов плавного или дискретного поворота системы координат вокруг ее оси, а электронный блок управления выполнен с возможностью приема сигнала органа управления и соответствующего преобразования системы координат.
9. Устройство по п.1, отличающееся тем, что электронный блок управления и дисплейное устройство выполнены с возможностью отображения на экране дисплейного устройства границ разрешенной зоны работы строительной машины, введенных в электронный блок управления при задании параметров координатной защиты.
10. Устройство по п.1, отличающееся тем, что оно дополнительно оснащено видеокамерой, а дисплейное устройство выполнено с возможностью приема видеосигналов и их отображения на экране одновременно с введенной системой координат.
11. Устройство по п.1, отличающееся тем, что электронный блок управления выполнен с возможностью приема сигналов от внешнего устройства позиционирования и установки системы координат по командам оператора с использованием этих сигналов.
12. Устройство управления строительной машиной, содержащее пульт управления, расположенный на машине или выполненный автономным с возможностью проводной или беспроводной передачи сигналов, датчики, установленные на строительной машине и выполненные с возможностью измерения параметров, характеризующих пространственное положение стрелы, электронный блок управления, приспособленный для приема и обработки сигналов с датчиков и пульта управления, а также для установки и запоминания системы координат и формирования в зависимости от результатов этой обработки информационных сигналов для оператора и/или сигналов управления приводами машины, и дисплейное устройство, выполненное с возможностью отображения информации, поступающей от электронного блока и/или пульта управления, причем электронный блок управления выполнен с возможностью разложения команд с пульта управления на формируемые сигналы управления приводами машины таким образом, что перемещению органа управления на пульте в одном основном направлении соответствует перемещение конструктивного элемента строительной машины по одной оси установленной системы координат, отличающееся тем, оно дополнительно содержит датчик положения грузозахватного органа по высоте, электронный блок управления приспособлен для приема и обработки сигналов с этого датчика и формирования сигналов управления приводом подъема/опускания грузозахватного органа, а конструктивным элементом строительной машины, для которого устанавливается система координат, является грузозахватный орган машины.
13. Устройство по п.12, отличающееся тем, что дисплейное устройство, а также электронный блок и/или пульт управления выполнены с возможностью отображения системы координат на дисплейном устройстве и с возможностью использования информации, отображаемой на дисплейном устройстве при установке оператором системы координат.
14. Устройство по п.12, отличающееся тем, что электронный блок управления выполнен с возможностью запоминания пространственного положения грузозахватного органа по командам оператора и последующей установки системы координат из условия прохождения оси этой системы координат, по меньшей мере, через две точки или через две проекции этих точек на горизонтальную или вертикальную плоскость.
15. Устройство по п.12, отличающееся тем, что электронный блок управления приспособлен для установки и запоминания прямоугольной, и/или полярной, и/или цилиндрической, и/или сферической системы координат.
16. Устройство по п.12 или 15, отличающееся тем, что электронный блок управления выполнен с возможностью выбора одной из установленных систем координат по сигналу оператора с пульта управления и с возможностью последующего использования выбранной системы координат при формировании информационных сигналов для оператора и/или сигналов управления приводами машины.
17. Устройство по п.16, отличающееся тем, что пульт управления и дисплейное устройство выполнены с возможностью отображения на экране дисплейного устройства списка имен и параметров установленных систем координат, а также с возможностью выбора одной из систем координат для осуществления управления и, при необходимости, для стирания или корректировки параметров отдельных систем координат.
18. Устройство по п.12, отличающееся тем, что дисплейное устройство выполнено с возможностью отображения на его экране местоположения начала системы координат и осей системы координат, и, при необходимости, пиктограмм по управлению положением начала системы координат и направлениями осей системы координат.
19. Устройство по п.12 или 18, отличающееся тем, что пульт управления выполнен с возможностью ввода начала и направлений осей координат посредством ввода в блок управления их численных значений и/или путем перемещений курсора по экрану дисплейного устройства и передачи оператором команд запоминания отдельных положений этого курсора.
20. Устройство по п.12 или 18, отличающееся тем, что дисплейное устройство оснащено сенсорным экраном, а электронный блок управления и дисплейное устройство выполнены с возможностью установки системы координат с использованием сигналов, формируемых сенсорным экраном при воздействии на него оператора.
21. Устройство по п.12, отличающееся тем, что пульт управления оснащен органом управления для формирования сигналов плавного или дискретного поворота системы координат вокруг ее оси, а электронный блок управления выполнен с возможностью приема сигнала этого органа управления и соответствующего преобразования системы координат.
22. Устройство по п.12, отличающееся тем, что электронный блок управления и дисплейное устройство выполнены с возможностью отображения на экране дисплейного устройства границ разрешенной зоны работы строительной машины, введенных в электронный блок управления при задании параметров координатной защиты.
23. Устройство по п.12, отличающееся тем, что оно дополнительно оснащено видеокамерой, а дисплейное устройство выполнено с возможностью приема видеосигналов и их отображения на экране одновременно с введенной системой координат.
24. Устройство по п.12, отличающееся тем, что электронный блок управления выполнен с возможностью приема сигналов от внешнего устройства позиционирования и установки системы координат по командам оператора с использованием этих сигналов.
| ИНТЕЛЛЕКТУАЛЬНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ СТРЕЛОЙ | 2007 |
|
RU2344923C1 |
| US 5823370 A, 20.10.1998 | |||
| US 6985085 B1, 10.01.2006. | |||

