Изобретение относится к передвижной рабочей машине, содержащей шасси, а также две передние и две задние опорные консоли, которые установочным концом установлены на неподвижном относительно шасси шарнирном или скользящем соединении, на своем свободном конце удерживают раздвижную опорную ногу, выполненную с возможностью опирания на основание, и выполнены с возможностью поворота из близкого к шасси транспортного положения в опорное положение с изменением базового угла между опорной консолью и шасси и/или с возможностью раздвигания с изменением длины опорной консоли между установочным и свободным концами.
Передвижными рабочими машинами такого рода являются, например, автобетононасосы, содержащие служащий в качестве опоры для подающего трубопровода бетонораспределитель, который своей первой секцией мачты шарнирно соединен с поворотной головкой, поворачиваемой за счет управления приводом вращения вокруг вертикальной оси шасси, причем секции мачты за счет управления соответствующими приводами складывания выполнены с возможностью поворота вокруг горизонтальных осей складывания относительно поворотной головки и каждой соседней секции мачты. В качестве других применений рассматриваются автокраны или передвижные выдвижные лестницы.
Опирающиеся своими опорными ногами на основание опорные консоли задают при приподнятом шасси опорный четырехугольник с четырьмя проходящими между соседними углами кромками опрокидывания, за которые не должен выходить центр тяжести системы. В случае автобетононасоса при полностью выдвинутых и опертых опорных консолях обычно возможен поворот полностью разложенной и горизонтально ориентированной бетонораспределительной мачты на 360° ее поворотной головки без возникновения опасности опрокидывания. Далее, прежде всего на узких стройплощадках, известно, что опорные консоли выдвигаются и опираются только с одной стороны шасси, тогда как с другой стороны они в своем убранном положении опираются на основание. В этом случае возникает ограниченный рабочий диапазон бетонораспределительной мачты в поддерживаемую выдвинутыми опорными консолями сторону.
Кроме того, из DE 102006031257 А1 известен автобетононасос, каждая опорная консоль которого имеет близкое к шасси и по меньшей мере одно удаленное от шасси опорные положения, произвольно выбираемые с образованием определенных конфигураций опоры для четырех опорных консолей. При каждой конфигурации опоры допускаются только такие движения мачты, при которых центр тяжести машины без опасности ошибочного обслуживания движется в пределах опорного четырехугольника, т.е. в пределах кромок опрокидывания. При изменяющейся постановке опорных ног важно знать их положения. Только это позволяет сделать прогноз устойчивости опоры. У всех известных опорных устройств опорные ноги по соображениям безопасности могли позиционироваться только в определенных дискретных положениях. Эти положения выбираются водителем бетононасоса в зависимости от условий на месте работ. При этом недостатком считается то, что промежуточные положения опорного устройства, которые были бы возможны на месте работ, недопустимы.
Исходя из этого, в основе изобретения лежит задача усовершенствования известной рабочей машины описанного выше рода так, чтобы было возможно автоматическое определение положений опорных ножек и тем самым допустимых нагрузочных моментов и чтобы при ее расположении обеспечивалась более широкая возможность позиционирования опорных ножек без ухудшения устойчивости.
Эта задача решается посредством признаков пункта 1 формулы изобретения. Предпочтительные варианты осуществления и модификации изобретения приведены в зависимых пунктах.
Предложенное решение исходит, прежде всего, из той идеи, что автоматическое определение положений опорных ножек возможно с помощью измерительной техники, так что для каждой конфигурации опоры можно определить опорный четырехугольник, за боковые стороны которого не должен заходить центр тяжести системы при движении опорной консоли. Для достижения этого согласно изобретению предусмотрено по три относящихся к каждой опорной консоли передающе-приемных блока для передачи и приема сигналов времени прохождения или сигналов расстояния, из которых первый передающе-приемный блок расположен в неподвижной относительно шасси контрольной точке, расположенной со стороны установочного конца консоли, в непосредственной близости от неподвижного относительно шасси шарнирного или скользящего соединения, второй передающе-приемный блок расположен в неподвижной относительно шасси контрольной точке, расположенной на определенном расстоянии от контрольной точки, расположенной со стороны установочного конца консоли, а третий передающе-приемный блок расположен в неподвижной относительно опорной консоли контрольной точке вблизи ее свободного конца, таким образом, что передаваемые ими сигналы поочередно передаются прямым путем на соседние приемники, причем предусмотрен блок обработки с микропроцессорным управлением, реагирующий на попарно связанные друг с другом передаваемые и принимаемые сигналы передающе-приемных блоков и содержащий программу определения неподвижной относительно опорной консоли контрольной точки или положения опорной ноги в неподвижной относительно шасси системе координат. Три контрольные точки образуют треугольник, который может осуществлять измерение посредством расположенных там передающе-приемных блоков по типу метода триангуляции с определением выбранных с определенной установкой положений опорной ноги. Образованные контрольными точками углы треугольника должны быть свободно противоположны друг другу с тем, чтобы было возможно бесперебойное измерение.
В одном предпочтительном варианте осуществления изобретения предусмотрено, что передающе-приемные блоки содержат соответственно ультразвуковой передатчик и ультразвуковой приемник, которые попарно образуют между контрольными точками используемую в обоих направлениях и за счет этого резервную систему измерения расстояния. При этом расстояние определяется за счет измерения времени прохождения. Известное расстояние между первой и второй контрольными точками, неподвижными относительно шасси, может использоваться в качестве эталона для определения обоих переменных расстояний до неподвижной относительно консоли контрольной точки. Таким образом, одновременно возможна компенсация температуры, которая учитывает зависимость температуры от скорости звука. Бесперебойное измерение обеспечивается за счет того, что зоны действия передающе-приемных блоков перекрываются. Чтобы можно было правильно соотнести между собой передаваемые и принимаемые сигналы трех различных передающе-приемных блоков каждой опорной консоли, предпочтительно, если передаваемые сигналы имеют соответственно идентифицируемое приемниками кодирование.
В принципе, можно также оборудовать передающе-приемные блоки светопередатчиками и светоприемниками, причем светопередатчики могут быть выполнены в виде лазера. Использование радиопередатчиков и радиоприемников в передающе-приемных блоках также возможно.
Особенно предпочтительно изобретение применяется в автобетононасосах. Для этой цели передвижная рабочая машина предпочтительно содержит расположенную на неподвижном относительно шасси основании, служащую в качестве опоры для подающего трубопровода и состоящую по меньшей мере из трех секций складывающуюся мачту, первая секция которой свободным концом шарнирно соединена с поворотной головкой, выполненной с возможностью поворота вокруг вертикальной оси шасси за счет управления поворотным приводом, причем секции мачты за счет управления соответствующими приводами складывания выполнены с возможностью поворота вокруг горизонтальных осей складывания относительно поворотной головки и/или каждой соседней секции мачты.
Ниже изобретение более подробно поясняется на примере его осуществления, схематично изображенном на чертежах, на которых представляют:
- фиг.1а: вид сбоку автобетононасоса с опорными консолями в транспортном положении;
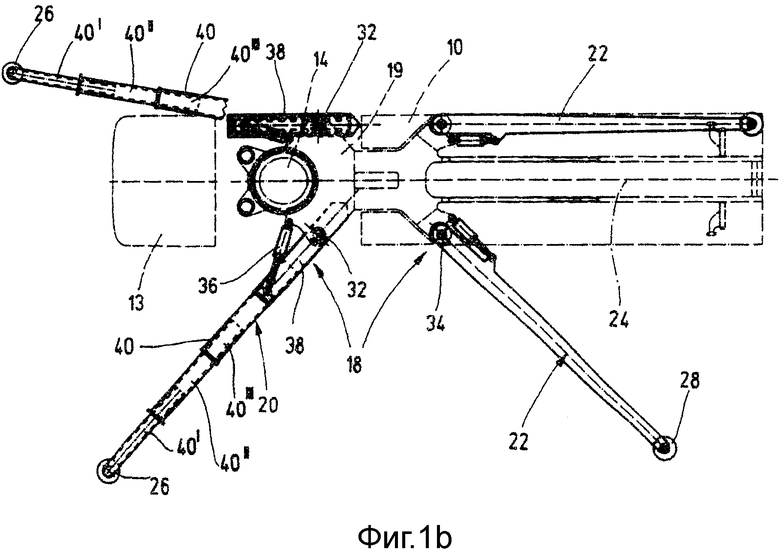
- фиг.1b: вид сверху на автобетононасос из фиг.1а с опорными консолями в различных опорных положениях;
- фиг.2: схему передней опорной консоли с системой измерения положения;
- фиг.3: схему зоны действия передающе-приемных блоков;
- фиг.4: в геометрическом виде пример выполнения согласно фиг.2 для определения положения опорной ноги (объекта) посредством триангуляции.
Изображенный на фиг.1а, 1b автобетононасос состоит в основном из многоосного шасси 10 с двумя передними 11 и тремя задними 12 осями, кабиной 13, бетонораспределительной мачтой 15, установленной с возможностью поворота вокруг вертикальной оси на близком к передней оси поворотном механизме 14, установленном на шасси 10 на расстоянии от поворотного механизма 14 насосным устройством 16 и опорной конструкцией 18 для шасси 10. Опорная конструкция 18 содержит неподвижную относительно шасси несущую раму 19, две передние 20 и две задние 22 опорные консоли, которые в транспортном положении убраны и ориентированы параллельно продольной оси 24 машины, а в опорном положении выступают наискось вперед и назад за шасси 10.
Передние опорные консоли 20 установлены с возможностью поворота вокруг своих вертикальных осей 32 поворота, а задние опорные консоли 22 - с возможностью поворота вокруг своих вертикальных осей 34 поворота между транспортным и опорным положениями под действием соответствующего выдвигающего цилиндра 36. Кроме того, все опорные консоли 20, 22 содержат на своем свободном конце раздвижную опорную ногу 26, 28, с помощью которой они опираются на основание 30, приподнимая шасси 10.
Передние опорные консоли 20 выполнены телескопическими. Каждая из них содержит поворачиваемый вокруг вертикальной оси 32 поворота относительно шасси выдвижной короб 38 и состоящую из трех телескопических сегментов 40', 40'', 40''' телескопическую часть 40. Через выдвижной короб 38 и телескопическую часть 40 проходит телескопический гидроцилиндр (не показан). Как видно на фиг.1b, опорные консоли в зависимости от места на стройплощадке могут опираться на основание своими опорными ногами с образованием различных конфигураций постановки, а также с внутренней, близкой к шасси, и внешней, удаленной от шасси, поддержкой. Особенность изобретения состоит в том, что возможны также любые промежуточные положения между внутренним и внешним опорными положениями. Последнее обеспечивается за счет того, что предусмотрено измерительное устройство, с помощью которого можно автоматически определить положение опорной ноги 26 в неподвижной относительно шасси системе координат.
Измерительная система содержит на каждой опорной консоли три передающе-приемных блока S1/E1, S2/E2/, S3/E3, выполненные для передачи и приема сигналов времени прохождения или сигналов расстояния. Для этой цели предпочтительно используются ультразвуковые передатчики и приемники. Однако, в принципе, можно также использовать свето- или радиопередатчики и приемники. Первый передающе-приемный блок S1/E1 неподвижно расположен на шасси в контрольной точке А, расположенной со стороны установочного конца, в непосредственной близости от неподвижного относительно шасси шарнирного соединения 32. Второй передающе-приемный блок S2/E2 находится в неподвижной относительно шасси контрольной точке В, расположенной на заданном расстоянии L12/21 от контрольной точки В со стороны установочного конца, а третий передающе-приемный блок S3/E3 расположен в неподвижной относительно консоли контрольной точке С вблизи свободного конца опорной консоли 40. Контрольные точки А, В, С, в которых находятся передающе-приемные блоки, расположены на фиг.3 так, что зоны W1, W2, W3 их действия перекрываются, в результате чего передаваемые ими сигналы по очереди и без эха передаются прямым путем к приемникам в других контрольных точках. На фиг.2-4 контрольные точки А, В, С образуют треугольник, длины сторон которого могут быть измерены с помощью передающе-приемных блоков за счет передачи и приема ультразвуковых сигналов в обоих направлениях. Значения длин в зависимости от направления их измерения обозначены L12, L21, L23, L32, L13, L31. Измерение осуществляется в обоих направлениях для достижения резерва и тем самым более высокой надежности результатов измерения. Целью измерительных устройств в различных опорных ногах является определение положения опорной ноги и тем самым объектной точки XC/YC в неподвижной относительно шасси системе x/y координат. С учетом геометрического расположения на фиг.4 координаты XC, YC в объектной точке С вычисляются следующим образом.
Известны длины сторон а, b, с треугольника из измерений пути на фиг.2. Искомыми являются координаты XC/YC в системе x/y координат.
По теореме косинусов справедливо:
Отсюда координаты объектной точки вычисляются следующим образом:

Измеренные значения длин сторон треугольника шкалируются для дальнейшего расчета. При шкалировании сигналов учитывается и оценивается также резерв при измерении длин в обоих направлениях. При этом неизменное относительно шасси расстояние L12/21 используется в качестве эталонного отрезка для компенсации температуры и для определения поправочных коэффициентов для обоих других измерений длин. Расчет положений опорных ног осуществляется тогда с помощью приведенных уравнений.
Резюмируя вышесказанное, можно констатировать следующее. Изобретение относится к передвижной рабочей машине, содержащей шасси 10, а также две передние 20 и две задние 22 опорные консоли. Опорные консоли выполнены с возможностью поворота из близкого к шасси транспортного положения в опорное положение с изменением своего базового угла α между опорной консолью и шасси и/или с возможностью раздвигания с изменением своей длины между установочным и свободным концами. Для автоматического определения положения XC/YC опорной ноги по отношению к шасси 10 предусмотрено по три относящихся к каждой опорной консоли передающе-приемных блока S1/E1, S2/E2/, S3/E3 для передачи и приема сигналов времени прохождения или сигналов расстояния. Кроме того, предусмотрен блок обработки с микропроцессорным управлением, реагирующий на попарно связанные друг с другом передаваемые и принимаемые сигналы передающе-приемных блоков и содержащий программу определения положения опорной ноги в неподвижной относительно шасси системе x/y координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНОЕ РАБОЧЕЕ УСТРОЙСТВО С ОПОРНОЙ КОНСТРУКЦИЕЙ | 2011 |
|
RU2549658C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕНТРА И РАДИУСА ЦИЛИНДРИЧЕСКИХ УЧАСТКОВ ДЕТАЛЕЙ | 2014 |
|
RU2581384C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАЗМЕРНЫХ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2694693C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
| УСТАНОВКА ДЛЯ БУРЕНИЯ СКВАЖИН | 2009 |
|
RU2392409C1 |
| Устройство для регулирования геометрической формы строчки на швейной машине | 1982 |
|
SU1390271A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЙ | 2013 |
|
RU2525629C1 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| УСТРОЙСТВО ТЕСТИРОВАНИЯ И АТТЕСТАЦИИ СПУТНИКОВЫХ GPS-ПРИЕМНИКОВ (УТАСП) | 2012 |
|
RU2497075C1 |
| СТРОИТЕЛЬНАЯ МАШИНА С ВЫЧИСЛИТЕЛЬНЫМ УСТРОЙСТВОМ ДЛЯ ОПРЕДЕЛЕНИЯ ДИАПАЗОНА РЕГУЛИРОВАНИЯ | 2011 |
|
RU2471981C2 |


Изобретение относится к передвижной рабочей машине, содержащей шасси (10), а также две передние и две задние опорные консоли (20, 22). Опорные консоли выполнены с возможностью поворота из близкого к шасси транспортного положения в опорное положение с изменением базового угла (α) между опорной консолью и шасси и/или с возможностью раздвигания с изменением своей длины между установочным и свободным концами. Для автоматического определения положения (XC/YC) опорной ноги относительно шасси (10) предусмотрены по три относящихся к каждой опорной консоли передающе-приемных блока (S1/E1, S2/E2/, S3/Е3) для передачи и приема сигналов времени прохождения или сигналов расстояния. Кроме того, предусмотрен блок обработки с микропроцессорным управлением, реагирующий на попарно связанные друг с другом передаваемые и принимаемые сигналы передающе-приемных блоков и содержащий программу определения положения опорной ноги в неподвижной относительно шасси системе координат. 7 з.п. ф-лы, 4 ил.
1. Передвижная рабочая машина, содержащая шасси (10), а также две передние и две задние опорные консоли (20, 22), которые установочным концом установлены на неподвижном относительно шасси шарнирном или скользящем соединении (32, 34), на своем свободном конце удерживают раздвижную опорную ногу (32), выполненную с возможностью опоры на основание, и выполнены с возможностью поворота из близкого к шасси транспортного положения в опорное положение с изменением базового угла (α) между опорной консолью (20, 22) и шасси (10) и/или с возможностью раздвигания с изменением длины опорной консоли (20) между установочным и свободным концами, отличающаяся тем, что в ней предусмотрено по три относящихся к каждой опорной консоли передающе-приемных блока для передачи и приема сигналов времени прохождения или сигналов расстояния, из которых первый передающе-приемный блок (S1/E1) расположен в неподвижной относительно шасси контрольной точке (А), расположенной со стороны установочного конца, в непосредственной близости от неподвижного относительно шасси шарнирного или скользящего соединения (32), второй передающе-приемный блок (S2/E2) расположен в неподвижной относительно шасси контрольной точке (В), расположенной на заданном расстоянии (L12, L21) от контрольной точки (А), расположенной со стороны установочного конца, а третий передающе-приемный блок (S3/Е3) расположен в неподвижной относительно консоли контрольной точке (С) вблизи свободного конца опорной консоли таким образом, что передаваемые ими сигналы поочередно передаются прямым путем на приемник соседнего передающе-приемного блока, причем предусмотрен блок обработки с микропроцессорным управлением, реагирующий на попарно связанные друг с другом передаваемые и принимаемые сигналы передающе-приемных блоков и содержащий программу определения координат XC/YC неподвижной относительно консоли контрольной точки (С) или положения опорной ноги (26, 28) в неподвижной относительно шасси системе (х/у) координат.
2. Машина по п.1, отличающаяся тем, что передающе-приемные блоки содержат ультразвуковой передатчик и ультразвуковой приемник.
3. Машина по п.1, отличающаяся тем, что передающе-приемные блоки содержат светопередатчик и светоприемник.
4. Машина по п.3, отличающаяся тем, что светопередатчик содержит лазер.
5. Машина по п.1, отличающаяся тем, что соседние друг с другом передающе-приемные блоки имеют перекрывающие друг друга зоны действия.
6. Машина по п.1, отличающаяся тем, что передаваемые передающе-приемными блоками сигналы имеют идентифицируемое приемниками передающе-приемных блоков кодирование.
7. Машина по п.1, отличающаяся тем, что заданное расстояние (L12/L21) между первой неподвижной относительно шасси контрольной точкой (А), расположенной со стороны установочного конца, и второй неподвижной относительно шасси контрольной точкой (В) образует эталонный отрезок для остальных измерений приема.
8. Машина по п.1, отличающаяся тем, что на неподвижном относительно шасси основании расположена служащая в качестве опоры для подающего трубопровода, состоящая по меньшей мере из трех секций складная мачта, которая одним своим концом шарнирно соединена с поворотной головкой (14), установленной с возможностью поворота вокруг вертикальной оси шасси (10).
| ЕР 1925585 А, 28.05.2008 | |||
| DE 29519928 U1, 04.04.1996 | |||
| Устройство для преобразования тепловой энергии в механическую | 1990 |
|
SU1772415A1 |
| US 6202013 В1, 13.03.2001 | |||
| Способ управления положением рабочего органа проходческого комбайна и устройство для его осуществления | 1979 |
|
SU1105126A3 |

