Предлагаемое изобретение относится к рыбной промышленности и может быть применено в технологических процессах, реализуемых с применением рыборазделочных машин. Разделка рыбы представляет собой процесс определенного взаимодействия рабочего органа (например, ножа) с объектом обработки, т.е. с рыбой. Взаимодействие рабочего органа с рыбой осуществляется по одному из двух вариантов: 1) когда нож занимает в пространстве фиксированное положение, а рыба подается в положение для взаимодействия с ножом; 2) когда рыба занимает предварительно ориентированное положение, а нож перемещается в положение для сопряжения с рыбой. В практике рыборазделки рыб средних размеров более широкое применение находит второй вариант взаимодействия рабочего органа с рыбой.
Известны, например, кинематические схемы ряда механизмов настройки рабочих органов рыборазделочных машин, используемых при разделке рыб различных видов (Пазенко В.Т. Механизмы настройки рабочих органов рыборазделочных машин. - М.: Пищ. пром-сть, 1966).
Основным недостатком данных систем настройки рабочих органов является усложненность схем их обмеряющих и настраивающих (исполнительных) механизмов, содержащих большое число подвижных звеньев (движущихся масс) и кинематических пар. Это снижает точность настройки рабочих органов, ограничивает скорости движения звеньев, уменьшает частоту повторения рабочих циклов и производительность рыборазделочных машин.
Известно также устройство для автоматической настройки ножа на линию резания, применяемое в машине проекта 407 для разделки сельди, в котором используется косвенный метод измерения - зависимость между длиной головы и толщиной рыбы в районе линии резания (Романов А.А. Основные направлении создания и совершенствования рыборазделочных машин. Обзорная информация. Серия 4. Технологическое оборудование рыбной промышленности, выпуск 2. - М., 1979. - С.56).
Данное устройство содержит обмеряющий механизм в виде укрепленного на оси одноплечего рычага - скользящей планки для измерения толщины рыбы, движущейся в кассетах транспортера, передающий механизм в виде рычага с роликом, укрепленного на оси обмеряющего рычага, исполнительный механизм в виде поворотного кронштейна с корпусом для ножевого вала и паза для взаимодействия с роликом рычага передающего механизма и привод.
Основным недостатком устройства является невысокая точность настройки ножа на линию резания и потери пищевого рыбного сырья. При работе устройства не обеспечивается перпендикулярного положения ножевого диска относительно хребтовой кости обрабатываемой рыбы. При настройке ножа на линию резания он совершает движение по дугообразной траектории, кривизна которой зависит от длины поворотного кронштейна. Такое положение плоскости резания приводит к потере пищевого рыбного сырья, поскольку вместе с головами рыб в отходы идет часть пищевого сырья. Потери сырья растут с увеличением размеров обрабатываемой рыбы. Устройство не отличается компактностью, наличие поворотного кронштейна увеличивает его габариты.
Известно также устройство для автоматической настройки ножа рыборазделочной машины на линию реза обрабатываемой рыбы, содержащее кинематически связанные обмеряющий механизм в виде вертикально расположенного толкателя со щупом для взаимодействия с рыбой, передающий механизм в виде системы зубчатых колес и реек и исполнительный механизм с выходным звеном - ножевым валом, кинематически связанным с валом привода (пат. 2379897 РФ, опубл. в БИПМ 27.01.2010. - №3. - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является усложненность кинематической цепи передающего механизма. Большое число кинематических пар механизма не способствует повышению скоростей движения звеньев и частоты повторения рабочих циклов, т.е. ограничивает производительность устройства.
Задачей настоящего изобретения является повышение точности настройки рабочего органа - ножа на линию реза обрабатываемой рыбы и производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве для автоматической настройки ножа рыборазделочной машины, содержащем обмеряющий механизм в виде вертикально расположенного толкателя со щупом для измерения толщины рыбы, передающий механизм, исполнительный механизм с рабочим органом - ножом, закрепленным на ножевом валу, кинематически связанном с валом привода, передающий механизм содержит ведущее звено в виде плиты с пазом, закрепленной на толкателе обмеряющего механизма, и выходное звено в виде стержня, смонтированного в направляющих, параллельных ножевому валу, при этом один конец выходного звена подвижно сопряжен с пазом ведущего звена, другой - с ножевым валом.
На выходном звене передающего механизма под прямым углом к его продольной оси закреплены пальцы для подвижного сопряжения с направляющими, при этом последние выполнены прямолинейными и жестко связаны со стойкой.
Сопряжение выходного звена передающего механизма с ведущим звеном содержит ролик, ось вращения которого совпадает с продольной осью выходного звена.
Сопряжение выходного звена передающего механизма с ножевым валом содержит закрепленный на ножевом валу диск и сопряженную с ним вилку, закрепленную на конце выходного звена.
Выполнение ведущего звена передающего механизма в виде плиты с пазом, закрепленной на толкателе обмеряющего механизма, а выходного звена в виде стержня, подвижно сопряженного одним концом с пазом ведущего звена, а другим - с ножевым валом, позволяет обеспечивать возвратно-поступательное движение выходного звена в горизонтальной плоскости (в направлении движения ножевого вала). В сравнении с прототипом предлагаемое устройство содержит минимальное число подвижных звеньев и кинематических пар. Это повышает точность настройки ножа на линию реза рыбы, снижает энергозатраты на перемещение движущихся масс (звеньев), повышает производительность.
Продольная ось выходного звена передающего механизма, оси пальцев, закрепленных на выходном звене, и продольная ось ножевого вала лежат в одной плоскости. Это исключает возможность заклинивания конструктивных элементов устройства и увеличения сил трения. Для исключения перекосов на выходном звене предпочтительно иметь не менее двух пальцев.
Использование ролика в сопряжении выходного звена передающего механизма с пазом ведущего звена (в высшей кинематической паре) является наиболее простым конструктивным решением.
Выполнение сопряжения выходного звена передающего механизма с ножевым валом исполнительного механизма посредством подвижно связанных вилки, закрепленной на конце выходного звена, и диска, закрепленного на ножевом валу, является наиболее простым решением в кинематической связи выходного звена, совершающего движения в горизонтальной плоскости вместе с ножевым валом, совершающим сложное движение - вращательное и возвратно-поступательное. Диск на ножевом валу может быть закреплен жестко либо подвижно на кольцевой выточке в теле вала. Оба варианта крепления диска на валу являются работоспособными.
Заявляемое устройство отличается от прототипа конструктивными элементами, связью между элементами, формой выполнения взаимного расположения элементов. Эти отличия способствуют повышению точности работы устройства при настройке рабочего органа рыборазделочной машины, сводят к минимуму потери пищевого сырья на операции отрезания голов у обрабатываемых рыб, способствуют повышению производительности.
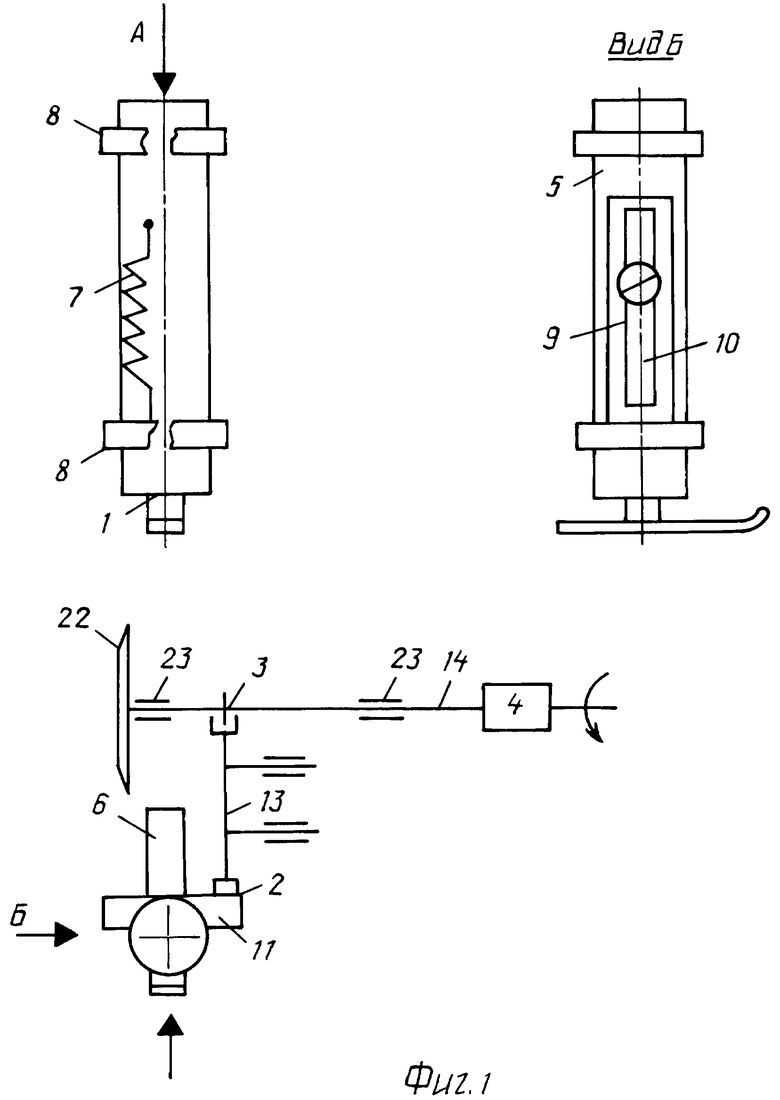
Предлагаемое устройство для автоматической настройки ножа рыборазделочной машины поясняется чертежами: на фиг.1 представлена кинематическая схема устройства, на фиг.2 - отдельные элементы устройства.
Устройство для автоматической настройки ножа рыборазделочной машины содержит обмеряющий механизм 1, передающий механизм 2, исполнительный механизм 3 и привод 4.
Обмеряющий механизм 3 включает вертикально расположенный толкатель 5, щуп 6 и силовой упругий элемент 7. Толкатель 5 установлен в неподвижных направляющих 8, силовой упругий элемент 7 выполнен в виде пружины растяжения, один конец которой закреплен на толкателе, другой - на направляющей 8. На толкателе 5 укреплен пластинчатый ограничитель 9 с продольным пазом 10 для фиксирования толкателя в заданном нижнем положении, при котором щуп 6 отстоит от поверхности дна кассеты транспортера на расстоянии, равном толщине рыбы минимальной длины. Фиксированное положение ограничителя 9 на толкателе обеспечивается посредством пальца с резьбовым концом, сопрягаемого с пазом 10 в теле ограничителя и с резьбовым отверстием в толкателе. При отсутствии рыбы под щупом 6, либо при нахождении под щупом рыбы минимальной длины, пружина 7 поджимает ограничитель 9 к неподвижной направляющей 8, при этом толкатель 5 оказывается в нижнем положении.
Передающий механизм 2 включает ведущее звено 11 в виде плиты с пазом 12, закрепленной на толкателе 5 обмеряющего механизма, и выходное звено 13, выполненное в виде стержня, один конец которого подвижно сопряжен с пазом 12, другой - с ножевым валом 14 устройства. Звено 13 смонтировано в неподвижных прямолинейных направляющих 15 и 16, параллельных ножевому валу. Сопряжение выходного звена с направляющими 15 и 16 обеспечивается посредством пальцев 17 и 18, закрепленных на выходном звене перпендикулярно его продольной оси.
Сопряжение выходного звена 13 с пазом 12 ведущего звена 11 содержит ролик 19, ось вращения последнего совпадает с продольной осью выходного звена.
Подвижное сопряжение выходного звена 13 с ножевым валом 14 содержит вилку 20, закрепленную на конце выходного звена и сопряженную с диском 21 на ножевом валу.
Исполнительный механизм 3 включает ножевой вал 14 с закрепленными на нем диском 21 и рабочим органом - ножом 22, смонтированный в неподвижных прямолинейных направляющих 23 с возможностью возвратно-поступательного движения. На одном конце ножевого вала закреплен нож 22, другой конец вала сопряжен с выходным валом привода 4 посредством шлицевого соединения. Сопряжение валов содержит шлицевые зубья в концевой части вала привода и канавки для зубьев в концевой части ножевого вала.
Устройство для автоматической настройки ножа рыборазделочной машины работает следующим образом.
Предварительно устанавливают пластинчатый ограничитель 9 в положение, при котором расстояние между щупом 6 и поверхностью дна кассеты будет равным толщине рыбы минимальной длины. Рыба укладывается в кассеты транспортера с упором в планку так, чтобы ее приголовок при обмере оказался под щупом. При работе привода 4 ножевой вал 14 обеспечивает вращение дискового ножа 22 с частотой, близкой n=10 с-1 (600 об/мин).
При обработке рыбы минимальной длины вращающийся дисковый нож не совершает поступательного движения, поскольку он предварительно установлен на линию реза рыбы такой длины, а щуп 6 при этом не взаимодействует с рыбой. В результате, отрезанию головы рыбы минимальной длины не предшествует поступательное движение ножа.
При обработке рыбы, длина которой больше минимальной, щуп 6 взаимодействует с рыбой по всей его длине, при этом в результате действия передающего механизма вал 14 с ножом 22 совершает поступательное движение и в момент окончания взаимодействия щупа с рыбой нож оказывается на линии отрезания головы данного экземпляра рыбы. По окончании реза взаимодействие ножа с рыбой прекращается, пружина 7 возвращает толкатель 5 в крайнее нижнее положение, при этом выходное звено 13 передающего механизма, взаимодействуя с пазом 12 ведущего звена 11, совершает обратный ход, возвращая вал 14 с ножом в начальное положение.
В процессе отрезания головы рыбы положение ножа на линии резания обеспечивается влиянием на его боковые поверхности усилий от массы обрабатываемой рыбы, занимающей фиксированное положение в кассете транспортера. По окончания реза действие этих сил прекращается и сила пружины 7 становится достаточной для возвращения толкателя 5 в нижнее положение.
Поступательное движение ножевого вала 14 при прямом и обратном ходах осуществляется следующим образом. При прямом (рабочем) ходе, т.е. при взаимодействии щупа 6 с рыбой, толкатель 5 совершает подъемное движение, при этом ведущее звено 11 передающего механизма 2 с пазом 12 генерирует поступательное движение выходного звена 13 и кинематически связанного с ним ножевого вала 14 с ножом 22. При обратном (холостом) ходе, т.е. при отсутствии рыбы под щупом 6, толкатель 5 совершает опускное движение, при этом генерируется поступательное движение выходного звена 13 и ножевого вала 14 в обратном направлении.
Поступательное движение выходного звена 13 и ножевого вала 14 в горизонтальной плоскости при прямом и обратном ходах обеспечивается взаимодействием пальцев 17 и 18, закрепленных на выходном звене, с направляющими 15 и 16.
В предлагаемом устройстве реализуется косвенный метод измерения, в соответствии с которым длину головы рыбы определяют по толщине рыбы в месте ее приголовка. Метод базируется на постоянстве отношений между отдельными частями тела рыб одного вида. В соответствии с этим обмер рыбы ведут по толщине рыбы, а нож настраивают на линию резания по длине головы. Численно эти параметры не являются равными, но их отношения для рыб одного вида оказываются постоянными. Так, например, для сельди североатлантической свежей имеем

где α - биологический коэффициент;
Н - толщина рыбы в месте приголовка;
lг - длина головы рыбы.
В предлагаемом устройстве преобразование значения толщины рыбы, полученного в результате ее обмера, в соответствующее значение длины головы обеспечивается передающим и исполнительным механизмами. Линейный ход ножевого вала 14 не равен линейному ходу толкателя 5. Из зависимости (1) следует, что ход ножевого вала с рабочим органом должен быть равен
Если принять толщину тела рыбы равной, например, 3,8 см, то ход ножевого вала должен составлять lг=3,8:0,52=7,3 см.
При подаче под щуп 6 рыбы, длина которой больше минимальной, толкатель 5 совершает подъемное движение на величину ST, равную ходу толкателя, при этом ход ножевого вала будет равен длине головы lг обмеряемого экземпляра рыбы. Выполнение этого условия достигается в результате того, что тангенс угла β наклона рабочего профиля паза 12 ведущего звена 11 численно равен биологическому коэффициенту α для рыб обрабатываемого вида. Имеем
Следовательно, угол β наклона паза 12 в теле ведущего звена 11 должен быть
β=arctgα.
Зная значение биологического коэффициента α, можно оперативно выполнить переналадку предлагаемого устройства на обработку рыб других видов. Переналадка предполагает наличие (набор) звеньев 11 с пазами 12, рабочие профили которых выполнены для различных значений коэффициента α, т.e. для рыб различных видов.
Применение предлагаемого устройства в рыбообработке обеспечит повышение точности настройки ножей рыборазделочных машин, уменьшит потери пищевого рыбного сырья, повысит производительность машин. Устройство применимо для обработки рыб различных видов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2011 |
|
RU2478293C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2008 |
|
RU2379897C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2008 |
|
RU2386257C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2010 |
|
RU2447666C1 |
| Устройство для ориентированной подачи рыбы к режущим инструментам | 1990 |
|
SU1750581A1 |
| Устройство для ориентирования рыбы на линию отрезания головы | 1973 |
|
SU519183A1 |
| Устройство для фиксации рыбы по линии отрезания головы | 1977 |
|
SU659126A1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2014 |
|
RU2573362C1 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1996 |
|
RU2125005C1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2206479C2 |
Изобретение относится к рыбной промышленности. Устройство содержит обмеряющий, передающий и исполнительный механизмы и привод. Обмеряющий механизм включает вертикально расположенный толкатель, щуп и силовой упругий элемент. Толкатель установлен в неподвижных направляющих, щуп смонтирован на нижнем конце толкателя, силовой упругий элемент - пружина растяжения одним концом закреплен на толкателе, другим - на неподвижной направляющей. Передающий механизм включает ведущее звено в виде плиты с фигурным пазом, закрепленной на толкателе обмеряющего механизма, и выходное звено в виде стержня, один конец которого подвижно сопряжен с пазом ведущего звена, другой - с ножевым валом. Изобретение позволяет сократить потери сырья. 3 з.п. ф-лы, 2 ил.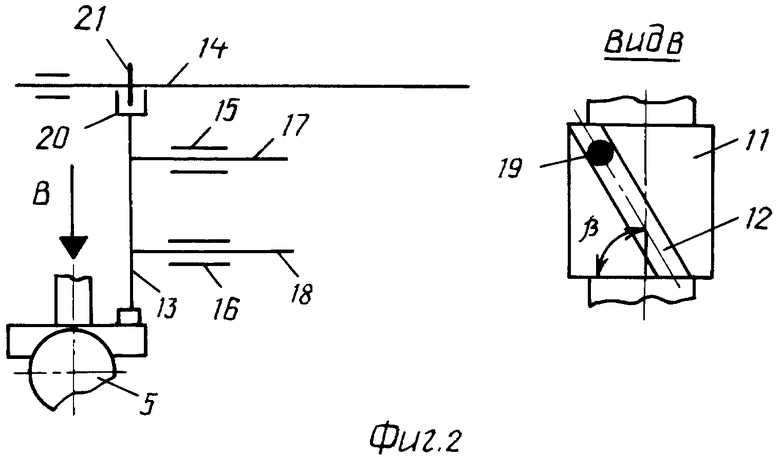
1. Устройство для автоматической настройки ножа рыборазделочной машины, содержащее обмеряющий механизм в виде вертикально расположенного толкателя со щупом для измерения толщины рыбы, передающий механизм, исполнительный механизм с рабочим органом - ножом, закрепленным на ножевом валу, кинематически связанном с валом привода, отличающееся тем, что передающий механизм содержит ведущее звено в виде плиты с пазом, закрепленной на толкателе обмеряющего механизма, и выходное звено в виде стержня, смонтированного в направляющих, параллельных ножевому валу, при этом один конец выходного звена подвижно сопряжен с пазом ведущего звена, другой - с ножевым валом.
2. Устройство по п.1, отличающееся тем, что на выходном звене передающего механизма под прямым углом к его продольной оси закреплены пальцы для подвижного сопряжения с направляющими, при этом последние выполнены прямолинейными и жестко связаны со стойкой.
3. Устройство по п.1, отличающееся тем, что сопряжение выходного звена передающего механизма с ведущим звеном содержит ролик, ось вращения которого совпадает с продольной осью выходного звена.
4. Устройство по п.1, отличающееся тем, что сопряжение выходного звена передающего механизма с ножевым валом содержит закрепленный на ножевом валу диск и сопряженную с ним вилку, закрепленную на конце выходного звена.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ | 2008 |
|
RU2379897C1 |
| Устройство для обезглавливания рыбы | 1970 |
|
SU374893A1 |
| Романов А.А | |||
| Основные направления создания и совершенствования рыборазделочных машин | |||
| Обзорная информация, Серия 4, Технологическое оборудование рыбной промышленности, выпуск 2 | |||
| - М., 1974. | |||

