Область техники, к которой относится изобретение
Изобретение относится к системе определения способности прогноза торможения в соответствии с ограничительной частью независимого пункта формулы изобретения.
Уровень техники
При управлении транспортными средствами большой грузоподъемности, например грузовиками, автобусами и т.п., экономика транспортного средства стала важным фактором при попытке сокращения издержек в предпринимательской деятельности, в которой используется это транспортное средство. После стоимости приобретения транспортного средства наибольшие расходные статьи для транспортного средства состоят из затрат на топливо и затрат на обслуживание. Эти затраты часто связаны, то есть транспортное средство, которое интенсивно используется, потребляет больше топлива и подвергается большему износу с увеличивающимися в результате затратами на обслуживание.
Существующая проблема для компаний, которые используют транспортные средства большой грузоподъемности в своей предпринимательской деятельности, все-таки состоит в том, что сложно установить, насколько велика доля потребления топлива и износа, которая получается, например, от неосторожного вождения, и насколько велика величина, которая получается от неблагоприятной среды дорожного движения, например слишком холмистой местности и/или городской среды.
Износ, которому подвергается транспортное средство во время неосторожного вождения, по меньшей мере частично может быть обусловлен подверганием транспортного средства излишнему количеству ненужных ускорений и замедлений. Соответственно, имеется необходимость оценивать поведение водителя и пытаться улучшить то, как водитель взаимодействует с транспортным средством.
Чтобы определить способность прогноза у водителя, может использоваться устройство типа, раскрытого в международной заявке WO 2007/139493. Здесь используются действия по торможению для определения значения параметра разности, которое сравнивают с эталонным значением параметра. На основании сравнения может определяться способность прогноза у водителя и, например, показываться водителю на дисплее в виде процентного отношения между 0 и 100. Однако не проводится никакой оценки действий.
В заявке на патент WO 2007/133987 описаны система и способ для выявления незначительных событий при вождении. Событие при вождении может быть незначительным событием, если оно касается случаев за пределами контроля водителя, например, проезд по выбоине на дороге, пересечение железнодорожных путей и т.д. Соответственно, эти система и способ предназначены для легкового автомобиля и не включают в себя выявление более сложных событий, имеющих отношение к транспортному средству большой грузоподъемности.
Задача настоящего изобретения заключается в получении улучшенного анализа поведения водителя при управлении транспортным средством, и в последующем содействии водителю для улучшения его/ее способности прогноза в движении, что важно как с точки зрения безопасности дорожного движения, так и для общей экономики транспортного средства.
Раскрытие изобретения
Вышеупомянутая задача достигается с помощью системы определения способности прогноза торможения для транспортного средства, содержащей средство оценки для оценивания способности прогноза торможения у водителя. Оценивание зависит от измеренного времени t между действием по отпусканию педали газа водителем и последующим действием торможения водителя, при этом способность прогноза торможения у водителя определяется в зависимости от результата сравнения времени t и эталонного значения T, представляющего по меньшей мере один параметр окружения транспортного средства, и по меньшей мере одного значения вспомогательного тормоза, представляющего использование вспомогательного тормоза, причем система предоставляет водителю обратную связь о предпочтительном действии торможения.
Вспомогательный тормоз является дополнением к обычным колесным тормозам транспортного средства и конфигурируется для создания тормозящего момента для уменьшения числа оборотов коленчатого вала двигателя. Вспомогательный тормоз может быть, например, тормозом двигателя, моторным тормозом-замедлителем, электромагнитным замедлителем или гидравлическим замедлителем. Вспомогательные тормоза успешно используются с целью поддержания постоянной скорости на спусках и для умеренных замедлений, тогда как обычные колесные тормоза транспортного средства преимущественно используются для мощных и внезапных торможений. При использовании вспомогательных тормозов обычные колесные тормоза, которые обычно представляют фрикционные тормоза с дисковым типом тормоза или барабанным типом тормоза, оберегаются от перегрева со связанным риском отказа тормозов, и их износ уменьшается.
Действие торможения водителя может состоять из использования, например, рабочего тормоза (колесного тормоза) или любого использования вспомогательного тормоза, например замедлителя, тормоза двигателя или моторного тормоза-замедлителя, или сочетания использования тормозов (например, тормоза постоянной скорости).
Предпочтительные варианты осуществления изложены в зависимых пунктах формулы изобретения.
Краткое описание чертежей
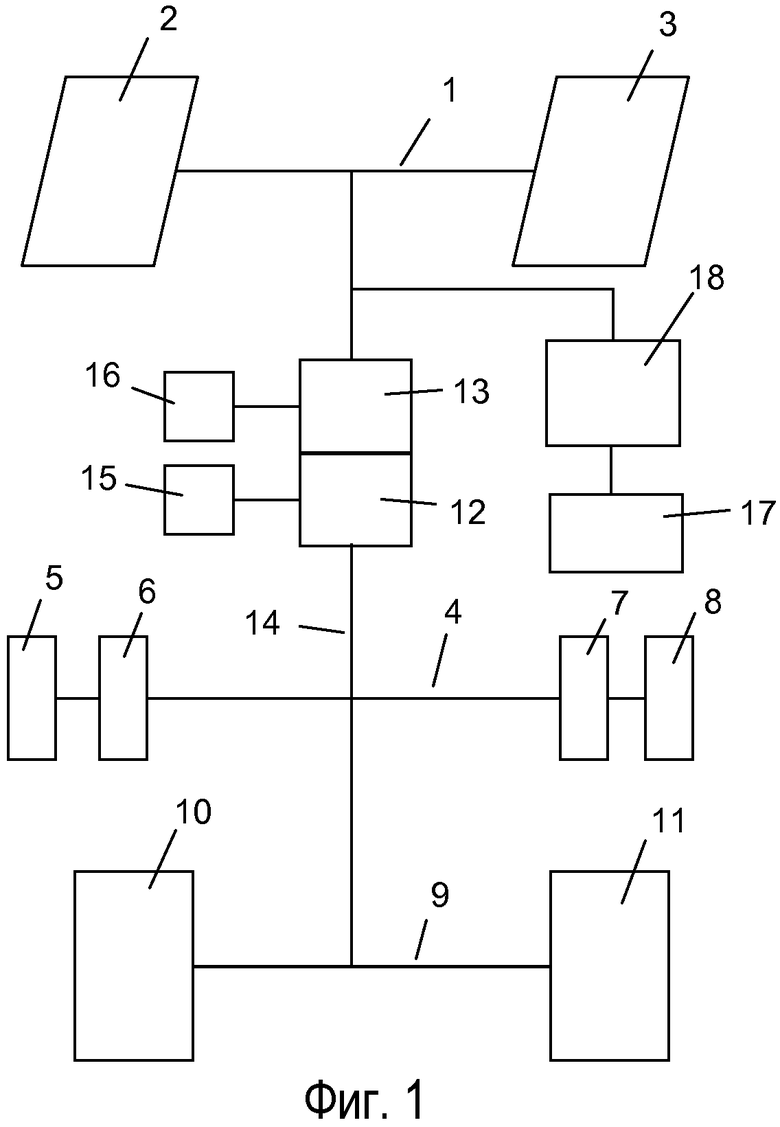
Фиг.1 схематично иллюстрирует систему управления для транспортного средства, где реализуется настоящее изобретение.
Фиг.2 иллюстрирует приведенный в качестве примера способ в соответствии с изобретением.
Подробное описание предпочтительных вариантов
осуществления изобретения
На фиг.1 схематично проиллюстрирована система управления для транспортного средства, с которым может использоваться настоящее изобретение. Транспортное средство содержит передний вал 1 с управляемыми колесами 2, 3, задний приводной вал 4 с ведущими колесами 5-8 и при необходимости задний вал 9 с колесами 10, 11. Кроме того, транспортное средство содержит двигатель 13, соединенный с коробкой 12 передач, который приводит в движение приводной вал 4 посредством выходного вала 14 из коробки передач. Коробка 12 передач и двигатель 13 управляются блоками 15, 16 управления соответственно, которые управляются главным блоком 17 управления. Система 16 управления двигателем (EMS) управляет двигательными функциями транспортного средства, которые могут состоять, например, из впрыска топлива и торможения двигателем. Управление основывается на некотором количестве входных сигналов, которые могут состоять из сигналов от (не показанного) дроссельного регулирования (положение педали акселератора), датчика скорости и системы управления тормозами. Система 15 управления коробкой передач (GMS) управляет функциями передач, где при использовании автоматической коробки передач переключение передач может управляться на основании входного сигнала от датчиков скорости, при ручном переключении передач переключение может управляться по входному сигналу от избирателя механизма переключения передач (рычага переключения передач). Кроме того, транспортное средство содержит систему управления тормозами (BMS) с блоком 17 управления тормозом, который управляет функциями торможения транспортного средства, например автоматическим вычислением нагрузки, чтобы заданное положение педали всегда могло привести к одинаковому тормозящему действию независимо от нагрузки. Блок управления тормозом управляет различными тормозными системами транспортного средства, например, замедлителем и другими вспомогательными тормозными системами, моторным тормозом-замедлителем и рабочим тормозом, и отправляет управляющие сигналы системным модулям (не показаны), рассредоточенным по ходовой части, где электрические управляющие сигналы используются, например, для регулировки тормозного давления.
Вышеописанные блоки управления являются всего лишь примерами того, что может находиться в транспортном средстве. Как понятно специалисту в данной области техники, два или более из вышеописанных блоков управления, конечно, могут быть объединены в один единый блок управления.
В транспортном средстве типа, показанного на фиг.1, как упоминалось выше, крайне желательно, чтобы водитель при управлении транспортным средством был как можно более предсказуем, чтобы избежать ненужных торможений и ускорений, например тех, которые вызваны поддержанием слишком короткого расстояния до впереди идущего транспортного средства, или когда водитель запрашивает ускорение на вершине холма, чтобы затем сразу же затормозить на последующем спуске. Гораздо лучше, с точки зрения износа, а также с точки зрения потребления топлива, если бы водитель в максимальной степени пользовался преимуществами энергии, запасенной в транспортном средстве, и не тратил ее при ненужном использовании тормозов. Однако идеальное управление водителем транспортным средством в разных ситуациях меняется в значительной степени, и сегодня очень сложно узнать, является ли поведение водителя хорошим или плохим, и поэтому также сложно предоставить водителю обратную связь о том, что можно улучшить, вместе с этим владельцу транспортного средства сложно оценить, управляется ли транспортное средство удовлетворительным, то есть экономичным способом.
В международной заявке WO 2007/139493 описано использование устройства для определения способности прогноза у водителя, где измеряется время (или интервал) между двумя последовательными действиями, например завершенным действием по торможению транспортного средства и результатом уверенного воздействия на газ (то есть водитель увеличивает обороты двигателя), или конечным результатом уверенного воздействия на газ (то есть водитель отпускает педаль газа) и последующим действием по торможению транспортного средства. Это измеренное время сравнивается с эталонным значением параметра, представляющим окружение транспортного средства. На основании этого сравнения определяется значение, представляющее способность прогноза у водителя.
Настоящее изобретение относится к системе 18 определения способности прогноза торможения для транспортного средства. Система 18 включает в себя средство оценки для оценки способности прогноза торможения у водителя, например, устройство для определения способности прогноза у водителя, где оценивание зависит от измеренного времени (или интервала) t между действием по отпусканию педали газа водителем и последующим действием торможения водителя. Способность прогноза торможения у водителя определяется в зависимости от результата сравнения времени t и эталонного значения T, представляющего по меньшей мере один параметр окружения транспортного средства, и по меньшей мере одного значения вспомогательного тормоза, представляющего использование вспомогательного тормоза. Настоящее изобретение соответственно относится к системе для расширенной оценки способности прогноза торможения у водителя, когда затрагивается использование вспомогательных тормозов.
На фиг.2 показана блок-схема алгоритма, иллюстрирующая вариант осуществления изобретения. Процесс начинается на этапе 101, где процесс находится до тех пор, пока водитель не запросит положительный крутящий момент двигателя (путем нажатия на педаль акселератора или маневрирования другим типом управления акселератором). Если модуль обработки данных, включенный в систему 18, обнаруживает, что водитель отпускает педаль акселератора (то есть прекращается запрос на крутящий момент двигателя), процесс переходит к этапу 102, где начинается измерение времени или, в качестве альтернативы или дополнения, может начинаться измерение интервала, в силу чего процесс переходит к этапу 103, где определяется, запрашивает ли водитель снова положительный крутящий момент двигателя путем нажатия на педаль акселератора (или маневрирования другим управлением акселератора), или запрашивает ли водитель тормозной момент путем активации любой из тормозных систем транспортного средства, например путем выжимания тормозной педали или маневрирования, например, управлением замедлителя. Модуль обработки данных, включенный в систему 18, может состоять из процессора, который управляется посредством действующих команд, например, компьютерных программ. До тех пор, пока водитель не запрашивает ни крутящий момент двигателя, ни тормозной момент, процесс находится на этапе 103 с активированным измерением времени/интервала. Однако если обнаруживается, что водитель запрашивает ускорение, то процесс переходит к этапу 104, где измерение времени (измерение интервала) останавливается, и полученное время t (и/или интервал s) сбрасывается в ноль, и процесс возвращается к этапу 101. Если обнаруживается, что водитель тормозит, то нужно выполнить некоторые предварительные условия на этапе 105, чтобы перейти к этапу 106, где измерение времени останавливается. Некоторыми предварительными условиями, которые нужно выполнить, например, являются такие, что измеряется значение вспомогательного крутящего момента. После того как остановлено время на этапе 106, процесс переходит к этапу 107, где вычисляется или получается другими способами эталонное значение T, представляющее нужное минимальное время между запросом на ускорение и торможение, и это эталонное значение T определяется на основании текущей дорожной обстановки. Затем на этапе 108 измеренное значение сравнивается с эталонным значением. Если t>T, то поведение водителя считается демонстрирующим хорошую способность к прогнозу. Однако если t<T, то поведение водителя считается демонстрирующим плохую способность к прогнозу. На основании сравнения водителю выдается оценка, и она может быть представлена на средстве представления (этап 109) или отправлена в удаленную систему управления автопарком для дальнейшей оценки и проверки, например, перевозчиками и другими компаниями, которые используют транспортные средства большой грузоподъемности в своей предпринимательской деятельности. Транспортное средство также может быть выполнено с возможностью постоянной передачи данных в удаленный центр мониторинга, в результате чего оценивание может выполняться в центре мониторинга вместо транспортного средства. Обратная связь затем может быть отправлена обратно на транспортное средство для представления водителю.
Длительность эталонного времени T может зависеть от дорожной обстановки. Она может состоять из транспортного потока и скорости транспортного средства. Например, кратчайшее необходимое эталонное время T может быть получено в виде:
 ,
,
где k - постоянная, а f(surroundings) образует функцию окружения и представляет требуемый временной интервал в окружении. При езде по автостраде нужен больший временной интервал по сравнению с городской средой; g(speed) является функцией скорости; g(v)=c1·vb, где c1 и b образуют константы; f(auxiliary_brake) образует функцию, представляющую временную задержку перед тем, как измеряется вспомогательный крутящий момент, когда активируется вспомогательный тормоз.
Система 18 содержит средство для приема сигналов, представляющих положения педали акселератора и положения тормозной педали. Эти сигналы могут состоять из представления фактического положения педалей, которое можно считать с использованием подходящего датчика, или вычисленного "положения" на основании добавленного тормозного момента или запрошенного крутящего момента двигателя, посредством действия, предпринятого водителем. Например, положение управления тормозом, заданное водителем, для некоторой тормозной системы посредством конструкции транспортного средства может быть выполнено с возможностью перевода в электронный сигнал. Система 18 дополнительно может содержать средство для приема сигналов, представляющих управляющие настройки, и посредством этого запрошенного тормозного момента для каждой тормозной системы соответственно, в отношении различных видов активированных водителем систем.
Когда водитель намеревается затормозить транспортное средство с помощью замедлителя, рычаг замедлителя вытягивается в активное положение. Предпочтительно, чтобы система включала в себя средство измерения замедлителя для измерения значения состояния замедлителя, представляющего состояние замедлителя как находящегося в активном или неактивном состоянии. Этот сигнал состояния указывает, например, вытянут ли рычаг замедлителя, и может быть представлен в виде электрического сигнала для системы 18.
Требуется некоторое время между тем, когда водитель вытягивает стержень замедлителя, и тем, когда достигается тормозящее действие, из-за физических свойств замедлителя. Таким образом, система 18 предпочтительно включает в себя средство измерения крутящего момента замедлителя для измерения значения крутящего момента замедлителя, чтобы определить, когда достигается тормозящее действие.
Система 18 вычисляет, как объяснялось выше, время t между действием по отпусканию педали газа водителем и последующим действием торможения водителя. Чтобы быть учтенным в качестве действия торможения водителя, действие торможения водителя в соответствии с одним вариантом осуществления должно включать в себя то, что значение состояния замедлителя находится в активном состоянии и что измеряется значение крутящего момента замедлителя выше некоторой пороговой величины.
В одном варианте осуществления система 18 предоставляет водителю обратную связь о предпочтительном действии по торможению. Эта обратная связь поощряет водителя действовать предпочтительным способом. Например, если водитель использовал замедлитель перед перекрестком, существует вероятность, что водитель забывает вернуть рычаг замедлителя на исходное место, то есть водитель забывает отключить замедлитель. Когда водитель закончил замедление и возвращается к контролю скорости с помощью педали газа, воздействие замедлителя автоматически отключается. Если водитель впоследствии отпускает педаль газа, замедлитель начинает новое замедление. Чтобы избежать этого, система 18 предпочтительно может включать в себя средство измерения времени для измерения значения времени замедлителя. Это значение времени замедлителя начинает измеряться, когда водитель увеличивает обороты двигателя. Если измеряется выход положительного крутящего момента, то есть если водитель увеличивает обороты двигателя, если указанное значение времени замедлителя выше некоторого временного критерия и если значение состояния замедлителя находится в активном состоянии, то водителю предоставляется обратная связь, чтобы тот отключил замедлитель, то есть отпустил рычаг замедлителя. Этот совет соответственно показывается перед тем, как водитель отпустил педаль газа. Если водитель следует совету, то способность к прогнозу водителя не оценивается, потому что водитель "спас" ситуацию.
Способность прогноза торможения у водителя постоянно оценивается и выдается водителю в виде обратной связи. Предпочтительно, чтобы система 18 выдавала обратную связь на средстве представления, но обратная связь также может выдаваться звуковым средством. Данные обратной связи от системы 18 могут непрерывно передаваться в удаленную систему управления автопарком или постоянно показываться водителю транспортного средства. Тенденции водителя могут быть зарегистрированы для дополнительной оценки поведения водителя.
Замедлитель может использоваться вручную водителем для управления скоростью транспортного средства. Он может также быть настроен на автоматическую работу в соответствии с потребностями водителя. Например, в полностью автоматическом режиме очень короткое запрошенное торможение (быстрое касание) на педали рабочего тормоза задействует управление скоростью на спуске, включающее функцию тормоза для поддержания постоянной скорости. Это означает, что моторный тормоз-замедлитель управляется автоматически всякий раз, когда это нужно, в сочетании с замедлителем, чтобы управлять скоростью транспортного средства. Это быстрое касание педали рабочего тормоза не должно влиять на оценку способности прогноза торможения у водителя. В одном варианте осуществления, если активируется тормоз для постоянной скорости, то действие торможения водителя включает в себя то, что измеряется значение крутящего момента вспомогательного тормоза. Соответственно, чтобы быть учтенным как действие торможения водителя, действие торможения водителя должно включать в себя то, что активируется тормоз для постоянной скорости и что измеряется значение крутящего момента замедлителя или моторного тормоза-замедлителя выше некоторой пороговой величины. Система 18 тогда предпочтительно включает в себя средство измерения крутящего момента моторного тормоза-замедлителя для измерения значения крутящего момента моторного тормоза-замедлителя, и средство для определения сигнала состояния постоянной скорости, указывающего, активирована ли постоянная скорость или отключена. Путем сравнения сигнала состояния постоянной скорости с коротким торможением можно зафиксировать намерение активировать управление скоростью на спуске. Этот сигнал состояния может быть представлен в виде электрического сигнала для системы 18.
Вообще, торможение двигателем следует поощрять. Если время t между действием по отпусканию педали газа водителем и последующим действием торможения водителя большое, то выданная оценка водителю должна быть выше, чем обычно, чтобы поощрить водителя за его/ее способность прогноза торможения. Предварительное условие для оценивания торможения двигателем состоит в том, что скорость уменьшается на некоторую величину в течение времени, пока осуществляется торможение двигателем. Требуемое уменьшение скорости, среди прочего, зависит от массы груза и скорости транспортного средства.
На низких скоростях не требуется использовать вспомогательные тормоза, так как нельзя затормозить до остановки с помощью вспомогательных тормозов из-за малого тормозного момента, который вспомогательные тормоза дают на низких скоростях. Таким образом, в одном варианте осуществления предварительное условие для оценивания использования вспомогательных тормозов состоит в том, что максимальный тормозной момент от вспомогательных тормозов превышает некоторую пороговую величину, когда транспортным средством управляют со скоростью ниже некоторой пороговой величины (или когда число оборотов транспортного средства ниже некоторой пороговой величины). Это имеет место, например, когда транспортным средством управляют в веренице автомобилей. Таким образом, не выполняется никакая оценка использования замедлителя, если замедлитель нельзя активировать, потому что скорость транспортного средства ниже некоторой пороговой величины, так как из замедлителя не извлекается никакой энергии торможения. Оценки могут быть показаны в общем представлении на вышеупомянутом средстве представления.
Общая цель - уменьшить использование тормозов в транспортном средстве. Если водитель может избежать торможения, можно сберечь энергию торможения. Соответственно, можно получить отдачу в виде мгновенного потребления топлива в сравнении со средним потреблением, чтобы дополнительно стимулировать водителя ехать более экономично.
Система 18 определения способности прогноза торможения в соответствии с изобретением могла бы использоваться в других ситуациях, например, чтобы оценивать, находится ли водитель в напряженном состоянии, и соответственно оценивать способность прогноза торможения у водителя. Существуют многочисленные способы для установления, находится ли водитель в напряженном состоянии. Можно обнаружить, использует ли водитель очень быстро функции в транспортном средстве, например, быстрое использование рулевого колеса. Другой ситуацией, рассматриваемой как связанной с напряжением, является та, когда транспортное средство подвергается сильному поперечному ускорению (обычно при вождении на круговых развязках), или когда водитель активирует проблесковые указатели. Если обнаруживается, что водитель находится в напряженном состоянии, то в соответствии с одним вариантом осуществления оценивается способность прогноза торможения у водителя, но не предоставляется никакой обратной связи касательно рекомендации о предпочтительных действиях торможения в течение периода напряжения.
Настоящее изобретение не ограничивается вышеописанными предпочтительными вариантами осуществления. Могут использоваться различные альтернативы, модификации и эквиваленты. Поэтому вышеприведенные варианты осуществления не следует воспринимать как ограничивающие объем изобретения, который определяется приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗНАЯ СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2009 |
|
RU2471240C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СПОСОБНОСТИ К ПРЕДВИДЕНИЮ У ВОДИТЕЛЯ | 2007 |
|
RU2449375C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ИЗНОСА ТОРМОЗОВ | 2007 |
|
RU2433481C2 |
| УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ ОБ УКЛОНЕ | 2009 |
|
RU2477690C2 |
| СИСТЕМА ОБРАТНОЙ СВЯЗИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОРОБКЕ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2482361C2 |
| СПОСОБ И СИСТЕМА ОЦЕНКИ ПОВЕДЕНИЯ ТОРМОЖЕНИЯ ВОДИТЕЛЯ | 2011 |
|
RU2561400C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЖИМА РАСХОДА ТОПЛИВА | 2007 |
|
RU2436163C2 |
| ОЦЕНКА СТИЛЯ ВОЖДЕНИЯ АВТОМОБИЛЕЙ, ОРИЕНТИРОВАННОГО НА ЭКОНОМИЮ ТОПЛИВА | 2012 |
|
RU2616487C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ФУНКЦИИ СВОБОДНОГО ХОДА АВТОМОБИЛЯ | 2006 |
|
RU2415039C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕДУЩИМИ КОЛЕСАМИ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2015 |
|
RU2684815C2 |
Изобретение относится к системам контроля и испытания тормозных систем и предназначено для определения способности прогноза торможения. Система определения прогноза торможения для транспортного средства содержит средства оценки для оценивания способности прогноза торможения у водителя. Способность прогноза торможения у водителя определяется в зависимости от сравнения времени t между действием по отпусканию педали газа и последующим действием торможения водителя и эталонного значения Т, представляющего параметр окружения транспортного средства и значение вспомогательного тормоза. Система предоставляет водителю обратную связь о предпочтительном действии торможения. Достигается определение способности торможения у водителя. 9 з.п. ф-лы, 2 ил.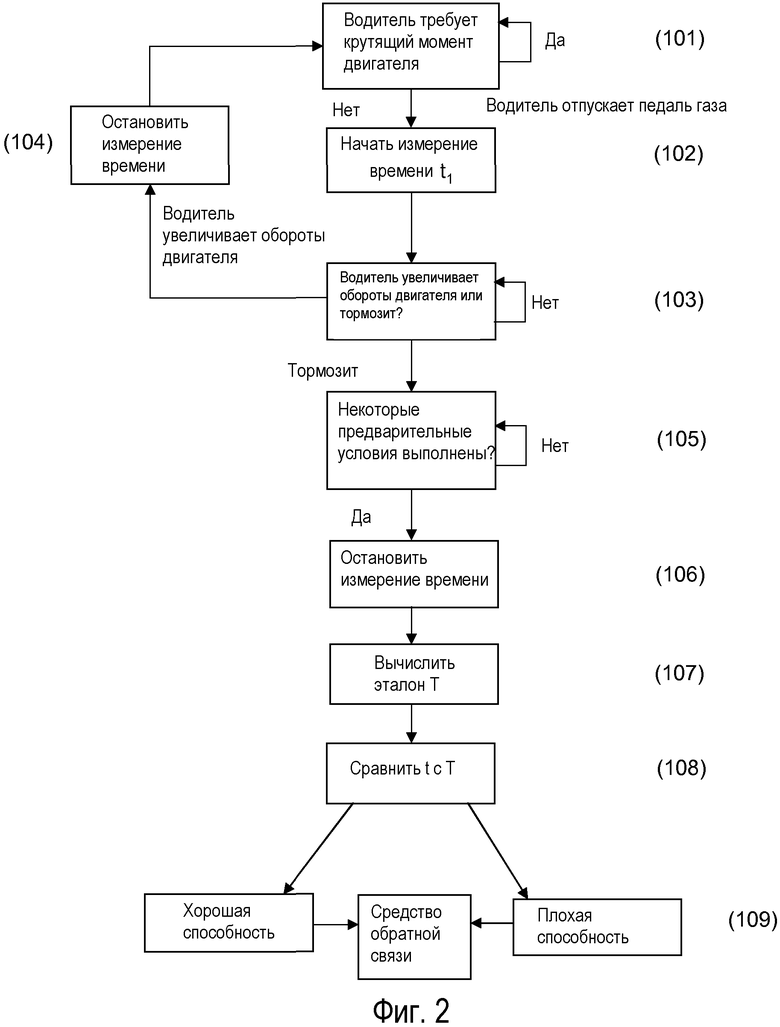
1. Система определения способности прогноза торможения для транспортного средства, содержащая: средство оценки для оценивания способности прогноза торможения у водителя, при этом оценивание зависит от измеренного времени t между действием по отпусканию педали газа водителем и последующим действием торможения водителя, отличающаяся тем, что способность прогноза торможения у водителя определяется в зависимости от результата сравнения указанного времени t и эталонного значения Т, представляющего по меньшей мере один параметр окружения транспортного средства, и по меньшей мере одного значения вспомогательного тормоза, представляющего использование вспомогательного тормоза, причем система предоставляет водителю обратную связь о предпочтительном действии торможения.
2. Система по п.1, дополнительно содержащая средство измерения замедлителя для измерения значения состояния замедлителя, представляющего состояние замедлителя как находящегося в активном или неактивном состоянии.
3. Система по п.1, дополнительно содержащая средство измерения крутящего момента замедлителя для измерения значения крутящего момента замедлителя.
4. Система по п.1, дополнительно содержащая средство измерения крутящего момента моторного тормоза-замедлителя для измерения значения крутящего момента моторного тормоза-замедлителя.
5. Система по п.2 или 3, в которой действие торможения водителя содержит то, что значение состояния замедлителя находится в активном состоянии, и измеряется значение крутящего момента замедлителя выше некоторой пороговой величины.
6. Система по п.5, дополнительно содержащая средство измерения времени для измерения значения времени замедлителя, и если значение состояния замедлителя находится в активном состоянии, если измеряется выход положительного крутящего момента, то есть если водитель увеличивает обороты двигателя, и если значение времени замедлителя выше некоторого временного критерия, то водителю предоставляется обратная связь, чтобы он отпустил замедлитель.
7. Система по п.3 или 4, в которой, если активируется тормоз для постоянной скорости, то действие торможения водителя содержит то, что измеряется значение крутящего момента вспомогательного тормоза выше некоторой пороговой величины.
8. Система по п.1, в которой способность прогноза торможения у водителя постоянно оценивается и предоставляется водителю в виде обратной связи.
9. Система по п.1, в которой система предоставляет обратную связь на средстве представления.
10. Транспортное средство, содержащее систему определения способности прогноза торможения по любому из пп.1-9.
| WO 2007139494 A1, 06.12.2007 | |||
| WO 2007140232 A2, 06.12.2007 | |||
| US 6092021 A, 18.07.2000 | |||
| WO 2007139493 A1, 06.12.2007 | |||
| US 20030191573 A1, 09.10.2003 | |||
| Устройство для управления электродинамическим тормозомзамедлителем транспортного средства | 1976 |
|
SU682993A1 |
| RU 94022029 A1, 27.06.1996. | |||

