ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу и системе для оценки поведения торможения водителя, согласно родовым понятиям независимых пунктов.
Уровень техники для изобретения
В движущихся тяжелых транспортных средствах, таких как грузовые автомобили, автобусы и подобное, экономия в отношении транспортных средств стала важным фактором в попытке уменьшить стоимость деятельности, для которой транспортное средство используется. После его стоимости приобретения наибольшие расходы на транспортное средство - это топливо и стоимость обслуживания. Эти стоимости часто являются связанными, т.е. транспортное средство, которое много используется, не только потребляет больше топлива, но также подвержено большему износу, следовательно, имеет более высокую стоимость обслуживания.
На потребление топлива и износ в значительной степени влияет стиль вождения. Не является редким, что различие между водителями в отношении потребления топлива транспортным средством составляет более чем 10%. Трудность найма способных водителей делает обучение привлекательным решением. Проблема с любым обучением, однако, состоит в том, что его эффекты могут постепенно исчезать со временем, и после некоторых месяцев поведение водителя может возвращаться назад к тому же уровню, что был до обучения.
Другой проблемой является распознавание того, какая величина потребления топлива и износа проистекает от неосторожного вождения и какая от неблагоприятных транспортных условий, например чрезвычайно холмистых дорог и/или городского движения.
Неосторожное вождение имеет результатом главным образом износ тормозной системы транспортного средства. Тяжелое транспортное средство часто имеет некоторое количество разных тормозных систем, например рабочий тормоз (ножной тормоз), моторный тормоз-замедлитель, тормоз-замедлитель в выпускной системе двигателя, ретардер и другие типы вспомогательных тормозов. Использование вспомогательных тормозов является, в общем, предпочтительным в том, что это обычно менее тяжело для транспортного средства. Посредством использования вспомогательных тормозов на тяжелых транспортных средствах водитель может уменьшать износ на тормозные накладки, тормозные диски и т.д., которые связаны с использованием колесных тормозов. Если, например, рабочий тормоз используется одиночно, когда тяжело нагруженное транспортное средство находится в длительном движении на спуске, это может иметь бедственные последствия вследствие перегретых тормозных барабанов и/или тормозных накладок. Использование вспомогательных тормозов должно, поэтому, поощряться с целью, чтобы водители использовали их более часто.
Не все транспортные средства оснащаются всеми из вспомогательных тормозов, которые являются доступными. Например, гидравлический ретардер не всегда устанавливается по причине его стоимости. В противоположность тормоз-замедлитель в выпускной системе двигателя, который также является вспомогательным тормозом, является, в общем, доступным на тяжелом транспортном средстве. Однако проблема в оценке использования водителем тормоза-замедлителя в выпускной системе двигателя и поощрение его/ее использовать его состоит в том, что его использование является незаконным во многих странах, часто в некоторые времена в течение 24 часов, так как он является очень шумным. Также является трудным оценивать силу торможения, которая может ожидаться от тормоза-замедлителя в выпускной системе двигателя в разных ситуациях вождения.
WO 2007/139494 описывает устройство для определения способности водителя выбирать тормозную систему. Его/ее использование тормозной системы сравнивается с его/ее полным использованием тормозных систем в течение операции торможения, чтобы оценивать его/ее способность использовать тормозную систему. Полное использование системы измеряется в терминах потребленной энергии или использования системы.
EP 1811481 описывает способ и систему для наблюдения и анализа стиля вождения водителя. Различные параметры, такие как частота вращения двигателя, скорость транспортного средства, выбор передачи и т.д., наблюдаются и используются, чтобы создавать профиль водителя, представляющий его/его стиль вождения.
Задачей изобретения является достижение усовершенствованного способа для оценки способности водителя тормозить таким способом, что износ и потребление топлива минимизируются, и, в частности, поощрять его/ее водить таким способом, что износ и потребление топлива минимизируются.
Сущность изобретения
Задача, описанная выше, достигается посредством способа для оценки поведения торможения водителя. Способ содержит: определение, когда тормозной цикл начинается; определение времени tengbrake того, когда моторный тормоз-замедлитель транспортного средства используется в течение тормозного цикла; определение времени tshift, потраченного, чтобы задействовать передачу в течение тормозного цикла; определение, когда тормозной цикл оканчивается; определение полного времени ttotal для упомянутого тормозного цикла; обработку ttotal и tengbrake по отношению к tshift согласно предварительно определенным правилам и вычисление значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal, при этом правила требуют, чтобы если tshift больше, чем tshiftmax, которое является настраиваемым максимальным допустимым временем для изменения передачи, то ttotal обрабатывалось на основе того, что ttotal = ttotal + tsample, где tsample является предварительно определенным периодом времени, и вычисленное значение оценки торможения BA представляется водителю.
Согласно другому аспекту, задача достигается посредством системы для оценки поведения торможения водителя. Система содержит: устройство управления, соединенное с первым измерительным блоком, адаптированным для определения того, когда тормозной цикл начинается; вторым измерительным блоком, соединенным с устройством управления и адаптированным для определения времени tengbrake того, когда моторный тормоз-замедлитель транспортного средства используется в течение тормозного цикла, и для доставки на этой основе второго временного сигнала, содержащего tengbrake; третьим измерительным блоком, соединенным с устройством управления и адаптированным для определения времени tshift, потраченного, чтобы задействовать передачу в течение тормозного цикла, и для доставки на этой основе третьего временного сигнала, содержащего tshift; при этом первый измерительный блок адаптирован для определения того, когда тормозной цикл оканчивается, определения полного времени ttotal для упомянутого тормозного цикла и доставки в устройство управления на этой основе первого временного сигнала, содержащего ttotal, при этом устройство управления дополнительно адаптировано для обработки ttotal и tengbrake по отношению к tshift согласно предварительно определенным правилам, и для вычисления значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal, при этом правила требуют, чтобы если tshift больше, чем tshiftmax, которое является настраиваемым максимальным допустимым временем для изменения передачи, то ttotal обрабатывалось на основе того, что ttotal = ttotal + tsample, где tsample является предварительно определенным периодом времени, и вычисленное значение оценки торможения BA представляется водителю.
Способ и система обеспечивают способ оценки способности водителя тормозить таким способом, что износ и потребление топлива минимизируются. Этот тип оценки того, как водитель тормозит, является очень общим и может применяться на многих типах транспортных средств, например грузовых автомобилях, автобусах, пассажирских автомобилях, без существенных требований на то, как транспортное средство оснащено.
Согласно одному варианту осуществления, водитель может принимать прямую обратную связь относительно его/ее поведения торможения и может затем исправлять поведение, которое имеет неблагоприятные относящиеся к окружающей обстановке и экономические эффекты. Посредством постоянных напоминаний о требуемом стиле вождения водитель также может поддерживать и улучшать его/ее функционирование между временами обучения.
Поведение водителя также может количественно оцениваться, что является положительным способом поощрять соревнование и стремление. Это также может давать для него/нее удовольствие от работы наряду с тем, что в то же время его/ее стиль вождения улучшается.
Предпочтительные варианты осуществления описываются в зависимых пунктах формулы изобретения и подробном описании.
Краткое описание прилагаемых чертежей
Изобретение описывается ниже со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 схематически иллюстрирует систему оценки согласно одному варианту осуществления изобретения.
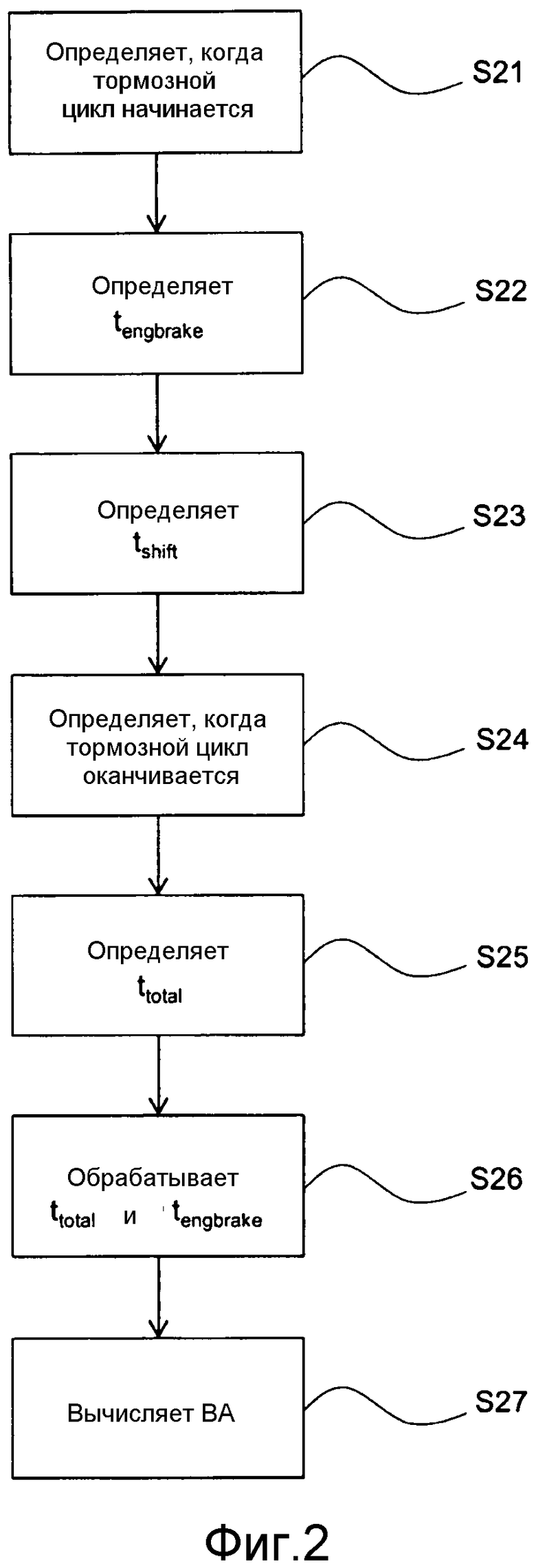
Фиг.2 является блок-схемой последовательности операций способа оценки согласно одному варианту осуществления изобретения.
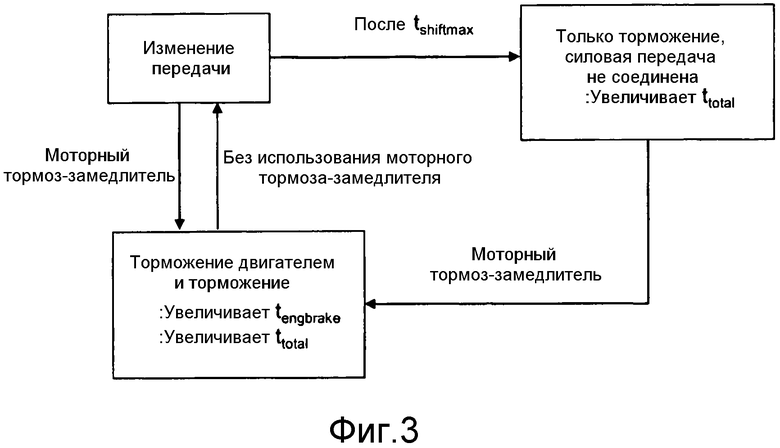
Фиг.3 является блок-схемой последовательности операций способа оценки согласно другому варианту осуществления изобретения.
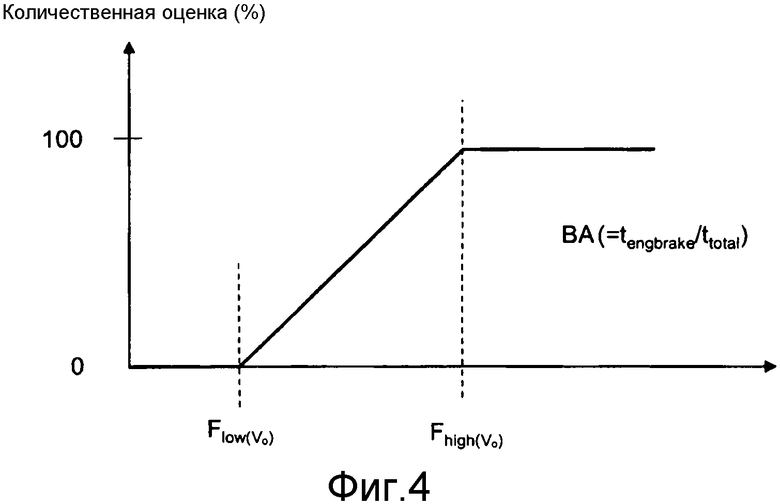
Фиг.4 иллюстрирует количественную оценку для BA на фиг.2.
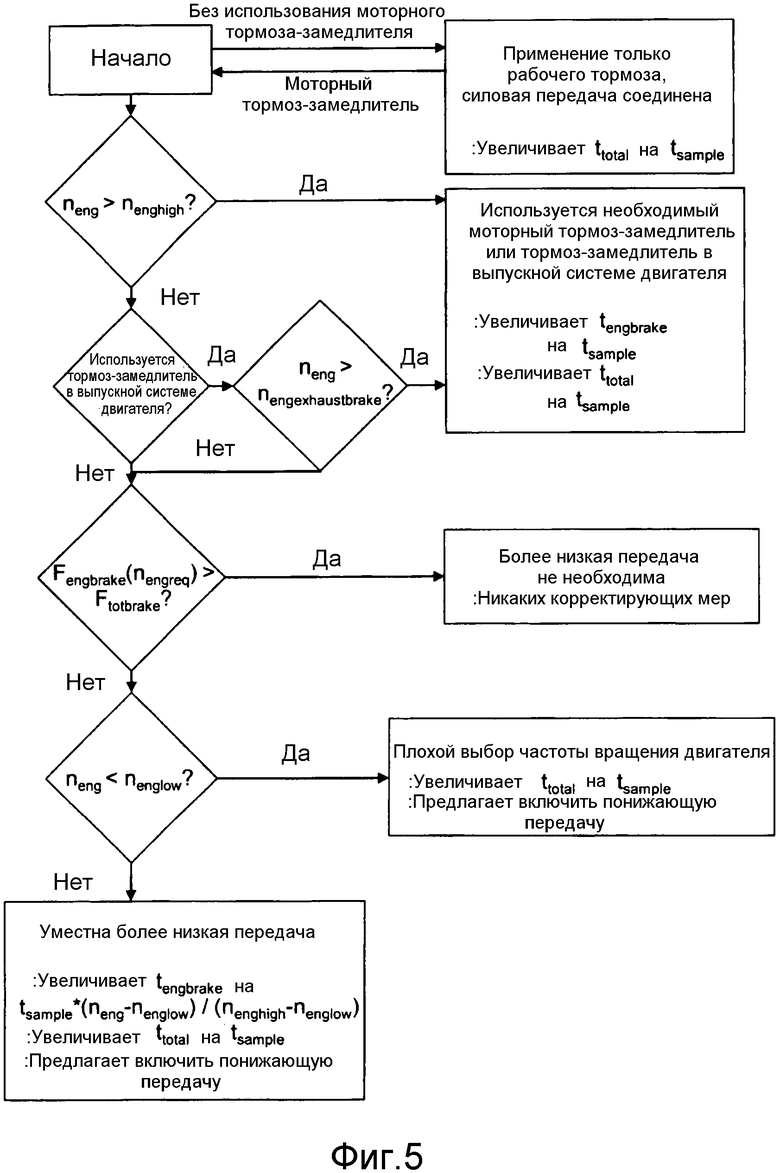
Фиг.5 является блок-схемой последовательности операций способа оценки согласно дополнительному варианту осуществления изобретения.
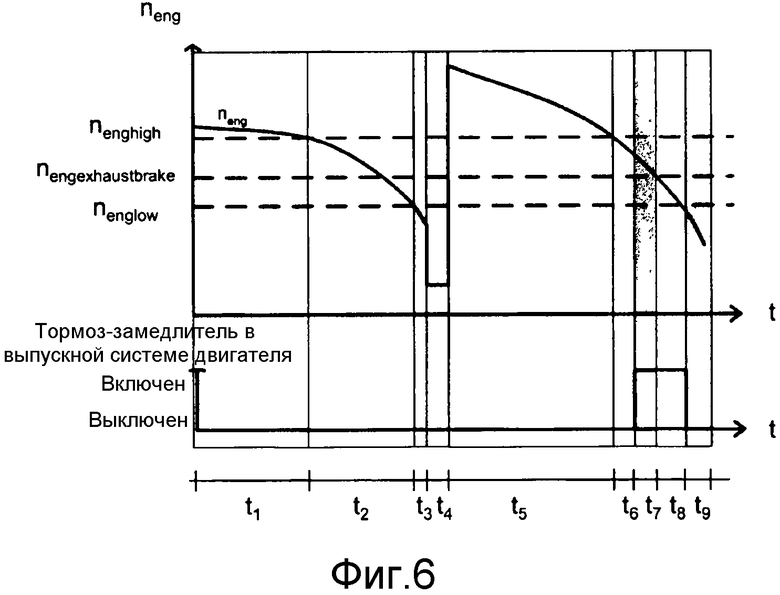
Фиг.6 изображает пример того, как частота вращения двигателя neng изменяется на спуске.
Подробное описание предпочтительных вариантов осуществления изобретения
Фиг.1 схематически изображает систему для оценки поведения торможения водителя согласно одному варианту осуществления изобретения. Система содержит устройство управления, предпочтительно обеспеченное блоком процессора для выполнения вычислений и т.д. и по меньшей мере одной памятью. Блок управления соединяется с некоторым количеством измерительных блоков, адаптированных для определения разных переменных. Первый измерительный блок адаптирован для определения того, когда тормозной цикл начинается и кончается, определения полного времени ttotal для тормозного цикла и доставки в устройство управления на этой основе первого временного сигнала, содержащего ttotal. В зависимости от ситуации, подлежащей оценке, первый измерительный блок адаптирован для наблюдения и вычисления различных параметров и сигналов, таких как скорость транспортного средства, ускорение, сопротивление движению и т.д., чтобы определять, когда тормозной цикл начинается и кончается. Фиг.1 иллюстрирует это схематически в форме стрелки, указывающей на первый измерительный блок. Второй измерительный блок, соединенный с блоком управления, адаптирован для определения времени tengbrake того, когда моторный тормоз-замедлитель транспортного средства используется в течение тормозного цикла, и для доставки на этой основе второго временного сигнала, содержащего tengbrake. Согласно одному варианту осуществления, входные сигналы во второй измерительный блок являются аналогичными сигналам в первый измерительный блок. Третий измерительный блок адаптирован для определения времени tshift для изменений передачи в течение тормозного цикла и для доставки на этой основе третьего временного сигнала, содержащего tshift. Третий измерительный блок затем принимает, например, информацию от системы передачи в транспортном средстве относительно того, когда и какие передачи используются. Блок управления адаптирован для обработки ttotal и tengbrake по отношению к tshift согласно предварительно определенным правилам и для вычисления значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal. Согласно одному варианту осуществления, описанные измерительные блоки являются функциональными блоками, которые могут включаться в блок управления.
Блок управления предпочтительно содержит блок процессора, адаптированный для выполнения вычислений и т.д., и по меньшей мере одну память.
Согласно одному варианту осуществления, вычисленное значение оценки торможения BA представляется для водителя на дисплее. Значение BA может, например, выражаться в форме числового значения или в форме символов. Значение BA также может обеспечиваться в виде обратной связи водителю акустически. Согласно одному варианту осуществления, значение BA может сохраняться в памяти в блоке управления или посылаться в центральный блок, внешний для транспортного средства, для дополнительного анализа.
Согласно одному варианту осуществления, система содержит четвертый измерительный блок, адаптированный для определения частоты вращения двигателя neng в течение тормозного цикла. Измерительный блок, таким образом, адаптирован для приема сигналов от двигателя, которые показывают его частоту. Четвертый измерительный блок проиллюстрирован на фиг.1. В этом варианте осуществления блок управления адаптирован для обработки ttotal и tengbrake по отношению к tshift и neng согласно предварительно определенным правилам и для вычисления значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal. Использование водителем корректной передачи для ситуации может таким образом оцениваться и он/она может обеспечиваться обратной связью относительно его/ее выбора передач.
Изобретение также относится к способу для оценки поведения торможения водителя. Способ объясняется ниже со ссылкой на блок-схему последовательности операций на фиг.2. Первый этап S21 определяет, когда тормозной цикл начинается. Это может изменяться в зависимости от конкретной ситуации торможения, подлежащей оценке, как будет объясняться ниже. Второй этап S22 определяет время tengbrake того, когда моторный тормоз-замедлитель транспортного средства используется в течение тормозного цикла. Третий этап S23 определяет время tshift для изменений передачи в течение тормозного цикла. Четвертый этап S24 определяет то, когда тормозной цикл оканчивается, что, как на этапе S21, может изменяться в разных ситуациях. Пятый этап S25 определяет полное время ttotal для тормозного цикла, и шестой этап S26 обрабатывает ttotal и tengbrake по отношению к tshift согласно предварительно определенным правилам. Седьмой этап S27 вычисляет значение оценки торможения BA на основе обработанных значений для tengbrake и ttotal.
Согласно одному варианту осуществления, BA вычисляется на основе того, что BA = tengbrake/ttotal. Результат является значением BA между 0 и 1, и процентное отношение времени использования моторного тормоза-замедлителя может вычисляться, как изображено на фиг.4.
Тормозной цикл может начинаться разными способами в зависимости от ситуации, в которой транспортное средство находится в конкретное время. Мы описываем ниже некоторое количество ситуаций торможения, в которых водитель может активно предпринимать корректирующие меры, чтобы уменьшать износ транспортного средства и также потребление топлива, и то, как эти меры могут обнаруживаться и оцениваться.
Ситуация A
В этой ситуации водитель активно тормозит, чтобы понижать скорость транспортного средства. Квалифицированный водитель последовательно включает понижающие передачи, чтобы вносить столько усилия моторного тормоза-замедлителя, сколько возможно, и также, чтобы избегать того, чтобы двигателю приходилось быть в холостом состоянии в течение торможения, что будет отражаться на стоимости топлива. И также коробка передач транспортного средства не должна помещаться в нейтральное состояние в течение торможения, кроме как при очень низких скоростях транспортного средства.
Обнаружение и оценка поведения торможения водителя в ситуации A включает в себя использование системы, описанной со ссылкой на фиг.1, и способа, описанного со ссылкой на фиг.2. Тормозной цикл начинается, например, когда водитель начинает тормозить после периода вождения, в течение которого скорость транспортного средства не понижалась на более чем предварительно определенное пороговое значение. Тормозной цикл рассматривается как оконченный, когда водитель осуществляет ускорение или скорость транспортного средства ниже заданного порогового значения. Определяется время tengbrake того, когда используется моторный тормоз-замедлитель, и когда, например, имеется использование сцепления, задается допустимое время для изменения передачи. Согласно одному варианту осуществления, правила затем требуют, чтобы если tshift больше, чем tshiftmax, которое является настраиваемым максимальным допустимым временем для изменения передачи, то ttotal обрабатывалось на основе того, что ttotal = ttotal + tsample, где tsample является предварительно определенным периодом времени. Это иллюстрируется на фиг.3. Когда транспортное средство тормозится посредством моторного тормоза-замедлителя, tengbrake и ttotal увеличиваются на tsample. Когда транспортное средство изменяет передачу, tengbrake и ttotal не увеличиваются до тех пор, пока пройдет максимальное время tshiftmax для изменения передачи. Если максимальное время прошло, но еще никакая передача не была задействована, то только ttotal увеличивается на tsample. Это повторяется до тех пор, пока некоторая передача задействуется или тормозной цикл окончится.
Согласно одному варианту осуществления, чтобы оценить торможение полностью, требуется некоторое полное время торможения ttotal, которое может зависеть от скорости транспортного средства.
Водителю предпочтительно дается значение BA в форме количественной оценки на основе времени tengbrake того, когда моторный тормоз-замедлитель использовался, относительно полного времени торможения ttotal, как проиллюстрировано на фиг.4. Ожидаемая пропорция использования моторного тормоза-замедлителя, т.е. значение BA, может зависеть от скорости транспортного средства. Фиг.4 показывает пределы значения BA как Flow(v0) и Fhigh(v0), т.е. пределы для силы моторного тормоза-замедлителя при некоторой скорости v0 транспортного средства. Когда производится оценка функционирования водителя, это отображается ему/ей, например, в форме символов и/или значений количественной оценки. Если обнаруживается конкретное поведение, например, водитель разъединил сцепление и затормозил при высоких скоростях транспортного средства, ему/ей может предоставляться рекомендация на дисплее, которая поощряет его/ее не использовать сцепление, но вместо этого использовать моторный тормоз-замедлитель.
Водитель количественно оценивается как хорошо, когда скорость транспортного средства понижается, когда он/она делает последовательные включения понижающей передачи, имея результатом отсутствие необходимости во впрыске топлива и меньший износ на рабочих тормозах. Согласно одному варианту осуществления, также учитывается, используется ли тормоз-замедлитель в выпускной системе двигателя транспортного средства, с последовательным положительным влиянием на количественную оценку способа торможения водителя.
Ситуация B
В этой ситуации водитель желает поддерживать скорость транспортного средства на спуске и поэтому обеспечивать, что она не увеличивается. Квалифицированный водитель будет заботиться, чтобы включать понижающую передачу и поддерживать более высокую частоту вращения двигателя, что помогает уменьшать износ на тормозах. Использование тормоза-замедлителя в выпускной системе двигателя также является предпочтительным в этих ситуациях. Первоначальное рассмотрение состоит в том, чтобы уменьшать износ на рабочих тормозах, но также, чтобы уменьшать риск перегревания тормозов, что может приводить к отказу.
Обнаружение и оценка поведения торможения водителя в ситуации B включает в себя применение способа, объясненного со ссылкой на фиг.2, с некоторыми дополнительными этапами способа, проиллюстрированными на фиг.5.
Тормозной цикл начинается, например, когда транспортное средство начинает движение на спуске. Имеется много способов обнаружения движений на спуске. Одно состоит в том, чтобы вычислять сопротивление движению транспортного средства на основе ожидаемого ускорения при некоторой эффективной мощности двигателя. Все внешние силы, действующие на транспортное средство, могут тогда комбинироваться как сопротивление движению, включая сюда среди прочего силу тяжести, сопротивление качению и сопротивление воздуха. Тормозной цикл рассматривается как оконченный, когда водитель осуществляет ускорение или скорость транспортного средства ниже заданного порогового значения, или сопротивление движению ниже некоторого значения.
Выбор передачи водителем анализируется в течение тормозного цикла, и вычисляются два момента времени tengbrake и ttotal. Согласно фиг.5, ttotal увеличивается на tsample, когда не имеется использования моторного тормоза-замедлителя, т.е. когда никакая передача не задействуется. Предпочтительно здесь допускается некоторое время tshiftmax для изменения передачи, как в ситуации A. Согласно одному варианту осуществления, когда тормозной цикл начался и транспортное средство осуществляет торможение двигателем, в течение тормозного цикла определяется частота вращения двигателя neng. ttotal и tengbrake затем обрабатываются по отношению к tshift и neng согласно предварительно определенным правилам, и значение оценки торможения BA вычисляется на основе обработанных значений для tengbrake и ttotal. Оценка, таким образом, принимает в рассмотрение скорость двигателя и также то, сколько времени у водителя занимает изменить передачу.
Согласно одному варианту осуществления, упомянутые предварительно определенные правила требуют сравнения neng с предельными значениями nenghigh и nenglow для частоты вращения двигателя, при этом nenghigh является верхним предельным значением и nenglow нижним предельным значением. Это обеспечивает способ оценки выбора водителем передачи.
Согласно другому варианту осуществления, правила требуют, чтобы если neng больше, чем nenghigh, то ttotal обрабатывалось на основе того, что ttotal = ttotal + tsample, и tengbrake - на основе того, что tengbrake = tengbrake + tsample. Водитель затем оценивается как задействовавший корректную передачу для ситуации с необходимым использованием моторного тормоза-замедлителя.
Согласно одному варианту осуществления, если neng меньше, чем или равно nenghigh, делается проверка, чтобы увидеть, использует ли водитель тормоз-замедлитель в выпускной системе двигателя в течение тормозного цикла. Если это так и если neng больше, чем nengexhaustbrake, то ttotal обрабатывается на основе того, что ttotal = ttotal + tsample, и tengbrake - на основе того, что tengbrake = tengbrake + tsample, где nengexhaustbrake является предельным значением частоты вращения двигателя, относящимся к тормозу-замедлителю в выпускной системе двигателя. Если блок управления принимает сигнал относительно того, что тормоз-замедлитель в выпускной системе двигателя транспортного средства использовался в течение тормозного цикла и neng больше, чем nengexhaustbrake, то ttotal обрабатывается на основе того, что ttotal = ttotal + tsample, и tengbrake - на основе того, что tengbrake = tengbrake + tsample. Это делает возможным также оценивать использование водителем тормоза-замедлителя в выпускной системе двигателя в течение тормозного цикла.
Соответственно, согласно одному варианту осуществления, если neng больше, чем nenglow и меньше, чем nenghigh, то ttotal обрабатывается на основе того, что ttotal = ttotal + tsample, и tengbrake - на основе того, что tengbrake = tengbrake + tsample (neng - nenglow)/(nenghigh - nenglow). Водитель, таким образом, тормозит двигателем, но выбор передачи не является наилучшим для ситуации. Поэтому является уместным включение понижающей передачи, и согласно одному варианту осуществления это предлагается водителю на дисплее. Подходящая передача может затем вычисляться и предлагаться.
Если полная сила моторного тормоза-замедлителя Fengbrake при рекомендованной частоте вращения двигателя nengreq больше, чем комбинированная сила торможения Ftotbrake, то никакая более низкая передача не требуется и никакая корректирующая мера не предпринимается, так как водителю не следует рекомендовать тормозить больше, чем необходимо. Торможение больше, чем необходимо является конечно ненужным и в конечном счете стоит топлива. Комбинированная сила торможения Ftotbrake, поэтому, включает в себя рабочие тормоза. Рекомендованная частота вращения двигателя nengreq является пороговым значением, которое представляет, например, наименьшую частоту вращения двигателя, требуемую, чтобы активно понижать скорость транспортного средства в течение торможения двигателем.
Согласно одному варианту осуществления, если полная сила моторного тормоза-замедлителя Fengbrake при рекомендованной частоте вращения двигателя nengreq меньше, чем или равна комбинированной силе торможения Ftotbrake, и/или если neng меньше, чем или равна nenglow, то ttotal обрабатывается на основе того, что ttotal = ttotal + tsample, где tsample является, как упомянуто ранее, предварительно определенным периодом времени. Предпочтительно водителю затем предлагается включение понижающей передачи. Здесь снова может вычисляться и предлагаться подходящая передача.
Фиг.6 изображает пример того, как частота вращения двигателя neng изменяется в течение периода времени t, когда водитель желает поддерживать одну и ту же скорость транспортного средства при движении на спуске, т.е. ситуации B. Диаграмма также показывает, когда тормоз-замедлитель в выпускной системе двигателя транспортного средства включен или выключен в течение одного и того же периода времени. Таблица 1 показывает то, как ttotal и tengbrake будут вычисляться, в зависимости среди прочего от выбора передачи водителем в течение периода t.
tengbrake=tengbrake+tsample
tengbrake=tsample*(neng-nenglow)/(nenghigh-nenglow)
tengbrake=tengbrake+tsample
tengbrake=tsample*(neng-nenglow)/(nenghigh-nenglow)
tengbrake=tengbrake+tsample
Торможение двигателем - частота вращения двигателя меньше, чем nenghigh, но больше, чем nenglow
tengbrake=tsample*(neng-nenglow)/(nenghigh-nenglow)
Согласно одному варианту осуществления, tsample равняется соответствующим периодам t1 по t9 в различных ситуациях выше.
После операции торможения функционирование водителя количественно оценивается таким же способом, как в ситуации A, но возможно с другими параметрами, как на фиг.4. Также впоследствии водителю могут даваться указания относительно того, как он/она может управляться с аналогичной ситуацией в следующий раз.
Ситуация C
В этой ситуации водитель желает ехать без использования привода, следовательно, без ускорения и без торможения. Это может, например, возникать при спокойном движении на спуске, в этом случае передача также должна задействоваться вместо того, чтобы отпустить педаль сцепления или использовать нейтральную передачу. Имеется несколько причин для этого. Например, без задействованной передачи двигатель будет находиться в холостом состоянии, вызывая потребление топлива. Имеется часто большой риск, что может иметься необходимость тормозить дополнительную энергию, приобретенную посредством езды без использования привода.
Обнаружение и оценка ситуации C включает в себя применение способа и системы, описанных со ссылкой на фиг.1 и 2. Согласно одному варианту осуществления, тормозной цикл начинается, когда сопротивление движению вычисляется при некотором значении, которое показывает, что транспортное средство начинает спокойное движение на спуске. Тормозной цикл рассматривается как оконченный, когда водитель осуществляет ускорение или скорость транспортного средства ниже заданного порогового значения, или сопротивление движению ниже некоторого значения.
Согласно одному варианту осуществления, система адаптирована для приема информации о и обслуживания приходящей дорожной ситуации. Эта информация может, например, приниматься посредством радиосообщений, содержащих информацию о местоположении дорожной ситуации. Водитель может, таким образом, делаться знающим о дорожных ситуациях, в которых скорость транспортного средства должна понижаться, например дорожно-транспортное происшествие или очередь, и может адаптировать скорость транспортного средства соответственно. Информация о приходящей дорожной ситуации также может приниматься посредством картографических данных о маршруте и местоположения транспортного средства. Местоположение транспортного средства может, например, приниматься посредством блока GPS в транспортном средстве. Водитель может, таким образом, делаться знающим о дорожных ситуациях, в которых скорость транспортного средства должна понижаться, например участок дороги с круговым движением, пересечение и т.д., и может адаптировать скорость транспортного средства соответственно. Дополнительным примером дорожной ситуации является ограничение скорости, требующее от водителя понизить скорость транспортного средства.
Водитель предпочтительно поощряется использовать моторный тормоз-замедлитель, чтобы понижать или адаптировать скорость транспортного средства до приходящей дорожной ситуации. Согласно одному варианту осуществления там, где водитель использует только моторный тормоз-замедлитель в течение тормозного цикла, чтобы понижать скорость транспортного средства, это награждается посредством максимального значения оценки торможения BA, и указание поощрения представляется ему/ей посредством дисплея. Водителю предпочтительно дается количественная оценка на основе времени tengbrake того, когда моторный тормоз-замедлитель использовался, относительно полного времени торможения ttotal, как проиллюстрировано на фиг.4. Ожидаемая пропорция использования моторного тормоза-замедлителя может зависеть от скорости транспортного средства. Там, где транспортное средство превосходит некоторую скорость при отсутствии задействованной передачи, водителю предпочтительно дается указание посредством дисплея, чтобы поощрять его/ее задействовать передачу или освобождать педаль сцепления. В этом случае ему/ей предпочтительно также дается некоторое время tshiftmax, чтобы изменить передачу, как в ситуациях A и B. Там, где передача задействуется, водитель награждается посредством добавления к tengbrake такой же величины времени tsample, что и к ttotal, что означает, что вычисленное значение оценки торможения BA будет более высоким.
Изобретение относится также к компьютерному программному продукту, содержащему компьютерные программные инструкции для обеспечения возможности компьютерной системе в транспортном средстве выполнять этапы согласно способу, описанному выше, когда компьютерные программные инструкции исполняются на упомянутой компьютерной системе. Изобретение также содержит компьютерный программный продукт, который имеет компьютерные программные инструкции, сохраненные в нем на носителе, который может считываться посредством компьютерной системы.
Настоящее изобретение не ограничено вариантами осуществления, описанными выше. Могут использоваться различные альтернативы, модификации и эквиваленты. Вышеописанные варианты осуществления поэтому не ограничивают объем изобретения, который определяется посредством приложенной формулы изобретения.
Изобретение относится к способу оценки поведения торможения водителя. При осуществлении способа определяют, когда тормозной цикл начинается. Определяют время tengbrake, когда моторный тормоз-замедлитель транспортного средства используется в течение тормозного цикла. Определяют время tshift, потраченное, чтобы задействовать передачу в течение тормозного цикла. Определяют, когда тормозной цикл оканчивается. Определяют полное время ttotal для упомянутого тормозного цикла. Обрабатывают ttotal и tengbrake по отношению к tshift согласно предварительно определенным правилам. Вычисляют значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal. При этом правила требуют, чтобы если tshift больше, чем tshiftmax, которое является настраиваемым максимальным допустимым временем для изменения передачи, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample, где tsample является предварительно определенным периодом времени, и вычисленное значение оценки торможения BA представляют водителю. Предложена также система оценки поведения торможения водителя. Достигается поощрение водителя водить таким способом, что износ и потребление топлива минимизируется. 2 н. и 10 з.п. ф-лы, 6 ил., 1 табл.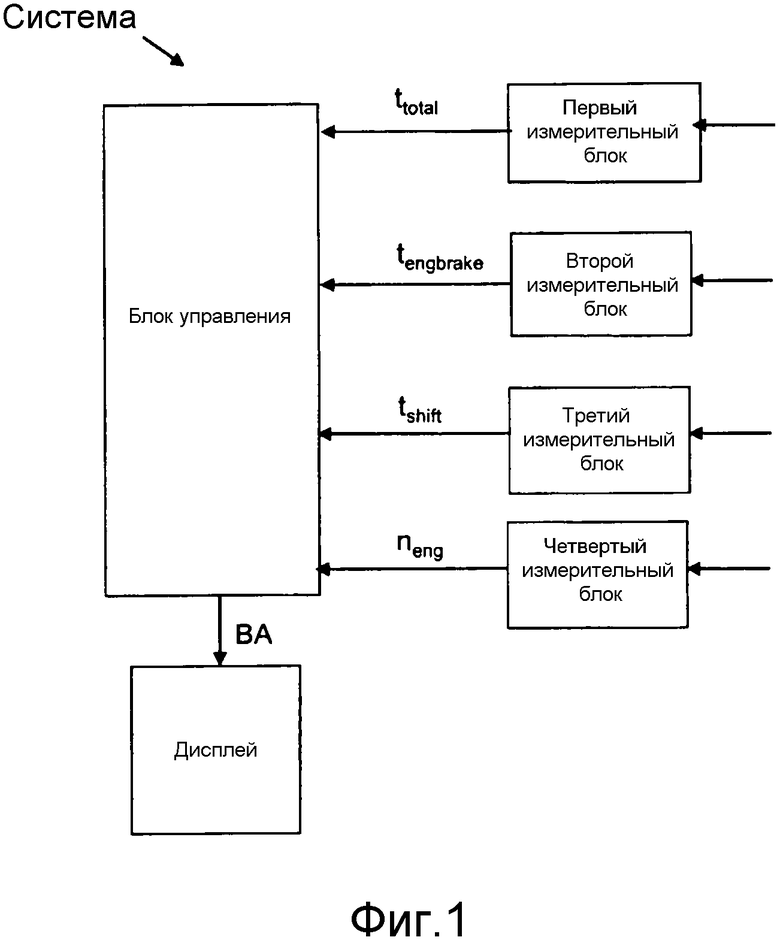
1. Способ оценки поведения торможения водителя, отличающийся тем, что способ содержит:
- определение, когда тормозной цикл начинается;
- определение времени tengbrake, когда моторный тормоз-замедлитель транспортного средства используется в течение тормозного цикла;
- определение времени tshift, потраченного, чтобы задействовать передачу в течение тормозного цикла;
- определение, когда тормозной цикл оканчивается;
- определение полного времени ttotal для упомянутого тормозного цикла;
- обработку ttotal и tengbrake по отношению к tshift согласно предварительно определенным правилам и вычисление значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal, при этом правила требуют, чтобы если tshift больше, чем tshiftmax, которое является настраиваемым максимальным допустимым временем для изменения передачи, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample, где tsample является предварительно определенным периодом времени, и вычисленное значение оценки торможения BA представляется водителю.
2. Способ по п. 1, в котором BA вычисляется на основе того, что BA=tengbrake/ttotal.
3. Способ по любому из предшествующих пунктов, при этом способ содержит
- определение частоты вращения двигателя neng в течение тормозного цикла,
- обработку ttotal и tengbrake по отношению к tsample и neng согласно предварительно определенным правилам, и
- вычисление значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal.
4. Способ по п.3, в котором упомянутые предварительно определенные правила требуют сравнения neng с предельными значениями nenghigh и nenglow для частоты вращения двигателя, при этом nenghigh является верхним предельным значением и nenglow - нижним предельным значением.
5. Способ по п.4, в котором правила требуют, чтобы
если neng больше, чем nenghigh, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample, и tengbrake - на основе того, что tengbrake=tengbrake+tsample,
если neng больше или равно nenglow и меньше, чем или равно nenghigh, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample, и tengbrake на основе того, что tengbrake=tengbrake+tsample(neng-nenglow)/(nenghigh-nenglow), и
если neng меньше, чем nenglow, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample,
где tsample является предварительно определенным периодом времени.
6. Способ по п.3, в котором, если тормоз-замедлитель в выпускной системе двигателя транспортного средства использовался в течение тормозного цикла и neng больше, чем nengexhaustbrake, то ttotal обрабатывается на основе того, что ttotal=ttotal+tsample, и tengbrake на основе того, что tengbrake=tengbrake+tsample, где nengexhaustbrake является предельным значением частоты вращения двигателя, относящимся к тормозу-замедлителю в выпускной системе двигателя.
7. Система оценки поведения торможения водителя, отличающаяся тем, что система содержит блок управления, соединенный с первым измерительным блоком, адаптированным для определения того, когда тормозной цикл начинается; вторым измерительным блоком, соединенным с устройством управления и адаптированным для определения времени tengbrake, когда моторный тормоз-замедлитель транспортного средства используется в течение тормозного цикла, и для доставки на этой основе второго временного сигнала, содержащего tengbrake; третьим измерительным блоком, соединенным с устройством управления и адаптированным для определения времени tshift, потраченного, чтобы задействовать передачу в течение тормозного цикла, и для доставки на этой основе третьего временного сигнала, содержащего tshift; при этом первый измерительный блок адаптирован для определения того, когда тормозной цикл оканчивается, определения полного времени ttotal для упомянутого тормозного цикла и доставки в устройство управления на этой основе первого временного сигнала, содержащего ttotal, при этом устройство управления дополнительно адаптировано для обработки ttotal и tengbrake по отношению к tshift согласно предварительно определенным правилам, и для вычисления значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal, при этом правила требуют, чтобы, если tshift больше, чем tshiftmax, которое является настраиваемым максимальным допустимым временем для изменения передачи, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample, где tsample является предварительно определенным периодом времени, и вычисленное значение оценки торможения BA представляется водителю на дисплее.
8. Система по п.7, в которой BA вычисляется на основе того, что BA=tengbrake/ttotal.
9. Система по любому из пп.7 и 8, при этом система содержит четвертый измерительный блок, адаптированный для определения частоты вращения двигателя neng в течение тормозного цикла; и блок управления адаптирован для обработки ttotal по отношению к tshift и neng согласно предварительно определенным правилам, и для вычисления значения оценки торможения BA на основе обработанных значений для tengbrake и ttotal.
10. Система по п. 9, в которой упомянутые предварительно определенные правила требуют сравнения neng с предельными значениями nenghigh и nenglow для частоты вращения двигателя, при этом nenghigh является верхним предельным значением и nenglow нижним предельным значением.
11. Система по п.10, в которой правила требуют, чтобы
если neng больше, чем nenghigh, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample, и tengbrake на основе того, что tengbrake=tengbrake+tsample,
если neng больше или равно nenglow и меньше, чем или равно nenghigh, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample, и tengbrake на основе того, что tengbrake=tengbrake+tsample(neng-nenglow)/(nenghigh-nenglow), и
если neng меньше, чем nenglow, то ttotal обрабатывалось на основе того, что ttotal=ttotal+tsample,
где tsample является предварительно определенным периодом времени.
12. Система по п. 9, в которой, если блок управления принимает сигнал относительно того, что тормоз-замедлитель в выпускной системе двигателя транспортного средства использовался в течение тормозного цикла и neng больше, чем nengexhaustbrake, то ttotal обрабатывается на основе того, что ttotal=ttotal+tsample, и tengbrake на основе того, что tengbrake=tengbrake+tsample, где nengexhaustbrake является предельным значением частоты вращения двигателя, относящимся к тормозу-замедлителю в выпускной системе двигателя.
| WO2007139491A1, 06.12.2007 | |||
| US20070276582A1, 29.11.2007 | |||
| WO2007139494A1, 06.12.2007 | |||
| US20080042489A1, 21.02.2008 |

