Изобретение относится к электромашиностроению, в частности к линейным шаговым двигателям, и может быть использовано преимущественно в устройствах ввода-вывода.
Известен линейный шаговый двигатель [RU 96111310 А, кл. H02N/04, 27.09.1998], содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, фиксирующие узлы выполнены в виде двух или более пьезоблоков, расположенных в продольной плоскости друг за другом, причем первый пьезоблок выполнен из сдвигающего и фиксирующего пьезоэлементов, разрезного фрикционного элемента, разделенных изоляторами, а второй пьезоблок выполнен из фиксирующего пьезоэлемента, разрезного фрикционного элемента и изоляторов, а подвижная часть расположена по оси двигателя и контактирует с разрезными подвижными элементами.
Недостатком такой конструкции является ограниченность функциональных и технологических возможностей.
Наиболее близким к предлагаемому изобретению является линейный шаговый двигатель [RU 96111526 А, кл. H02N/04, 27.09.1998], содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, фиксирующие узлы выполнены из не менее двух пьезоблоков, причем каждый пьезоблок состоит из сдвигающего пьезоэлемента и фиксирующего пьезоэлемента, разделенных относительно друг друга, корпуса и фрикционного элемента изоляторами, а расположены пьезоблоки внутри корпуса в продольной плоскости друг за другом.
Недостатком такой конструкции является небольшие усилия хода при малых габаритах.
Задачей является расширение функциональных и технологических возможностей линейного шагового двигателя, достижение больших усилий хода при малых габаритах и массе, повышение точности позиционирования и упрощение его конструкции за счет применения рычагов в качестве приводного элемента.
Поставленная задача по первому варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, при этом соосно с рычагами расположены возвратные пружины, на подвижной части, выполненной в виде штока, расположены зацепы, на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
Поставленная задача по второму варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлена на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги выполнены с втягивающимся сердечником, а на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
Поставленная задача по третьему варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению ведена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлены на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги имеют шарнирный механизм, расположены внутри корпуса в одной поперечной плоскости и выполнены в форме секторов, корпус выполнен с возможностью перемещения по роликам, а подвижная часть закреплена на неподвижном механизме.
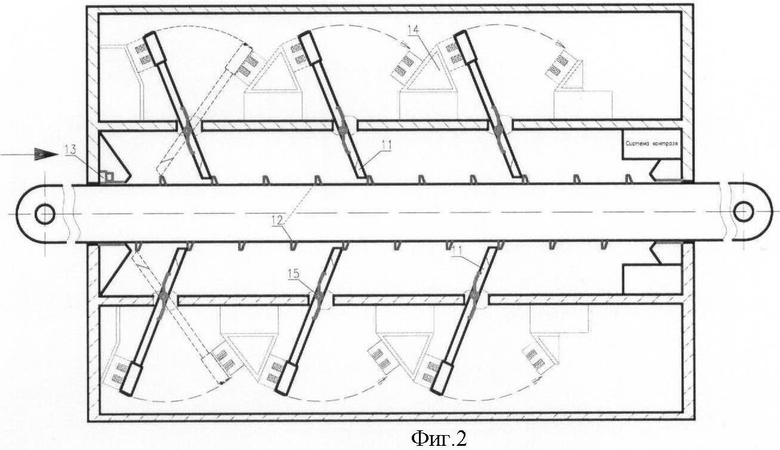
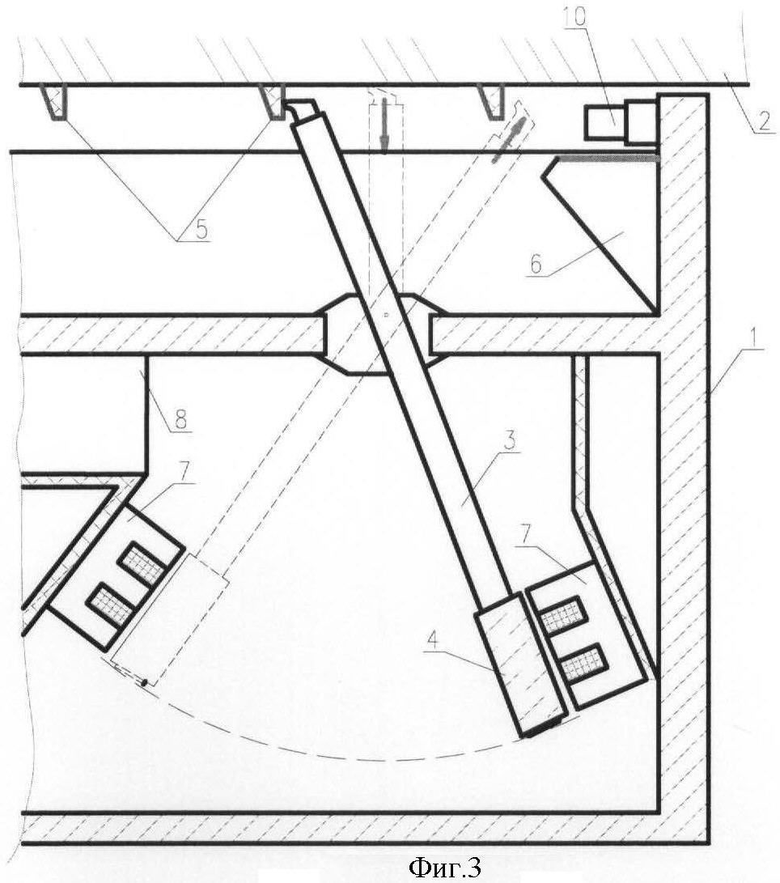
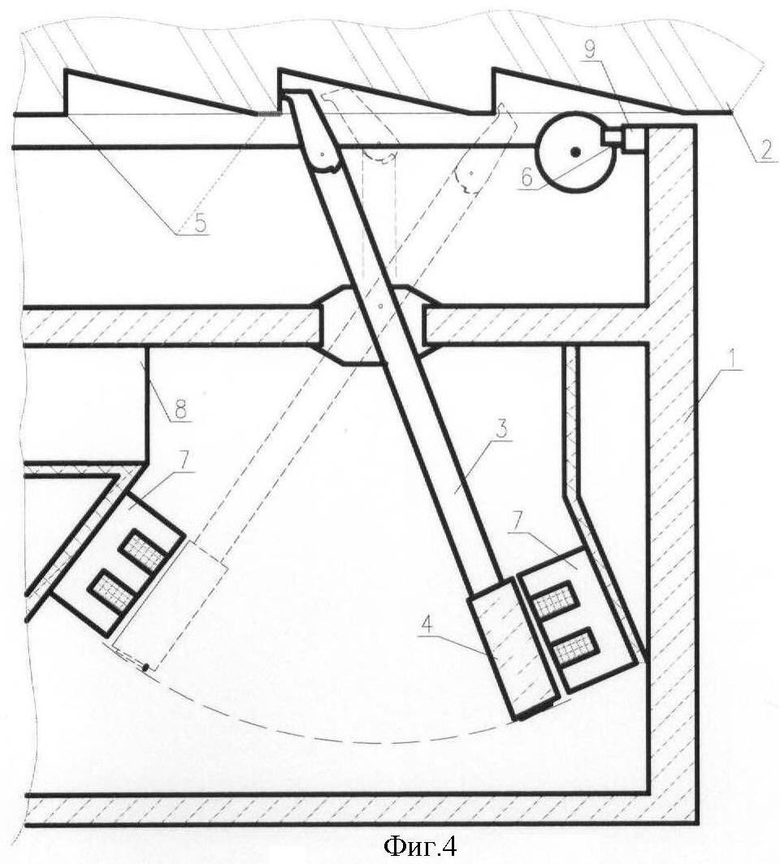
Сущность изобретения поясняется чертежами. На фиг.1 изображен продольно-вертикальный разрез двигателя. На фиг.2 изображен продольно-горизонтальный разрез двигателя. На фиг.3 изображен разрез узла рычага линейного шагового двигателя. На фиг.4 изображен разрез узла рычага линейного шагового двигателя.
Линейный шаговый двигатель по первому варианту. На фиг.1 - продольно-вертикальный разрез, на котором показан корпус 1 линейного шагового двигателя, шток 2, первая группа рычагов 3 с расположенными на них магнитными сердечниками 4, первая группа зацепов 5, подшипники скольжения 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10. На фиг.2 - продольно-горизонтальный разрез, на котором показано расположение второй группы рычагов 11, второй группы зацепов 12, концевого датчика 13, корпуса 14 для крепления электромагнита, возвратной пружины 15.
Линейный шаговый двигатель по второму варианту. На фиг.3 показан корпус 1 линейного шагового двигателя, шток 2, система рычагов 3 с втягивающимся сердечником, расположенная на корпусе, магнитные сердечники 4 расположенные на рычаге, зацепы 5, подшипники скольжения 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10.
Линейный шаговый двигатель по третьему варианту. На фиг.4 показан корпус 1 линейного шагового двигателя, шток 2, система рычагов 3 с шарнирным механизмом, магнитные сердечники 4, расположенные на рычаге, зацепы 5 в форме приямков, ролики 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10.
Линейный шаговый двигатель по первому варианту работает следующим образом: с помощью системы управления электромагнитами 8 на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг 3 выполняет движение, передавая силу электромагнитного притяжения зацепу 5, закрепленному на подвижной части, выполненной в виде штока 2, вследствие чего подвижная часть, выполненная в виде штока 2, совершает прямолинейное движение. После смещения подвижной части, выполненной в виде штока 2 первой группой рычагов 3, в процесс вступает вторая группа рычагов 3, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает подвижную часть, выполненную в виде штока 2, в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов 3 первая пара возвращается в исходное положение под действием возвратной пружины 15. Подвижная часть, выполненная в виде штока 2, в процессе движения скользит по подшипникам скольжения 6, расположенным на внутренней части корпуса 1. Аналогичный процесс производится рычагами 3, расположенными с торцевой стороны, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги 3, обеспечивающие движение подвижной части, выполненной в виде штока 2, в противоположном направлении, возвращаются в исходное положение. Подвижная часть, выполненная в виде штока 2, при достижении крайнего положения хода задействует датчик 13, расположенный с торца внутренней части корпуса линейного шагового двигателя, который через систему контроля 9 производит фиксацию линейного шагового двигателя в данном положении либо через систему управления 8 линейного шагового двигателя подает команду на электромагниты 7 для реверса. Датчики 10, 13 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Линейный шаговый двигатель по второму варианту работает следующим образом: с помощью системы управления электромагнитами 8, расположенной на подвижной части, выполненной в виде штока 2, на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг выполняет движение, передавая силу электромагнитного притяжения зацепу 5, закрепленному на корпусе 1, вследствие чего подвижная часть, выполненная в виде штока 2, совершает прямолинейное движение. После смещения подвижной части, выполненной в виде штока 2 первой группой рычагов 3, в процесс вступает вторая группа рычагов, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает подвижную часть, выполненную в виде штока 2, в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов первая пара рычагов 3 возвращается в исходное положение под действием электромагнитов 7. В процессе возврата рычага 3 в исходное положение рычаг 3 упирается в подвижную часть, выполненную в виде штока 2, подвижная часть рычага под действием силы нажатия начинает втягиваться, длина рычага соответственно уменьшается. После того как рычаг проходит через следующий зацеп, его подвижная часть под действием пружины выталкивается и попадает в нишу зацепа. Рычаг 3 в исходном положении. Подвижная часть, выполненная в виде штока 2, в процессе движения скользит по подшипникам скольжения 6, расположенным на внутренней части корпуса. Аналогичный процесс производится рычагами 3, расположенными с торцевой стороны, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги, обеспечивающие движение подвижной части, выполненной в виде штока 2, в противоположном направлении, возвращаются в исходное положение. Подвижная часть, выполненная в виде штока 2, при достижении крайнего положения хода задействует датчики 10, расположенные с торца внутренней части корпуса 1 линейного шагового двигателя, которые через систему контроля 9 производят фиксацию линейного шагового двигателя в данном положении либо через систему управления 8 линейного шагового двигателя подают команду на электромагниты 7 для реверса. Датчики 10 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Линейный шаговый двигатель по третьему варианту работает следующим образом: подвижная часть, выполненная в виде штока 2, имеет жесткое крепление с корпусом устройства, в котором применяется, корпус 1 закреплен на подвижном механизме этого устройства. С помощью системы управления электромагнитами 8, расположенной на подвижной части, выполненной в виде штока 2, на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг 3 выполняет движение, передавая силу электромагнитного притяжения зацепу 5, вследствие чего корпус 1 совершает прямолинейное движение. После смещения корпуса 1 первой группой рычагов 3 в процесс вступает вторая группа рычагов 3, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает корпус 1 в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов 3 первая пара возвращается в исходное положение. Подвижная часть, выполненная в виде штока 2, в процессе движения катится по роликам 6, расположенным на внутренней части корпуса 1. Аналогичный процесс производится рычагами 3, расположенными в той же плоскости, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги 3, обеспечивающие движение корпуса 1 в противоположном направлении, возвращаются в исходное положение. Корпус 1 при достижении крайнего положения хода задействует датчики 9, расположенные по краям корпуса линейного шагового двигателя, которые через систему контроля производят фиксацию линейного шагового двигателя в данном положении либо через систему управления электромагнитами 8 линейного шагового двигателя, подают команду на электромагниты 7 для реверса. Датчики 10 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Итак, заявляемое изобретение позволяет расширить функциональные и технологические возможности линейного шагового двигателя, в качестве элемента осуществляющего прямолинейное возвратно-поступательное передвижение подвижной части, благодаря применению рычагов, приводимых в движение электромагнитами, которые цепляют поочередно зацепы, расположенные на подвижной части, передвигая ее в заданном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗОГНУТЫХ ТРУБ | 2016 |
|
RU2622197C1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА ВИБРАЦИОННОГО ДЕЙСТВИЯ ДЛЯ РУЧНОГО ИНСТРУМЕНТА | 2016 |
|
RU2619075C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167486C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2161364C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЗМ В.И.СМИРНОВА | 1992 |
|
RU2102826C1 |
| УЗЕЛ КЛАПАНА ДЛЯ РЕГУЛИРОВАНИЯ ПОДАЧИ ГОРЮЧЕГО ГАЗА | 2002 |
|
RU2280212C2 |
Изобретение относится к электротехнике, к линейным шаговым двигателям (ЛШД), и может быть использовано преимущественно в устройствах ввода - вывода. Технический результат состоит в расширении функциональных и технологических возможностей ЛШД и упрощении его конструкции за счет применения рычагов в качестве приводного элемента. В ЛШД в качестве элемента, осуществляющего передвижение подвижной части, введена система приводных элементов-рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе. На внутренней части корпуса расположены подшипники скольжения. Имеются датчики для контроля положения подвижной части двигателя, связанные с системой контроля. По первому варианту соосно с рычагами расположены возвратные пружины. На подвижной части расположены зацепы. По второму варианту система управления расположена в корпусе, рычаги и системы управления выполнены на подвижной части, а зацепы соответственно на корпусе. Рычаги выполнены с втягивающимся сердечником. Отличие третьего варианта от второго состоит в том, что рычаги имеют шарнирный механизм, расположены внутри корпуса в одной поперечной плоскости и выполнены в форме секторов. Движение подвижной части происходит по роликам. Корпус является подвижным, а подвижная часть закреплена на неподвижном механизме. 3 н.п. ф-лы, 4 ил.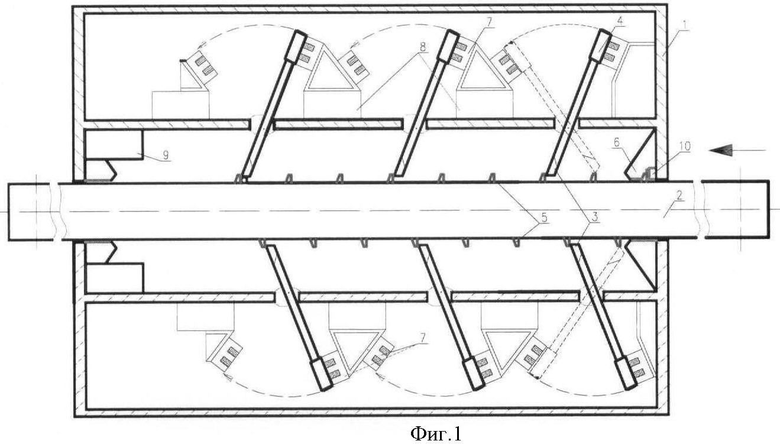
1. Линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, отличающийся тем, что введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, при этом соосно с рычагами расположены возвратные пружины, на подвижной части, выполненной в виде штока, расположены зацепы, на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
2. Линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, отличающийся тем, что введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлена на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги выполнены с втягивающимся сердечником, а на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
3. Линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, отличающийся тем, что введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлены на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги имеют шарнирный механизм, расположены внутри корпуса в одной поперечной плоскости и выполнены в форме секторов, корпус выполнен с возможностью перемещения по роликам, а подвижная часть закреплена на неподвижном механизме.
| Линейный дискретный электропривод | 1986 |
|
SU1605297A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU985893A1 |
| RU 2001489 C1, 15.10.1993 | |||
| Шаговый электродвигатель | 1986 |
|
SU1410220A1 |
| Линейный шаговый двигатель | 1984 |
|
SU1192060A1 |
| Электромагнитное устройство | 1980 |
|
SU991960A3 |
| Линейный шаговый электродвигатель | 1990 |
|
SU1767639A1 |
| ТЯГОВЫЙ ЦЕПНОЙ ЭЛЕКТРОМАГНИТ | 2001 |
|
RU2217827C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| EP 20081207 A1, 22.07.2009 | |||
| DE 19825732 A1, 04.02.1999 | |||
| US 4697164 A, 29.09.1987. | |||

