Изобретение относится к области электрических двигателей, а более точно касается пьезоэлектрических шаговых двигателей, и может быть использовано в качестве исполнительного механизма в электротехнике, телемеханике, радиотехнике и автоматике.
Известен пьезоэлектрический двигатель, статор которого содержит пьезоэлектрический полый цилиндр, внутри которого расположен цилиндрический ротор, фрикционно взаимодействующий со статором (Авторское свидетельство СССР N 573828, МКИ H 01 L 41/00).
Однако этот двигатель не может осуществлять линейное перемещение цилиндрического ротора.
Наиболее близким аналогом к предлагаемому изобретению является пьезоэлектрический шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть с рабочим элементом (Авторское свидетельство СССР N 720576, МКИ H 01 L 41/04 - прототип).
Однако этот двигатель имеет сложную конструкцию и осуществляет только линейное перемещение подвижной части и не может обеспечить вращение подвижной части.
В основу предлагаемого изобретения была положена задача создания пьезоэлектрического шагового двигателя, конструктивное выполнение которого позволило бы упростить конструкцию и технологию его изготовления, повысить усилия и точность позиционирования подвижной части при ее вращении, линейном перемещении и при совместном движении (одновременное вращение и линейное перемещение).
Это достигается тем, что в пьезоэлектрическом шаговом двигателе, содержащем корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению, фиксирующие узлы выполнены из не менее двух вращательно-сдвигающе-фиксирующих пьезоблоков, которые расположены внутри корпуса в продольной плоскости друг за другом, причем каждый пьезоблок выполнен из вращательного пьезоэлемента, сдвигающего пьезоэлемента, фиксирующего пьезоэлемента и фрикционного элемента, разделенных изоляторами, а промежутки между пьезоблоками заполнены эластичным изоляционным материалом.
Далее изобретение поясняется описанием конкретного примера его выполнения и прилагаемыми чертежами, на которых:
фиг. 1 изображает пьезоэлектрический шаговый двигатель, вид спереди;
фиг. 2 - то же, продольный разрез;
фиг. 3 - 8 - такты работы пьезоэлектрического шагового двигателя при линейном перемещении подвижной части, продольный разрез;
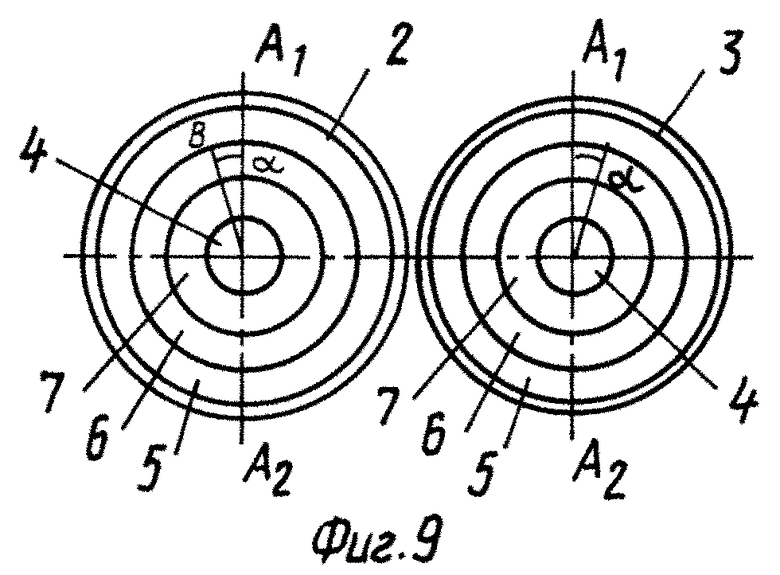
фиг. 9 - первый такт работы двигателя при вращении подвижной части, поперечные разрезы двух пьезоблоков;
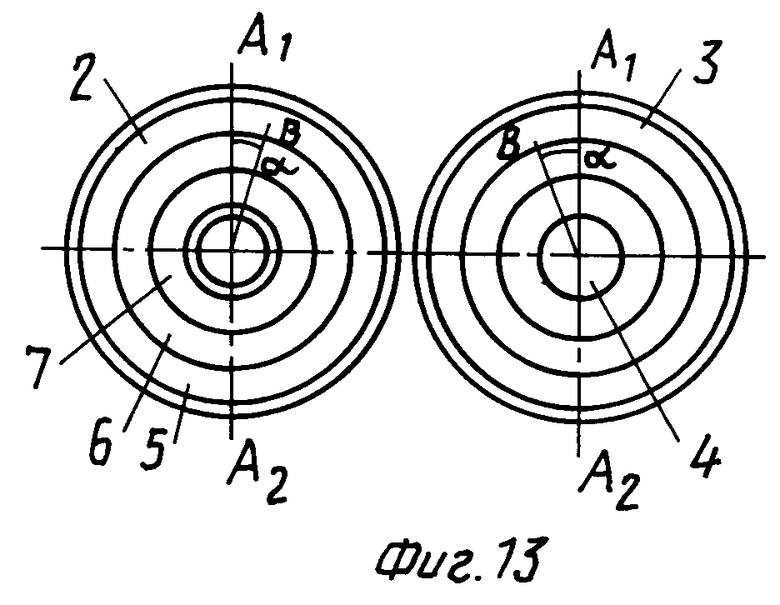
фиг. 10-14 - остальные такты работы пьезоэлектрического шагового двигателя при вращении подвижной части.
Пьезоэлектрический шаговый двигатель содержит цилиндрический корпус 1 (фиг. 1 и 2), фиксирующие узлы в виде двух пьезоблоков 2 и 3 и подвижную часть 4, выполненную в виде цилиндрического стержня. Пьезоблоки 2 и 3 являются вращательно-сдвигающе-фиксирующими. Каждый пьезоблок состоит из соединенных между собой (например, склеенных) вращательного пьезоэлемента 5, сдвигающего пьезоэлемента 6, фиксирующего пьезоэлемента 7, изоляторов 8 и фрикционного элемента 9. Вращательный пьезоэлемент 5 осуществляет поворот подвижной части 4 вокруг собственной оси и вектор его начальной поляризации направлен под углом к продольной плоскости двигателя. Сдвигающий пьезоэлемент 6 имеет вектор начальной поляризации, направленный под углом к продольной оси двигателя и осуществляет перемещение подвижной части 4 вдоль продольной оси двигателя.
Фиксирующий пьезоэлемент 7 производит фиксацию подвижной части 4, вектор его начальной поляризации направлен (радиально) перпендикулярно продольной оси двигателя.
Фрикционные элементы 9 выполнены в виде разрезного кольца, что обеспечивает более плотное обжатие подвижной части 4 фиксирующими пьезоэлементами 7 пьезоблоков 2 и 3.
Каждый пьезоэлемент имеет электроды, к которым подключены провода (эти элементы на чертеже не показаны).
Промежутки между пьезоблоками 2 и 3 заполнены эластичным изоляционным материалом 10.
Двигатель работает следующим образом.
При подаче на электроды вращательного пьезоэлемента 5 (фиг. 9) положительного напряжения за счет обратного пьезоэффекта происходит поворот внутренней части кольца против часовой стрелки на угол α относительно диаметральной линии A1 А2, а при подаче отрицательного напряжения осуществляется поворот внутренней части по часовой стрелке на угол α относительно диаметральной линии A1 A2. При подаче на электроды сдвигающих пьезоэлементов 6 положительного напряжения за счет обратного пьезоэффекта происходит сдвиг внутренней части влево относительно внешней части кольца, а при подаче отрицательного напряжения - сдвиг внутренней части вправо относительно внешней части кольца. При подаче положительного напряжения на электроды фиксирующего пьезоэлемента 7 происходит обжим им подвижной части 4, а при подаче отрицательного напряжения он отжимается от подвижной части 4.
Пьезоэлектрический шаговый двигатель может осуществлять различные виды движений: линейное перемещение подвижной части; вращательное движение; совместно линейное и вращательное движение; различные комбинации этих движений.
Рабочий цикл двигателя состоит из шести тактов.
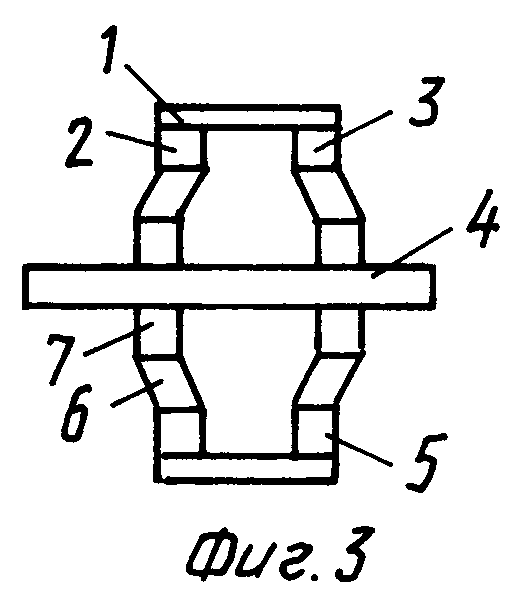
Работа двигателя в режиме линейного перемещения подвижной части показана на фиг. 3-8. При этом в работе участвуют сдвигающие пьезоэлементы 6 пьезоблоков 2 и 3 и фиксирующие пьезоэлементы 7 тех же пьезоблоков.
Первому такту соответствует положение пьезоэлементов 6 и 7 пьезоблоков 2 и 3, показанное на фиг. 3. На пьезоэлементы 6 и 7 пьезоблока 2 и на пьезоэлемент 7 пьезоблока 3 подано положительное напряжение, а на пьезоэлемент 6 пьезоблока 3 - отрицательное напряжение, при этом пьезоэлемент 6 пьезоблока 2 смещен влево, пьезоэлемент 6 пьезоблока 3 смещен вправо. Фиксирующие пьезоэлементы 7 пьезоблоков 2 и 3 зажимают подвижную часть 4. Вращательные пьезоэлементы 5 не участвуют в линейном перемещении и могут занимать любое положение, которое не изменяется во время работы двигателя в режиме линейного перемещения.
Во втором такте на фиксирующий пьезоэлемент 7 (фиг. 4) пьезоблока 3 подается отрицательное напряжение, при этом он отжимается от подвижной части 4.
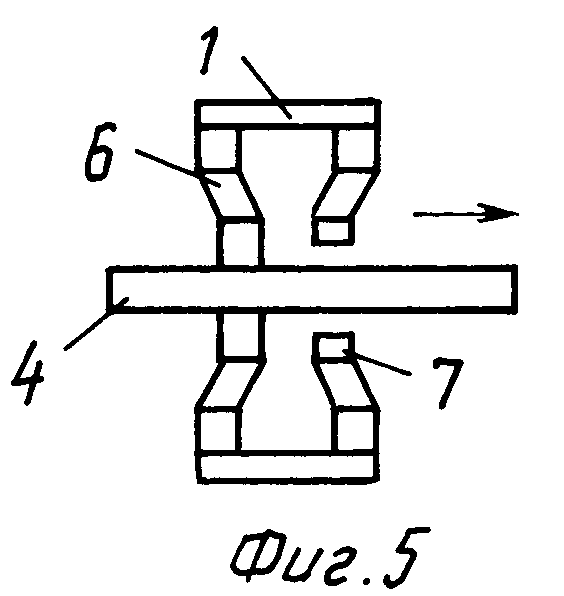
В третьем такте на сдвигающий пьезоэлемент 6 (фиг. 5) пьезоблока 2 подается отрицательное напряжение и он, смещаясь вправо, перемещает фиксирующий пьезоэлемент 7 и подвижную часть 4 на один шаг. Одновременно на сдвигающий пьезоэлемент 5 пьезоблока 3 подается положительное напряжение и он смещается совместно с фиксирующим пьезоэлементом 7 влево.
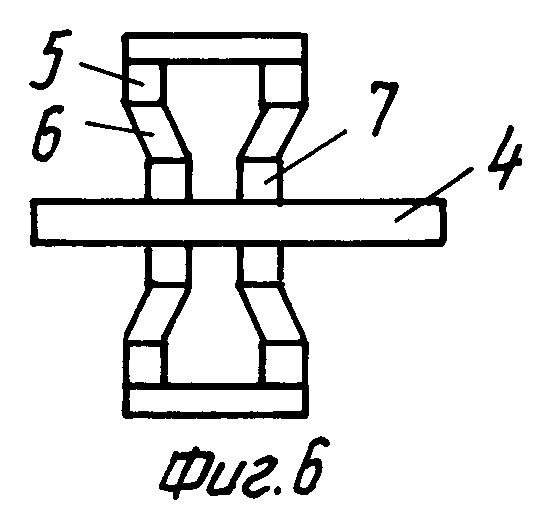
В четвертом такте положительное напряжение подается на фиксирующий пьезоэлемент 7 (фиг. 6) пьезоблока 3, который обжимает подвижную часть 4.
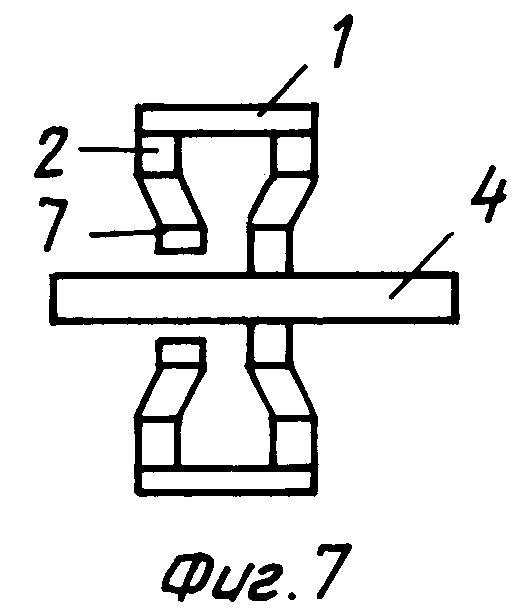
В пятом такте на фиксирующий пьезоэлемент (фиг. 7) пьезоблока 2 подается отрицательное напряжение и он отжимается от подвижной части 4.
В шестом такте пьезоблоки 2 (фиг. 8) и 3 расходятся, т. е. на электроды сдвигающего пьезоэлемента 6 пьезоблока 2 подается положительное напряжение и он смещается влево, а на сдвигающий пьезоэлемент 6 пьезоблока 3 подается отрицательное напряжение и он совместно с фиксирующим пьезоэлементом 7 и подвижной частью 4 смещается вправо. Происходит перемещение подвижной части 4 еще на один шаг. На этом рабочий цикл завершается, подвижная часть переместилась на два шага.
Далее процесс линейного перемещения продолжается в той же последовательности.
При вращении подвижной части 4 работа двигателя осуществляется по схеме, представленной на фиг. 9-14.
На фиг. 9 изображено положение, соответствующее первому такту. В работе участвуют вращательные пьезоэлементы 5 и фиксирующие пьезоэлементы 7 пьезоблоков 2 и 3. Пьезоэлементы 6 в работе не участвуют и могут занимать любое положение, которое не изменяется в процессе работы. На пьезоэлементы 5 и 7 пьезоблока 2 подано положительное напряжение, при этом вращательный пьезоэлемент 5 смещает фиксирующий пьезоэлемент 7 на угол α против часовой стрелки, пьезоэлемент 7 зажимает подвижную часть 4. На вращательный пьезоэлемент 5 пьезоблока 3 подано отрицательное напряжение, при этом он смещает фиксирующий пьезоэлемент 7 на угол α против часовой стрелки, пьезоэлемент 7 зажимает подвижную часть 4.
Во втором такте на фиксирующий пьезоэлемент 7 (фиг. 10) пьезоблока 3 подается отрицательное напряжение, при этом он отжимается от подвижной части 4.
В третьем такте отрицательное напряжение подается на вращательный пьезоэлемент 5 (фиг. 11) пьезоблока 2, который поворачивает совместно фиксирующий пьезоэлемент 7 и подвижную часть 4 на угол 2α по часовой стрелке. При этом на вращательный пьезоэлемент 5 пьезоблока 3 подается положительное напряжение и происходит сдвиг фиксирующего пьезоэлемента 7 на угол 2α против часовой стрелки.
В четвертом такте на фиксирующий пьезоэлемент 7 (фиг. 12) пьезоблока 2 подается положительное напряжение и он обжимает подвижную часть 4.
В пятом такте на фиксирующий пьезоэлемент 7 (фиг. 13) пьезоблока 2 подается отрицательное напряжение и он отжимается от подвижной части 4.
В шестом такте положительное напряжение подается на вращательный пьезоэлемент 5 пьезоблока 2, который смещается на угол 2α против часовой стрелки. На вращательный пьезоэлемент 5 пьезоблока 3 подается отрицательное напряжение и он поворачивает подвижную часть 4 на угол 2α по часовой стрелке.
За один рабочий цикл подвижная часть 4 поворачивается на угол 4α. Далее происходит повторение циклов, при этом подвижная часть 4 вращается по часовой стрелке.
Для осуществления реверса необходимо изменить порядок подачи напряжения на фиксирующие пьезоэлементы.
Предлагаемый пьезоэлектрический шаговый двигатель имеет простую конструкцию и технологию изготовления, небольшие габаритные размеры и массу, большое усилие на подвижной части и большой крутящийся момент, а также позволяет совмещать линейное движение подвижной части и ее вращение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167486C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2153219C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167489C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| УСТРОЙСТВО ДЛЯ БЕЗОПИЛОЧНОГО РЕЗАНИЯ ДРЕВЕСИНЫ | 1994 |
|
RU2084333C1 |
| УЛЬТРАЗВУКОВОЙ УТЮГ | 1995 |
|
RU2083745C1 |
| ТОПЛИВНЫЙ БАК | 1994 |
|
RU2086426C1 |
| МАССАЖНАЯ ЩЕТКА | 1995 |
|
RU2112493C1 |







Изобретение относится к пьезоэлектрическим двигателям, которые могут быть использованы в качестве исполнительных механизмов. Пьезоэлектрический шаговый двигатель содержит корпус с закрепленными в нем фиксирующими узлами и подвижную часть. Фиксирующие узлы выполнены из не менее двух вращательно-сдвигающе-фиксирующих пьезоблоков, которые расположены внутри корпуса в продольной плоскости друг за другом. Каждый пьезоблок выполнен из вращательного пьезоэлемента, сдвигающего пьезоэлемента, фиксирующего пьезоэлемента и фрикционного элемента, разделенных изоляторами. Промежутки между пьезоблоками заполнены эластичным изоляционным материалом. Технический результат - упрощение конструкции и технологии изготовления, повышение усилия и точности позиционирования. 14 ил.
Пьезоэлектрический шаговый двигатель, содержащий корпус, с закрепленными в нем фиксирующими узлами и подвижную часть, отличающийся тем, что фиксирующие узлы выполнены из не менее двух вращательно-сдвигающе-фиксирующих пьезоблоков, которые расположены внутри корпуса в продольной плоскости друг за другом, причем каждый пьезоблок выполнен из вращательного пьезоэлемента, сдвигающего пьезоэлемента, фиксирующего пьезоэлемента и фрикционного элемента, разделенных изоляторами, а промежутки между пьезоблоками заполнены эластичным изоляционным материалом.
| УСТРОЙСТВО для КЛАССИФИКАЦИИ ЗЕРНИСТЫХ МАТЕРИАЛОВ | 0 |
|
SU360975A1 |
| Пьезоэлектрический линейный шаговый двигатель | 1977 |
|
SU720576A1 |
| Ультразвуковой линейный шаговый двигатель | 1974 |
|
SU502426A1 |
| Пьезоэлектрический двигатель | 1976 |
|
SU573828A1 |
| US 5136201, 04.08.1992 | |||
| Резец с креплением режущей пластинки силами резания | 1957 |
|
SU112454A1 |

