Изобретение относится к контрольно-измерительным устройствам для проверки состояния железнодорожных путей и может быть использовано при мультисенсорном исследовании рельсового пути.
Под дефектами в данном случае будем понимать трещины, расслоения и другие, как правило, внутренние повреждения рельсов, обнаруживаемые ультразвуковыми, магнитными и другими приборами дефектоскопии. Под неровностями рельса будем понимать, как правило, внешние повреждения рельсового пути, выраженные в виде сколов головки, следов пробуксовок, искривления, статические и динамические изменения геометрии рельсов и т.п.Такие изменения обнаруживаются механическими, лазерными измерительными устройствами; акселерометрами и датчиками линейных перемещений, способными оценить поведение транспортного средства на рельсовом пути и (или) визуально.
Известны способы диагностики рельса [1], [2], [3], [4], [5], заключающиеся в измерении неровностей рельса акселерометрами ускорений транспортных средств (вагонов) при перемещении по рельсу, связанными с неровностями поверхности рельса и (или) геометрии рельса, и оценке его состояния на основе указанных измерений.
Известен более сложный способ диагностики рельса [6], заключающийся в различных вариантах совместного использования ультразвуковых и вихретоковых приборов, акселерометров, а также системы навигации.
Недостатком данного способа является несогласованность работы измерителей.
Наиболее близким к заявляемому является способ диагностики рельса [7], заключающийся в том, что на транспортное средство в известных относительных положениях устанавливают устройства: дефектоскопии, измерения неровностей рельса и видеонаблюдения, перемещают транспортное средство вдоль рельса, измеряют скорость его перемещения и текущее положение относительно рельса, постоянно измеряют всеми устройствами состояние рельса, для чего устройствами дефектоскопии и измерения неровностей рельса обнаруживают сигналы, свидетельствующие о подозрениях на дефекты и неровности, соответственно, анализируют указанные сигналы и принимают решение о степени опасности соответствующих участков рельса, вычисляют координаты этих участков по длине рельса.
Недостатком этого и всех предшествующих способов является то, что разнообразные измерительные приборы, установленные на транспортном средстве, рассматриваются по отдельности. Однако результаты измерений обладают единством по расположению, взаимовлиянию, скорости перемещения и объектам исследования. Учет этого единства при установке, организации измерений и анализе результатов позволит не только повысить качество диагностики рельсового пути, но и произвести прогноз состояния рельса. Кроме того, в способе [7] для дефектоскопии используются только средства измерения износа головок рельсов, что не достаточно для достоверной диагностики состояния рельсового пути.
Железные дороги являются сложными инженерно-техническими объектами с повышенной ответственностью за безопасность перевозок. Основным объектом контроля являются рельсы - на предмет наличия внутренних дефектов (трещин, расслоений, повреждений головок и т.п.), а также внешних свойств рельсов в виде изменения геометрии рельсового пути, локальных дефектов поверхности катания, сколов и т.п.
Для контроля рельсов используются ультразвуковые, магнитные, оптические, механические и другие методы неразрушающего контроля и соответствующие приборы. Каждый из измерительных приборов содержит средства измерения, обработки, хранения и отображения результатов и, как правило, используются независимо друг от друга. Контроль состояния рельсовых путей не должен существенно влиять на перевозки, что приводит к необходимости создания высокоскоростных, универсальных измерительных средств, осуществляющих всесторонний контроль состояния рельсов. Автоматические средства диагностики, как правило, не обеспечивают требуемый уровень достоверности, в результате чего возникают высокие вероятности «ложных тревог» и (или) пропуска дефекта. На сегодняшний день наибольшую достоверность обеспечивают автоматизированные способы, основанные на взаимодействии измерительных устройств с оператором. При этом возможны два способа оценки полученных результатов:
- Оперативный - позволяющий быстро обнаружить дефекты в процессе измерений и адекватно реагировать на критическое состояние рельсового пути.
- Лабораторный - предполагающий сохранение результатов измерений
рельсового пути и их последующую обработку.
Объединение множества измерительной аппаратуры в вагоне-дефектоскопе позволяет производить диагностику рельсового пути быстрее и дешевле. Периодичность измерения приборами должна выбираться из скорости движения транспортного средства для достижения требуемой разрешающей способности. Оперативный контроль состояния рельсового пути при наличии большого количества разнородной измерительной аппаратуры требует нескольких операторов. Обычно расшифровку результатов приходится проводить после окончания измерений.
Очевидно, что измерение состояния рельса на одном и том же участке различными средствами нельзя считать независимыми. Средства дефектоскопии показывают на наличие внутренних повреждений рельсов, а устройства определения неровностей рельса позволяют выявить места, в которых уже возникли статические деформации, а также участки, наиболее подверженные динамическим нагрузкам от проходящих рельсовых транспортных средств, способствующие развитию внутренних дефектов. Наконец, система видеонаблюдения позволяет визуально оценить состояние рельса на участке.
Задачей, решаемой заявляемым способом, является обеспечение диагностики рельсов с совместным использованием устройств дефектоскопии, измерения неровностей и видеонаблюдения с целью более достоверной оценки их состояния и перспектив развития опасных участков.
Для решения поставленной задачи в способ диагностики рельса, заключающемся в том, что на транспортное средство в известных относительных положениях устанавливают устройства: дефектоскопии, измерения неровностей и видеонаблюдения рельсов, перемещают транспортное средство вдоль рельсов, измеряют скорость его перемещения и текущее положение относительно рельсов, постоянно измеряют всеми устройствами состояние рельсов, для чего устройствами дефектоскопии и измерения неровностей рельсов обнаруживают сигналы, свидетельствующие о подозрениях на дефекты и неровности, соответственно, анализируют указанные сигналы и принимают решение о степени опасности соответствующих участков рельсов, вычисляют координаты этих участков по длине рельсов, периоды измерений состояния рельсов всеми указанными устройствами выбирают, исходя из скорости перемещения транспортного средства и требуемой разрешающей способности поиска, повышают чувствительность обнаружения сигналов, свидетельствующих о подозрениях на дефекты и неровности, задерживают мгновенные сигналы измерений всех указанных устройств с учетом их относительного положения и скорости перемещения транспортного средства так, чтобы они относились к одним и тем же поперечным сечениям рельсов, и сохраняют полученные результаты, совместно анализируют сигналы всех устройств на участках рельсов с подозрениями на дефект или неровности, оценивают перспективное состояние участков рельсов.
Существенными отличиями заявляемого способа по сравнению с прототипом являются следующие действия.
Периоды измерений состояния рельсов всеми указанными устройствами выбирают, исходя из скорости перемещения транспортного средства и требуемой разрешающей способности поиска, что позволяет сократить количество измерений и объем сохраняемой информации при малых скоростях перемещения транспортного средства без ухудшения качества работ.
В прототипе вопрос о периодичности измерений не рассматривается.
Повышение чувствительности обнаружения сигналов, свидетельствующих о подозрениях на дефекты и неровности, позволяет обратить внимание на дефекты и неровности, которые при раздельных измерениях считались бы «вариантом нормы», а при совместном анализе сигналов от всех устройств могут свидетельствовать о перспективе опасного развития событий.
В прототипе используют такую чувствительность, при которой каждое устройство может обнаружить соответствующий дефект или неровность по собственным критериям.
Задерживают мгновенные сигналы измерений всех указанных устройств с учетом их относительного положения и скорости перемещения транспортного средства так, чтобы они относились к одним и тем же поперечным сечениям рельсов. В результате указанной задержки результаты измерений всеми устройствами совмещаются пространственно по отношению к рельсу.
В прототипе результаты измерений принимают и сохраняют по отдельности.
Совместный анализ сигналов всех устройств на участках рельсов с подозрениями на дефект или неровности позволяет обнаружить участки рельса, на которых присутствуют внутренние дефекты и внешние неровности рельса, несущественные по отдельности, но вместе способные привести к опасным последствиям. Оценка перспективного состояния участков рельсов позволяет спрогнозировать развитие событий на участках рельсов.
В прототипе оценивается только текущее состояние рельса.
Заявляемый способ иллюстрируют следующие графические материалы.
Фиг.1 - Общий вид вагона-дефектоскопа, где:
1. Вагон-дефектоскоп.
2. Рельсы.
3. Ходовая тележка.
4. Акселерометры.
5. Ультразвуковой дефектоскоп.
6. Датчики ультразвукового дефектоскопа.
7. Одометр.
8. Навигационная система GPS.
9. Видеокамеры.
10. Сервер.
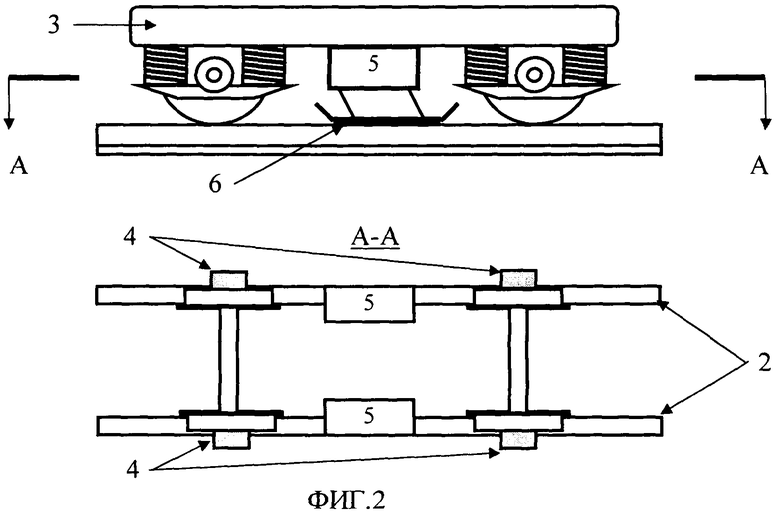
Фиг.2 - Ходовая тележка.
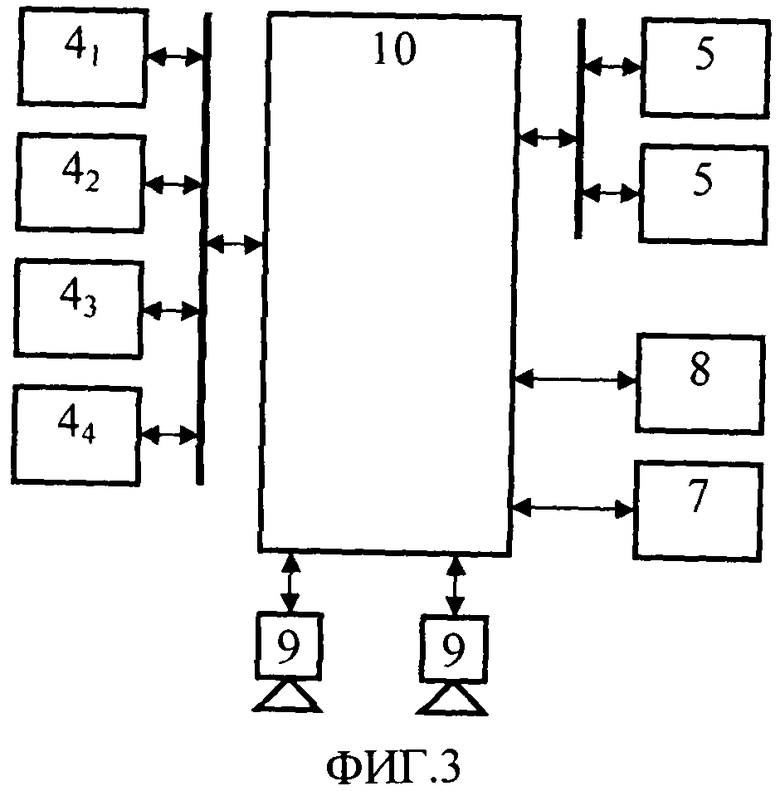
Фиг.3 - Структурная схема устройства.
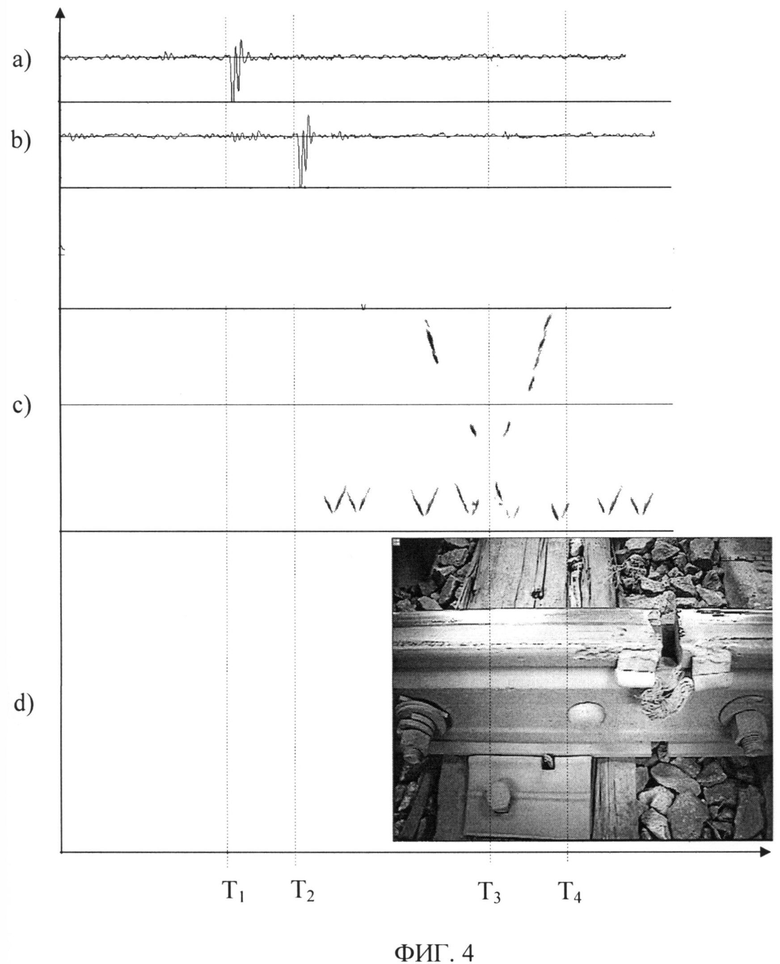
Фиг.4 - Временные диаграммы при раздельном поиске дефектов.
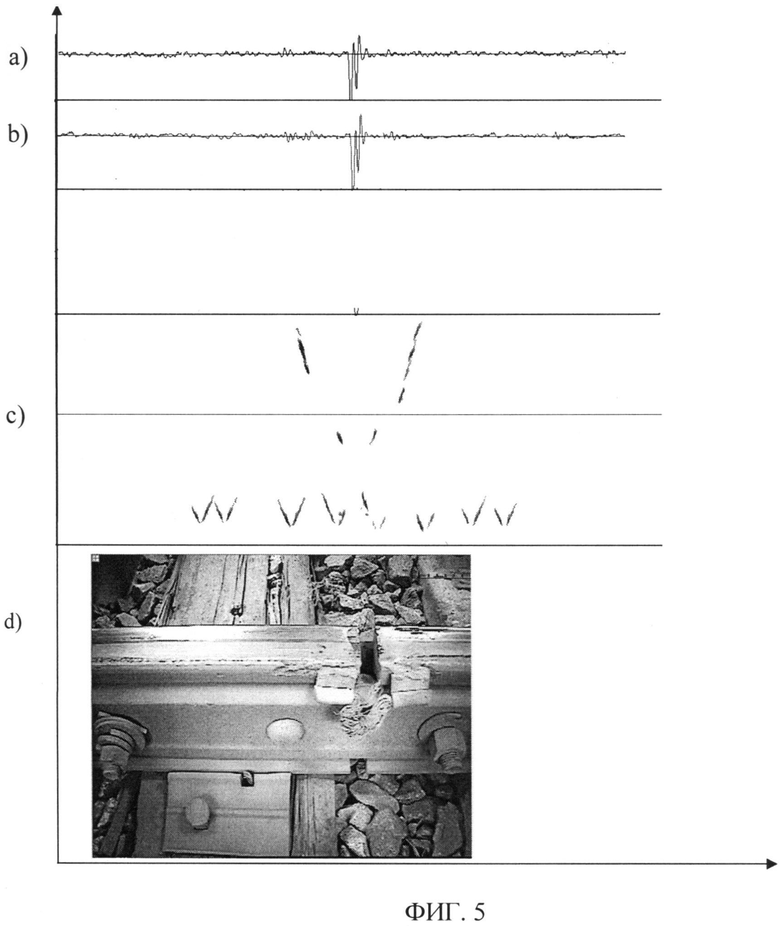
Фиг.5 - Временные диаграммы при совмещенном поиске дефектов,
где:
a) сигналы акселерометра 41;
b) сигналы акселерометра 42;
c) сигналы УЗ дефектоскопа;
d) видеоизображение участка пути.
Рассмотрим простейший вариант реализации заявляемого способа. На транспортное средство вагон-дефектоскоп, фиг.1, 2, на известных относительных расстояниях устанавливают двухниточные устройства дефектоскопии, измерения неровностей и видеонаблюдения рельсов навигации, способные измерять (наблюдать) состояние обоих ниток рельсового пути. Места установки устройств выбирают, исходя из удобства размещения, конструктивных и других соображений. Все указанные устройства являются автономными, т.е. способны принимать и сохранять информацию, а устройства дефектоскопии и измерения неровностей и анализировать ее. При анализе сигналов в каждом из устройств обычно устанавливаются пороги обнаружения, т.е. такие уровни измеренного сигнала, при которых состояние рельса следует считать подозрительным или неудовлетворительным. Система навигации обеспечивает определение местоположения вагона дефектоскопа и скорость его перемещения. Все описанные устройства и система навигации соединены с сервером 10, фиг.3, который обеспечивает синхронизацию, объединение и отображение всей информации.
В качестве устройств дефектоскопии используются ультразвуковые дефектоскопы 5 с лыжей 6, на которой установлены электроакустические преобразователи [8]. Ультразвуковые дефектоскопы 5, как правило, выполняются в виде подвесных устройств, расположенных между колесными парами вагона-дефектоскопа. Эти устройства способны обнаруживать дефекты рельсового пути.
Устройства измерения неровностей рельса реализованы в виде четырех двухкоординатных акселерометров 41-44, расположенных на концах осей ходовой тележки 3. Каждый акселерометр измеряет ускорения, возникающие в вертикальной плоскости - на местах пробуксовки, стыках и т.п., а также курсовые ускорения (рыскание), возникающие из-за нарушения геометрии пути, сколов головки рельса и т.п. Таким образом, указанные акселерометры реагируют на локальные неровности рельсового пути.
Для определения текущих координат и скорости перемещения вагона-дефектоскопа, как правило, используются несколько устройств. Приборы глобальной системы навигации GPS 8 обеспечивают грубое позиционирование вагона-дефектоскопа. Сигналы от ультразвукового дефектоскопа позволяют обнаружить характерные участки рельса (стыки, стрелки и т.п.) и привязать систему навигации к точкам конкретного рельсового пути. Одометр 7, работающий «от колеса», обеспечивает точную привязку измерителей при перемещениях по длине рельса между характерными точками.
Для видеонаблюдения используются скоростные видеокамеры 9.
Структурная схема системы, реализующей заявляемый способ, приведена на фиг.3.
Навигационная система при помощи навигатора 8 определяет ориентировочное (с точностью до метров) положение и скорость перемещения вагона-дефектоскопа 1 относительно рельсового пути 2 и передает эту информацию на сервер 10. При этом в сервере 10, как правило, хранится «легенда» рельсового пути, полученная в предшествующих измерениях и содержащая информацию о характерных точках рельсов. При движении по рельсам устройство ультразвуковой дефектоскопии 5 обнаруживает такие точки, а сервер 10 корректирует текущее положение вагона дефектоскопа 1. Между характерными точками счисление пути и измерение скорости осуществляется одометром 7. Таким образом, в каждый момент времени с достаточной точностью становятся известными текущее положение и скорость перемещения вагона-дефектоскопа.
Знание скорости перемещения позволяет серверу 10 выполнять синхронизацию по времени подключенных устройств, задавая периоды дефектоскопии, измерений неровностей рельсов и съемки видеокамер, исходя из требований по разрешающей способности диагностики рельсов.
Для устройств дефектоскопии и измерений неровностей рельсов устанавливают сниженные пороги обнаружения, в результате чего количество обнаруженных подозрительных или дефектных участков возрастает.
Пространственная разнесенность по длине рельса 2 акселерометров 41 и 42, ультразвуковых преобразователей на лыже 6 и видеокамеры 9, фиг.1-2 приведет к тому, что, фиг.4, соответствующие сигналы а), b), с) и d) от них, относящиеся к одному и тому же поперечному сечению рельса, поступят в разные моменты времени T1-4. Для совместного анализа результаты измерений задерживают (сохраняют) в каждом из устройств. При обнаружении подозрительного участка рельса устройствами дефектоскопии 5 и (или) измерения неровностей 4 они сообщают об этом серверу 10. Зная скорость перемещения вагона-дефектоскопа 1 и расстояние между устройствами 41, 42, 6 и 9, в сервере 10 несложно рассчитать моменты времени T1-4. После прохождения этого участка видеокамерой 9 сервер 10 запрашивает и получает из соответствующих устройств информацию а), b), с) и d), относящуюся к одному и тому же поперечному сечению рельса, фиг.5. Такой способ позволяет совместно проанализировать полученную информацию. На фиг.5 видно, что источником сигналов на акселерометрах и УЗ дефектоскопах послужил рельсовый стык и опасности нет. А в других случаях наличие относительно небольших неровностей рельса в виде пробуксовки и незначительных трещин в головке рельса при рассмотрении по отдельности не является признаком опасности, а при совместном рассмотрении такой участок рельса может считаться подверженным дальнейшим разрушениям. Внешний осмотр этого участка рельса с использованием данных видеокамеры позволяет подтвердить или опровергнуть результаты приборных измерений. Например, нередко причиной обнаружения опасных участков техническими средствами является наличие посторонних предметов на или около рельсов. Таким образом, заявляемый способ диагностики рельса позволяет более достоверно оценивать не только текущее, но и перспективное состояние участков рельсов.
Источники информации
1. Патент GB 2443646.
2. Патент JP 2008100669.
3. Патент RU 65501.
4. Патент WO 2007007122.
5. Патент СН 1719208.
6. Патент AU 2008271145.
7. Патент RU 2066645.
8. Марков А.А. Шпагин Д.А. Ультразвуковая дефектоскопия рельсов. "Образование - Культура", 1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ комплексной диагностики рельсов | 2017 |
|
RU2642687C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2010 |
|
RU2446971C2 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ И СИНХРОНИЗАЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ | 2018 |
|
RU2680927C1 |
| МОБИЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2009 |
|
RU2438903C2 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2015 |
|
RU2586090C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| Способ магнитного обнаружения регулярных объектов рельсов | 2017 |
|
RU2671368C1 |
| СПОСОБ КОНТРОЛЯ ПРОДОЛЬНО-НАПРЯЖЕННОГО СОСТОЯНИЯ РЕЛЬСОВЫХ ПЛЕТЕЙ БЕССТЫКОВОГО ПУТИ | 2014 |
|
RU2555070C1 |
Изобретение относится к контрольно-измерительным устройствам для проверки состояния железнодорожных путей. Способ диагностики рельсов заключается в том, что на транспортное средство в известных относительных положениях устанавливают устройства: дефектоскопии, измерения неровностей и видеонаблюдения рельсов, перемещают транспортное средство вдоль рельсов, измеряют скорость его перемещения и текущее положение относительно рельсов, постоянно измеряют всеми устройствами состояние рельсов. Совмещают полученные результаты измерений так, чтобы они относились к одним и тем же поперечным сечениям рельсов и совместно анализируют. Оценивают текущее и перспективное состояние участков рельсов. В результате повышается достоверность оценки состояния рельсов и перспектив развития опасных участков. 5 ил.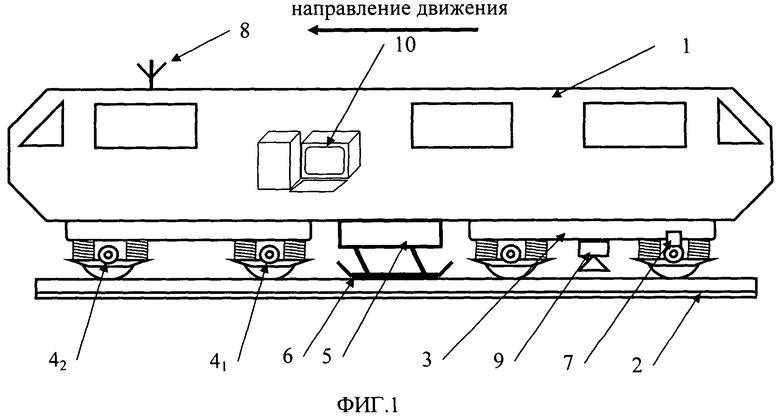
Способ диагностики рельсов, заключающийся в том, что на транспортное средство в известных относительных положениях устанавливают устройства: дефектоскопии, измерения неровностей и видеонаблюдения рельсов, перемещают транспортное средство вдоль рельсов, измеряют скорость его перемещения и текущее положение относительно рельсов, постоянно измеряют всеми устройствами состояние рельсов, для чего устройствами дефектоскопии и измерения неровностей рельсов обнаруживают сигналы, свидетельствующие о подозрениях на дефекты и неровности, соответственно, анализируют указанные сигналы и принимают решение о степени опасности соответствующих участков рельсов, вычисляют координаты этих участков по длине рельсов, отличающийся тем, что периоды измерений состояния рельсов всеми указанными устройствами выбирают, исходя из скорости перемещения транспортного средства и требуемой разрешающей способности поиска, повышают чувствительность обнаружения сигналов, свидетельствующих о подозрениях на дефекты и неровности, задерживают мгновенные сигналы измерений всех указанных устройств с учетом их относительного положения и скорости перемещения транспортного средства так, чтобы они относились к одним и тем же поперечным сечениям рельсов и сохраняют полученные результаты, совместно анализируют сигналы всех устройств на участках рельсов с подозрениями на дефект или неровности, оценивают перспективное состояние участков рельсов.
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| Покрытые электроды для наплавки режущего инструмента | 1948 |
|
SU81210A1 |
| Репродукционная приставка к фотоаппаратам | 1950 |
|
SU91321A1 |
| US 20100004804 A1, 07.01.2010. | |||

