Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры.
Изобретение относится к способам и средствам диагностики железнодорожной инфраструктуры с применением автоматизированных средств оценки состояния технических объектов, связанных с обеспечением безопасности движения поездов.
Основными областями применения МАРК является железнодорожная инспекция и рельсовая дефектоскопия; сопровождение поездов и воинских эшелонов для обеспечения безопасности движения; ведение технической разведки в зонах чрезвычайных ситуаций, природных и техногенных катастроф; ведение технической разведки железнодорожных войск, включая поиск и уничтожение взрывных устройств; ведение радиохимической разведки и непрерывное наблюдение на объектах железнодорожной инфраструктуры в очагах применения оружия массового поражения; патрульная служба и охрана критически важных и потенциально опасных объектов.
Известны мобильные устройства для проведения железнодорожной разведки, путеизмерения и рельсовой дефектоскопии, которые различаются как конструктивно, так и средствами и способами измерения параметров железнодорожной инфраструктуры. Однако, среди них не существует полностью автономных роботизированных комплексов.
Известен способ обнаружения препятствий для железнодорожных транспортных средств вблизи пути при помощи беспилотного транспортного средства безопасности (далее – устройства), которое обнаруживает препятствия перед железнодорожным транспортным средством и передает результаты на транспортное средство или в оперативный центр. /Заявка на получение патента DE19826771 (A1), опубл. 1999-12-16/.
Синхронно перемещаясь на безопасном расстоянии перед поездом, устройство ведёт непрерывную визуальную запись системой камер, непрерывно снимая сигналы от путевой системы на рельсовом транспортном средстве и / или сигналы, посылаемые станцией. Для обнаружения препятствий устройство использует визуальные и / или основанные на электромагнитном излучении датчики и измерительные приборы. Устройство находится в постоянном контакте с оператором поезда через систему связи, состоящей из одного технического радиоканала и через систему камер оптического контроля выводит информацию на экран в кабине оператора железнодорожного транспортного средства. К устройству также может быть прикреплено оборудование, с помощью которого можно устранить небольшие препятствия на путях. Устройство предназначено для использования на высокоскоростных поездах. Недостатками такого устройства является его постоянная привязка к оператору (машинисту) поезда, малая функциональность, оснащённость и энерговооружённость, а также малый радиус действия. Устройство не является автономным и не способно обслуживаться и удаляться с путей без помощи персонала.
Также известен первый сертифицированный мобильный робот - профилометр для автоматической проверки железнодорожных стрелочных переводов и переездов «Felix», разработанный компанией Loccioni (Италия) для повышения надежности стрелочных переводов, гарантии безопасности железных дорог и решения проблем планирования инспекций и технического обслуживания.
/https://www.youtube.com/watch?time_continue=6&v=gfWQJLJ7NTc/. «Felix» представляет собой лёгкую разборную платформу с установленным инструментальным модулем и защитными бамперами, оснащен профилометрами и аппаратно-программным комплексом, способным предоставлять отчеты о проверке, создавать трехмерные образы проверяемых деталей и выполнять соответствующий анализ данных. Управление роботом осуществляется с помощью пульта оператора или планшета. «Felix» может контролировать основные геометрические параметры железнодорожного рельса, такие как: ширина колеи, наклоны, изгибы, зазоры и критические расстояния, свободные проходы колёс и пройденное расстояние, боковой и вертикальный износ рельса.
Одним из железнодорожных мобильных роботов является и устройство «IRiS», разработанное Лабораторией прикладной физики Университета Джона Хопкинса (США) – APL (Applied Physics Laboratory) The Johns Hopkins University. /https://www.jhuapl.edu/PressRelease/160727/ «IRiS» (Remote Rail Security and Inspection System) представляет собой дистанционно управляемое транспортное средство, предназначенное для предоставления разведывательной информации при возникновении железнодорожных происшествий. Платформа «IRiS» оснащена дальномерами и инфракрасными камерами и системой контрольно-измерительных приборов для проверки рельсов. В устройстве также может быть установлен ряд датчиков, которые включают в себя обнаружение химикатов или радиации. Операторы могут управлять «IRiS» дистанционно с одной портативной станции, что позволяет им одновременно маневрировать транспортным средством и просматривать телеметрию с камер и датчиков. «IRiS» может быть вручную установлен и снят с участка пути в течение нескольких минут, что значительно снижает воздействие на регулярные железнодорожные перевозки.
«Felix», «IRiS» и другие подобные устройства дистанционного управления, созданы для ограниченных по времени локальных задач и небольших расстояний, требуют постоянного участия операторов для их установки и управления. Ограниченные возможности этих аппаратов не позволяют им решать задачи полноценной диагностики инфраструктуры, автономной железнодорожной разведки или работы в очагах природных и техногенных катастроф.
Известен мобильный диагностический комплекс автоматизированной оценки состояния объектов железнодорожной инфраструктуры /RU2438903, B61K9/08, опубл. 10.01.2012г./, содержащий бортовой контрольно-вычислительный комплекс и комплекс контрольно-измерительных систем, снабженный системой контроля и оценки геометрических параметров пути, системой бесконтактного высокоскоростного контроля геометрических параметров рельсов, системой высокоскоростной дефектоскопии рельсов, системой скоростного визуального обнаружения дефектов пути, системой контроля динамики движения поезда, системой скоростного георадиолокационного контроля, системой скоростного контроля габаритов приближения строений, системой скоростного контроля состояния систем железнодорожной автоматики и телемеханики, системой скоростного контроля состояния контактной сети, системой контроля параметров аналоговой радиосвязи, системой контроля параметров цифровой радиосвязи. Комплекс предназначен для диагностики, анализа и прогнозирования состояния таких объектов пути, как рельсы, шпалы, контактные провода, мосты, туннели и др. Техническое устройство отражает состояние геометрии рельсового пути, износа рельсов, контроль дефектов рельсов, условия эксплуатации - скорости передвижения поездов и других рельсовых транспортных средств, динамические нагрузки, нагрузки на оси колес и т.д., а также характеристики дорожных схем, расположение поворотов, кривых и прямых участков рельсового пути, местонахождение откосов и пр. Данный мобильный диагностический комплекс (МДК) наиболее полно отражает задачи комплексной диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры и имеет ряд преимуществ, таких как наличие системы скоростного контроля состояния контактной сети, контроля состояния систем железнодорожной автоматики и телемеханики, систем контроля параметров аналоговой и цифровой радиосвязи, а также различных систем оценки некоторых параметров безопасности в условиях реальной нагрузки на рельсы. В отличие от дефектоскопических автомотрис, МДК способен работать длительное время, имея в своём составе вагоны для персонала, т.е. обладает достаточной автономностью. Аппаратура, установленная на МДК, рассчитана на работу при скоростях движения до 250 км/час (величина измеряемой скорости движения комплекса может достигать 300 км/час).
По совокупности отдельных характеристик, включая многофункциональность и автономность работы, но в большей степени идеологически, МДК наиболее близок к МАРК и может считаться его прототипом.
Основными недостатками МДК является высокая стоимость оборудования, работы и обслуживания, а также сложность выбора окон контроля в условиях плотного трафика. МДК является полноценным железнодорожным составом, состоящим из дефектоскопического вагона, нескольких вагонов для персонала и локомотива. Соответственно, график движения МДК должен быть точно вписан в график движения поездов (ГДП). Для пропуска поездов по участку контроля МДК нуждается в железнодорожных узлах или раздельных пунктах. Следствием этого являются возможные задержки и простои, сложность остановки для дополнительной проверки проблемного участка трассы и т.д. МДК способен обнаружить и зафиксировать отдельный дефект на высокой скорости, но возвращение и более точная оценка дефекта потребует больших затрат времени и технических ресурсов. Для этого применяют менее сложные автомотрисы или дефектоскопные диагностические тележки, таким образом, разделяя процессы обнаружения и подробной оценки дефекта. Увеличение скорости работы МДК до 250 км/час оправдано его высокой стоимостью и увеличением установленных скоростей обращения поездов на участках пути, подлежащих контролю, однако, чем выше скорость контроля, тем ниже его качество. Поэтому для улучшения качества скоростного контроля применяется всё более сложное и дорогое дефектоскопическое оборудование. Также нужно учесть стоимость топлива, время и стоимость обслуживания дефектоскопических вагонов на участковых станциях и в локомотивном депо, высокую амортизацию оборудования, стоимость труда локомотивной бригады и операторов вагона – дефектоскопа (более 10 человек). Эксплуатация МДК требует соблюдения высоких требований безопасности движения из-за наличия на борту персонала и дорогостоящего оборудования. МДК сложно применять в зонах экологических бедствий и технологических катастроф (размывы и повреждения полотна, обвалы склонов и оползни на трассах, пожары и т.д.). МДК наиболее эффективно осуществляет «быстрый» комплексный контроль железнодорожной инфраструктуры на прогонах большой протяжённости и плотным ГДП с малыми интервалами движения поездов (порядка 4-х мин.) Такая форма контроля идеальна в период комиссионных проверок и полностью оправдывает высокую стоимость работы и оборудования МДК. Вместе с тем большое количество примыкающих и второстепенных трасс остаётся вне сферы применения МДК, т.к. значительно снижают эффективность его применения. Являясь мобильным комплексом, МДК также оставляет за пределами своих возможностей непрерывный контроль движения транспортных средств на участках контроля, включающий систему счёта осей, весовой контроль, диагностику ходовых частей железнодорожного подвижного состава и т.д. В целом, на сегодняшний день МДК является наиболее продвинутым мобильным средством периодической комплексной диагностики верхнего строения пути и железнодорожной инфраструктуры.
Ни одно из подобных и выше перечисленных мобильных устройств не в состоянии объединить функции диагностирования технических объектов, включая оценку технического состояния объекта, обнаружение и определение места локализации неисправностей, прогнозирование остаточного ресурса объекта и мониторинг состояния как непрерывный процесс сбора и анализа информации о значении диагностических параметров состояния объекта. Также на сегодня не существует устройств, способных эффективно и без риска для персонала осуществлять подобный мониторинг состояния объекта, а также вести железнодорожную разведку в условиях повышенной опасности.
Техническая проблема, решаемая заявляемым техническим решением, заключается в повышении безопасности и эффективности диагностики железнодорожной инфраструктуры путем создания участков непрерывного контроля с применением роботизированных устройств. Технический результат - высокая степень безопасности и высокая эффективность процесса диагностики железнодорожной инфраструктуры.
Поставленная техническая проблема решается созданием многофункционального автономного роботизированного комплекса диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры «МАРК» (далее – МАРК), соединяющего в себе функционал отдельных служб путевого контроля – постоянных, текущих, периодических и специальных осмотров и измерений.
Комплекс включает стационарную часть, состоящую из базовой станции и одной и более эвакуационных станций, и мобильные части, выполненные в виде подвижных единиц. При этом стационарная часть оснащена функциональным оборудованием, обеспечивающим автономную работу комплекса, управление подвижными единицами и связь с оператором единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте (ИСУЖТ).
Подвижные единицы представляют собой беспилотные съёмные рельсовые транспортные средства различного назначения.
Беспилотные съёмные рельсовые транспортные средства выполнены в виде монитора или платформы.
Подвижная единица выполнена с возможностью установки или удаления с путей посредством автоматизированных устройств (эвакуаторов), размещённых в стационарной части комплекса.
Подвижная единица оборудована гибридной дизель-электрической силовой установкой, обеспечивающей движение до уровня установленных скоростей обращения поездов на участках пути, подлежащих контролю.
Гибридная дизель-электрическая силовая установка оснащена блоком литий-титанатных аккумуляторных батарей, обеспечивающим силовой установке электрическую энергию с подзарядкой блока от дизель-генераторной установки.
Мониторы и платформы снабжены блоком управления, обеспечивающим их работу в автономном режиме или базовом режиме или через прямое управление оператором или через постановку задачи оператором МАРК или удалённым оператором интеллектуальной системе управления монитора или платформы.
Подвижная единица может быть оснащена по крайней мере одним из следующих систем или приборов: бортовым вычислительным и навигационно-связным комплексами, системой габаритного контроля приближения строений, системами визуального, магнитного и ультразвукового контроля рельсового пути, системой сплошного оптического контроля геометрических параметров рельсов и рельсовых пересечений, путеизмерительным и профилометрическим комплексами, системой георадиолокационного контроля балластного слоя и подбалластной зоны, средствами видеонаблюдения и радиолокации местности, комплексом приборов экологического мониторинга, комплексом бортовых манипуляторов, оснащённых видеокамерами, беспилотным летательным аппаратом, роботизированной установкой пожаротушения, грузовыми и специальными модулями различного назначения.
Стационарная часть комплекса связана с единой интеллектуальной системой управления и автоматизации производственных процессов на железнодорожном транспорте через удалённого оператора.
Базовая станция располагается в центре участка, подлежащего контролю, а эвакуационная станция может быть расположена на всём протяжении участка, подлежащего контролю.
Базовая и эвакуационные станции представляют собой блок-контейнеры, размещаемые в полосе отвода железной дороги и установленные на бетонированных площадках с заглублёнными ёмкостями для воды и топлива.
Базовая и эвакуационные станции могут быть оснащены по крайней мере одной из следующих систем или приборов: системами связи и управления комплексом и подвижными единицами, автоматизированными устройствами для их установки и съёма с рельсов, роботизированным сервисным комплексом, включающим мойку и спецобработку, зарядку аккумуляторов, заправку дизельным топливом, водой и техническими жидкостями подвижных единиц, а также контрольными постами, с системой счёта осей, весовая станция с бесплатформенными железнодорожными весами и многофункциональный комплекс технических средств для диагностики ходовых частей железнодорожного подвижного состава.
Предлагается также способ диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры. Заявленный способ предусматривает, что данные диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры с привязкой к единой координате пути передают оператору или базовому радиотехническому комплексу стационарной части, осуществляют их первичную обработку, формируют диагностическую карту участка рельсового пути, осуществляют последующую передачу данных оператору единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте и получают от него новые рабочие задания с возможностью их выполнения как в автоматическом режиме, так и в режиме удаленного управления.
При этом данные диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры получают посредством бесконтактного контроля рельсов; видеофиксацией элементов верхнего строения пути в пределах рельсошпальной решетки; регулярным обмером поперечного профиля объектов инфраструктуры; измерением геометрических параметров пути, измерением рельсового профиля, ответвлений и пересечений с применением блоков оптической триангуляции; определением георадиолокационного профиля балластного слоя и подбалластной зоны железнодорожного полотна, включая склоны насыпей и стены тоннелей; сбором, анализом и обработкой потоковых телеметрических данных окружающей местности и объектов инфраструктуры; локальной видеосъёмкой и сканированием отдельных объектов; автоматическим обнаружением и сопровождением движущихся объектов на фоне земной и водной поверхности; анализом экологических параметров на пути следования; весовым контролем, счётом осей и диагностикой ходовых частей железнодорожного подвижного состава.
Первичную обработку данных контрольно-измерительных систем осуществляют посредством бортового вычислительного комплекса подвижной единицы.
Осуществляют объединение и обработку данных контрольно-измерительных систем с привязкой данных к единой координате пути и географической координате посредством бортового вычислительного комплекса с последующей передачей данных контрольно-измерительных систем стационарному вычислительному комплексу базовой станции или оператору единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте.
Передачу данных контрольно-измерительных систем оператору осуществляют через подвижные средства спутниковой связи или конвенциональный бортовой радиомодем УКВ-диапазона подвижной технологической радиосети обмена данными, обеспечивающей функционирование автоматизированных систем управления железнодорожным транспортом.
Посредством стационарного вычислительного комплекса базовой станции осуществляют формирование диагностической карты участка рельсового пути и передачу её оператору единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте.
Передачу данных оператору осуществляют через стационарные средства спутниковой связи или базовый радиомодем по стационарной технологической радиосети обмена данными на железнодорожном транспорте.
При этом данные контрольно-измерительных систем обрабатывают средствами комплекса или оператором единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте.
Диагностика и контроль верхнего строения пути и элементов железнодорожной инфраструктуры включает бесконтактный контроль рельсов средствами совмещенной магнитной и ультразвуковой диагностики; видеофиксацию элементов верхнего строения пути в пределах рельсошпальной решетки с целью обнаружения поверхностных дефектов, таких как трещины на поверхности катания рельса, повреждение шпал, скреплений, стыков и сварных соединений и т.д.; регулярный обмер поперечного профиля объектов инфраструктуры (зданий, мостов, тоннелей, откосов, балластной призмы, контактной сети и т.д.) при помощи датчиков обмера поперечного профиля; измерение геометрических параметров пути, измерение рельсового профиля, ответвлений и пересечений с применением блоков оптической триангуляции; определение георадиолокационного профиля балластного слоя и подбалластной зоны железнодорожного полотна, включая склоны насыпей и стены тоннелей, с применением управляемых георадарных устройств;
сбор, анализ и обработка потоковых телеметрических данных окружающей местности и объектов инфраструктуры в режиме реального времени с применением гиростабилизированной оптико-электронной системы; локальную видеосъёмку и сканирование отдельных объектов при помощи бортовых манипуляторов и внешнего сканирующего блока, объединяющего устойчивую к действию радиации цветную видеокамеру высокого разрешения с источником дополнительного освещения и сканер со сканирующим датчиком белого света; автоматическое обнаружение и сопровождение движущихся объектов на фоне земной и водной поверхности средствами радиолокации; анализ экологических параметров на пути следования средствами дозиметрического, метеорологического и химического контроля (погодные условия, шум, вибрация, электромагнитное и ионизирующее излучения, смог, запылённость, наличие в воздухе летучих органических соединений, опасных примесей и радиоактивных веществ и т.д.); весовой контроль, счёт осей и диагностикой ходовых частей железнодорожного подвижного состава.
Первичную обработку данных диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры осуществляет бортовой вычислительный комплекс подвижной единицы.
Бортовой вычислительный комплекс объединяет и обрабатывает данные контрольно-измерительных систем с привязкой данных к единой координате пути и географической координате.
Бортовой вычислительный комплекс передаёт данные контрольно-измерительных систем стационарному вычислительному комплексу базовой станции или оператору единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте через подвижные средства спутниковой связи или конвенциональный бортовой радиомодем УКВ-диапазона подвижной технологической радиосети обмена данными, обеспечивающей функционирование автоматизированных систем управления железнодорожным транспортом.
Стационарный вычислительный комплекс базовой станции формирует диагностическую карту участка рельсового пути и передаёт её оператору единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте.
Стационарный вычислительный комплекс базовой станции осуществляет передачу данных через стационарные средства спутниковой связи или базовый радиомодем по стационарной технологической радиосети обмена данными на железнодорожном транспорте.
Данные контрольно-измерительных систем могут быть обработаны средствами комплекса или оператором единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте.
Стационарный вычислительный комплекс получает от оператора рабочие задания с возможностью их выполнения как в автономном режиме, так и в режиме удаленного управления комплексом.
Сущность заявляемого устройства иллюстрируют следующие графические материалы:
Фиг. 1 – структурная схема МАРК.
Фиг. 2 – внешнее устройство монитора (вид сбоку), где:
1 – внешний корпус монитора; 2 – бампер; 3 – прожектор светодиодный; 4, 7 – ВК; 8 – БВКМ; 9 – СУМО; 11 – ГРАД; 12 – внешняя интегрированная антенна - приёмник GPS - ГЛОНАСС; 13 – светодиодный маяк; 15 – силовой гидравлический блок питания; 16 – заправочная станция; 17 – автоматическая система пожаротушения; 18 – ПИК; 19 – ДСК; 20 – ПМК; 21 – входной канал вил эвакуатора; 22 – ОЗУ; 23 – СКВ; 24 – ВКП; 32 – капот КБМ; 63 – приборы радиационной разведки и контроля; 64 – ГПО; 67 – автоматический газосигнализатор; 71 – БДГП-У ; 72 – БДГ-Д; 73 – ПХРДД; 143 –стыковочный узел; 144 – соединительный узел ГМ; 145, 151 – ГМ; 146 – распределительный узел; 147 – насосная станция РУПС; 152 – пусковая для ракет СХТ.
Фиг. 3 – внешнее устройство монитора (вид сверху), где:
2 – бампер; 7 – ВК; 10 – воздухозаборный клапан МЭМ; 12 – внешняя интегрированная антенна - приёмник GPS - ГЛОНАСС; 13 – светодиодный маяк; 26 – ДПП; 27 – гидродемпфер бампера; 32 – капот КБМ; 33 – БПЛА; 34 – инфракрасная PTZ – видеокамера; 35 – РЛС; 36 – РУПС; 37 – ОК; 38 – КВН; 39 – заправочная панель монитора; 42 –тяговые аккумуляторы; 46 – силовая установка; 62 – АМК; 66 – топливный бак; 68 – зарядная панель монитора; 71 – БДГП-У; 72 – БДГ-Д; 73 – ПХРДД; 143 –стыковочный узел; 144 – соединительный узел ГМ; 149 – фиксирующие створки ЭМ; 152 – пусковая для ракет СХТ.
Фиг. 4 – внешнее устройство монитора (вид спереди), где:
2 – бампер; 3 – прожектор светодиодный; 4 – ВК; 5 – фронтальная тепловизионная камера; 6 – гиперспектральная камера; 25 – лазерный «рельсовый» дальномер (3м); 26 – ДПП; 27 – гидродемпфер бампера; 28 – лазерный «парковочный» дальномер (30м); 29 – лазерный «маршевый» дальномер (300м); 32 – капот КБМ; 34 – инфракрасная PTZ – видеокамера; 35 – РЛС; 36 – РУПС; 37 – ОК; 38 – КВН; 40 – управляемый блок прожекторов ОК; 41 – ЭМ; 43 – ГОЭС; 59 – ЭМ; 62 – АМК; 71 – БДГП-У; 72 – БДГ-Д; 73 – ПХРДД; 143 – стыковочный узел; 145 – ГМ; 152 – пусковая для ракет СХТ; 153 –заправочный клапан.
Фиг. 5 – внутренняя схема монитора (вид сбоку), где:
2 – бампер; 3 – прожектор светодиодный; 4 – ВК; 8 – БВКМ; 9 – СУМО; 10 – воздухозаборный клапан МЭМ; 11 – ГРАД; 14 – манипулятор; 15 – силовой гидравлический блок питания; 16 – заправочная станция; 17 – автоматическая система пожаротушения; 18 – ПИК; 20 – ПМК; 21 – входной канал вил эвакуатора; 22 – ОЗУ; 24 – ВКП; 25 – лазерный «рельсовый» дальномер (3м); 26 – ДПП; 27 – гидродемпфер бампера; 30 – выдвижные гермоконтейнеры КБМ; 32 – капот КБМ; 33 – БПЛА; 34 – инфракрасная PTZ – видеокамера; 35 – РЛС; 36 – РУПС; 37 – ОК; 39 – заправочная панель монитора; 40 – управляемый блок прожекторов ОК; 41 – ЭМ; 43 – ГОЭС; 44 – линейная ось манипулятора; 45 – ёмкость с дистиллированной водой; 46 – силовая установка; 47 – параллелограммный механизм; 48 – несущая рама ДСК; 49 – актуатор подъема и опускания искательной системы (транспортный/рабочий режимы работы ДСК); 50 – электромагнитные катушки; 51 – ультразвуковые искатели; 52 – постоянные магниты следящей системы; 53 – продольная центрирующая балка следящей системы; 54 – планка подвеса искателей; 55 – актуаторы установки высоты планки искателей; 56 – ёмкость с контактирующей жидкостью для УЗ – дефектоскопии; 57 – Π-образный сердечник электромагнитного контура ДСК; 58 – блок управления и кондиционирования СКВ; 59 – ЭМ; 60 – блок фильтров СКВ; 61 – вентилятор СКВ; 62 – АМК; 65 – привод подъёма ЭМ; 69 – станция РУПС КБМ; 70 – коннектор насосной станции КБМ; 72 – БДГ-Д; 73 – ПХРДД; 144 – соединительный узел ГМ; 149 – фиксирующие створки ЭМ; 153 – заправочный клапан; 154 – пневматическая пила; 155 – дополнительный коннектор КБМ; 159 – шланговый барабан насосной станции КБМ; 160 – внешний сканирующий блок КВН КБМ.
Фиг. 6 – внешнее устройство и внутренняя схема монитора (вид сверху), где:
2 – бампер; 7 – ВК; 8 – БВКМ; 9 – СУМО; 10 – воздухозаборный клапан МЭМ; 11 – ГРАД; 12 – внешняя интегрированная антенна - приёмник GPS - ГЛОНАСС; 13 – светодиодный маяк; 14 – манипулятор; 16 – заправочная станция; 17 – автоматическая система пожаротушения; 24 – ВКП; 26 – ДПП; 27 – гидродемпфер бампера; 30 – выдвижные гермоконтейнеры КБМ; 33 – БПЛА; 34 – инфракрасная PTZ – видеокамера; 35 – РЛС; 36 – РУПС; 37 – ОК; 38 – КВН; 39 – заправочная панель монитора; 40 – управляемый блок прожекторов ОК; 42 – тяговые аккумуляторы; 44 – линейная ось манипулятора; 45 – ёмкость с дистиллированной водой; 46 – силовая установка; 61 – вентилятор СКВ; 62 – АМК; 63 – приборы радиационной разведкии и контроля; 64 – ГПО; 66 – топливный бак; 67 – автоматический газоанализатор; 68 – зарядная панель монитора; 69 – распылитель станции РУПС КБМ; 70 – коннектор насосной станции КБМ; 71 – БДГП-У ; 72 – БДГ-Д; 73 – ПХРДД; 143 –стыковочный узел; 144 – соединительный узел ГМ; 149 – фиксирующие створки ЭМ; 152 – пусковая для ракет СХТ; 154 – пневматическая пила; 156 – цилиндрический пробоотборник; 158 – шланговый барабан распылителя станции РУПС КБМ; 159 – шланговый барабан насосной станции КБМ; 162 – кабельный мотор-барабан.
Фиг. 7 – внешнее устройство и внутренняя схема монитора (вид спереди), где:
2 – бампер; 14 – манипулятор; 26 – ДПП; 27 – гидродемпфер бампера; 30 – выдвижные гермоконтейнеры КБМ; 32 – капот КБМ; 44 – линейная ось манипулятора; 69 – распылитель станции РУПС КБМ; 70 – коннектор насосной станции КБМ; 135 – приёмный люк; 153 – заправочный клапан; 154 – пневматическая пила; 155 – дополнительные коннекторы КБМ; 156 – цилиндрический пробоотборник; 160 – внешний сканирующий блок КВН КБМ; 176 – кассета с пробоотборниками.
Фиг. 8 – внутренняя схема монитора и путеизмерительный комплекс «ПИК» (вид сзади), где:
13 – светодиодный маяк; 17 – автоматическая система пожаротушения; 18 – ПИК; 37 – ОК; 38 – КВН; 40 – управляемый блок прожекторов ОК; 41 – ЭМ; 43 – ГОЭС; 46 – силовая установка; 66 – топливный бак; 72 – БДГ-Д; 143 –стыковочный узел; 144 – соединительный узел ГМ; 145 – ГМ; 146 – распределительный узел; 152 – пусковая для ракет СХТ; 165 – БОТ.
Фиг. 9 – внутренняя схема монитора (вид сзади), где:
13 – светодиодный маяк; 14 – манипулятор; 15 – силовой гидравлический блок питания; 18 – ПИК; 44 – линейная ось манипулятора; 69 – распылитель станции РУПС КБМ; 70 – коннектор насосной станции КБМ; 72 – БДГ-Д; 143 – стыковочный узел; 144 – соединительный узел ГМ; 145 – ГМ; 146 – распределительный узел; 147 – насосная станция РУПС; 148 – автоматическая фильтровальная станция; 161 – тубус с картриджем твердого смачивателя; 150 – ёмкость внешнего водозабора; 152 – пусковая для ракет СХТ; 153 – заправочный клапан; 155 – дополнительный коннектор КБМ; 160 – внешний сканирующий блок КВН КБМ; 161 – тубус с картриджем твердого смачивателя.
Фиг. 10 – георадарный комплекс «ГРАД», где:
74 – БГ; 20 – ПМК; 75 – дверь отсека ГРАД; 76 – привод второй (выдвижной) секции БГ; 77 – поворотный привод БГ; 78 – привод подъёма первой секции БГ; 79 – опорная рама подъёма первой секции БГ; 80 – ЦГ; 81 – первая (неподвижная) секция БГ; 82 – поворотное основание первой секции БГ; 83 – привод двери отсека ГРАД; 165 – БОТ.
Фиг. 11 – внешнее устройство автономной грузовой платформы (вид сбоку) , где:
2 – бампер; 3 – прожектор светодиодный; 4, 7 – ВК; 12 – внешняя интегрированная антенна - приёмник GPS - ГЛОНАСС; 15 – силовой гидравлический блок питания; 16 – заправочная станция; 17 – автоматическая система пожаротушения; 21 – входной канал вил эвакуатора; 22 – ОЗУ; 23 – СКВ; 32 – капот КБМ; 143 –стыковочный узел; 144 – соединительный узел ГМ; 146 – распределительный узел; 147 – насосная станция РУПС; 152 – пусковая для ракет СХТ; 169 – внешний корпус платформы; 170 – БВКП; 171 – СУП; 172 – ГМ; 184 – грузовые танки; 185 – грузовая площадка.
Фиг. 12 – внутренняя схема автономной грузовой платформы (вид сбоку) , где:
2 – бампер; 3 – прожектор светодиодный; 12 – внешняя интегрированная антенна - приёмник GPS - ГЛОНАСС; 14 – манипулятор; 15 – силовой гидравлический блок питания; 16 – заправочная станция; 17 – автоматическая система пожаротушения; 21 – входной канал вил эвакуатора; 22 – ОЗУ; 23 – СКВ; 30 – выдвижные гермоконтейнеры КБМ; 32 – капот КБМ; 34 – инфракрасная PTZ – видеокамера; 35 – РЛС; 36 – РУПС; 39 – заправочная панель монитора; 44 – линейная ось манипулятора; 45 – ёмкость с дистиллированной водой; 46 – силовая установка; 58 – блок управления и кондиционирования СКВ; 59 – ЭМ; 60 – блок фильтров СКВ; 61 – вентилятор СКВ; 70 – коннектор насосной станции КБМ; 135 – приёмный люк; 143 –стыковочный узел; 144 – соединительный узел ГМ; 146 – распределительный узел; 147 – насосная станция РУПС; 152 – пусковая для ракет СХТ; 153 – заправочный клапан; 155 – дополнительный коннектор КБМ; 156 – цилиндрический пробоотборник; 159 – шланговый барабан насосной станции КБМ; 166 – заправочная штанга; 169 – внешний корпус платформы; 170 – БВКП; 171 – СУП; 172 – ГМ; 173 – ёмкость с водой; 174 – тяговые аккумуляторы; 175 – ёмкость с дизельным топливом; 176 – кассета с пробоотборниками; 177 – БПЛА.
Фиг. 13 – устройство базовой станции управления на двухпутном участке железной дороги, где:
33 – БПЛА; 84 – рельсовый путь эвакуатора; 90 – разъём зарядного устройства; 95 – кессон водосборный; 105 – направляющая портала; 106 – портал; 107 – каретка; 109 – площадка; 110 – корпус блок-контейнера базы; 111 – станция распылителя; 112 – топливораздаточная станция; 113 – водораздаточная станция; 114 – эмульсионная станция; 115 – зарядная станция; 116 – система отопления и вентиляции; 117 – сервисный модуль; 118 – система пожаротушения; 119 – насосно-смесительная станция; 120 – система водоподготовки (обратного осмоса); 121 – насосная станция; 122 – СВК; 123 – блоки управления базовой станцией; 124 – щит вводно-распределительный; 125 – подземная ёмкость с контактирующей жидкостью ДСК; 126 – подземная ёмкость с дизельным топливом; 127 – система водоочистки; 128 – подземная ёмкость с водой; 129 – дизель-генератор; 130 – световой барьер; 131 – глухое пересечение рельсовых путей; 132 – рельсовый путь; 133 – ССО; 134 – бесплатформенные железнодорожные весы; 135 – приёмный люк; 136 – приёмные трубы; 137 – бак - накопитель системы водоочистки; 138 – рельсовый путь; 139 – бак–накопитель спецотходов; 140 – ограждение базы; 141 –кассета изотермических ёмкостей временного хранения жидкостей и растворов; 142 – силовая линия основного источника электроснабжения; 164 – спецконтейнер; 168 – сервисная площадка для ГМ; 180 – монитор; 181 – эвакуатор; 182 – рельсовый путь; 183 – блок-контейнер; 186 – КТСМ.
Фиг. 14 – устройство эвакуационной станции на двухпутном участке железной дороги, где:
84 – рельсовый путь эвакуатора; 109 – площадка; 110 – корпус блок-контейнера базы; 116 – система отопления и вентиляции; 117 – сервисный модуль; 118 – система пожаротушения; 120 – система водоподготовки (обратного осмоса); 121 – насосная станция; 125 – ёмкость с контактирующей жидкостью ДСК; 126 – подземная ёмкость с дизельным топливом; 128 – подземная ёмкость с водой; 129 – дизель-генератор; 130 – световой барьер; 131 – глухое пересечение рельсовых путей; 132 – рельсовый путь; 133 – ССО; 134 – бесплатформенные железнодорожные весы; 135 – приёмный люк; 136 – приёмные трубы; 138 – рельсовый путь; 140 – ограждение базы; 142 – силовая линия основного источника электроснабжения; 178 – кабельный барабан; 179 – комплекс управления и связи; 180 – монитор; 181 – эвакуатор; 186 – КТСМ.
Фиг. 15 – внешнее устройство эвакуатора, где:
84 – рельсовый путь эвакуатора; 85 – рама; 86 – балласт; 87 – тяговые аккумуляторы; 88 – винтовой укос; 89 – привод механизма подъёма; 90 – разъём зарядного устройства; 91 – неподвижная рама; 92 – ведущая колёсная пара эвакуатора; 93 – вилы эвакуатора; 94 – каретка; 132 – рельсовый путь; 178 – кабельный барабан (вариант эвакуатора для эвакуационной станции).
Фиг. 16 – устройство и принцип действия роботизированного сервисного комплекса, где:
95 – кессон водосборный; 96 – мойка днища; 97 – распылитель; 98 – зарядный коннектор ; 99 – топливозаправочный коннектор; 100 – шланг топливный; 101 – силовой кабель; 102 – шланг высокого давления; 103 – привод портала; 104 – привод каретки; 105 – направляющая портала; 106 – портал; 107 – каретка; 108 – манипулятор; 111 – станция распылителя; 112 – топливораздаточная станция.
Фиг. 17 – способы заправки монитора, где:
14 – манипулятор; 70 – коннектор насосной станции КБМ; 153 – заправочный клапан; 166– заправочная штанга; 167 – коннектор.
Перечень принятых в описании сокращёний:
Термин «функциональное оборудование» включает системы подготовки воды и топлива, утилизации отходов моечного процесса или дезактивации оборудования, системы отопления, вентиляции, обеспечения безопасности и контроля периметра станции и т.д.
Многофункциональной автономный роботизированный комплекс «МАРК» (далее – МАРК) функционирует под управлением оператора ИСУЖТ (Единой интеллектуальной системы управления и автоматизации производственных процессов на железнодорожном транспорте).
МАРК состоит из мобильной и стационарной частей (показано на фиг. 1). Мобильная часть состоит из подвижных единиц, представляющих собой беспилотные съёмные рельсовые транспортные средства (далее – БРТС) различного назначения – мониторы и автономные грузовые платформы (далее – платформы). Назначение БРТС – периодический и постоянный мониторинг железнодорожной инфраструктуры, а также перевозка и доставка грузов различного назначения.
Стационарная часть состоит из установленной в полосе отвода железной дороги базовой станции управления и технического обслуживания (далее – базы) и сети эвакуационных станций, в составе которых находятся автоматизированные устройства для установки и съёма с путей БРТС (далее – эвакуаторы). Благодаря эвакуаторам, МАРК может быть установлен в любой точке перегона, что делает его независимым от станционных и подъездных путей, обеспечивая регулярные проверки на участках высокоскоростных магистралей, где из-за плотного трафика крайне сложно выделять «окна» плановых проверок инфраструктуры для работы измерительных лабораторий и автомотрис.
Основные функции управления МАРК и технического обслуживания БРТС сосредоточены на базе, занимающей центральное место комплекса. В то же время установку на рельсы и заправку БРТС на протяжении всего участка работы МАРК производят более экономичные и простые в обслуживании эвакуационные станции.
Количество БРТС и эвакуационных станций определяется их задачами и протяжённостью участка работы МАРК.
БРТС созданы на универсальной рельсовой платформе МАРК и представляют собой семейство машин, имеющих модульную структуру, общие узлы и компоненты. В зависимости от оснащения, БРТС могут выполнять различные задачи как гражданского, так и военного направления. Монитор – одна из этих машин, предназначенная (в зависимости от оснащения) как для диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры – рельсового пути и балластной призмы, мостов, туннелей, откосов и насыпей, так и для ведения технической разведки железных дорог в составе подразделений технической разведки железнодорожных войск (ЖДВ), разведки гражданской обороны (ГО разведки), радиационной, химической и биологической разведки (РХБ разведки) войск радиационной, химической и биологической защиты (РХБЗ). При этом монитор сочетает возможности проведения как наземной, так и воздушной разведки с применением БПЛА. Средствами видеонаблюдения, радиолокации, технического и экологического контроля монитор обеспечивает сбор информации о наличии чрезвычайных ситуаций природного и техногенного характера, в том числе о наличии в воздухе радиоактивных, аварийно химически опасных и отравляющих веществ АХОВ (ОВ), нарушении геометрии пути и остродефектных рельсах, просадках, размывах земляного полотна, заносах, загромождениях, температурных выбросах пути и других неисправностях.
Те же средства наблюдения и диагностики, дополненные специальным оборудованием и алгоритмами, применимы для ведения инженерной и мультиспектральной разведки, обнаружения оптико-электронных приборов (ОЭП) и дистанционного блокирования радиоуправляемых взрывных устройств (РВУ), а также для выявления, обезвреживания и уничтожения взрывных устройств с использованием разрушителей боеприпасов.
Длительная работа мониторов в автономном режиме и на большом удалении от баз и станций требует дополнительных ресурсных мощностей, которые обеспечивают платформы, конструктивно представляющие собой упрощённую специализированную версию монитора. Платформы доставляют в зону работы мониторов необходимое оборудование, топливо, воду и технические жидкости, используя грузовые и специальные модули. Они также способны возвращать из зоны работы мониторов образцы собранных ими материалов, оборудование и людей в грузовых и специальных (технологических и медицинских) модулях. Это позволяет монитору работать в зоне природной или техногенной катастрофы длительное время, не выходя из неё, что особенно важно в случае заражения территории радиоактивными, химическими или биологическими веществами, так как минимизирует контакты монитора с населением и личным составом. Кроме того, платформы обеспечивают функционирование баз в штатном автономном режиме (заполнение подземных ёмкостей, доставка оборудования, грузовых модулей и обслуживающего персонала).
В состав МАРК входит:
1. Монитор, в состав которого входит:
1) бортовой вычислительный комплекс монитора (БВКМ)
2) система управления монитором (СУМО)
3) дефектоскопический комплекс (ДСК)
4) система видеоконтроля рельсового пути (ВКП)
5) система габаритного контроля приближения строений (ГК)
6) путеизмерительный комплекс (ПИК)
7) профилометрический комплекс (ПМК)
8) георадарный комплекс (ГРАД)
9) комплекс видеонаблюдения (КВН)
10) осветительный комплекс (ОК)
11) беспилотный летательный аппарат (БПЛА)
12) радиолокационная станция (РЛС)
13) модуль экологического мониторинга (МЭМ)
14) роботизированная установка пожаротушения и спецобработки (РУПС)
15) комплекс бортовых манипуляторов (КБМ)
16) система кондиционирования и вентиляции (СКВ)
17) система гидро – пневмо очистки (ГПО)
18) грузовой или специальный модуль (ГМ и СМ)
2. Платформа, в состав которой входит:
1) бортовой вычислительный комплекс платформы (БВКП)
2) система управления платформой (СУП)
3) беспилотный летательный аппарат (БПЛА)
4) радиолокационная станция (РЛС)
5) роботизированная установка пожаротушения и спецобработки (РУПС)
6) система кондиционирования и вентиляции (СКВ)
7) комплекс бортовых манипуляторов (КБМ)
8) грузовой или специальный модуль (ГМ и СМ)
3. Базовая станция управления и технического обслуживания МАРК (база), в состав которой входит:
1) стационарный вычислительный комплекс (СВК)
2) эвакуатор
3) беспилотные летательные аппараты (БПЛА)
4) роботизированный сервисный комплекс (РСК)
5) сервисный модуль
6) система отопления и вентиляции
7) система пожаротушения
8) система водоподготовки (обратного осмоса)
9) система водоочистки
10) насосная станция
11) насосно-смесительная станция
12) дизель-генератор
13) подземные ёмкости для топлива, воды и технических жидкостей
14) контрольный пост (КП)
4. Эвакуационная станция, в состав которой входит:
1) комплекс управления и связи
2) эвакуатор
3) сервисный модуль
4) насосная станция
5) дизель-генератор
6) подземные ёмкости для топлива, воды и технических жидкостей
На фиг.2 – 10 показано внешнее устройство и внутренняя схема монитора, который представляет собой мобильную платформу, оборудованную тяговым электродвигателем силовой установки (46), обеспечивающей движение до уровня установленных скоростей обращения поездов на участках пути, подлежащих контролю, и получающей электрическую энергию от блока тяговых литий-титанатных аккумуляторов (42) с подзарядкой от дизель-генераторной установки. Монитор оснащён бортовым вычислительным и навигационно-связным комплексами (8), системой управления монитором (9), средствами видеонаблюдения и радиолокации местности (3-7,34, 35, 37, 38, 40, 43), беспилотным летательным аппаратом (33), модулем экологического мониторинга, включающего автоматический метеорологический комплекс (АМК) (62), комплекс приборов радиационной разведки и контроля (63), автоматический газосигнализатор (67) и прибор химической разведки дистанционного действия (ПХРДД) (73), системой габаритного контроля приближения строений (26), системами визуального, магнитного и ультразвукового контроля рельсового пути (19), системой видеоконтроля рельсового пути (24), путеизмерительным (18) и профилометрическим (20) комплексами, системой георадиолокационного контроля балластного слоя и подбалластной зоны (11), комплексом бортовых манипуляторов (14), включающим гермоконтейнеры для проб (30), коннектор насосной станции КБМ (70) и распылитель станции РУПС КБМ (69), связанный с роботизированной установкой пожаротушения и спецобработки РУПС (36). Дополнительно при помощи стыковочных узлов (143) и соединительных узлов ГМ (144), на монитор могут быть установлены грузовые модули (145, 151), представляющие собой резервные топливные ёмкости, технические или медицинские модули, а также дистанционно управляемые платформы вооружения (боевые модули), например, комплекс вооружения с 7,62 мм пулеметом ПКТМ и оптико-электронной системой прицеливания. Кроме того, монитор может быть оборудован средствами обнаружения ОЭП, средствами радиоэлектронной борьбы и устройствами дистанционной блокировки РВУ.
Монитор может быть установлен или удалён с путей при помощи эвакуатора (фиг. 15), размещённого на базе или эвакуационной станции (фиг. 13, 14), представляющей собой блок-контейнер (110), установленный в полосе отвода железной дороги, на бетонированной площадке (109) с заглублёнными ёмкостями для воды (128), топлива (126) и технических жидкостей (125). Работа МАРК на двухпутном участке железной дороги обеспечивается переносом монитора эвакуатором с одного рельсового пути (132) на другой (138), через глухое прямоугольное пересечение (131).
В отличие от существующий аналогов, МАРК является полностью автономной роботизированной системой, предназначенной для интеграции в технологические программы РЖД, такие как ИСУЖТ. МАРК является прототипом одной из частей перспективной системы управления железнодорожным транспортом, соединяя в себе функционал отдельных служб путевого контроля – постоянных, текущих, периодических и специальных осмотров и измерений. Вместе с тем, благодаря многоуровневой системе безопасности, МАРК может быть интегрирован в существующие «пилотируемые» системы управления железнодорожным транспортом.
МАРК включает в себя беспилотные рельсовые транспортные средства (БРТС), созданные на общей технологической платформе, а также эвакуационные станции и базовую станцию управления и технического обслуживания. Входящие в эту систему элементы обеспечивают комплексу возможности длительной безопасной работы без участия операторов и технического персонала. Функционал комплекса позволяет проводить быстрые изменения модульной структуры БТРС для выполнения различных задач на большом удалении от источников энергоснабжения. Управление БТРС может осуществляеться в автономном, базовом, оперативном режиме через прямое управление оператором, а также в кооперативном режиме через постановку задачи оператором интеллектуальной системе управления БТРС.
Сравнение методов и способов мониторинга железнодорожной инфраструктуры, даёт МАРК ряд преимуществ. Чем выше грузонапряжённость главных путей железных дорог, тем сложнее составлять для них схемы контроля. МАРК гораздо более гибкий инструмент для такого расчёта, т. к. размещается на любом отрезке перегона и не нуждается в станционных и подъездных путях, железнодорожных узлах или раздельных пунктах для пропуска поездов по участку и удаляются (устанавливаются) на пути при помощи эвакуаторов, расположенных в стационарной части комплекса.. Наличие эвакуатора для быстрой установки и съёма монитора с путей, включая его перенос на двухпутном участке для движения в обоих направлениях, позволяет монитору и платформе максимально эффективно работать в интервалах между поездами.
При обнаружении дефекта средствами магнитной диагностики на максимальной рабочей скорости 140 км/час монитор МАРК не только фиксирует его, но и способен быстро вернуться на точное место обнаружения дефекта для более подробной оценки ультразвуковыми диагностическими средствами. В отличие от дефектоскопических вагонов, МАРК эффективен как на больших (до 140 км/ч), так и на средних (до 60 км/ч) и малых скоростях (до 4 км/ч), замещая три основных средства неразрушающего контроля (НК) – вагон-дефектоскоп, дефектоскопную автомотрису и съемный дефектоскоп. При этом стоимость оборудования контроля значительно ниже по сравнению с высокоскоростным оборудованием дефектоскопических поездов (МДК) при том же качестве контроля. Стоимость оборудования, работы и обслуживания МАРК кратно ниже по сравнению с вагонами – дефектоскопами. МАРК не нуждается в отдельном локомотиве, вагоне для проживания персонала, вагоне – столовой и т.д. МАРК представляет собой комплекс технических средств контроля и железнодорожной разведки, имея в своём составе как подвижные единицы для осуществления «подробного» периодического контроля на перегонах, так и стационарную часть для постоянного контроля движения транспортных средств на участках размещения базовой и эвакуационных станций, включая систему счёта осей, весовой контроль, диагностику ходовых частей железнодорожного подвижного состава и т.д. Независимая установка/удаление с путей и сравнительно невысокая стоимость оборудования, а также дублирование основных функций управления и обслуживания подвижных единиц МАРК позволяет эффективно вести непрерывный контроль железнодорожной инфраструктуры в режиме 24/365.
Роботизированные комплексы МАРК применимы на участках дорог, где существует риск крушения тяжёлой транспортной техники (в зонах боевых действий, экологических и техногенных катастроф, вдоль склонов, подвергающихся опасности обрушения и селевых сходов, на участках возможных размывов, выбросов пути и т.д.) Использование традиционных типов средств НК – съёмных дефектоскопов, дефектоскопных вагонов и автомотрис на таких опасных участках невозможно, т.к. сопряжено с риском для жизни и здоровья операторов.
Благодаря защищённому исполнению внешнего корпуса монитора, эффективной и безопасной (искрозащищённой) системе вентилляции, охлаждению и гидро-пневмоочистке (ГПО) оптических элементов, роботизированной установке пожаротушения и спецобработки (РУПС) и использованию «сухой воды» для пожаротушения отсеков, МАРК способен вести пожарную разведку. Распылённая струя воды установки противопожарной высокого давления (УПВД РУПС) и система ГПО охлаждают корпус монитора, защищая оптические элементы и электронику от перегрева. С помощью дефектоскопического комплекса (ДСК), модуля экологического мониторинга (МЭМ), инфракрасных, тепловизионных и гиперспектральных камер монитор ведёт сбор и обработку информации о распространении пожара и его последствиях для железнодорожной инфраструктуры и прилегающих к путям территорий. Альтернативные варианты исключают мобильный наземный и низковысотный воздушный контроль из-за высокой температуры и турбулентности атмосферы над очагами пожаров.
МАРК также способен вести радиохимическую разведку и непрерывное РХБ наблюдение на объектах железнодорожной инфраструктуры в очагах применения оружия массового поражения (ОМП), а также в очагах химического и радиационного заражения в качестве машины РХБ разведки. В задачи МАРК входит ведение РХБ наблюдения (обнаружение с помощью приборов ОВ и других токсичных веществ, биологических средств в воздухе, измерение мощностей доз излучения на местности; оповещение войск о радиоактивном, химическом и биологическом заражении; контроль за изменением мощностей доз излучения на местности и заражения воздуха ОВ (ТХВ); обозначение границ участков заражения; взятие проб воздуха, воды и почвы и отправка их в лаборатории; ведение метеорологического наблюдения). Управляющая автоматика и вычислительная электроника монитора расположены в герметичных отсеках, имеющих собственный контур спецвентилляции, противохимическую и противорадиационную защиту (кислотоустойчивые уплотнители дверей и свинцовые пластины внутренней обшивки). Для дополнительной герметизации в отсеках создаётся постоянное избыточное давление. Роботизированная установка пожаротушения и спецобработки монитора и роботизированный сервисный комплекс базы производят мойку, дегазацию, дезактивацию, дезинфекцию и дезинсекцию монитора и помещения базы. Благодаря наличию базы возможно полностью или частично исключить контакты монитора с операторами и личным составом, ограничивая их заправкой подземных топливных и жидкостных ёмкостей, что также возможно производить беспилотными транспортными средствами. В этих условиях мониторы могут присутствовать в зонах радиационно-химического поражения в качестве специализированной машины разведки практически неограниченное время, обеспечивая командование результатами технической и радиационно-химической разведки.
Мониторы МАРК могут сопровождать гражданские поезда и военные эшелоны с личным составом и техникой, следуя перед ними на большой скорости и значительном удалении.
В качестве комплекса сопровождения монитор исследует железнодорожную инфраструктуру и окружающую местность различными средствами радиолокации и видеонаблюдения, проверяет исправность рельсового полотна, балластного слоя и подбалластной зоны железнодорожного полотна, контролирует габариты прохождения туннелей и прилегающих к путям объектов. Модуль экологического мониторинга (МЭМ), объединяющий радиационный, метеорологический и химический контроль, анализирует экологические параметры на пути следования монитора (погодные условия, шум, вибрации, электромагнитное и ионизирующее излучения, смог, запылённость, наличие в воздухе летучих органических соединений, опасных примесей и радиоактивных веществ). Автоматический газосигнализатор ведёт непрерывный или периодический контроль за состоянием воздуха, определяя тип и концентрацию АХОВ (ОВ).
Монитор также может использовать специальные алгоритмы работы средств визуального наблюдения, магнитной, оптической дефектоскопии и геолокации для обнаружения ОЭП, противотранспортных мин и СВУ, производить дистанционную блокировку РВУ и уничтожение взрывных устройств при помощи бортовых манипуляторов и разрушителей боеприпасов без детонации основного заряда.
Для ведения инженерной разведки и дистанционного обнаружения акустических, магнитных, оптоэлектронных датчиков и малогабаритных телевизионных камер, мин и взрывных устройств, оснащенных электронными взрывателями, БПЛА оснащается нелинейным радиолокатором, позволяющим определять СВУ с высоты не менее 30 метров. Даже в случае поражения «низкотехнологичной» миной с механическим взрывателем, крушение или подрыв монитора на значительном расстоянии от сопровождаемого эшелона не повлечёт за собой человеческих жертв и не приведёт к существенному повреждению железнодорожного полотна, давая возможность его быстрого восстановления.
В специализированном исполнении монитор может представлять собой железнодорожную версию боевой противодиверсионной машины БПДМ «Тайфун-М» со значительно расширенными возможностями в качестве машины сопровождения стратегических ракетных комплексов подвижного железнодорожного базирования (БЖРК) РВСН для поиска потенциально опасных объектов и защиты от возможных диверсий на маршрутах патрулирования.
Ссылки: БПДМ «Тайфун-М» (индекс 15Ц56М) создана НПО «Стрела» и ООО «ВПК»
https://topwar.ru/77939-boevaya-protivodiversionnaya-mashina-15c56m-tayfun-m.html
http://nevskii-bastion.ru/typhoon-m/) (https://www.youtube.com/watch?v=XzhqsUFUqJM
https://www.youtube.com/watch?v=d3_Bbo1WE14
Применение МАРК в качестве комплекса сопровождения поездов значительно ускоряет оперативную переброску войск, мобилизационные, снабженческие и эвакуационные перевозки, повышает надёжность и безопасность транспортировки людей и техники. В современных условиях технического прикрытия протяжённого железнодорожного направления и большого количества порученных объектов железнодорожного транспорта особенно важен контроль технического состояния участка в режиме реального времени. В настоящее время для подобных задач применяются поезда-миноискатели, представляющие собой несколько платформ с щебнем, идущие перед локомотивом. Ссылки: https://www.youtube.com/watch?time_continue=9&v=X7rtmQSpOqc
Применение мониторов МАРК в качестве специализированных технологических машин поддержки подразделений технической разведки железнодорожных войск значительно расширяет возможности технического прикрытия потенциально критических объектов без увеличения численности штатного состава подразделений.
Работа монитора в паре с автономной грузовой платформой значительно расширяет функциональные возможности МАРК в автономном режиме работы вне доступности баз и источников топлива и воды.
Учитывая эти и другие возможные обстоятельства, эффективность робототехнических комплексов намного выше существующей альтернативы в сегменте мобильных устройств неразрушающего контроля. Напротив, использование дефектоскопических вагонов максимально эффективно для проведения полномасштабных комиссионных проверок состояния систем железнодорожной инфраструктуры.
Существует четыре основных способа управления мониторами и платформами:
– автономный, через БВКМ или БВКП;
– базовый, через СВК;
– оперативный, через прямое управление оператором
– кооперативный, через постановку задачи оператором или удалённым оператором ИСУЖТ интеллектуальной системе управления монитора или платформы.
Возможно одновременное применение нескольких способов управления, когда монитор выполняет поставленную задачу в автономном режиме, а база ведёт непрерывный контроль, внося необходимые управляющие коррективы с участием оператора. Применение элементов искусственного интеллекта в перспективе значительно расширит возможности принятия решений в режимах автономной работы. Каждый из перечисленных способов применяется в зависимости от обстановки (потеря связи с базой, сложная оперативная обстановка, аварийная ситуация и т.п.). Режимы автономной работы вводятся при наступлении следующих ситуаций:
- невозможность выполнения оперативной задачи;
- возникновение ситуации, определяемой как угроза транспортной инфраструктуре;
- наличие ситуации, определяемой как угроза общественной безопасности.
Для обеспечения безопасной работы МАРК применяется аварийный протокол связи, дублирующий передачу аварийных и оперативных кодов между мониторами и базами в пределах ближайших контрольных участков (оперативных зон). Рабочие (оперативные) и аварийные коды содержат информацию об основных режимах работы и географических координатах мониторов, информацию о прохождении поездами контрольных участков, а также информацию о наступлении нештатных ситуаций, включающих внешние факторы (климат, повреждение рельсового пути и т.д.). Обмен кодами происходит с высокой периодичностью по четырём направлениям – между монитором и оператором, между монитором и базой одной зоны, между базами соседних оперативных зон и между мониторами соседних оперативных зон. В случае получения аварийных кодов или неадекватных данных, а также прекращения передачи кодов на любом из направлений, вступает в действие аварийный регламент, в числе прочего предполагающий экстренную эвакуацию монитора, неспособного к самостоятельному движению, способом буксировки другим монитором, автономной грузовой платформой или иным транспортным средством до ближайшей базы. При этом функции контроля на участке передаются соседним комплексам МАРК. Таким образом, наступление экстренных и аварийных ситуаций на перегоне, а также координаты и рабочие характеристики мониторов отслеживаются постоянно, а выход из строя монитора или базы не окажет существенного влияния на общий уровень безопасности. Применение такой системы обмена данными даёт возможность сформировать безопасный график работы мониторов. Данное решение вполне применимо и к существующему способу управления железнодорожной инфраструктурой.
Создание новой базы и нового контрольного участка расширяет зону безопасности железнодорожных перевозок, в пределе образуя модульную систему тотального контроля железнодорожной инфраструктуры, дополненную мобильными средствами комплексного контроля (МДК). Это и многое другое делает незаменимым сам принцип создания подобных роботизированных комплексов контроля железнодорожной инфраструктуры.
1. Бортовой вычислительный комплекс монитора (БВКМ) (8) предназначен для обеспечения работы монитора в различных режимах управления и включает системы навигации и связи монитора с базой, удалённым оператором и оператором ИСУЖТ, аппаратно-программный комплекс управления контрольно-измерительными системами и систему энергоснабжения аппаратуры. БВКМ объединяет и обрабатывает данные контрольно-измерительных систем при помощи пакетной технологии компьютерных сетей Ethernet 18 с их привязкой к единой географической координате.
БВКМ производит первичную обработку и анализ данных с их последующей передачей стационарному вычислительному комплексу (СВК) (122) базы (фиг. 13) или оператору МАРК во время технической стоянки или, в случае необходимости, во время движения по спутниковой или технологической связи. Данные передают во внешние системы управления железнодорожной инфраструктурой через подвижные средства спутниковой связи или конвенциональный бортовой радиомодем УКВ-диапазона подвижной технологической радиосети обмена данными, обеспечивающей функционирование автоматизированных систем управления железнодорожным транспортом.
На основании полученных данных СВК формирует диагностическую карту рельсового пути, составляет график осмотров наиболее важных контрольных точек и создаёт оперативный план монитора с учётом путевого графика на контрольном участке. В автономном режиме БВКМ объединяет функции сбора и анализа данных, а в режиме кооперации - через постановку задачи оператором интеллектуальной системе управления монитора.
2. Дефектоскопический комплекс (ДСК) (19) (фиг. 2,5) предназначен для бесконтактного контроля рельсов средствами совмещенной магнитной и ультразвуковой диагностики. Совмещение магнитного и ультразвукового контроля в едином блоке имеет явные преимущества – компактность и точное совмещение дефектограмм, привязанных к одной точке. Наиболее оптимальное решение разработано ЗАО «Твема» (Россия) (патент на изобретение РФ №2603451, дата публикации 2016.11.27, МПК В61K 9/08, «Дефектоскоп совмещенного бесконтактного магнитного и ультра- звукового контроля рельсового пути»). Ссылка:
https://yandex.ru/patents/doc/RU2603451C2_20161127 https://tvema.ru/sites/default/files/catalog02.jpg ДСК является специализированной «беспилотной» версией этого дефектоскопа и представляет собой два дефектоскопических модуля ДСК, расположенных в герметичных отсеках (нишах), имеющих выдвижные заслонки на днище монитора (не показано). Между отсеками ДСК расположены ёмкости с контактирующей жидкостью для УЗ – дефектоскопии (56). Аппаратно-программная часть ДСК интегрирована в общую интеллектуальную систему управления монитора и является структурной частью БВКМ. Модуль ДСК (19) состоит из установленных на шасси несущей рамы ДСК (48) следящей и искательной систем, размещённых между электромагнитными катушками устройства намагничивания. Следящая система выполнена в виде продольной центрирующей балки следящей системы (53), закрепленной на двух параллелограммных механизмах (47) с возможностью их перемещения в плоскости, перпендикулярной продольной оси рельса. Центрирующая балка (53) расположена вдоль оси рельса, внутри электромагнитного контура, образованного двумя вертикальными электромагнитными катушками (50) и Π-образным сердечником электромагнитного контура ДСК (57). На концах продольной центрирующей балки (53) размещены актуаторы подъема и опускания искательной системы (49) (транспортный/рабочий режимы работы ДСК), состоящей из регулируемой по высоте актуаторами (55) планки подвеса искателей (54) с установленными ультразвуковыми искателями (51) и постоянными магнитами следящей системы (52).
3. Система видеоконтроля рельсового пути ВКП (24) предназначена для видеофиксации элементов верхнего строения пути в пределах рельсошпальной решетки с целью обнаружения поверхностных дефектов, таких как трещины на поверхности катания рельса, повреждение шпал, скреплений, стыков и сварных соединений и т.д. ВКП передаёт эти изображения с географической привязкой для последующей обработки и анализа с применением автоматизированных алгоритмов БВКМ и СВК. Используя специальные алгоритмы, ВКП действует отдельно или совместно с другим оборудованием монитора в качестве устройства обнаружения противотранспортных мин и СВУ .
ВКП использует широко применяемые в системах машинного зрения методы линейного сканирования для сбора и записи непрерывных изображений поверхности рельса с применением высокоскоростных линейных камер и систем освещения.
Ссылки: Rail Surface Imaging System (RSIS) ENSCO (США):
https://www.ensco.com/rail/track-imaging-systems
DMA’s Track Component Video Inspection System (TCVIS) (Италия):
http://www.dmatorino.it/track-component-video-inspection-system-tcvis/
Системы видеоинспекции проекта «СВОД» компании АО «Фирма Твема» (Россия):
http://tvema.ru/640 https://www.youtube.com/watch?v=33z0ow43fx8
Системы видеоконтроля НПЦ «ИНФОТРАНС» (Россия):
http://www.infotrans-logistic.ru/page.htm?title=%D0%92%D0%B8%D0%B4%D0%B5%D0%BE%D0%BA%D0%BE%D0%BD%D1%82%D1%80%D0%BE%D0%BB%D1%8C
4. Система габаритного контроля приближения строений (ГК) предназначена для регулярного обмера поперечного профиля объектов инфраструктуры (зданий, мостов, тоннелей, откосов, балластной призмы, контактной сети и т.д.). ГК состоит из трёх датчиков обмера поперечного профиля (ДПП), представляющих собой лазерные сканеры с высокой разрешающей способностью, работающие по принципу измерения фазового сдвига (2D – LIDAR). Два боковых и один центральный ДПП (26) (фиг. 3,5,6,7) установлены в защитных обоймах между корпусом монитора и бампером (2). Горизонтальный угол раскрытия ДПП – 1900 , рабочая область 0,7 m ... 80 m. Датчики установлены таким образом, чтобы перекрывать всю вертикальную плоскость обмера. Работа датчиков синхронизирована друг с другом, что позволяет проходить маршрут на более высокой скорости. Данные измерения могут быть преобразованы в 3D-изображение и синхронизированы с данными ПИК (18), ПМК (20) и ВКП (24).
Ссылка: 2D-LiDAR LMS511(https://www.sick.com/ru/ru/detection-and-ranging-solutions/-2d-lidar/lms5xx/lms511-22100-heavy-duty/p/p465947)
Ссылка: Комплекс скоростного трехмерного сканирования «ГАБАРИТ-М» АО «Фирма Твема» (http://tvema.ru/641)
5. Путеизмерительный комплекс ПИК (18) (фиг. 5,8) предназначен для измерения геометрических параметров пути, измерения рельсового профиля, ответвлений и пересечений. ПИК (18) состоит из четырёх блоков оптической триангуляции БОТ (165). В состав БОТ входят триангуляционные датчики, состоящие из осветительного лазера и приёмной видеокамеры. Два боковых и два центральных БОТ обеспечивают единую линию засветки рельсового профиля, ответвлений и пересечений.
Ссылка: DMA’s Turnout & Crossing Measurement System (TCMS)
(http://www.dmatorino.it/turnout-crossing-measurement-system-tcms/)
Путеизмерительная и профилометрическая система ENSCO Track Geometry Measurement System (TGMS) (США) https://www.ensco.com/rail/track-measurement-systems
6. Профилометрический комплекс ПМК (20) (фиг. 4,9) представляет собой упрощённую версию ПИК (18), предназначенную для измерения рельсового профиля.
Ссылка: Система контроля профиля рельса АО «Фирма Твема»: (http://tvema.ru/639)
Ссылка: DMA (Италия) http://www.dmatorino.it/rail-profile-measurement-system-rpms/
7. На фиг. 10 показано устройство георадарного комплекса ГРАД (11), предназначенного для определения георадиолокационного профиля балластного слоя и подбалластной зоны железнодорожного полотна. В результате анализа полученной радарограммы определяются основные факторы, влияющие на безопасность движения поездов (строение и деформации грунтов земляного полотна, зоны обводнённости и пониженной плотности), а также наличие инженерных сооружений и выявление скрытых объектов (кабелей, крупных неметаллических объектов, полостей и укрытых гравием и землёй предметов).
В отличие от существующих георадарных систем GPR (Ground penetrating radar), ГРАД имеет управляемую телескопическую систему подвеса антенных блоков, позволяющую исследовать склоны насыпей и стены тоннелей. Центральный радар (80) закреплён неподвижно, как и георадары в большинстве железнодорожных дефектоскопических комплексов «МГС» производства АО «Фирма ТВЕМА», АДК-И «ЭРА» производства АО НПЦ «ИНФОТРАНС».
Ссылки: Многоканальная георадарная система «МГС» (http://tvema.de/node/64);
АДК-И «ЭРА» (http://www.infotrans-logistic.ru/page.htm?title=%D0%90%D0%94%D0%9A-%D0%98%20%D0%AD%D0%A0%D0%90).
В отличие от «ЭРА» и «МГС», боковые георадары (БГ) (74) могут выходить за пределы монитора при помощи приводов выдвижной секции (76) и при необходимости разворачиваются поворотными приводами (77) (фиг. 10б). Закреплённые на опорной раме подъёма первой секции БГ (79) приводы подъёма неподвижной секции БГ (78) изменяют углы подъёма БГ, изменяя высоту расположения над рельсовым полотном и насыпью (фиг. 10в).
8.
На фиг. 4-6 показан комплекс видеонаблюдения (КВН), представляющий собой размещённую в отсеке (38) электромеханическую мачту (41) с установленной гиростабилизированной оптико-электронной системой (ГОЭС) (43). КВН собирает потоковые телеметрические данные, которые анализируются и обрабатываются в режиме реального времени с помощью оборудования и программного обеспечения БВКМ. Отдельным модулем КВН является внешний сканирующий блок КВН КБМ (160), выполняющий функции локальной видеосъёмки и сканирования объектов при помощи манипулятора (14). Подъём электромеханической мачты (41) осуществляется при помощи
опорно-поворотные устройства (ОПУ) с червячным приводом от гидравлического мотора (65).
9.
На фиг. 4-6 показан осветительный комплекс (ОК), представляющий собой размещённую в отсеке (37) электромеханическую мачту (41) с установленными светодиодными прожекторами заливного света (40). Мачта устойчива к ветровым нагрузкам до 15 м/сек.
ОК и КВН предназначены для:
- подробного видеоконтроля состояния сооружений верхнего строения пути и железнодорожной инфраструктуры (тоннели, мосты, насыпи, различные здания и сооружения) с максимальным приближением к обнаруженному дефекту.
- дистанционного обследования опасных участков пути, представляющих серьёзную угрозу безопасности движения поездов (размывы железной дороги, температурные выбросы пути и т.д.)
- сопровождения и технической поддержки аварийно-восстановительных мероприятий (освещение и видеоконтроль места проведения работ)
- проведения мультиспектральной разведки и обнаружения мин и СВУ в полосе железной дороги (с лазерным целеуказанием).
10.
Использование БПЛА (33) в составе МАРК значительно расширяет границы и уменьшает время проведения воздушной разведки одновременно с перемещением монитора и ограничивается лишь скоростью полёта самого дрона. Взлёт и посадка БПЛА на зарядную площадку с посадочным сенсором и световыми сигналами возможна при движении монитора. В зависимости от поставленных задач, БПЛА может оснащаться различными средствами инженерной разведки, представляя собой интегрированную систему с лидаром, видеокомплексом мультиспектральной разведки, георадаром и нелинейным радиолокатором, позволяющим определять СВУ с высоты не менее 30 метров.
Интегрированная система георадар-дрон позволяет обнаруживать подземные туннели потенциально опасные подземные и водные объекты, профилировать насыпи и проводить батиметрию.
Ссылки:
«Стрекоза» - комплекс дистанционного обнаружения СВУ на БПЛА производства АО «Группа Защиты-ЮТТА» (Россия) http://detektor.ru/prod/self/drone/strekoza/
Интегрированная система георадар-дрон (Дрон M600 PRO с георадаром - модель SE-150) производства SPH Engineering (США) https://russiandrone.ru/news/novyy_podkhod_k_ispolzovaniyu_sistemy_georadar_dron/?sphrase_id=2327
11.
Радиолокационная станция (РЛС) (35) предназначена для ближней разведки наземных целей, автоматического обнаружения и сопровождения движущихся объектов на фоне земной и водной поверхности; охраны объектов и территорий в том числе при отсутствии оптической видимости (в тумане, при запылении или задымлении атмосферы, снегопаде), для автоматизированной передачи данных о целях внешним потребителям и комплексирования с устройствами видеоконтроля и КВН монитора. РЛС представляет собой приёмопередатчик РЛС «Фара-ВР» (1Л111М) производства Тульского НПО «Стрела» с приводом, установленный в контейнере на электромеханической мачте (59), соединенные с блоком управления РЛС БВКМ. РЛС «Фара-ВР» обеспечивает одновременное автоматическое сопровождение не менее 3-х целей с определением их координат, скорости и направления движения с возможностью автоматического определения типа цели (человек-техника); обнаружение человека, танка, автомобиля на дальности 4, 8, 10 км соответственно в зоне 24-180 град. по азимуту и + 18 град. по углу места. При этом ошибки определения не превышают 3 м по дальности и 0,3 град. по угловым координатам. Потребляемая мощность - 12 Вт. Среднее время наработки на отказ - 5000 ч. «Фара-ВР» имеет встроенный контроль функционирования исправности изделия и его составных частей. Приемопередатчик станции включен в состав боевой противодиверсионной машины «Тайфун-М».
Ссылки: 1Л111М «Фара-ВР»:
http://roe.ru/catalog/protivovozdushnaya-oborona/vozdushnye-misheni/fara-vr/
12.
Модуль экологического мониторинга (МЭМ) представляет собой комплекс приборов и датчиков дозиметрического, метеорологического и химического контроля и предназначен для анализа экологических параметров на пути следования монитора (погодные условия, шум, вибрация, электромагнитное и ионизирующее излучения, смог, запылённость, наличие в воздухе летучих органических соединений, опасных примесей и радиоактивных веществ). В состав МЭМ входит автоматический метеорологический комплекс (АМК) (62), комплекс приборов радиационной разведки и контроля (63), автоматический газосигнализатор (67) и прибор химической разведки дистанционного действия (ПХРДД) (73). Автоматический метеорологический комплекс (АМК) (62) предназначен для автоматических измерений у поверхности земли мгновенных и вычисление усредненных значений метеопараметров: скорость и направление ветра, атмосферное давление, температура и относительная влажность воздуха. В состав АМК входит блок измерения метеорологических параметров, вычислительный модуль, входящий в состав БВКМ, метеомачта с приводом и защитный контейнер. Блок измерения метеорологических параметров представляет собой ультразвуковой термоанемометр, дополненный датчиком атмосферного давления и влажности воздуха (ультразвуковая головка УГИ), установленный на электромеханической мачте с высотой подъема - 3м и размещённый в автоматически открывающемся защитном цилиндрическом контейнере. АМК МЭМ является модифицированной версией бортового метеокомплекса БМК-01.
Бортовой метеокомплекс БМК-01 создан для использования в ВС РФ предприятием ООО «Сибаналитприбор» (г.Томск) на основе автоматизированного метеорологического комплекса АМК-03, разработанного Институтом мониторинга климатических и экологических систем (ИМКЭС СО РАН, г.Томск), и выпускается в соответствии с техническими условиями АМЯ1.700.031 ТУ.
Ссылки: (http://meteosap.ru/catalog/1b65b/) (http://militaryarticle.ru/vestnik-akademii-voennykh-nauk/2008-vavn/10746-bortovoj-meteorologicheskij-kompleks-na-baze
Отличие АМК МЭМ от БМК-01 состоит в управлении метеокомплексом. АМК не имеет отдельного пульта и блока вычислений и индикации (ВИИ) и управляется аппаратно-программным комплексом монитора при помощи вычислительного модуля, входящего в состав БВКМ.
Комплекс приборов радиационной разведки и контроля (63) предназначен для измерения мощности дозы гамма-излучения на местности, а также непрерывного автоматического контроля концентрации радиоактивных газов и аэрозолей для измерения объемной активности альфа-излучающих радионуклидов и бета-излучающих радионуклидов, содержащихся в виде аэрозолей в воздухе. В состав комплекса входят измеритель мощности дозы ИМД-24 и установка для измерения объемной активности радиоактивных аэрозолей УДАС-201(203М).
Измеритель мощности дозы и дифференциальных потоков гамма–излучения ИМД-24 производства ЦНИИ РТК (С-Пб, Россия) определяет мощность дозы гамма-излучения в диапазоне от 10-7 до 10 Гр/ч и поглощенную дозу непрерывного гамма-излучения в диапазоне от 10-5 до 50Гр. В состав ИМД-24 входят блок детектирования гамма-поиска (БДГП-У) (147) и блок детектирования гамма-излучения дозиметрический (БДГ-Д) (148)
(http://www.rtc.ru/ru/sredstva-radiatsionnogo-kontrolya/imd-24).
Установки для измерения объемной активности радиоактивных аэрозолей УДАС-201(203М) производства ООО НПП «РАДИКО» (г. Обнинск, РФ) выпускаются по техническим условиям ВШКФ413579.002(003) ТУ. Принцип действия приборов основан на анализе энергетического спектра частиц, испускаемых радионуклидами, осевшими на фильтре измерительной камеры в результате прокачки через него воздуха.
(http://radico.ru/katalog/oborudovanie/radiatsionnyj-kontrol/statsionarnyj/gazovaya-i-ayerozolnaya-sreda/udas201/?L=32121121121212.1); (http://www.radico.ru/?id=236)
Автоматический газосигнализатор ГСА-14 (67) относится к оптико-электронным фотоколориметрическим газосигнализаторам ленточного типа и предназначен для автоматического контроля воздуха с целью обнаружения в нем паров фосфорорганических отравляющих веществ (ФОВ). Контроль ведётся как в неподвижном положении монитора, так и в движении через воздухозаборный клапан (10) магистрали пробоотбора, оснащённый трубкой обогрева и электровоздушным клапаном.
Прибор химической разведки дистанционного действия (ПХРДД) (73) осуществляет РХБ наблюдение в неподвижном положении монитора и обеспечивает контроль РХБ обстановки в радиусе до 5 км. ПХРДД ведёт контроль заражённости парами ТХ атмосферы на основе пассивного инфракрасного спектрометра. ПХРДД разработан АО ЦПФ МГТУ им. Н.Э.Баумана (Россия) и предназначен для эксплуатации в составе мобильных комплексов для обнаружения паров широкого круга ТХ, в том числе их смесей, в приземном слое воздуха в полевых условиях на фоне топографических объектов, оповещении о их появлении в поле зрения приборов, индикации информации о концентрации веществ в многокомпонентной смеси, координатах направления и времени обнаружения, а также передачи информации о результатах обнаружения на аппаратуру передачи данных по согласованному протоколу обмена.
Ссылка:
https://cpf-bmstu.ru/index.php/%D0%BF%D1%80%D0%B8%D0%B1%D0%BE%D1%80%D1%8B-%D1%85%D0%B8%D0%BC%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%BE%D0%B9-%D1%80%D0%B0%D0%B7%D0%B2%D0%B5%D0%B4%D0%BA%D0%B8-%D0%B4%D0%B8%D1%81%D1%82%D0%B0%D0%BD%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D0%BE%D0%B3%D0%BE-%D0%B4%D0%B5%D0%B9%D1%81%D1%82%D0%B2%D0%B8%D1%8F-%D1%81%D0%B5%D1%80%D0%B8%D0%B8-%D0%BF%D1%85%D1%80%D0%B4%D0%B4-2-%D0%B8-%D0%BF%D1%85%D1%80%D0%B4%D0%B4-3
Средства МЭМ позволяют ведение радиационной и химической разведки, проведение дозиметрического и химического контроля непосредственно в очагах поражения, где недопустимо применение пилотируемых средств мобильной разведки железнодорожных войск и войск РХБЗ.
13.
Роботизированная установка пожаротушения и спецобработки (РУПС) (36) предназначена для автоматического тушения пожара, а также для охлаждения и орошения конструкций монитора растворами для дегазации, дезактивации, дезинфекции и дезинсекции. РУПС может производить распыленную струю воды для охлаждения корпуса монитора, оптических элементов и электроники от перегрева во время движения сквозь очаги возгораний. При этом образующийся пар эффективно поглощает тепловую энергию с одновременным вытеснением кислорода, останавливая горение. Для повышения эффективности охлаждения РУПС может применяеться совместно с ГПО. РУПС состоит из установки противопожарную высокого давления (УПВД) и двух станций РУПС КБМ, предназначенных для использования манипуляторами (14). УПВД состоит из насосного модуля высокого давления в составе насосной станции РУПС (147) и распылителя на управляемом лафетном устройстве (36), установленном на электромеханической мачте (59). Пожарный ствол распылителя формирует компактную или распыленную струю воды или спецраствора с изменяемым углом факела. Рабочее давление ствола до 170 атм и и небольшой расход воды до 10 л/мин обеспечивает эффективное тушение и спецобработку конструкций монитора и окружающей местности водными дезактивирующими растворами, суспензиями и растворами дегазирующих (дезинфицирующих) веществ в радиусе до 15 м, а также ликвидацию небольших очагов загорания (кусты и трава). Для дополнительного смачивания к входной магистрали подсоединяется тубус-смеситель (161). Внутрь тубуса вкладывается перфорированный металлический цилиндр, в который вставляется картридж (смачиватель). Станция РУПС КБМ состоит из моторизированного барабана для шланга высокого давления (158), всасывающего шланга, шланга высокого давления и распылителя (69). РУПС может использовать резервуары для воды и растворов (56), а также дополнительно подключаемые ёмкости с дистиллированной водой (45) системы ГПО. Для выполнения задач, связанных с работой в зонах пожарной опасности или очагах применения ОМП, подача воды или спецрастворов может производиться из дополнительно установленных на монитор резервных ёмкостей (145, 151), как показано на фиг. 2. Монитор также может забирать воду из естественных водоемов, открытых резервуаров или емкостей при помощи автоматической фильтровальной станции (148) и ёмкости внешнего водозабора (150). Подача шлангов высокого давления станции РУПС КБМ (69) и шлангов насосной станции КБМ (70) осуществляется шланговыми мотор-барабанами (158) и (159).
14.
Комплекс бортовых манипуляторов (КБМ) предназначен для освобождения путей от предметов, препятствующих движению монитора, разминирования и уничтожения взрывоопасных предметов, взятия проб в ходе проведения радиохимической разведки, тушения загораний и дегазации монитора, а также для заправки монитора топливом и жидкостями из ёмкостей, находящихся в досягаемых пределах. В состав КБМ входят 2 пары гидравлических роботизированных манипуляторов (14), распылители станции РУПС КБМ (69), коннекторы насосной станции КБМ (70), пневматические пилы (154), внешние сканирующие блоки КВН КБМ (160), дополнительные коннекторы КБМ (155) и гермоконтейнеры (30) для цилиндрических пробоотборников (156). Манипулятоы Kraft Predator (14) имеют семь степеней свободы и максимальную грузоподъёмность – 227 кг или 91 кг при полном вылете на 2м. В качестве привода манипуляторов используется силовой гидравлический блок питания (15). Манипуляторы установлены на линейных осях (44) и в случае необходимости могут объединять свои усилия для увеличения грузоподъёмности.
Ссылка: Kraft Predator http://www.krafttelerobotics.ru/manipulyatory-predator-tech.html
Манипуляторы оснащены параллельными двухчелюстными захватами, способными зажимать детали Т-профиля диаметром 1,9 мм. Ширина раскрытия захватов – 220 мм, сила сжатия – 1334Н. Захваты способны закладывать и извлекать предметы из под завала как самостоятельно, так и при помощи специальных коннекторов КБМ (154), расположеных в зажимах на задней стенке отсека КБМ. При помощи дополнительного коннектора (155), установленного на коннектор насосной станции КБМ (70) через магнит БРС, производится забор топлива, воды или спецрастворов из ёмкостей, находящихся на путях, как это показано на фиг. 5. Также возможен забор воды из открытых источников или ёмкостей при помощи автоматической фильтровальной станции (148) и ёмкости внешнего водозабора (150). Подача шлангов высокого давления станции РУПС КБМ (69) и шлангов насосной станции КБМ (70) осуществляется соответственно шланговыми мотор-барабанами (158) и (159). Подача кабелей внешних сканирующих блоков КВН КБМ (160) осуществляется кабельным мотор-барабаном (162). Работа мотор-барабанов полностью синхронизирована с работой манипуляторов (14). Внешний сканирующий блок КВН КБМ (160) представляет собой устройство, объединяющее в одном корпусе устойчивую к действию радиации цветную видеокамеру высокого разрешения с источником дополнительного освещения и сканер со сканирующим датчиком белого света. Устройство предназначено для оценки препятствий и ВУ с помощью манипулятора.
Ссылка: C983 System Camera производства Mirion Technologies (США)
https://www.mirion.com/products/c983-system-camera
Манипуляторы могут дополнительно оснащаться видеокамерами RC911 DOTCAM-HR (Mirion Technologies), устойчивыми к действию ионизирующих излучений:
Ссылка: https://www.mirion.com/products/rc911-dotcam-hr.
В отсеке КБМ размещены выдвижные гермоконтейнеры (30) для взятия проб в ходе проведения радиохимической разведки. Стенки гермоконтейнеров сварены из листов нержавеющей стали, между которыми расположен слой свинца толщиной 5 см. Цилиндрические пробоотборники (156) для твёрдых и жидких фракций захватываются манипуляторами (14) и вводятся в грунт или открытый источник для заполнения, после чего помещаются в съёмные кассеты (176) гермоконтейнера (30). Кассеты из нержавеющей стали имеют герметичные крышки с уплотнителями и могут быть открыты или закрыты при помощи размыкателя механизма выдвижения гермоконтейнера (30). Кассеты могут быть извлечены манипулятором (14) и помещены в спецконтейнеры после выхода из зоны, переданы платформе (показано на фиг. 12) или оставлены на открытой местности для последующей обработки. Также кассеты (176) могут быть помещены манипулятором (14) в спецконтейнер (164), установленный внутри бака–накопителя спецотходов (139), расположенного на территории базы (показано на фиг. 13).
Для выполнения специальных задач разминирования и уничтожения взрывоопасных предметов КБМ может применять модифицированные разрушители боеприпасов «Разрушитель Р-40» производства ФГУП «СКТБ «Технолог». Ссылка: http://sktb-technolog.ru/destroyer_r-40/. Конструкция разрушителя позволяет дистанционно воздействовать на артиллерийские боеприпасы (калибром от 76 до 152 мм) разрушая их без детонации основного заряда. «Разрушитель Р-40» представляет собой устройство, собранное в полимерном корпусе, снаряженное зарядом взрывчатого вещества массой 40 грамм и метательным элементом специальной формы. «Разрушитель Р-40» воздействует на уничтожаемый боеприпас таким образом, что его корпус сначала пробивается, затем разрушается избыточным давлением изнутри, взрывчатое вещество внутри корпуса частично испаряется, частично сгорает без детонации. Устройство приводится в действие штатными средствами взрывания. Для применения МАРК «Р-40» необходимо модифицировать жёсткими корпусными гильзами для его захвата манипулятором, а также устройствами закрепления и беспроводного подрыва. На испытаниях «Р-40» насквозь пробил танковую броню толщиной 40 мм.
Ссылка: https://www.youtube.com/watch?v=6QF579ofTQQ
Высокая разрушающая способность также позволяет использовать «Р-40» для разрушения препятствий. Закреплённые манипулятором на поверхности препятствия заряды могут расколоть бетонный блок или разрубить ствол дерева, тем самым открывая возможность дальнейшей расчистки путей манипуляторами КБМ. «Разрушители Р-40» могут быть вертикально размещены в ячейках выдвижного гермоконтейнера, усиленного броневыми пластинами толщиной 60мм для минимизации последствий самоподрыва зарядов. При этом броневые пластины не закрывают тонкое днище контейнера для направления кумулятивных струй в открытое пространство под монитором, без повреждения его основных систем.
В качестве дополнительных возможностей защиты монитора от радиоуправляемых взрывных устройств можно использовать различные блокираторы радиоуправляемых взрывных устройств, например ПЕЛЕНА-6БС-Ф. Изделие разработано по заказу Внутренних войск РФ для защиты от РВУ бронетехники и относится к аппаратуре выполненной по группе 1.6.5 ГОСТ РВ 20.39.304-98. Для повышения эффективности внешние коллинеарные антенны непосредственно соединены с передатчиками, что исключает соединительные в.ч. кабели и потери мощности в них. Размещается непосредственно на бронебазе и имеет в комплекте сферу для защиты антенн. Ссылка: https://antiterror.com.ru/blokiratory-unichtozhiteli/blokiratory-sotovoj-svjazi?product_id=3619
Также на монитор может быть установлен полноценный батальонный комплекс радиоразведки и радиоэлектронной борьбы (РР и РЭБ) РБ-531Б «Инфауна» производства Концерна «Созвездие». Ссылки: https://www.arms-expo.ru/news/meropriyatiya/obedinennaya-priborostroitelnaya-korporatsiya-vyvodit-na-eksport-kompleks-reb-infauna/ https://tvzvezda.ru/news/vstrane_i_mire/content/2019529129-jhmVM.html.
15.
Система кондиционирования и вентиляции (СКВ) (23) предназначена для охлаждения и обогрева ГМ и СМ, а также электронных компонентов монитора и состоит из двух вентиляторов (61) (нагнетающего и вытяжного), обеспечивающих вентиляцию и замкнутый контур кондиционирования воздуха через блок управления и кондиционирования СКВ (58), а также обеспечивает избыточное давление в отсеках монитора для их герметизации. Блоки фильтров (60) комплектуются в зависимости от выполняемых задач панельными искрогасителями, угольными и специальными фильтрами защиты от АХОВ (ОВ), радионуклидов, и т.п. В качестве альтернативы СКВ для экстремальных условий работы можно использовать модифицированную турбохолодильную систему кондиционирования воздуха танка Т-80.
16.
Система гидро – пневмо очистки (ГПО) (64) предназначена для очистки приборов диагностики и наблюдения от пыли и грязи, экстренного охлаждения и подачи звуковых сигналов. ГПО использует принципиальную модель гидропневмоочистки прибора наблюдения и прицеливания БМП2 при помощи водо-воздушной струи.
Известна система воздушно-жидкостной очистки прибора наблюдения БМП ТНПО-170А.
(ОА ВС РФ) (патент на полезную модель № 2327098, дата подачи заявки 2006.11.23, опубл. 2008.06.20, МПК F41G11/00, «Автоматизированная система гидропневмоочистки защитного стекла прицела-дальномера»). http://www.freepatent.ru/patents/2327098
Модификация данной версии заключается в гидропневмоочистке разветвлённой системы оптических элементов, включённой в общую систему управления монитора.
Тип и марка применяемого компрессора АК-150СВ - поршневой, трехступенчатый, двухцилиндровый воздушного охлаждения; Рабочее давление - 150 кгс/см2. Производительность - 2,4 м3/час; Количество и ёмкость баллонов - 2 по 5л.
17.
Грузовые и специальные модули (ГМ и СМ) устанавливаются на монитор или платформу при помощи стыковочных узлов (143) (фиг. 3, 11) и предназначены для увеличения времени автономной работы БРТС при отсутствии базовой поддержки, а также для выполнения специальных задач. В качестве грузовых модулей могут быть использованы резервные ёмкости с топливом или водой (145, 151) (фиг. 2). Специальные модули – различные технические, герметичные пассажирские или медицинские модули, а также дистанционно управляемые платформы вооружения (боевые модули), например, комплекс вооружения с 7,62 мм пулеметом ПКТМ и оптико-электронной системой прицеливания. Через соединительные узлы ГМ (144) может осуществляться электропитание и управление различными встроенными системами ГМ или СМ. Например, управление медицинским СМ может включать постоянный мониторинг состояния пострадавших в чрезвычайных ситуациях, а также проведение в автоматическом режиме необходимых анестезиолого-реанимационных действий (капельное введение препаратов, сердечно-легочная реанимация, инвазивная искусственная вентиляция легких (ИВЛ), дефибриляция и т.д.)
Ссылка: Модуль медицинский вертолетный двухместный ММВ.9520.000-03 (-04)
http://vysota.aero/catalog/42/5/
Для перевозки габаритных грузов платформы могут соединяться в пары и оснащаться различными демпфирующими устройствами для погрузки и закрепления длинномеров.
18.
На фиг. 13 показано устройство базы, расположенной в полосе отвода железной дороги и представляющей собой комплекс сооружений, состоящий из блок-контейнера (110), установленного на бетонированной площадке (109), а также предназначенного для перемещения эвакуатора одноуровнего отрезка железнодорожного пути (84), примыкающего (для однопутного участка) или пересекающего первый (132) и примыкающего ко второму участку двухпутного пути (138). В блок-контейнере размещается эвакуатор (181), предназначенный для установки и съёма с рельсов монитора (фиг. 15). В составе оборудования базы находится стационарный вычислительный комплекс (СВК) (122), включающий системы связи и управления монитором и эвакуатором (181), блоки управления базовой станцией (123), БПЛА (33), автоматическая система пожаротушения (118), система водоподготовки (обратного осмоса) (120), система водоочистки (127), насосно-смесительная станция (119), а также роботизированный сервисный комплекс (РСК) (Фиг.12), включающий мойку, зарядку аккумуляторов, заправку монитора дизельным топливом, водой и техническими жидкостями из подземных ёмкостей с чистой водой (128), дизельным топливом (126), контактирующей жидкостью ДСК (125), а также из установленной на территории базы кассеты изотермических ёмкостей временного хранения дезактивирующих растворов (141). На территории базы также установлены подземные ёмкости бака–накопителя системы водоочистки (137) и спецотходов (139) с размещённым внутри него спецконтейнером (165). Насосное оборудование заправочной станции (121) производит заполнение подземных ёмкостей через приёмный люк (135) по приёмным трубам (136). Доставку топлива или воды на базу могут осуществлять любые топливозаправщики, оснащённые совместимым заправочным оборудованием. Для работы и временного пребывания персонала базы оснащена системой отопления и вентиляции (116) и сервисным модулем (117), содержащим инструменты и механизмы для ремонта и опционального оснащения РСК. На территории базы расположена входящая в вводно-распределительный щит (124) силовая линия основного источника электроснабжения (142) и дизель-генератор (129), предназначенный для автономной работы базы, способный, в случае необходимости, обеспечивать работу вышки сотовой связи. Территория базы имеет ограждение (140) и световой барьер (130).
База и эвакуационная станция также могут иметь в своём составе контрольный пост (КП), в состав которого входит система счёта осей (ССО) (133), весовая станция с бесплатформенными железнодорожными весами (134) и многофункциональный комплекс технических средств для диагностики ходовых частей железнодорожного подвижного состава (КТСМ) (186).
Датчики ССО (133) предназначены для работы в системе индикации о свободности участка пути. Интерфейсы ССО передают информацию на системы вышестоящего уровня и обеспечивают возможность оптимальной интеграции в системы централизации (стрелок и сигналов) и сигнализации. Ссылка: Система счета осей и регистрации прохода колес Frauscher Sensor Technology (Австрия) https://www.frauscher.com/ru/axle_counting/#start
КТСМ (186) – Комплекс Технических Средств Многофункциональный для диагностики ходовых частей железнодорожного подвижного состава (КТСМ-02) производства предприятия «Инфотэкс АТ» (г. Екатеринбург) (http://infotecs-at.ru/products/4).
КТСМ-02 – микропроцессорная многофункциональная система автоматического контроля технического состояния железнодорожного подвижного состава, состоящая из перегонного концентратора информации и автоматизированного рабочего места оператора, размещённых на базе или станции. КТСМ-02 может комплектоваться подсистемами бесконтактного контроля перегретых буксовых узлов (т. н. детекторы горячих букс – Hot Box Detector, HBD) с использованием приемников ИК излучения, а также подсистемами контроля дефектов колес, заторможенных колесных пар или тележек, и подсистемой для обнаружения волочащихся деталей.
19.
Стационарный вычислительный комплекс базы (СВК) (122) (фиг. 13) предназначен для обеспечения работы базы в различных режимах управления и включает системы навигации и связи монитора с базой или удалённым оператором, аппаратно-программный комплекс управления сервисными системами и систему энергоснабжения аппаратуры. СВК обрабатывает данные контрольно-измерительных систем, полученные от БВКМ, соединяя их с данными ИСУЖТ и оперативной информацией (рабочие и аварийные коды) мониторов и баз смежных участков контроля. Результатом обработки информации из различных источников, включая данные контрольного поста, является составление подробной диагностической карты рельсового пути, графика осмотров наиболее важных контрольных точек и оперативного плана монитора с учётом путевого графика на контрольном участке с последующей передачей данных во внешние системы управления железнодорожной инфраструктурой через стационарные средства спутниковой связи или базовый радиомодем по стационарной технологической радиосети обмена данными на железнодорожном транспорте.
20.
Роботизированный сервисный комплекс (РСК) (показан на Фиг.16) предназначен для технического обслуживания базы, эвакуатора и транспортных средств МАРК. В задачу РСК входит ремонт, наладка, монтаж и комплектация грузовых модулей, зарядка тяговых аккумуляторов, заправка топливом, водой и техническими жидкостями, а также мойка и дезактивация транспортных средств МАРК, эвакуатора и внутреннего помещения базы. Насосное оборудование заправочной станции (121) производит заполнение подземных ёмкостей с дизельным топливом (126), водой (128) и контактирующей жидкостью ДСК (125) через приёмный люк (135) по приёмным трубам (136). Доставку воды и топлива на базу могут осуществлять любые топливозаправщики, оснащённые совместимым заправочным оборудованием. Содержимое ёмкостей подаётся заправочной станцией (121) к топливораздаточной станции (112), водораздаточной станции (113) и эмульсионной станции (114) для дальнейшей заправки монитора. Топливораздаточная станция (112) представляет собой моторизованный шланговый барабан с электроприводом для подачи топливного шланга (100) с топливозаправочным коннектором (99). Подобным образом оснащены водораздаточная станция (113), подающая обессоленную воду из системы водоподготовки (обратного осмоса) (120) и эмульсионная станция (114), предназначенная для подачи контактирующей жидкости ДСК. Заправка монитора и зарядка аккумуляторов производится при помощи роботизированного манипулятора (108), установленного на каретке (107), перемещаемой вдоль портала (106) с помощью привода (104). Портал (106) перемещается в направляющих (105) с помощью привода (103). Для проведения заправки монитора топливом портал (106) перемещает каретку (107) к топливораздаточной станции (112), после чего манипулятор (108) захватывает топливозаправочный коннектор (99) и перемещает его к заправочной панели монитора (39). Перемещение манипулятора синхронизировано с вращением мотор-барабана топливораздаточной станции (112). Аналогичным образом производится зарядка аккумуляторов и заправка водой или контактирующей жидкостью. Зарядная станция (115) предназначена для зарядки тяговых аккумуляторов монитора (42) через зарядные панели монитора (68) и эвакуатора (87) через разъём зарядного устройства (90) и представляет собой кабельный моторизованный барабан с силовым кабелем (101) и зарядным коннектором (98). Подача воды для мойки производится насосной станцией (119) на станцию распылителя (111) шлангом высокого давления (102) с распылителем (97). Так же подаётся вода для мойки днища монитора (96). Мойка производится в два этапа – через систему водоочистки (127) и чистой водой из подземной ёмкости (128). Для проведения обеззараживания или дезактивации на территории базы устанавливается кассета изотермических ёмкостей временного хранения дезактивирующих растворов (141), содержащая кислоты, растворы и эмульсии, добавляемые в воду для подачи на станцию распылителя (111). После очистки вода уходит через водосборный кессон (95) в бак – накопитель спецотходов (химически – опасных и радиоактивных) (139), откуда будет удаляться технологическим транспортом в систему спецканализации. Установка различных типов манипуляторов и дополнительного оборудования, размещённого в сервисном модуле (117), позволит расширить задачи технического обслуживания монитора, включая ремонтные операции (техосмотр, экологический и дозиметрический контроль оборудования, замена узлов и оборудования, сварка и т.д.)
21.
Эвакуационная станция (Фиг. 14) представляет собой упрощённую и экономичную версию базовой станции управления, предназначенную для заправки и эвакуации с путей мониторов и платформ, включая их перенос на двухпутном участке железной дороги. Применение эвакуационных станций значительно расширяет географию применения МАРК и наиболее эффективно для участков дорог с высоким трафиком движения, где «окна» плановых проверок инфраструктуры для работы измерительных лабораторий и автомотрис создаются крайне редко. Кроме того, эвакуационные станции могут выполнять роль конечных точек маршрута для небольших чартерных перевозок, вне зависимости от наличия товарных или пассажирских станций. На эвакуационной станции находится пополняемый (платформами) запас топлива и воды, что обеспечивает мониторам и автономным платформам значительный ресурс продолжительной работы. В отличие от базовых станций управления, расположенных в центре оперативной зоны МАРК, эвакуационные станции заполняют её целиком на всём протяжении железнодорожных путей, тем самым обеспечивая оптимальное размещение и стоимость ресурсов. Разделение функций с небольшим дублированием (заправка и эвакуация на базах), а также простота и функциональность эвакуационных станций позволяет устанавливать их практически в любом месте на участке пути в короткие сроки и с небольшими затратами. В перспективе также возможно создание мобильного варианта эвакуационной станции. В составе эвакуационной станции находятся эвакуатор (181), комплекс управления и связи (179), дизель-генератор (129), подземные ёмкости с дизельным топливом (126), водой (128) и контактирующей жидкостью ДСК (125), система водоподготовки (обратного осмоса) (120), сервисный модуль (117), содержащий необходимые элементы и инструменты для оперативного ремонта эвакуационной станции, а также системы пожаротушения (118), отопления и вентиляции (116). Электропитание привода эвакуатора (181) осуществляется при помощи кабельного барабана (178), связанного с колёсной осью эвакуатора (фиг. 15б). Эвакуационная станция также может иметь в своём составе контрольный пост (КП), в состав которого входит система счёта осей (ССО) (133), весовая станция с бесплатформенными железнодорожными весами (134) и многофункциональный комплекс технических средств для диагностики ходовых частей железнодорожного подвижного состава (КТСМ) (186).
22.
На фиг. 13-14 показан эвакуатор (181), размещённый в блок-контейнере (110). Эвакуатор представляет собой автоматизированную транспортную платформу, оборудованную системами позиционирования, установки и съёма с рельсов монитора. Перемещение эвакуатора осуществляется по отрезку рельсового пути (84) с помощью силовой установки (92), получающей электрическую энергию от тяговых литиевых аккумуляторов (87). Зарядку аккумуляторов (87) через разъём зарядного устройства (90) осуществляет манипулятор (108) роботизированного сервисного комплекса (показан на фиг. 16). Управление и позиционирование эвакуатора на рельсовом отрезке осуществляет монитор или удалённый оператор МАРК. Таким образом исключаются ошибки несанкционированного выхода эвакуатора на рельсовые пути вследствие ошибки стационарного вычислительного комплекса базы (СВК) (122), который может управлять эвакуатором только в пределах блок-контейнера базы (110). Съём и установка монитора на рельсовые пути происходит при помощи грузоподъёмных вил (93), помещённых во входной вилочный канал эвакуатора (21). При этом заранее винтовыми укосами (88) устанавливается угол положения неподвижной рамы (91). Это разовая установка угла необходима для юстировки взаимного положения осей вил и вилочного канала на каждом отдельном пункте расположения базы. Подъём монитора осуществляется перемещением каретки (94) в направляющих неподвижной рамы (91) при помощи винтового подъёмника, управляемого приводом (89). Для повышения устойчивости эвакуатора против опрокидывания применяются блоки балласта эвакуатора (86).
23.
На фиг. 11 и 12 показано устройство платформы, предназначеной для обеспечения работы базовых и эвакуационных станций (заполнение подземных ёмкостей, доставка оборудования, грузовых модулей и обслуживающего персонала), решения задач соопровождения и поддержки мониторов в автономном режиме, а также для небольших чартерных перевозок. Платформа представляет собой пециализированную версию монитора для перевозки грузов – топлива, воды и технических жидкостей в грузовых танках (184) и на грузовой площадке (185), а также для перевозки грузовых модулей (172) различного назначения. Платформа также способна выполнять ряд специальных задач, таких как пожаротушение и спецобработка, перевозка опасных грузов, а также эвакуация на сцепке платформы или монитора, неспособных к самостоятельному движению. В составе платформы находится система быстрой заправки монитора через заправочный клапан (153) при помощи заправочной штанги (166), способом, напоминающим систему дозаправки в воздухе. Основные способы заправки монитора показаны на фиг.17.
Таким образом, заявленный многофункциональный автономный роботизированный комплекс диагностики позволяет осуществлять оценку технического состояния объекта, обнаружение и определение места локализации неисправностей, прогнозирование остаточного ресурса объекта и мониторинг состояния как непрерывный процесс сбора и анализа информации о значении диагностических параметров состояния объекта. Заявленный комплекс позволяет эффективно и без риска для персонала осуществлять подобный мониторинг состояния объекта, а также вести железнодорожную разведку в условиях повышенной опасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2022 |
|
RU2798159C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Система контроля верхнего строения пути и элементов железнодорожной инфраструктуры на предмет несанкционированного воздействия | 2024 |
|
RU2831499C1 |
| МОБИЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2009 |
|
RU2438903C2 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| РОБОТИЗИРОВАННЫЙ, МОБИЛЬНЫЙ, МОДУЛЬНЫЙ ГОРНОСПАСАТЕЛЬНЫЙ КОМПЛЕКС И СПОСОБЫ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2682298C1 |
| Мобильный комплекс микропроцессорной системы управления стрелками и светофорами участка железной дороги | 2016 |
|
RU2622522C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Комплекс аппаратно-программных средств, создающий защищенную облачную среду с автономной полнофункциональной инфраструктурой логического управления с биометрико-нейросетевой идентификацией пользователей и с аудитом подключаемых технических средств | 2016 |
|
RU2635269C1 |
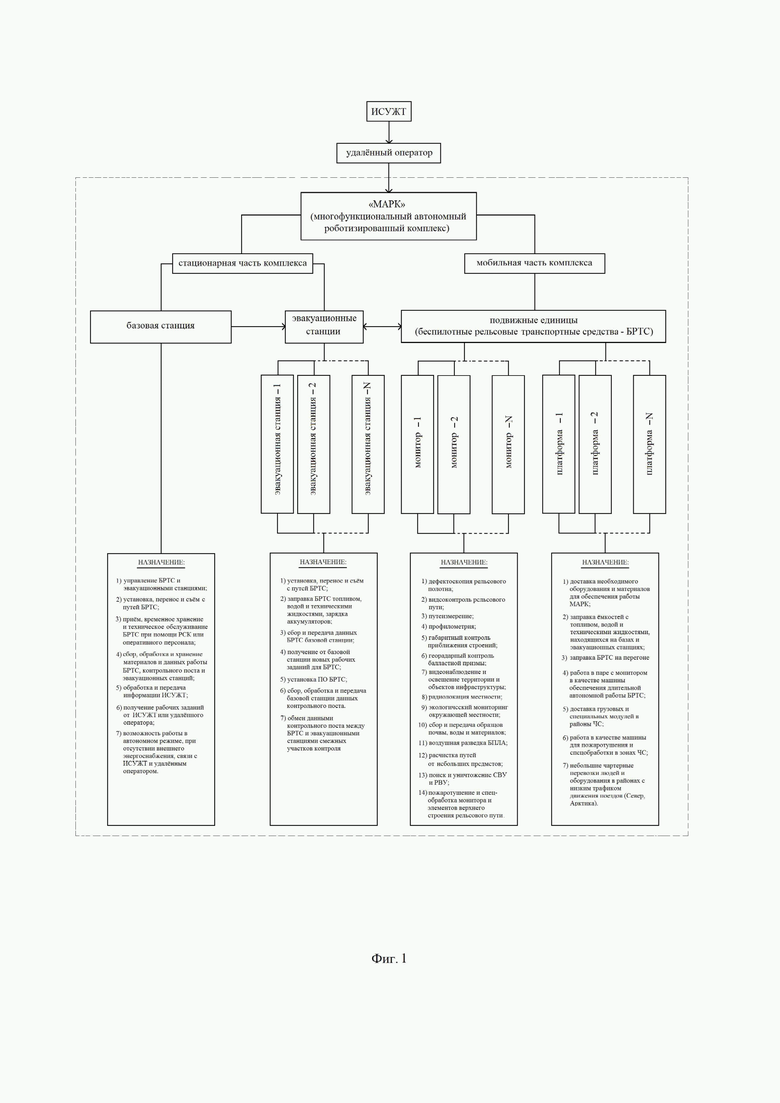
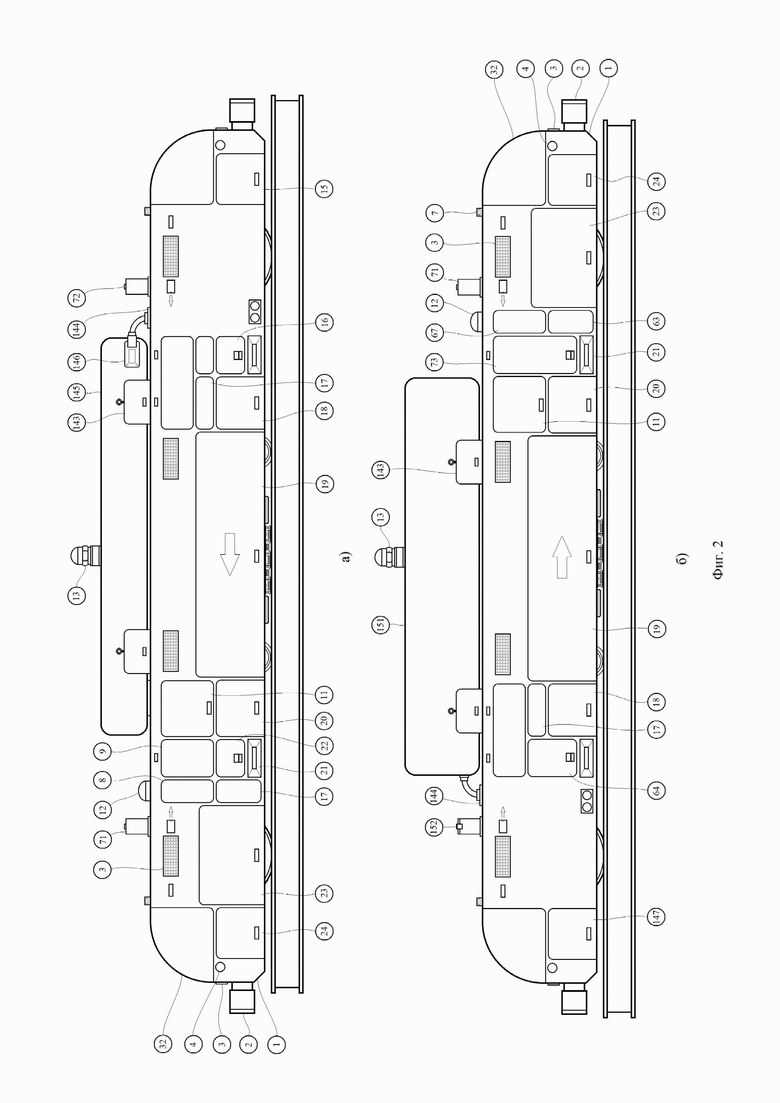
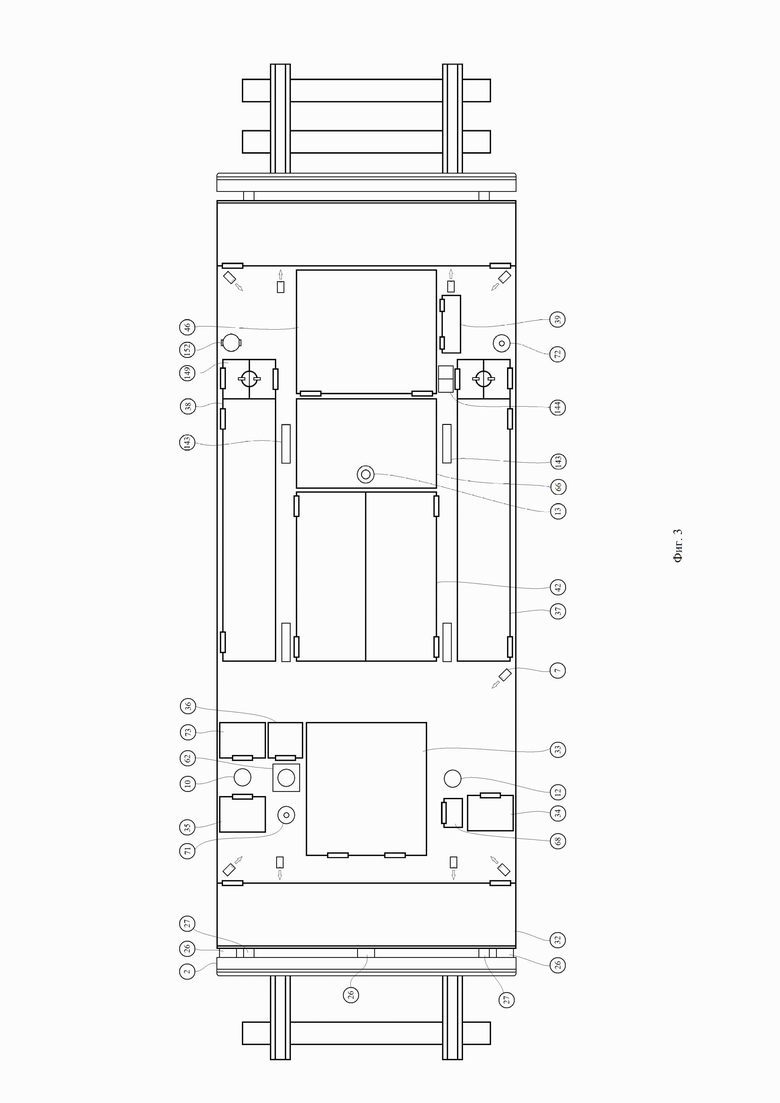
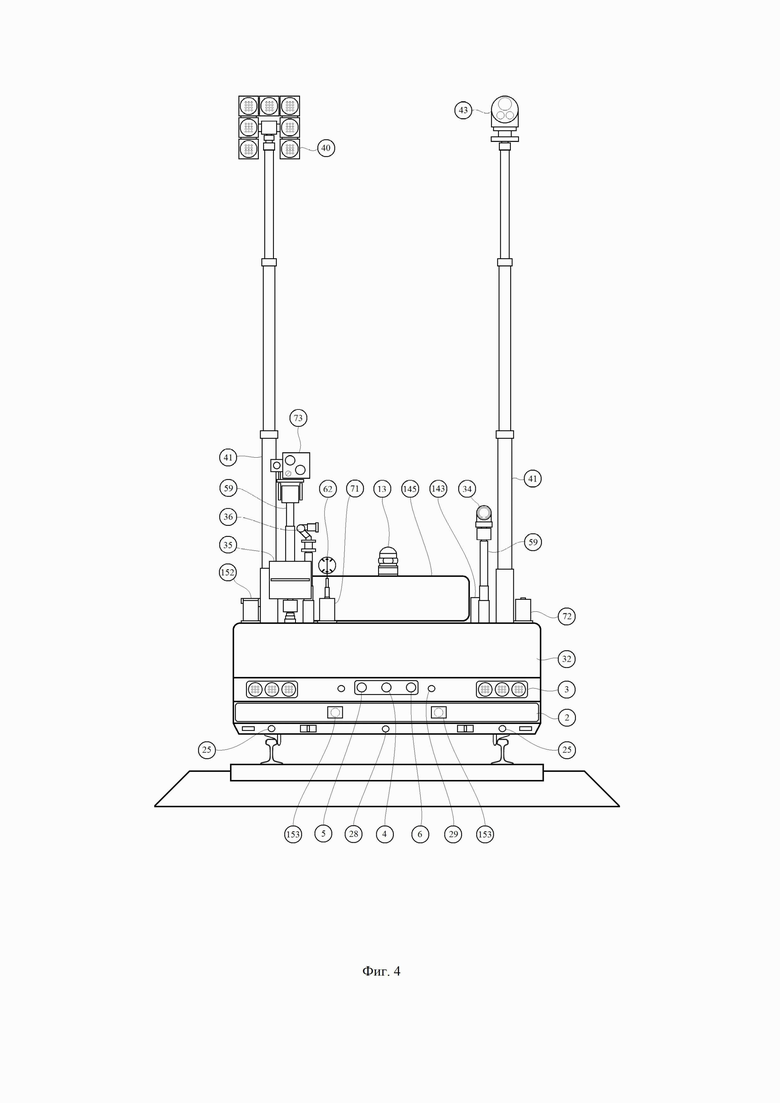
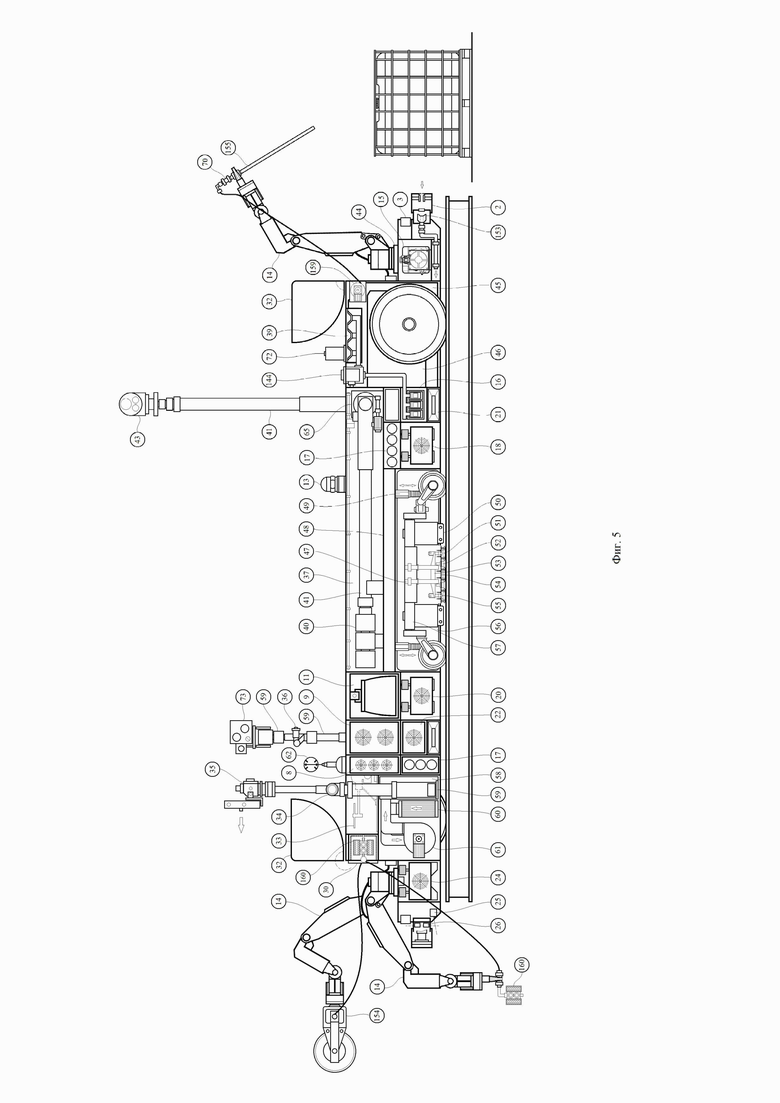
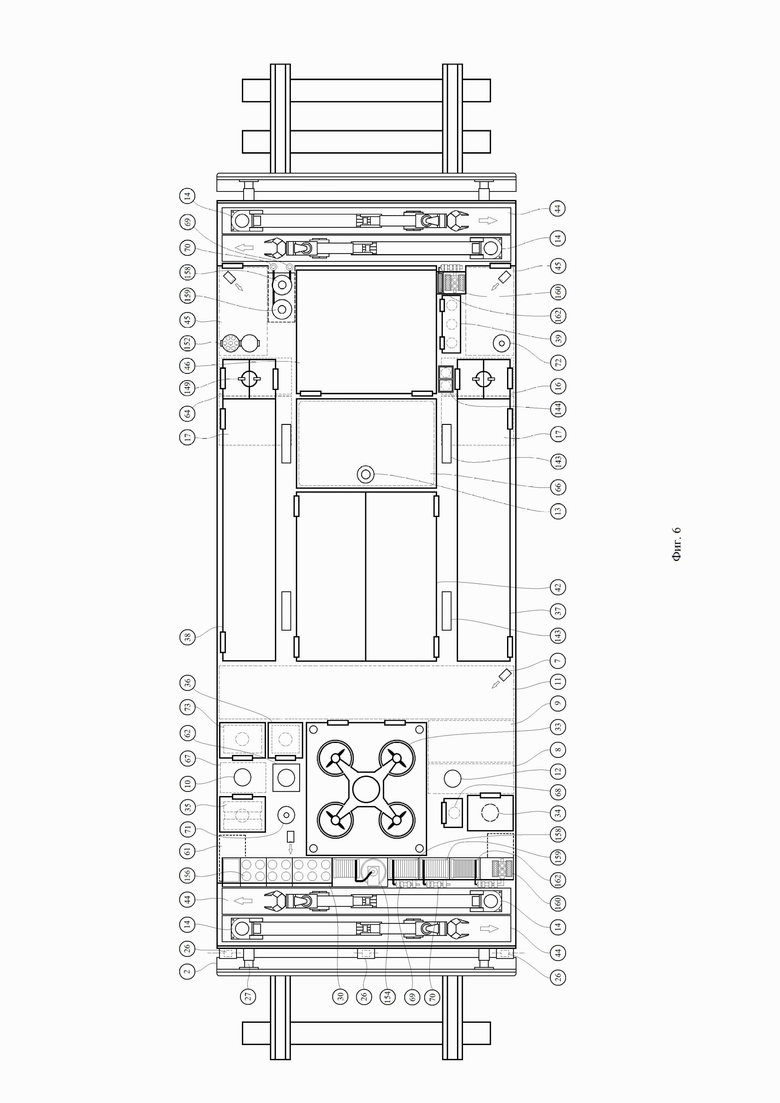

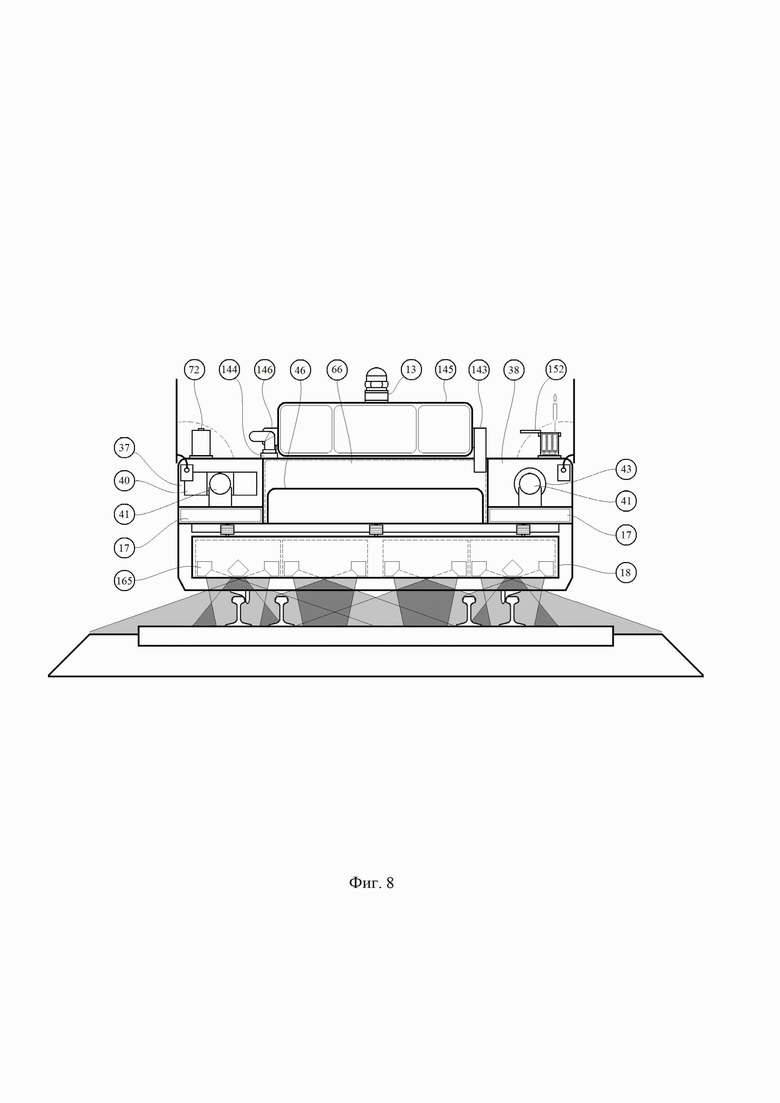
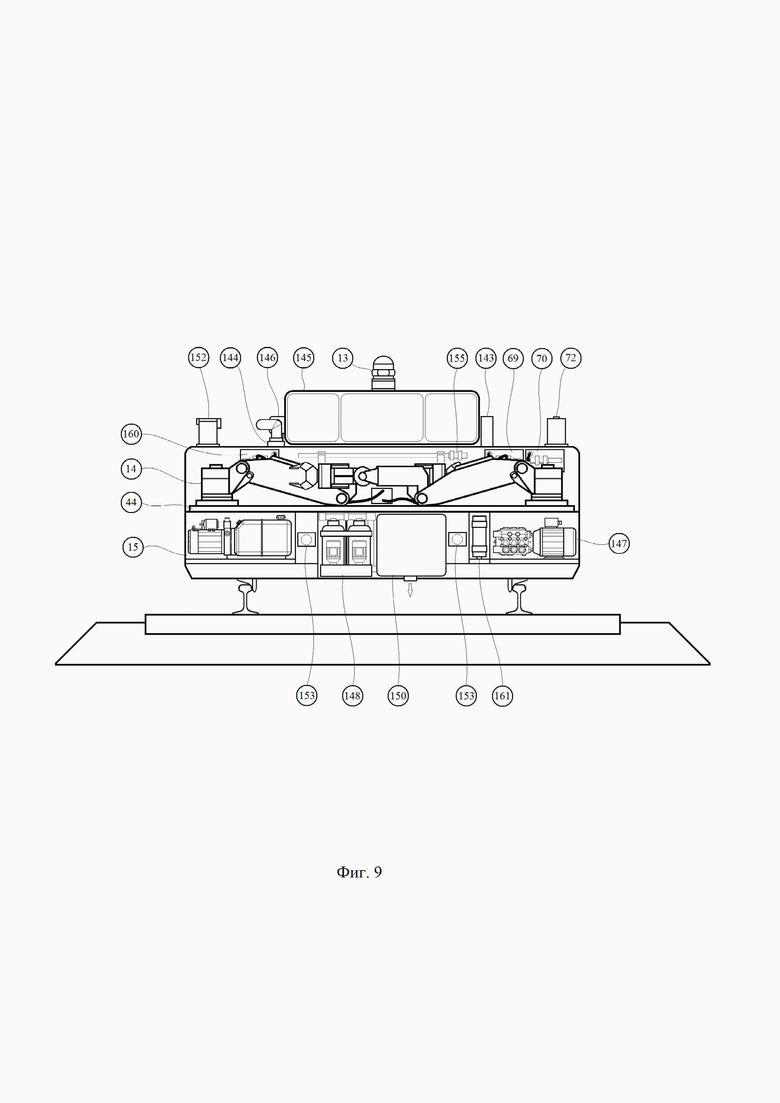
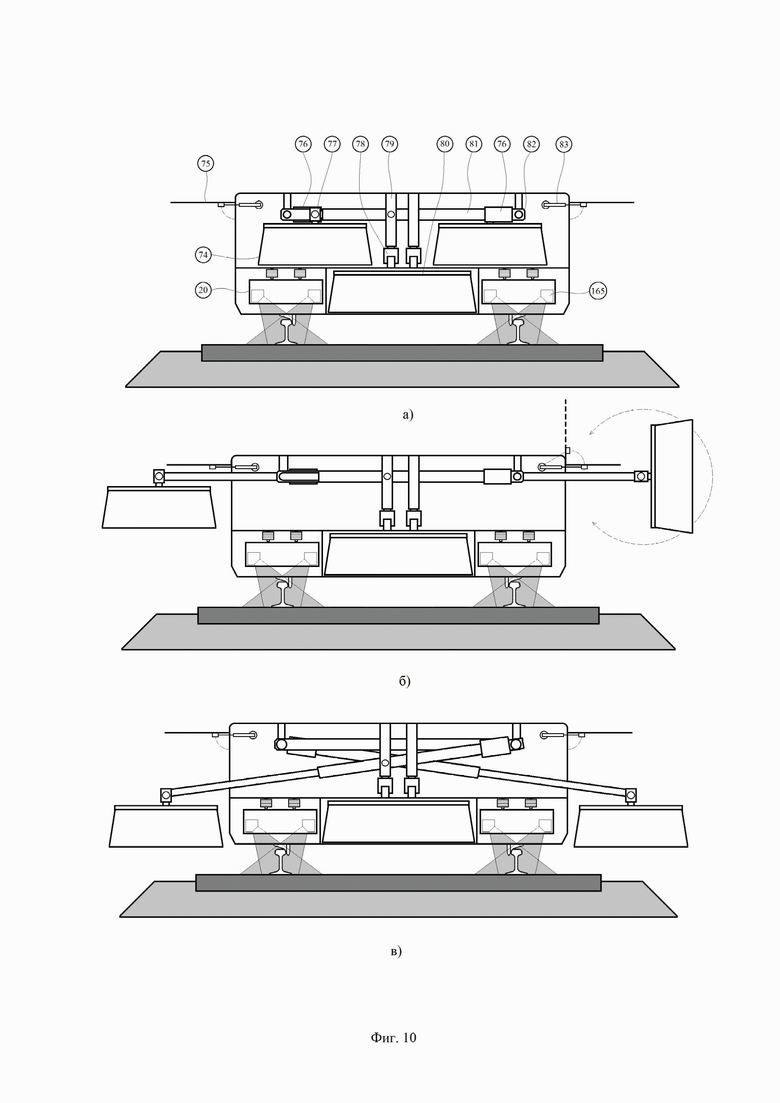
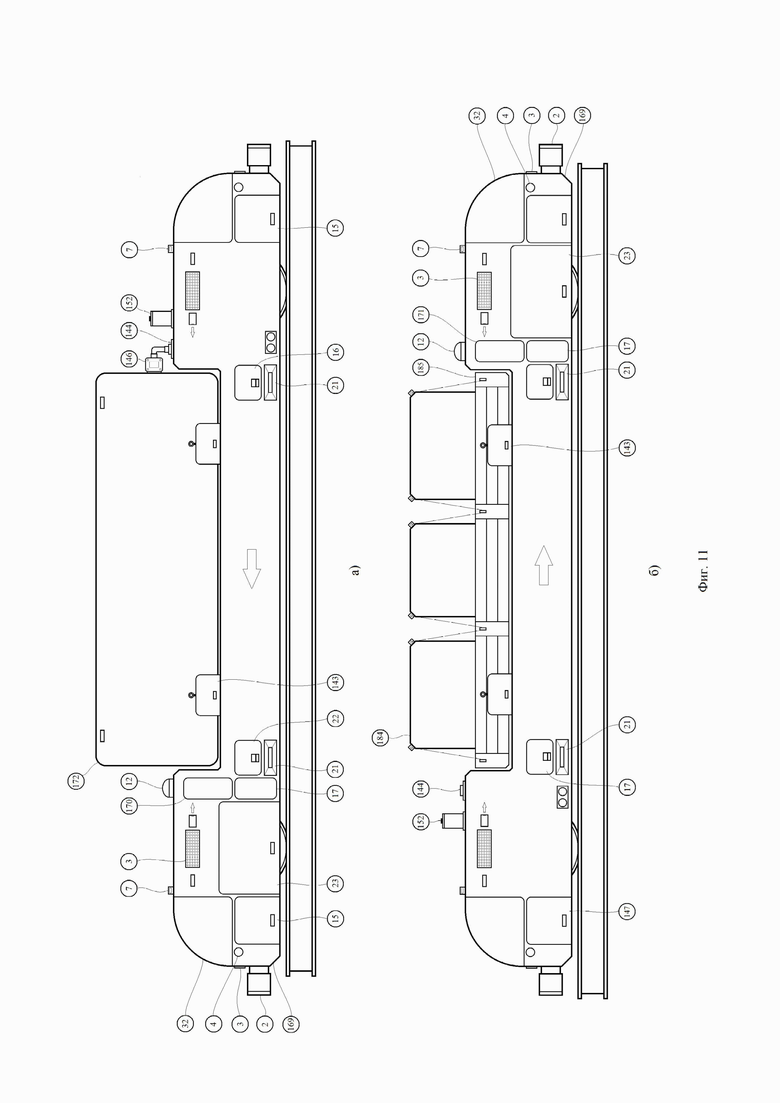
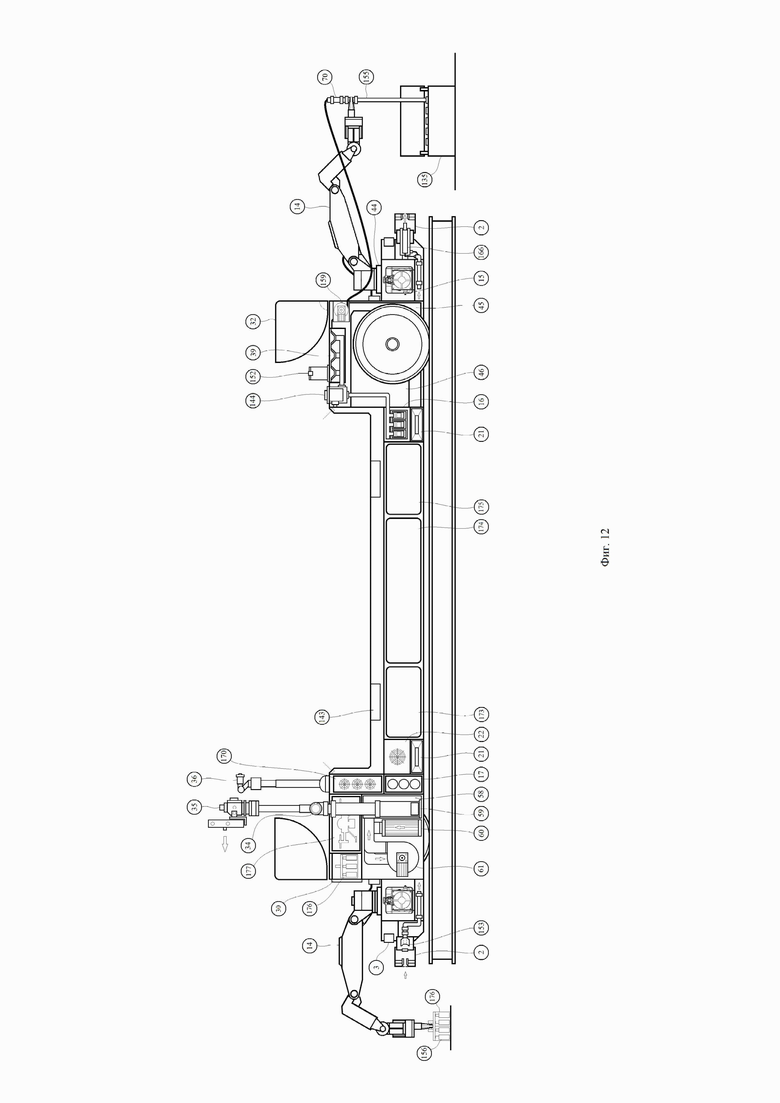
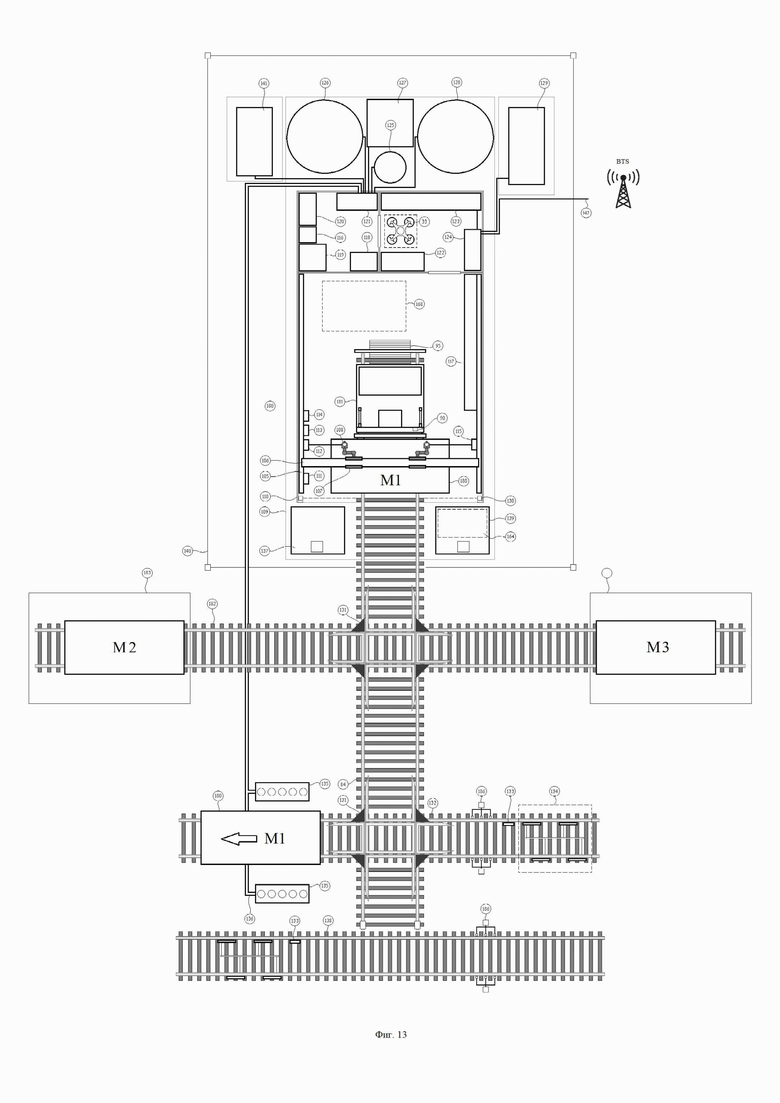
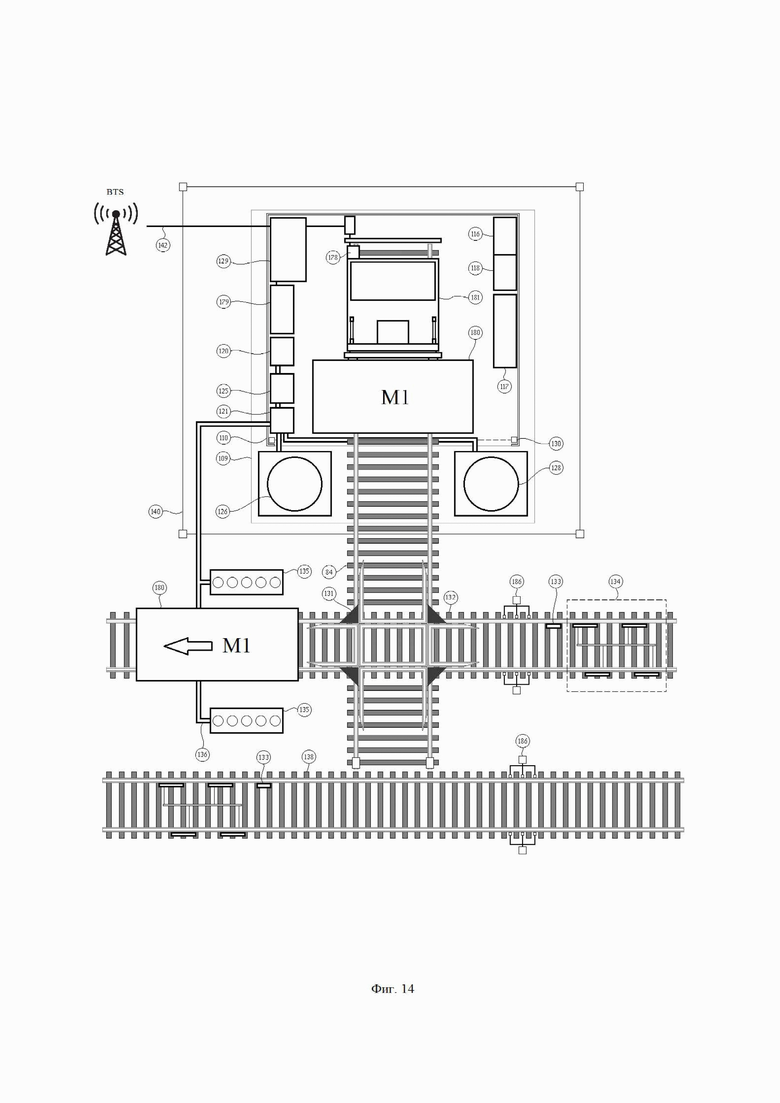
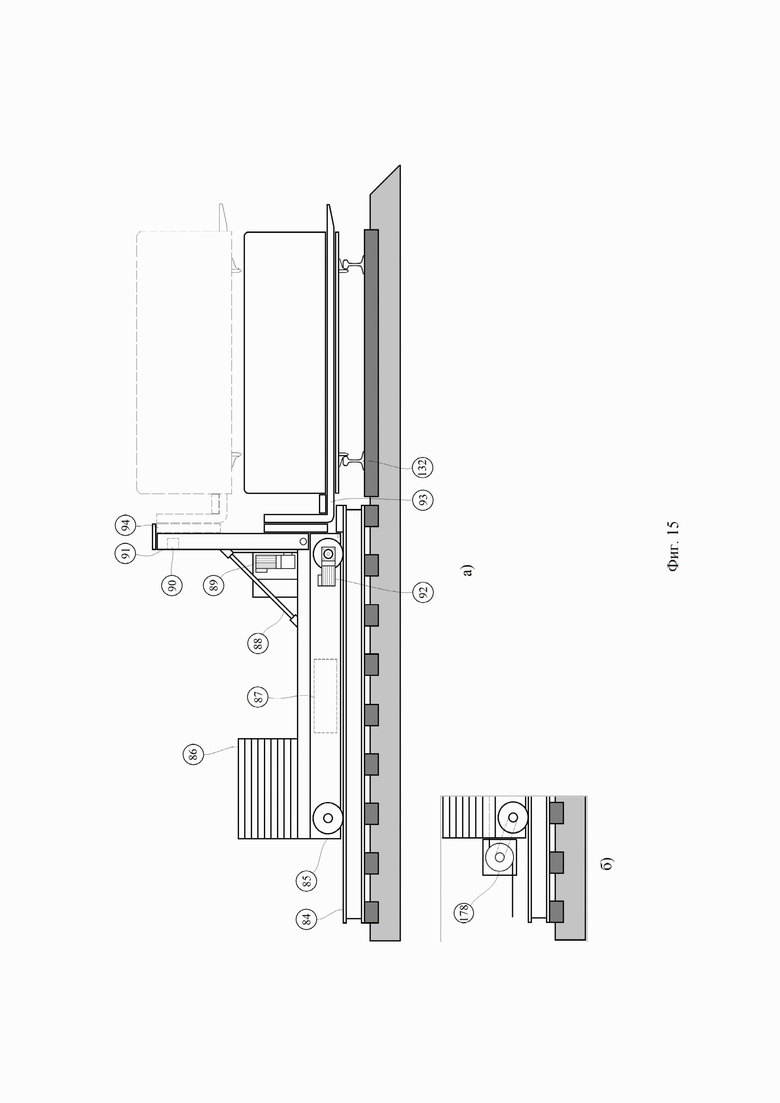
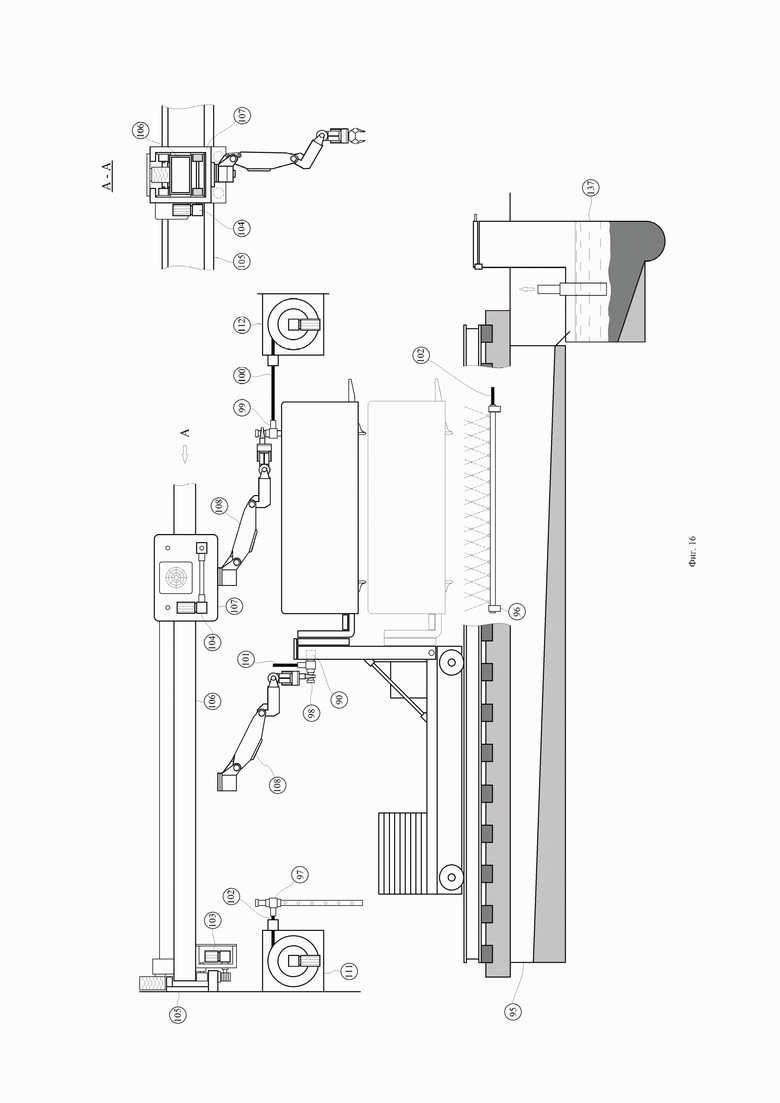

Изобретение относится к средствам диагностики железнодорожной инфраструктуры с применением автоматизированных средств оценки состояния технических объектов, связанных с обеспечением безопасности движения поездов. Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры включает стационарную часть, состоящую из базовой станции и одной и более эвакуационных станций, и мобильные части, выполненные в виде подвижных единиц, представляющих собой рельсовые транспортные средства и обеспечивающих мониторинг железнодорожной инфраструктуры. Стационарная часть оснащена функциональным оборудованием, обеспечивающим автономную работу комплекса, управление подвижными единицами и связь с единой интеллектуальной системой управления и автоматизации производственных процессов на железнодорожном транспорте. Изобретение повышает безопасность и эффективность диагностики железнодорожной инфраструктуры путем создания участков непрерывного контроля. 9 з.п. ф-лы, 17 ил.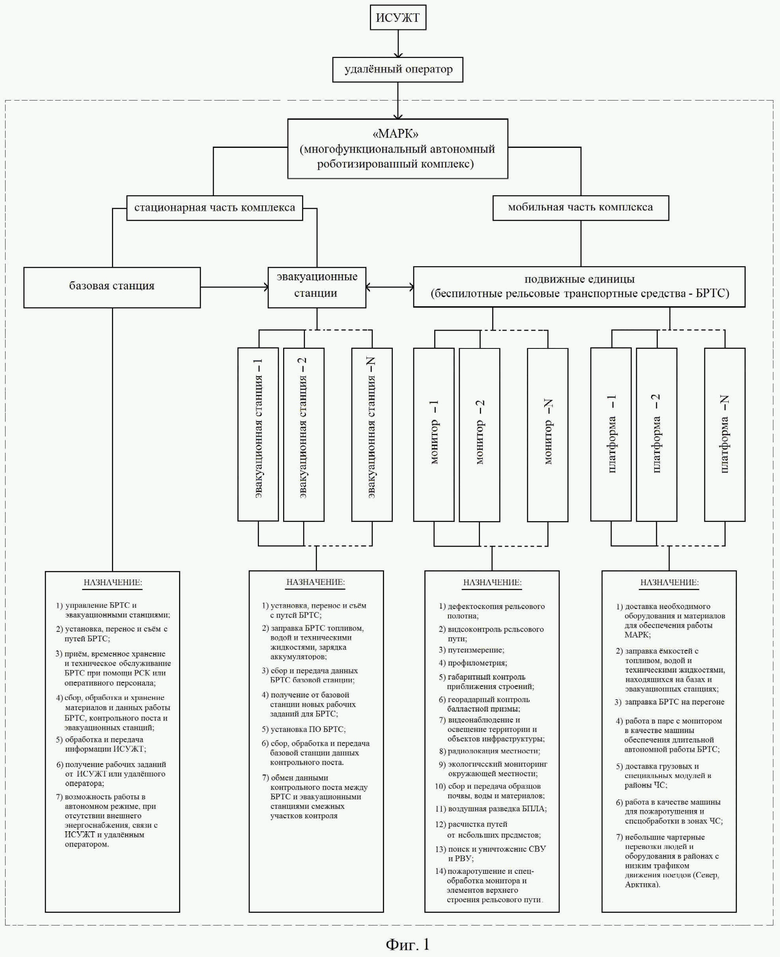
1. Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры, включающий стационарную часть, состоящую из базовой станции и одной и более эвакуационных станций, и мобильные части, выполненные в виде подвижных единиц, представляющих собой рельсовые транспортные средства и обеспечивающих мониторинг железнодорожной инфраструктуры, при этом стационарная часть оснащена функциональным оборудованием, обеспечивающим автономную работу комплекса, управление подвижными единицами и связь с единой интеллектуальной системой управления и автоматизации производственных процессов на железнодорожном транспорте.
2. Комплекс по п. 1, отличающийся тем, что подвижная единица выполнена с возможностью установки или удаления с путей посредством автоматизированных устройств, размещённых в стационарной части комплекса.
3. Комплекс по п. 1, отличающийся тем, что подвижная единица оборудована гибридной дизель-электрической силовой установкой, обеспечивающей движение до уровня установленных скоростей обращения поездов на участках пути, подлежащих контролю.
4. Комплекс по п. 1, отличающийся тем, что гибридная дизель-электрическая силовая установка оснащена блоком литий-титанатных аккумуляторных батарей, обеспечивающим силовой установке электрическую энергию с подзарядкой блока от дизель-генераторной установки.
5. Комплекс по п. 1, отличающийся тем, что подвижные единицы снабжены блоком управления, обеспечивающим их работу в автономном режиме или через прямое управление или через постановку задачи интеллектуальной системе управления подвижными единицами.
6. Комплекс по п. 1, отличающийся тем, что подвижная единица оснащена по крайней мере одним из следующих систем или приборов: бортовым вычислительным и навигационно-связным комплексами, системой габаритного контроля приближения строений, системами визуального, магнитного и ультразвукового контроля рельсового пути, системой сплошного оптического контроля геометрических параметров рельсов и рельсовых пересечений, путеизмерительным и профилометрическим комплексами, системой георадиолокационного контроля балластного слоя и подбалластной зоны, средствами видеонаблюдения и радиолокации местности, комплексом приборов экологического мониторинга, комплексом бортовых манипуляторов, оснащённых видеокамерами, беспилотным летательным аппаратом, роботизированной установкой пожаротушения, грузовыми и специальными модулями различного назначения.
7. Комплекс по п. 1, отличающийся тем, что базовая станция расположена в центре участка, подлежащего контролю.
8. Комплекс по п. 1, отличающийся тем, что эвакуационная станция может быть расположена на всём протяжении участка, подлежащего контролю.
9. Комплекс по п. 1, отличающийся тем, что базовая и эвакуационные станции представляют собой блок-контейнеры, размещаемые в полосе отвода железной дороги и установленные на бетонированных площадках с заглублёнными ёмкостями для воды и топлива.
10. Комплекс по п. 9, отличающийся тем, что базовая и эвакуационные станции оснащены по крайней мере одной из следующих систем или приборов: системами связи и управления комплексом и подвижными единицами, автоматизированными устройствами для их установки и съёма с рельсов, роботизированным сервисным комплексом, включающим зарядку аккумуляторов, заправку дизельным топливом, водой и техническими жидкостями подвижных единиц, а также контрольными постами с системой счёта осей, весовой станцией с бесплатформенными железнодорожными весами и многофункциональным комплексом технических средств для диагностики ходовых частей железнодорожного подвижного состава.
| US 20190136462 A1, 09.05.2019 | |||
| US 6044698 A1, 04.04.2000 | |||
| О | |||
| В | |||
| МОСКВИЧЕВ, ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ И ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ СИСТЕМЫ НА МАГИСТРАЛЬНОМ ТРАНСПОРТЕ, Самара, 2015, СамГУПС, стр.60-64 | |||
| С | |||
| Маргарян и др | |||
| Конвенциональные узкополосные технологические сети обмена данными повышенной надежности и живучести, Технологии и средства связи, |

