Предлагаемое изобретение относится к области авиации, в частности к вертолетостроению, и направлено на создание вертоплана - винтокрылого летательного аппарата с авторотирующим преобразуемым в крыло несущим винтом, взлетом-посадкой без разбега-пробега, увеличенными величинами крейсерской скорости, аэродинамического качества и дальности полета по сравнению с вертолетом, винтокрылом и известным винтокрылым летательным аппаратом [1].
По совокупности отличительных признаков наиболее близким является техническое решение винтокрылого летательного аппарата с авторотирующим несущим винтом и крылом [1].
В известном техническом решении винтокрылый летательный аппарат имеет авторотирующий несущий винт и крыло, турбовинтовые двигатели с реверсивными воздушными винтами изменяемого шага, фюзеляж, хвостовое оперение самолетного типа и вертолетно-самолетную систему управления. Несущий винт предназначен для обеспечения взлета-посадки без разбега-пробега, а крыло предназначено для осуществления максимальной разгрузки несущего винта на больших скоростях полета.
При этом вращающийся несущий винт на крейсерской скорости полета имеет существенно меньшее аэродинамическое качество по сравнению с аэродинамическим качеством крыла. Кроме того, для вращения несущего винта требуются нерациональная затрата энергии набегающего потока воздуха и мощности двигателей. Вследствие этого аэродинамическое качество данной системы с вращающимся несущим винтом оказывается меньше чем аэродинамическое качество крыла.
Следовательно, для получения максимума аэродинамического качества этой системы необходимо вращение несущего винта в полете остановить, преобразовав его в крыло с минимальным значением углов установки лопастей для минимизации создаваемой ими подъемной силы и их аэродинамического сопротивления. Наиболее приемлемым для осуществления такого преобразования является авторотирующий несущий винт с жестким креплением лопастей к втулке.
Известно [2], что мощность двигателей на единицу взлетного веса вертикально взлетающих летательных аппаратов составляет: для вертолетов 0,25…0.3 л.с./кгс, для реактивных самолетов 3…4 л.с./кгс (эквивалентная мощность). Следовательно, альтернатива несущему винту в части минимума затрат мощности двигателей на единицу взлетного веса летательного аппарата вертикального взлета-посадки не существует.
Поэтому для вертоплана целесообразно воспользоваться положительным эффектом, который может дать комбинация несущий винт - подъемно-маршевые двигатели для повышения его взлетно-посадочных характеристик по сравнению с известным винтокрылым летательным аппаратом [1]. Для этого турбовинтовые двигатели с тянущими винтами изменяемого шага необходимо заменить турбовентиляторными двигателями, оснащенными реверсивно-девиаторными устройствами [3].
Реверсивные устройства турбовентиляторных двигателей применяются для торможения аппарата и уменьшения его посадочной скорости, подобно реверсу винтов изменяемого шага турбовинтовых двигателей на известном винтокрылом летательном аппарате. Девиаторы - поворотные сопла турбовентиляторных двигателей используют для их отклонения в сторону поверхности площадки на заданный угол на взлете-посадке с целью создания вертикальной составляющей тяги, дополняющей тягу несущего винта.
Задачей, на решение которой направлено предлагаемое техническое решение, является создание вертоплана с авторотрующим преобразуемым в крыло (двух, трех, четырехлопастным) несущим винтом для минимизации аэродинамического сопротивления системы несущий винт-крыло с целью достижения более высоких значений крейсерской скорости, аэродинамического качества и дальности полета по сравнению с вертолетом, винтокрылом и известным винтокрылым летательным аппаратом [1]. Кроме того, вертоплан по сравнению с этим винтокрылым летательным аппаратом должен иметь более высокие взлетно-посадочные характеристики.
Технический результат обеспечивается тем, что в известном винтокрылом летательном аппарате, содержащем авторотирующий несущий винт, турбовинтовые двигатели с воздушными реверсивными винтами изменяемого шага, крыло, фюзеляж, хвостовое оперение самолетного типа, самолетно-вертолетную систему управления, авторотирующий несущий винт с жестким креплением лопастей выполнен преобразуемым в крыло, двигатели турбовентиляторного типа выполнены с реверсивно-девиаторными устройствами.
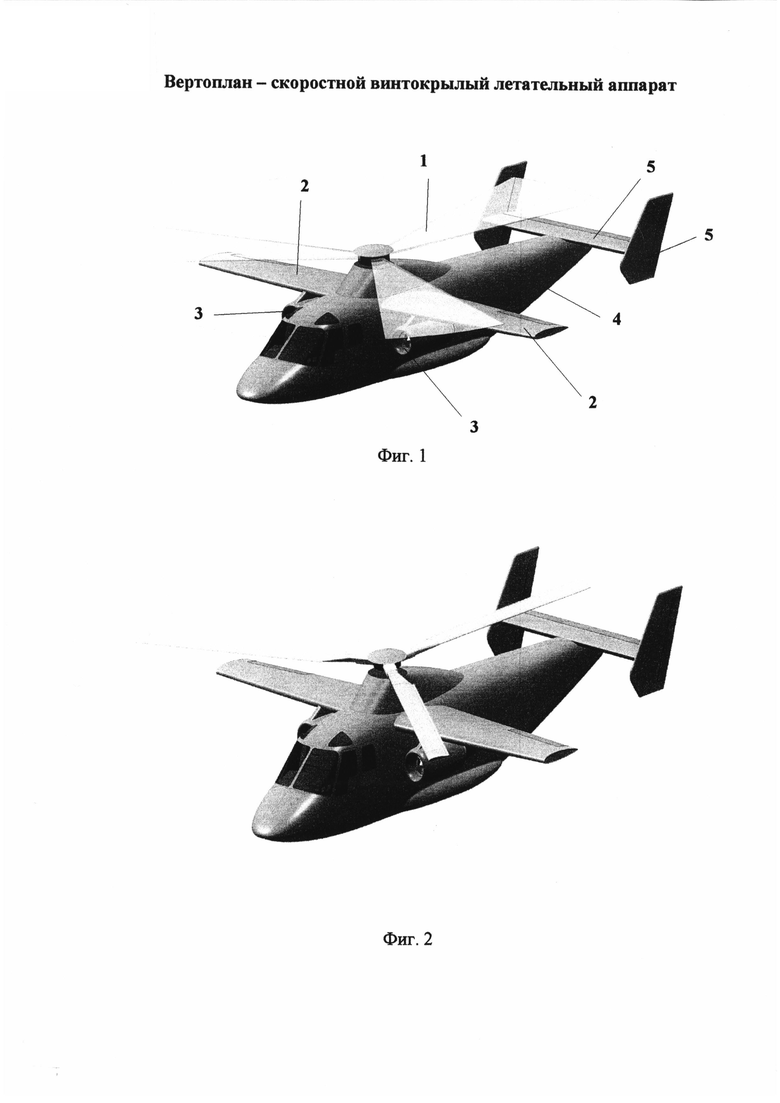
Техническое решение изобретения поясняется чертежом фиг. 1. На фиг. 1 схематично изображен вертоплан в полете с вращающимся трехлопастным (для примера) несущим винтом. Вертоплан содержит авторотирующий несущий винт с жестким креплением лопастей 1, крыло 2, турбовентиляторные двигатели 3, фюзеляж 4, хвостовое оперение 5. На фиг. 2 вертоплан представлен в полете с преобразованным в крыло несущим винтом.
Полет вертоплана осуществляется следующим образом.
Перед взлетом вертоплана без разбега, как и на известном винтокрылом летательном аппарате, на старте осуществляют раскрутку аторотирующего несущего винта 1 до заданной частоты вращения с целью приобретения им необходимого запаса кинетической энергии.
После этого с использованием известной системы управления увеличением общего шага и тяги несущего винта 1 выполняют вертикальный подъем аппарата до отрыва колес шасси от поверхности площадки. Затем, практически одновременно, переводят рычаги управления турбовентиляторными двигателями (РУД) во взлетное положение и производят разгон аппарата до достижения заданных значений скорости и высоты на взлете.
Все рекомендации по реализации данного способа взлета [4] применимы в полном объеме в том случае, если препятствия в направлении взлета не превышают по высоте нормированных величин. При наличии более высоких препятствий одновременно с переводом РУД во взлетное положение отклоняют поворотные сопла турбовентиляторных двигателей 3 в сторону взлетной площадки на заданный угол с целью создания вертикальной составляющей тяги, дополняющей тягу несущего винта для реализации более крутой траектории движения вертоплана на взлете, сопоставимой с траекторией движения вертолета.
В горизонтальном полете с ростом скорости подъемная сила крыла 2 увеличивается, разгружая несущий винт. На заданной скорости осуществляют уменьшение частоты вращения несущего винта 1 вплоть до его полной остановки. Для этого устанавливают такой общий шаг несущего винта, при котором углы притекания воздушного потока к сечениям наступающих лопастей и проекции их аэродинамических сил на направление движения минимальны.
При достижении несущим винтом 1 минимальной частоты вращения и заданного азимутального положения его лопастей включают тормоз несущего винта для его окончательного торможения и фиксации. Данный тормоз используется также для остановки вращения несущего винта и его фиксации на стоянке после завершения полета. Известные конструкции таких тормозов и системы их управлением для остановки вращения несущего винта и его фиксации на стоянке после завершения полета нашли применение, например, на серийно выпускаемых вертолетах.
В результате данного преобразования две лопасти трехлопастного несущего винта 1, расположенные впереди его оси вращения симметрично относительно продольной оси фюзеляжа, становятся консолями крыла стреловидного типа. Третья лопасть несущего винта располагается сзади оси его вращения над фюзеляжем. После этого общим шагом устанавливают заданные значениями углов установки лопастей для минимизации создаваемой ими подъемной силы и их аэродинамического сопротивления на больших скоростях полета.
Известно, что аэродинамическое профильное сопротивление крыла состоит из сопротивления трения и формы (давления) [5]. Отличительная особенность стреловидного крыла вертоплана заключается в том, что левая лопасть остановленного несущего винта обтекается потока воздуха спереди, а правая лопасть - сзади.
На скоростях воздушного потока воздуха с числом Маха не более 0,7 сопротивление трения профилей лопастей - консолей крыла будет одинаковым. Сопротивление форы профилей левой лопасти из-за различного направления набегающего потока воздуха окажется несколько отличным от сопротивления формы профилей правой лопасти. Однако сопротивление формы профилей с небольшой относительной толщиной существенно меньше сопротивления трения этих профилей.
Следовательно, аэродинамическое профильное сопротивление левой и правой лопасти остановленного несущего винта в полете будет практически одинаковым. Именно это позволяет отказаться от сложного способа поворота правой лопасти на 180° в процессе торможения несущего винта для достижения ее полной идентичности с левой лопастью по отношению к набегающему потоку воздуха.
Все это в совокупности позволяет реализовать на вертоплане более высокие значения крейсерской скорости, аэродинамического качества и дальности полета по сравнению с вертолетом, винтокрылом и известным винтокрылым летательным аппаратом [1].
Перед заходом вертоплана на посадку в горизонтальном полете на заданной скорости тормоз несущего винта выключают, устанавливают необходимый общий шаг для осуществления раскрутки несущего винта набегающим потоком воздуха до требуемой частоты вращения. С целью ускоренной раскрутки несущего винта, в случае необходимости, используют систему его раскрутки на старте перед взлетом.
Для выполнения посадки вертоплана без пробега на глиссаде планирования устанавливают заданную скорость, заданную величину общего шага авторотирующего несущего винта 1 с целью обеспечения максимально возможной частоты его вращения и необходимого запаса кинетической энергии. Затем на заданной высоте относительно поверхности посадочной площадки включают реверсивные устройства турбовентиляторных двигателей 3 для торможения аппарата и уменьшения посадочной скорости. После этого перед окончанием торможения увеличивают общий шаг и тягу несущего винта 1 для уменьшения скорости приземления аппарата вплоть до нулевого значения к моменту касания колес шасси поверхности площадки.
Все рекомендации по реализации данного способа посадки [6] приемлемы на вертоплане в полном объеме. В случае необходимости выполнения посадки на площадку ограниченных размеров, после окончания торможения аппарата и выключения реверсивных устройств турбовентиляторных двигателей 3 отклоняют поворотные сопла двигателей в сторону поверхности площадки на заданный угол для создания вертикальной составляющей тяги в дополнение к тяге несущего винта 1. Это позволяет осуществить кратковременное зависание вертоплана перед приземлением подобно вертолету.
Проведенный заявителем анализ уровня техники показал, что совокупность существенных признаков заявленного технического решения является новой и промышленно приемлемой для достижения указанного технического результата и соответствует условию патентоспособности изобретения.
Источники информации
1. Патент RU 130951 U1, МПК В64С 27/22, опубл. 10.08.2013 г.
2. Миль М.Л., Некрасов А.В. и др. Вертолеты. Расчет и проектирование. Аэродинамика. Издательство «Машиностроение», Москва, 1966 г. (стр. 26).
3. Максимов Η.Α., Секистов Β.Α. «Двигатели самолетов и вертолетов», военное издательство министерства обороны СССР, Москва, 1977 г. (стр. 197-202).
4. Патент RU 2514012 C1, МПК В64С 27/02, опубл. 25.02.2014 г.
5. Свищев Г.П. Авиация, энциклопедия. Научное издательство «Большая Российская энциклопедия», ЦАГИ, Москва, 1994 г. (стр. 527, 528).
6. Патент RU 2506203 C1, МПК В64С 27/02, опубл. 10.02.2014 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2662339C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2652868C1 |
| ВИНТОКРЫЛ | 2017 |
|
RU2673754C2 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2618832C1 |
| СКОРОСТНОЙ ТУРБОВЕНТИЛЯТОРНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629475C1 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| СПОСОБ ВЗЛЕТА БЕЗ РАЗБЕГА ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АВТОРОТИРУЮЩИМ НЕСУЩИМ ВИНТОМ И КРЫЛОМ | 2013 |
|
RU2514012C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
Изобретения относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Винтокрылый летательный аппарат содержит несущий винт, крыло, фюзеляж, хвостовое оперение самолетного типа, самолетно-вертолетную систему управления. Авторотирующий несущий винт с жестким креплением лопастей выполнен преобразуемым в крыло. Двигатели турбовентиляторного типа выполнены с реверсивно-девиаторными устройствами. Достигается улучшение взлетно-посадочных характеристик винтокрылого летательного аппарата. 2 ил.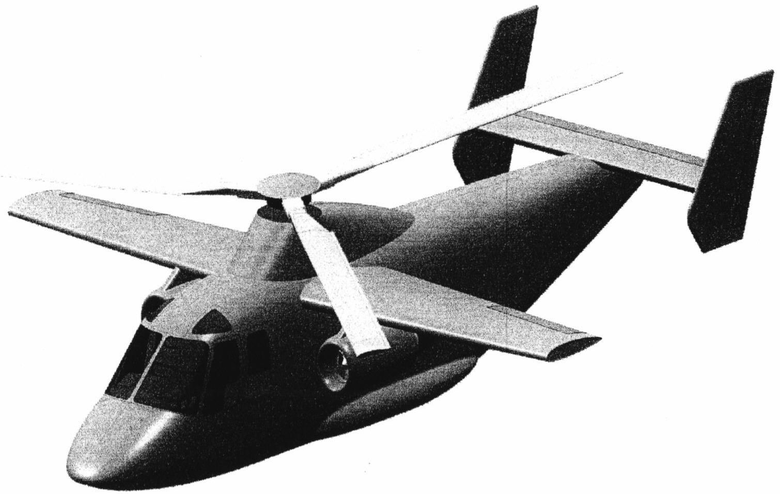
Винтокрылый летательный аппарат, содержащий несущий винт, крыло, фюзеляж, хвостовое оперение самолетного типа, самолетно-вертолетную систему управления, отличающийся тем, что авторотирующий несущий винт с жестким креплением лопастей выполнен преобразуемым в крыло, двигатели турбовентиляторного типа выполнены с реверсивно-девиаторными устройствами.
| US 6471158 B1, 29.10.2002 | |||
| US 2010243821 A1, 30.09.2010 | |||
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| US 2004056144 A1, 25.03.2004.. | |||

