Изобретение относится к устройствам, предназначенным для гибки труб, и может найти применение в теплотехнике, при ремонтных работах и т.п.
Известен ручной трубогиб по патенту РФ №2521910 на изобретение, содержащий гибочный шаблон и обкатной ролик, выполненные с ребордами, по цилиндрической поверхности которых нарезаны зубья для взаимодействия обкатного ролика с гибочным шаблоном, при этом обкатной ролик и гибочный шаблон соединены двумя пластинами с возможностью свободного вращения между ними, допускающего взаимодействие зубьев обкатного ролика с зубьями гибочного шаблона, причем гибочный шаблон и обкатной ролик имеют центральные отверстия квадратной формы, вокруг которых выполнены выступы цилиндрической формы, а на концах пластин под упомянутые выступы выполнено два сквозных отверстия квадратной формы для соединения пластин с обкатным роликом и гибочным шаблоном и размещения в них инструмента, обеспечивающего вращение обкатного ролика и по гибочному шаблону.
Недостатком трубогиба по патенту РФ №2521910 является то, что он предназначен для гибки труб вручную, что ограничивает его функциональные возможности, а также снижает точность изгиба труб; низкая производительность трубогиба.
Известен гидростанок для изготовления изогнутых трубчатых изделий по патенту РФ №98953 на полезную модель, представляющий собой установленные на станине подключенный к гидронасосу гидроцилиндр со штоком, несущим на своем торце съемный гибочный шаблон, и два сменных упорных поворотных ролика, закрепленных осями на станине перпендикулярно к плоскости перемещения гибочного шаблона, при этом шток гидроцилиндра снабжен коробчатым зажимом гибочного шаблона, выполненным с опорой скольжения по горизонтальной пластине станины, гибочный шаблон имеет ручей с распределенными по его глубине рабочей и заходной частями, причем опорная рабочая часть ручья выполнена с превышением ее глубины над радиусом трубчатой заготовки для предотвращения при холодной гибке с малым радиусом гибки трубчатой заготовки деформационных наплывов ее внешней стенки на входные края рабочей части ручья гибочного шаблона, и переходит в заходную часть ручья, образуемую продолжением стенок рабочей части ручья с расширением поперечного сечения ручья на входе гибочного шаблона, а станина гидростанка, несущая оси опорных поворотных роликов, оснащена опорной направляющей подачи и предгибочного размещения трубчатой заготовки с соблюдением условия расположения ее центральной оси на уровне центральной плоскости гибки, при этом указанная опорная направляющая выполнена, например, в виде двух боковых опорных площадок, установленных на станине по одной с двух сторон зоны перемещения гибочного шаблона. Опорная рабочая часть ручья гибочного шаблона может иметь переходящий в заходную часть ручья участок с постоянным поперечным рабочим зазором на протяжении глубины ручья от ее величины, равной радиусу трубчатой заготовки, до величины, превышающей радиус трубчатой заготовки не более чем на 30%. Станина может иметь профильную каркасную конструкцию, несущую входящие в состав гидросистемы гидростанка масляный бак и гидронасос, установленные под плоскостью расположения горизонтального гидроцилиндра с гибочным шаблоном, закрепленным на торце его штока, и двух опорных роликов с вертикальными осями их поворота, причем на оси двух сменных опорных роликов опирается верхняя съемная пластина жесткости с центральным окном контроля гибки, смонтированная с опорой также на станину над гибочным шаблоном в его исходном положении, а станина имеет набор отверстий под оси указанных роликов в зависимости от радиуса гибки и соответствующего ему гибочного шаблона. Гидросистема может быть снабжена гидрораспределителем, обеспечивающим внешнее гидропитание дополнительных гидропотребителей.
Недостатком гидростанка по патенту №98953 на полезную модель являются его ограниченные функциональные возможности, обусловленные невозможностью изготовления сложных трехмерных изогнутых профилей труб, низкая производительность, сложность конструкции.
Известно устройство для гибки и зажима труб по патенту РФ №2043803 на изобретение, содержащее установленную на основании с возможностью возвратно-поступательного перемещения по направляющим каретку с закрепленными на ней держателем с рабочим инструментом и кронштейном, связанным посредством рычага, осей и вилки с механизмом перемещения каретки, а также установленный на валу держатель с вторым рабочим инструментом, причем основание смонтировано с возможностью поворота относительно упомянутого вала, при этом устройство снабжено соединенным с рычагом посредством оси коромыслом, подпружиненным в направлении, перпендикулярном направлению перемещения каретки, а в рычаге выполнено овальное отверстие, в котором размещена ось, связывающая рычаг с коромыслом, выполненным с выступом, взаимодействующим с основанием, при этом рабочий инструмент выполнен сменным.
Устройство по патенту РФ №2043803 на изобретение выбрано в качестве наиболее близкого аналога (прототипа).
Недостатком устройства по патенту №2043803 является его сложность и ограниченные функциональные возможности, обусловленные невозможностью создавать сложные изогнутые трехмерные профили труб; низкая производительность устройства.
Задача, решаемая заявляемым изобретением - создание устройства для изготовления изогнутых труб, обладающего широкими функциональными возможностями и высокой точностью.
Технический результат, достигаемый изобретением - обеспечение возможности создания сложных трехмерных профилей изогнутых труб, повышение производительности процесса гибки труб за счет возможности автоматизации процесса и совмещения в одном устройстве функций гибки труб и их отрезания.
Заявляемый технический результат достигается тем, что устройство для изготовления изогнутых труб, содержащее станину, каретку, связанную со станиной и установленную с возможностью ее возвратно-поступательного перемещения, механизм перемещения каретки, механизм изгиба трубы, содержащий два ролика, представляющие собой, соответственно, гибочный шаблон и гибочный ролик, согласно изобретению содержит систему управления, станина в плане выполнена П-образной, каретка размещена между боковыми сторонами П-образной станины с возможностью контролируемого линейного горизонтального перемещения между ними, каретка жестко связана с подшипником скольжения, в котором в плоскости, перпендикулярной направлению перемещения каретки, установлен с возможностью контролируемого вращения в указанной плоскости поворотный круг, при этом вращение поворотного круга обеспечено соответствующим шаговым двигателем, в поворотном круге выполнено центральное отверстие для прохождения трубы с возможностью фиксации ее положения относительно поворотного круга, на расстоянии от поворотного круга со стороны выхода из него трубы размещен механизм изгиба трубы, содержащий гибочный шаблон и гибочный ролик, установленный с возможностью контролируемого переносного вращения вокруг гибочного шаблона, гибочный шаблон и гибочный ролик расположены в плоскости, перпендикулярной плоскости поворотного круга, механизм изгиба содержит также зубчатое колесо, приводимое во вращение соответствующим шаговым двигателем, зубчатое колесо и гибочный шаблон имеют общую ось вращения, ось вращения гибочного ролика параллельна оси вращения гибочного шаблона и жестко связана с зубчатым колесом, наружные боковые поверхности роликов выполнены вогнутыми, при этом ролики установлены рядом друг с другом с образованием между их наружными боковыми поверхностями, обращенными друг к другу, отверстия, достаточного для размещения трубы, указанное отверстие сформировано напротив центрального отверстия, выполненного в поворотном круге для обеспечения возможности подачи трубы из центрального отверстия поворотного круга в отверстие между наружными боковыми поверхностями роликов, двигатели устройства связаны с системой управления.
Механизм изгиба трубы и поворотный круг могут быть размещены за пределами габаритов станины.
Ролики могут быть выполнены с возможностью их замены.
Устройство может быть снабжено держателем трубки, жестко связанным с поворотным кругом со стороны подвода трубы к поворотному кругу.
Каретка может быть установлена на направляющих, закрепленных между боковыми сторонами П-образной станины, с возможностью перемещения вдоль направляющих.
Не менее, чем на одной из боковых сторон станины может быть установлен датчик, фиксирующий и контролирующий положение каретки, соответствующее исходному положению, линейное перемещение каретки между боковыми сторонами станины обеспечено за счет зубчатого ремня, связанного с кареткой и управляемого шаговым двигателем каретки.
Со стороны подвода трубы на поворотном круге может быть размещен зажим трубы, состоящий из двух прижимных элементов, расположенных по периметру центрального отверстия напротив друг друга, при этом первый прижимной элемент выполнен неподвижным и прикреплен к поворотному кругу, а другой прижимной элемент связан с якорем электромагнита или является якорем электромагнита, закрепленного на поворотном круге и связанного с системой управления.
Устройство может быть снабжено датчиком, фиксирующим и контролирующим положение поворотного круга, соответствующее исходному положению.
Устройство может быть снабжено механизмом отсечения, содержащем отрезной диск, установленный на рычаге, вращающемся вокруг оси, жестко закрепленной относительно станины, рычаг связан с пневмоцилиндром, обеспечивающим поворот рычага вокруг оси вращения, двигатель, предназначенный для обеспечения вращения отрезного диска и связанный с системой управления.
Шаговый двигатель каретки и шаговый двигатель зубчатого колеса могут быть жестко связаны со станиной, а шаговый двигатель поворотного круга может быть жестко связан с корпусом каретки, в котором в подшипнике скольжения установлен поворотный круг.
На боковой стороне станины, с которой связан механизм изгиба, могут быть закреплены два ограничителя, установленные на расстоянии друг от друга с образованием между ними паза, предназначенного для размещения трубы, указанные ограничители установлены со стороны входа трубы в отверстие между наружными боковыми сторонами роликов, а паз между ограничителями расположен напротив указанного отверстия.
Заявляемое устройство представляет собой трубогиб - автомат. Устройство содержит станину, имеющую в плане (сверху) П-образную форму. Между боковыми сторонами (консолями) станины закреплена одна или две параллельных направляющих. Вдоль направляющей между боковыми сторонами (консолями) станины двигается каретка, приводимая в движение приводом через зубчатый ремень. Каретка жестко связана с подшипником скольжения, в котором размещен с возможностью вращения вокруг своей оси поворотный круг. Поворотный круг приводится во вращение двигателем через шестерню поворотного круга, передающей вращение от двигателя поворотному кругу. Поворотный круг (и шестерня поворотного круга) выполнены с центральным отверстием, предназначенным для размещения трубы, которую необходимо изогнуть специальным, заранее заданным образом. Для обеспечения удобного размещения трубы в поворотном круге, поворотный круг прикреплен к участку каретки, обращенному от внутренней полости П-образной станины таким образом, что центральное отверстие поворотного круга оказывается расположенным за габаритами станины, т.е. вне конструктивных элементов станины и ее внутренней полости. Поворотный круг обеспечивает вращение трубы в плоскости, перпендикулярной направлению перемещения подвижной каретки. Таким образом, при линейном перемещении каретки и при вращении поворотного круга вместе с ними линейно перемещается и вращается и труба, занимая необходимое (заранее заданное) пространственное положение. Двигатель, приводящий в движение каретку выполнен шаговым для обеспечения контролируемого углового перемещения вала двигателя.
Заданный диапазон линейного перемещения каретки обеспечивается системой управления, задающей количество угловых перемещений вала двигателя. Определенное количество угловых перемещений вала двигателя соответствует линейному перемещению каретки на соответствующее расстояние.
Исходное положение вала двигателя, а, соответственно, исходное положение каретки задается и контролируется датчиком положения, фиксирующим положение каретки, соответствующее исходному.
При линейном перемещении каретки, труба вместе с кареткой перемещается по направлению от первой (левой на фиг. 1) боковой стороны станины ко второй. При этом на второй боковой стороне станины закреплен второй шаговый двигатель, вращение вала которого обусловливает, через зубчатую передачу переносное вращение гибочного ролика, установленного на своей оси вращения. Рядом с гибочным роликом на своей оси вращения, установлен гибочный шаблон в той же плоскости (перпендикулярной плоскости вращения поворотного круга), что и гибочный ролик. Боковые поверхности обоих роликов (гибочного шаблона и гибочного ролика) выполнены вогнутыми, при этом при размещении обоих роликов относительно друг друга между ними образовано отверстие, диаметр которого позволяет разместить в нем трубу. Центральная ось симметрии отверстия, образованного между боковыми поверхностями первого и второго роликов совпадает с осью вращения поворотного круга.
Ролик, представляющий собой гибочный шаблон, является направляющим, задающим перемещение для гибочного ролика, который перемещается вокруг гибочного шаблона (огибает гибочный шаблон), гибочный ролик изгибает размещенную между роликами трубу. При этом радиус изгиба трубы будет определяться диаметром гибочного шаблона.
Возможный диапазон перемещения гибочного ролика относительно гибочного шаблона задается системой управления, определяющей количество импульсов на второй шаговый двигатель. Положение гибочного ролика, соответствующее исходному, контролируется датчиком положения, закрепленным, например, на второй боковой стороне станины.
Следует отметить, что все используемые в устройстве датчики положения необходимо устанавливать на неподвижном элементе конструкции. Указанные датчики предназначены для фиксирования положения подвижных элементов устройства, соответствующего исходному положению, которое, в свою очередь, задается ручной настройкой при сборке устройства.
После того, как получили фрагмент трубы необходимого профиля, осуществляют отсечение данного фрагмента от остальной трубы. Отсечение (отрезание) фрагмента трубы осуществляют посредством механизма отсечения, содержащего отрезной диск, вращение которого обеспечивается специальным двигателем. Отрезной диск установлен на рычагах, связанных с пневмоцилиндром, обеспечивающим плавное движение рычагов и направление отрезного диска к трубе. Управление пневмоцилиндром механизма отсечения осуществляется системой управления устройства.
Таким образом, заявляемое изобретение позволяет обеспечить сложный трехмерный изгиб трубы. Точность геометрии трубы задается системой управления, обеспечивающей заданное контролируемое перемещение движущихся элементов устройства. Заявляемое устройство позволяет автоматизировать процесс изготовления изогнутых труб. Изобретение наиболее эффективно для изгиба тонких трубок, применяемых, например, в теплотехнике.
Заявляемое изобретение поясняется чертежами.
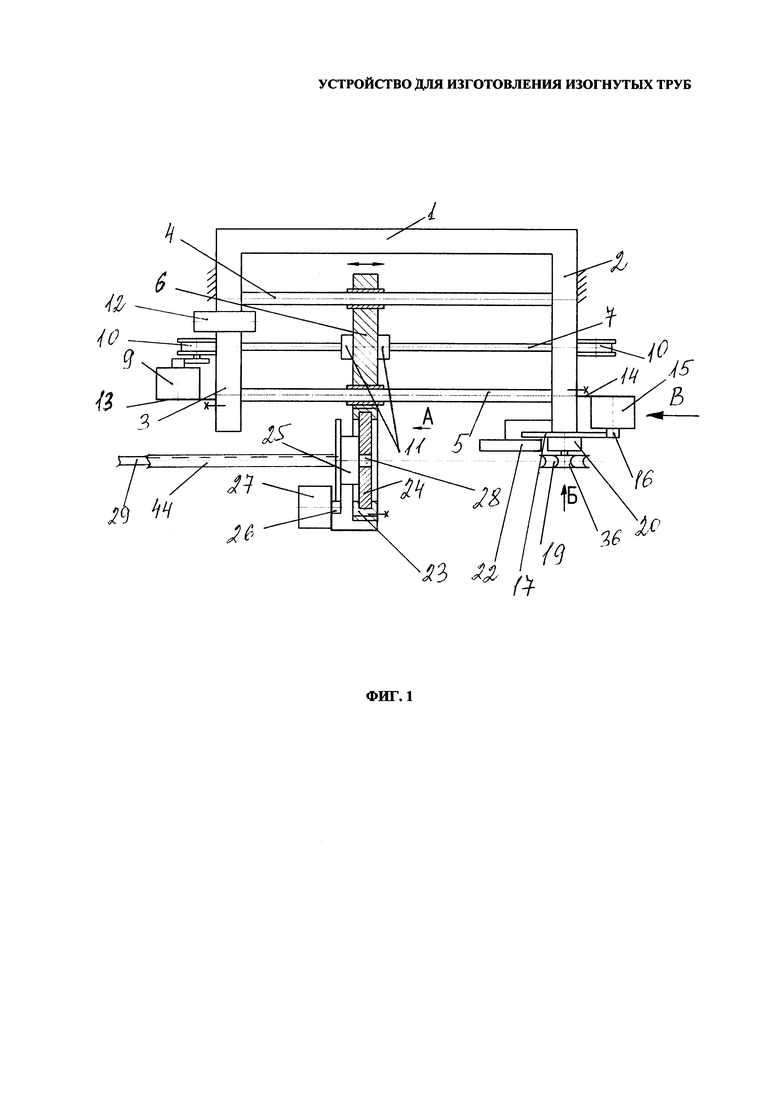
На фиг. 1 изображено заявляемое устройство в плане - вид сверху.
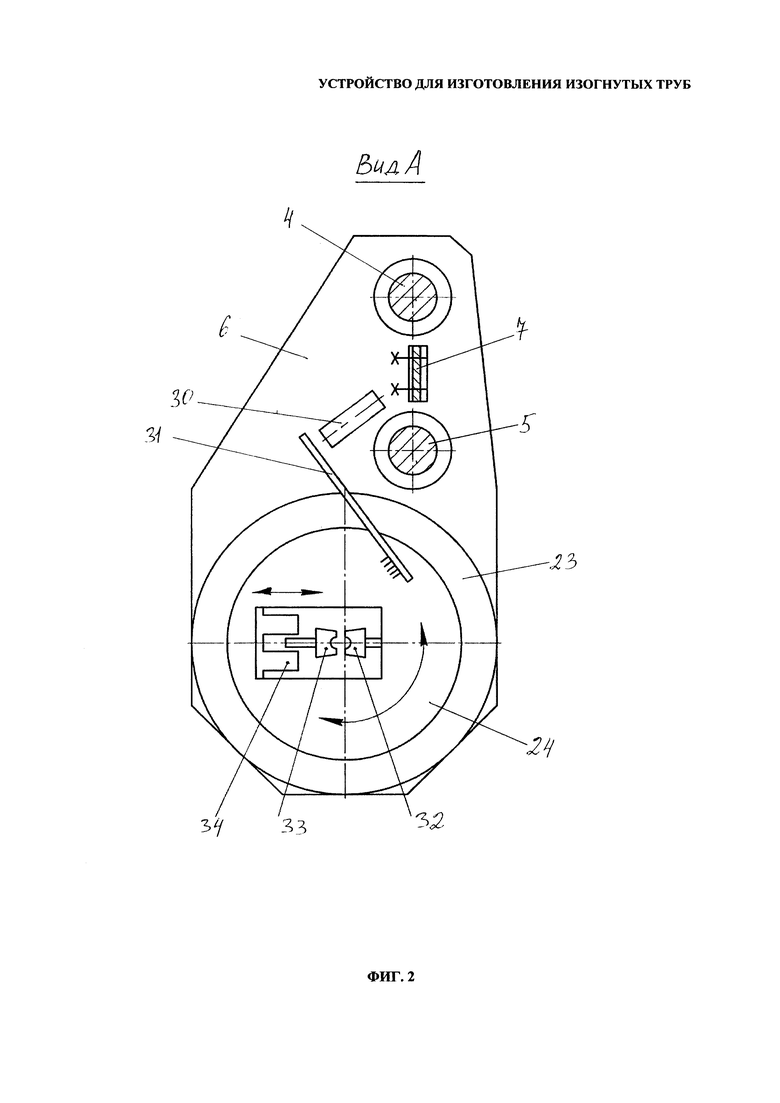
На фиг. 2 изображен вид A (вид каретки).
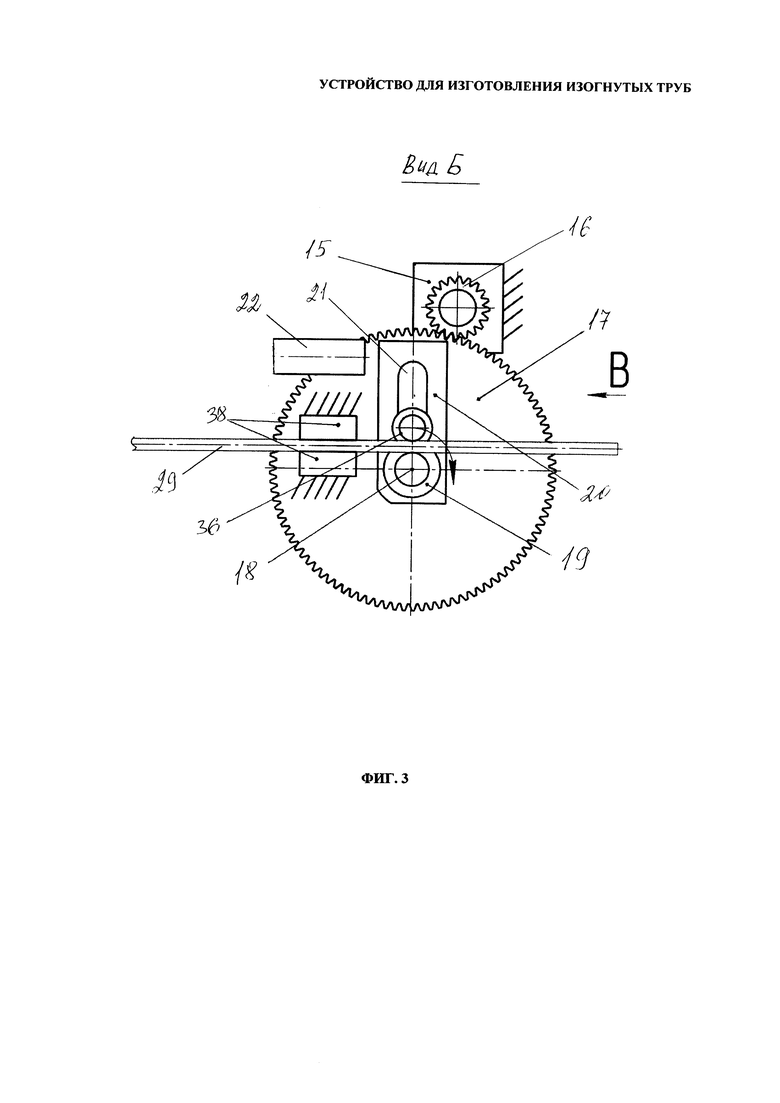
На фиг. 3 изображен вид Б, на котором видны ролики, осуществляющие изгиб трубы.
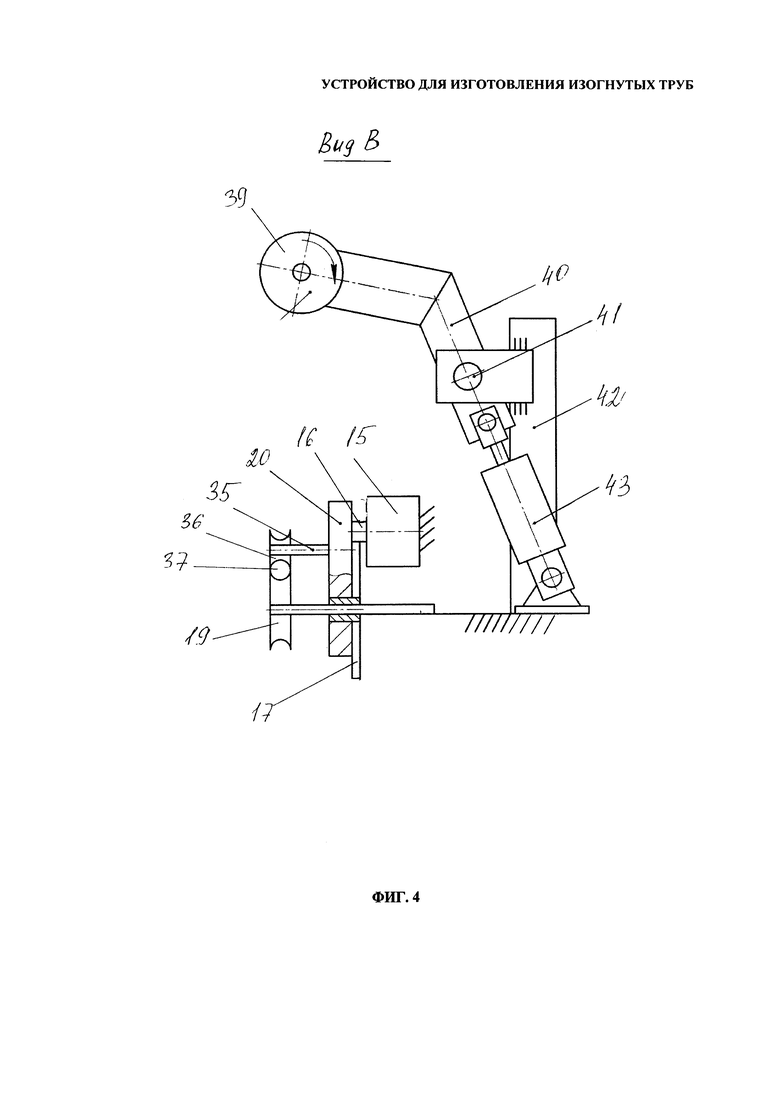
На фиг. 4 изображен механизм отсечения (вид В).
Заявляемое устройство содержит П-образную станину 1; между боковыми консолями 2 и 3 станины 1 параллельно друг другу установлены две направляющие 4 и 5, закрепленные относительно станины; на направляющих 4 и 5 установлена каретка 6 с возможностью ее линейного перемещения вдоль направляющих 4 и 5 от консоли 2 к консоли 3 и обратно; каретка 6 приводится в движение зубчатым ремнем 7, которому, в свою очередь, движение передается через шестерню 8 от шагового двигателя 9 каретки 6; зубчатый ролик 10, связанный с консолью со стороны двигателя 9 является ведущим, а зубчатый ролик, связанный с противоположной консолью, является ведомым, ролики 10 предназначены для организации перемещения зубчатого ремня 7; концы зубчатого ремня 7 закреплены на каретке зажимами 11, таким образом, перемещение зубчатого ремня 7 посредством зубчатых роликов 10 обеспечивает линейное перемещение каретки 6 вдоль направляющих 4 и 5 (количество направляющих определяется необходимостью надежного контролируемого размещения каретки относительно станины); на консоли 3 станины 1 установлен датчик положения 12, фиксирующий исходное положение (начало координат) каретки 6; двигатель 9 закреплен посредством кронштейна 13 относительно консоли 3; на консоли 2 станины 1 посредством кронштейна 14 закреплен шаговый двигатель 15; вращение вала двигателя 15 через шестерню 16 передается зубчатому колесу 17; на оси вращения 18 зубчатого колеса 17 горизонтально закреплен ролик 19 (гибочный шаблон) с возможностью вращения в вертикальной плоскости; между зубчатым колесом 17 и роликом 19 на оси 18 установлена деталь 20 с пазом 21, закрепленная относительно колеса 17; возможный диапазон поворота (вращения) зубчатого колеса 17 задается системой управления устройства, определяющей количество шагов двигателя 15; с участком каретки 6, обращенному от внутренней полости П-образной станины, жестко связан подшипник 23 скольжения, в котором размещен с возможностью вращения вокруг своей оси поворотный круг 24; на поворотном круге 24 жестко прикреплена шестеренка 25, взаимодействующая с шестеренкой 26, установленной на валу шагового двигателя 27 поворотного круга, таким образом, что вращение вала двигателя 27 обусловливает вращение вокруг своей оси поворотного круга 24 в плоскости, перпендикулярной направлению перемещения каретки 6; шестерня 25 и поворотный круг 24 имеют общую ось вращения, при этом шестерня 25 и поворотный круг 24 выполнены с центральным отверстием 28, диаметр которого больше диаметра трубы 29, предназначенной для изгибания; положение поворотного круга 24, соответствующее исходному положению, задают и фиксируют посредством системы управления и датчиком положения 30, закрепленным относительно корпуса каретки 6; на поворотном круге 24 жестко закреплена пластина 31; пластина 31 предназначена для того, чтобы по ее положению фиксировать с помощью датчика 30 положение поворотного круга 24, соответствующее исходному положению, диапазон поворота поворотного круга 24 задают системой управления путем определения количества шагов двигателя 27; по периметру центрального отверстия 28 поворотного круга 24 напротив друг друга размещены два прижимных элемента 32 и 33, снабженные губками и образующие зажим трубы 29, при этом неподвижный прижимной элемент 32 прикреплен к поворотному кругу 24; другой прижимной элемент 33 жестко связан с якорем электромагнита 34, закрепленного на поворотном круге 24 (или же таким прижимным элементом является сам якорь электромагнита 34), т.е. прижимной элемент 33 является подвижным относительно прижимного элемента 32; управление электромагнитом 34 осуществляется от системы управления; электромагнит 34 предназначен для фиксирования трубы 29 относительно поворотного круга 24; рядом с роликом 19 в одной плоскости с ним на оси вращения 35 установлен гибочный ролик 36, ось вращения 35 установлена в пазу 21 детали 20 и жестко связана с деталью 20 (которую, согласно ее функции, можно назвать водилом); ролики 19 и 36 установлены с возможностью вращения в одной плоскости - в плоскости, перпендикулярной плоскости вращения поворотного круга 24 и параллельной направлению перемещения каретки 6; наружные боковые поверхности роликов 19 и 36 выполнены вогнутыми, таким образом, что при размещении роликов 19 и 36 рядом друг с другом, между их обращенными друг к другу наружными поверхностями образуется отверстие 37, предназначенное для размещения трубы 29; для того, чтобы в процессе изгиба одного конца трубы 29, другой ее конец был зафиксирован, в заявляемом устройстве предусмотрены ограничители 38, установленные на расстоянии друг от друга, образующем паз для прохождения трубы 29, ограничители 38 закреплены относительно станины 1 таким образом, чтобы паз между ними находился напротив отверстия 37, с тем, чтобы обеспечить подачу трубы 29, выходящей из центрального отверстия 28 поворотного круга 24 в отверстие 37 через паз между ограничителями 38; устройство содержит закрепленный относительно станины 1 механизм отсечения с отрезным диском 39, вращение которого обеспечивается двигателем (на чертеже не показан), управляемым системой управления; отрезной диск 39 установлен на рычаге 40, качающемся на оси 41, закрепленной относительно кронштейна 42, который, в свою очередь, закреплен относительно станины 1; управление движением рычага 40 осуществляется пневмоцилиндром 43, корпус которого закреплен на станине 1 с возможностью качания, при этом управление пневмоцилиндром 43 осуществляется от системы управления; к поворотному кругу 24 крепится со стороны подвода трубы 29 держатель 44 трубы. Двигатели 9, 15, 27 представляют собой шаговые электродвигатели. Датчики 12, 22, 30 являются датчиками положения и предназначены для фиксирования исходного положения (начало координат) контролируемого подвижного элемента устройства. Ролики 19 и 36, зубчатое колесо 17, датчик 22, двигатель 15, шестерня 16, деталь 20 с пазом 21 образуют собственно механизм изгиба трубы 29. Система управления задает количество шагов валов шаговых двигателей, определяющих диапазон перемещения (вращения) соответствующего подвижного элемента (подвижной координаты) устройства. Заявляемое устройство работает следующим образом.
Труба 29 через держатель трубы 44, прижимные элементы 32 и 33, через ограничители 38 устанавливается в исходное положение в отверстии 37. После того, как исходное положение трубы 29 зафиксировано, оператор нажимает кнопку «Пуск» системы управления, запуская предварительно заданный в соответствии с требуемой формой трубы алгоритм работы устройства. Срабатывает электромагнит 34 и прижимной элемент 33 прижимает трубу 29 к прижимному элементу 32, фиксируя, таким образом, ее положение в поворотном круге 24. Включается двигатель 9 и подвижная каретка 6 посредством зубчатого ремня 7 перемещается на заданное расстояние, подавая трубу 29 вперед в направлении роликов 19 и 36. В зависимости от формируемого контура изогнутой трубы 29 включается двигатель 27 или 15. Двигатель 27 обеспечивает поворот трубы 29 вокруг своей оси, а двигатель 15 обеспечивает изгиб трубы вокруг ролика 19 при обкатке ролика 19 роликом 36. Плоский контур изгиба трубы формируется при поворотах вала двигателя 27 на 180°. Объемный контур изгиба трубы 29 формируется при поворотах вала двигателя 27 на угол менее 180°. Посредством выбора диаметра ролика 19 осуществляется выбор радиуса изгиба трубы 29. При замене ролика 19 на ролик другого диаметра, положение ролика 36 относительно ролика 19 корректируется путем перемещения оси 35 ролика 36 в пазу 21. Прямолинейные участки между изгибами трубы 29 задаются при линейном перемещении каретки 6 между каждым циклом изгиба трубы 29. В целом очередность срабатывания двигателей 9, 27 и 15 задается в соответствии с требуемым контуром трубы системой управления, с которой связаны все двигатели. Перед очередной подачей трубы 29 вперед для изгиба следующего участка трубы 29 якорь электромагнита 34 возвращается в исходное положение, при этом прижим элемента 33 к элементу 32 снимается, каретка 6 возвращается в исходное положение. Чтобы при этом груба 29 не увлекалась обратным ходом каретки 6, ограничители 38 выполняют с возможностью создания тормозящего усилия на трубу 29 при ее обратном ходе, при этом указанное тормозящее усилие ограничителей 38 превышает возможное воздействие на трубу 29 при перемещении каретки 6 в исходное положение. Положение каретки 6 относительно исходного положения контролируется датчиком 12, положение зубчатого колеса 17 относительно исходного положения контролируется датчиком 22, положение поворотного круга 24 относительно исходного положения контролируется датчиком 30.
Рассечение трубы на отдельные участки в соответствии с сформированными профилями участков осуществляют механизмом отсечения. В момент отсечения трубка 29 останавливается, включается привод отрезного диска 39, срабатывает пневмоцилиндр 43 и рычаг 40, качаясь на оси 41, подводит отрезной диск 39 к трубке 29. В момент отсечения вступают в действие пружины (на чертежах не показаны), нагружающие пневмоцилиндр 43, и он плавно перерезает трубку.
Заявляемое устройство наиболее эффективно при изгибании труб малого диаметра, начиная с 2-х мм, а возможно и менее.
Для перехода на другие диаметры трубок контура и другие радиусы гиба необходимы, соответственно, новые ролики 19 и 36, поднастройка положения оси 35, а также замена элементов 38 и губок захвата 32 и 33.
Заявляемое устройство обладает широкими функциональными возможностями за счет того, что оно обеспечивает получение профиля (контура) изогнутой трубы любой самой сложной плоской или объемной (трехмерной) формы. Заявляемое устройство позволяет полностью автоматизировать процесс изготовления изогнутых труб, что позволяет повысить точность геометрии трубы (за счет контроля всех параметров системой управления), позволяет исключить неконтролируемую деформацию трубы при ее изгибании. Конструкция устройства позволяет совместить его с механизмом отсечения трубы на отдельные фрагменты, обеспечивая при этом управление механизмом отсечения от общей системы управления. Кроме того, устройство является простым и надежным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для загибки и отрезки концов трубных спиралей | 1981 |
|
SU986541A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1989 |
|
SU1648592A1 |
| Способ гибки труб и станок для осуществления способа | 2020 |
|
RU2774676C2 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ПРЕДВАРИТЕЛЬНО ОРЕБРЕННЫХ ПРЯМЫХ ТРУБ | 2000 |
|
RU2190817C2 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
Изобретение относится к области обработки металлов давлением, в частности к устройствам для изготовления изогнутых труб. Подаваемую трубу фиксируют в поворотном круге и подают с помощью каретки в отверстие между гибочным шаблоном и гибочным роликом. Обеспечивают плоский или объемный контур изгиба трубы посредством двигателей, связанных с системой управления. Прямолинейные участки между изгибами трубы задают при линейном перемещении каретки, положение которой контролируется датчиком. Рассечение трубы на отдельные участки осуществляют механизмом отсечения. Повышается точность геометрических размеров трубы и расширяются технологические возможности. 10 з.п. ф-лы, 4 ил.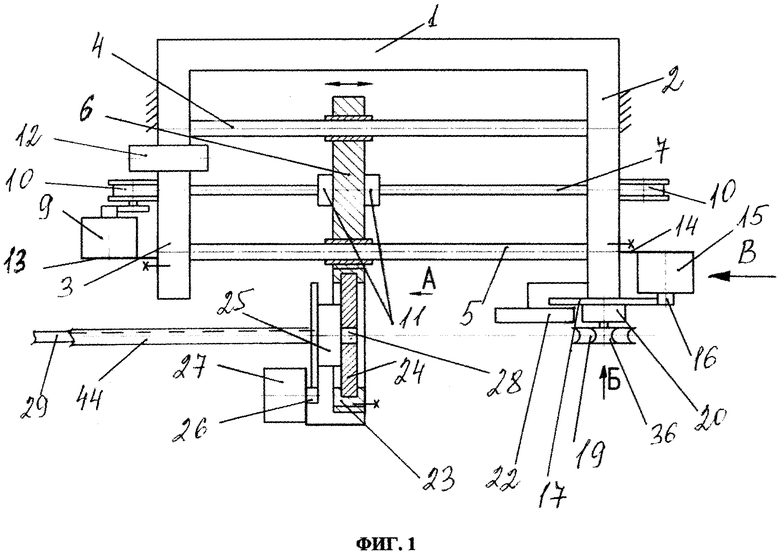
1. Устройство для изготовления изогнутых труб, содержащее станину, каретку, связанную со станиной и установленную с возможностью возвратно-поступательного перемещения, механизм перемещения каретки, механизм изгиба трубы, содержащий два ролика, один из которых является гибочным шаблоном, а второй - гибочным роликом,
отличающееся тем, что
станина в плане выполнена П-образной,
каретка размещена между боковыми сторонами П-образной станины с возможностью контролируемого линейного горизонтального перемещения между ними и жестко связана с подшипником скольжения, в котором в плоскости, перпендикулярной направлению перемещения каретки, установлен поворотный круг с возможностью контролируемого вращения в указанной плоскости от шагового двигателя, при этом в поворотном круге выполнено центральное отверстие для прохождения трубы и фиксации ее положения относительно поворотного круга, механизм изгиба трубы размещен на расстоянии от поворотного круга со стороны выхода из него трубы, гибочный ролик которого установлен с возможностью контролируемого вращения вокруг гибочного шаблона, причем гибочный шаблон и гибочный ролик расположены в плоскости, перпендикулярной плоскости поворотного круга, при этом механизм изгиба выполнен с зубчатым колесом, приводимым во вращение шаговым двигателем, при этом зубчатое колесо и гибочный шаблон имеют общую ось вращения, ось вращения гибочного ролика параллельна оси вращения гибочного шаблона и жестко связана с упомянутым зубчатым колесом, наружные боковые поверхности роликов выполнены вогнутыми, при этом гибочный шаблон и гибочный ролик установлены рядом друг с другом с образованием между обращенными друг к другу наружными боковыми поверхностями отверстия для размещения трубы, расположенного напротив центрального отверстия поворотного круга для обеспечения возможности подачи трубы из центрального отверстия поворотного круга в отверстие между наружными боковыми поверхностями роликов, при этом указанные двигатели связаны с системой управления.
2. Устройство по п. 1, отличающееся тем, что механизм изгиба трубы и поворотный круг размещены за пределами станины.
3. Устройство по п. 1, отличающееся тем, что указанные ролики механизма изгиба выполнены с возможностью их замены.
4. Устройство по п. 1, отличающееся тем, что оно снабжено держателем трубы, жестко связанным с поворотным кругом со стороны подвода трубы к поворотному кругу.
5. Устройство по п. 1, отличающееся тем, что каретка установлена на направляющих, закрепленных между боковыми сторонами П-образной станины, с возможностью перемещения вдоль направляющих.
6. Устройство по п. 1, отличающееся тем, что оно снабжено датчиком, установленным не менее чем на одной из боковых сторон станины для фиксации и контроля положения каретки, соответствующего исходному положению, причем каретка выполнена с возможностью линейного перемещения между боковыми сторонами станины от зубчатого ремня, связанного с кареткой и управляемого шаговым двигателем каретки.
7. Устройство по п. 1, отличающееся тем, что оно снабжено размещенным на поворотном круге со стороны подвода трубы зажимом трубы, содержащим два прижимных элемента, расположенных по периметру центрального отверстия поворотного круга напротив друг друга, при этом первый прижимной элемент выполнен неподвижным и прикреплен к поворотному кругу, а другой прижимной элемент связан с якорем электромагнита или выполнен в виде якоря электромагнита, закрепленного на поворотном круге и связанного с системой управления.
8. Устройство по п. 1, отличающееся тем, что оно снабжено датчиком для фиксации и контроля положение поворотного круга, соответствующего исходному положению.
9. Устройство по п. 1, отличающееся тем, что оно снабжено механизмом отсечения, содержащим отрезной диск, установленным на рычаге, выполненным с возможностью вращения вокруг оси, жестко закрепленной относительно станины, и связанным с пневмоцилиндром для обеспечения поворота рычага вокруг оси вращения, и двигатель, предназначенный для обеспечения вращения отрезного диска и связанный с системой управления.
10. Устройство по п. 1, отличающееся тем, что шаговый двигатель каретки и шаговый двигатель зубчатого колеса жестко связаны со станиной, а шаговый двигатель поворотного круга жестко связан с корпусом каретки, в котором в подшипнике скольжения установлен поворотный круг.
11. Устройство по п. 1, отличающееся тем, что оно снабжено закрепленными на боковой стороне станины, с которой связан механизм изгиба, двумя ограничителями, установленными на расстоянии друг от друга с образованием между ними паза для размещения трубы, причем указанные ограничители установлены со стороны входа трубы в отверстие между наружными боковыми сторонами упомянутых роликов, а паз между ограничителями расположен напротив указанного отверстия.
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| Трубогиб | 1986 |
|
SU1368064A1 |
| Прибор для автоматического измерения коэффициента поглощения спектра | 1953 |
|
SU105204A1 |
| US 5187963 A, 23.02.1993. | |||

