Изобретение относится к области создания координатного поля и может быть использовано для координатного обеспечения в условиях, когда требуется высокая точность определения координат, а состояние существующей инфраструктуры и ее возможности не могут обеспечить надежное выполнение решаемых задач.
Известно, что в соответствии с «Основными положениями концепции создания единой системы Координатно временного и навигационного обеспечения Российской Федерации», КВиНО всех сфер деятельности Государственных органов, хозяйствующих субъектов и граждан является одной из критически важных технологий, определяющих безопасность, обороноспособность и темпы социально экономического развития Российской федерации [1].
Для создания координатно-временного навигационного поля на Земле и в ближнем околоземном пространстве предназначены Глобальные Навигационные Спутниковые Системы (ГНСС). ГНСС основаны на достижениях астрометрии, геодинамики, небесной механики, эфемеридной астрономии, фундаментальной геодезии и картографии, на использовании множества долговременных наблюдательных программ, в которых участвуют десятки стран и многие международные и национальные организации [12].
Технический результат в ГНСС достигается за счет отправки данных и синхронизирующих сигналов движущимися на орбитах Земли спутниками, приема сигналов и определения своего местоположения приемниками в любой точке мира. Прототип.
Сигналы ГНСС включают в себя сигналы дальности, используемые для измерения расстояния до спутника, и навигационные сообщения. Навигационные сообщения включают данные эфемерид, используемые при трилатерации для расчета положения каждого спутника на орбите, а также информацию о времени и состоянии всей группировки спутников, называемую альманахом. Сигналы отправляются с периодичностью 0,001 секунд. За интервал времени между отправками сигналов спутники преодолевают примерно 3,9445784 метра.
По информации, полученной в сигналах, приемники потребителей определяют координаты своего положения.
Базисом концепции КВиНО являются три главных положения:
- интеграция всех комплексов и средств, участвующих в решении задач координатно временного и навигационного обеспечения, в единую систему;
- комплексное использование всех навигационных, а не только спутниковых, технологий;
- создание Единой системы координатного и навигационного обеспечения, как системы предоставления массовых услуг на базе координатно временной и навигационной информации.
Развитие мировых ГНСС идет по пути повышения точности и доступности позиционирования, обеспечения целостности навигационного поля, а также расширения доступных услуг. Сформировалось два направления развития ГНСС:
- модернизация существующих (ГЛОНАСС, GPS) и создание новых глобальных спутниковых навигационных систем (европейский проект ГАЛИЛЕО, китайский проект БЕЙДОУ);
- развитие функциональных дополнений (ФД).
Функциональные дополнения ГНСС предоставляют потребителям информацию, которая позволяет повысить точность и достоверность определения пространственных координат, скорости движения и времени.
Выходная информация ФД доводится до потребителей по специальным каналам связи. Она обычно содержит корректирующую информацию (для устранения или уменьшения погрешностей определения местоположения потребителей) и информацию о целостности ГНСС (для обеспечения достоверности результатов место определения). Главными недостатками ФД является то, что для их использования необходимо создание стационарных сетей высокой плотности, что требует огромных затрат материальных и финансовых ресурсов и отсутствие дополнений, которые при сбоях ГНСС способны обеспечить точность позиционирования соизмеримую с единицами метров и менее.
В условиях существующих и вероятных конфликтов функциональные дополнения, с одной стороны на не подконтрольных территориях не могут гарантировать надежность и безопасность их использования. С другой сети функциональных дополнений, созданные в мирное время на нашей территории, могут быть использованы вероятным противником для повышения точности нанесения ударов по нашим военным и гражданским объектам.
Опыт противостояния с коллективным западом на Украине показал, что ГНСС не может надежно обеспечить выполнение многих задач. С обеих сторон идет поиск решений, которые могли бы нивелировать противодействие противника в целях достижения поставленных целей.
Можно предположить, что направлением таких поисков являются и полеты американских БПЛА и палубных самолетов ДРЛО в районе Крыма. Известны факты многократных полетов американских стратегических разведывательных БЛА RQ-4 Global Hawk вдоль побережья Турции (Крыма) и палубных самолетов ДРЛО E-2C Hawkeye над территорией Болгарии и Румынии в период подготовки и нанесения ударов по нашим объектам. Отдельные фрагменты маршрутов полетов показаны на рисунке Фиг.1. Удаление траекторий полета RQ-4 Global Hawk от Севастополя составляет примерно 170 километров, протяженность траекторий полетов в одну сторону, превышает 500 километров. Общая их протяженность составляет примерно 5000 км.
Полеты самолетов ДРЛО E-2C Hawkeye имеют протяженность траекторий в одну сторону, превышающую двести километров. Можно предположить, что эти летательные аппараты (ЛА) выполняют не только разведывательные, но и задачи дублирования существующего координатно временного поля подверженного воздействию наших средств РЭБ. Подтверждением тому могут служить протяженные прямолинейные траектории движения указанных ЛА, которые могут формировать базовые точки для отправки сигналов.
Эти летательные аппараты, получая точные координаты своего текущего положения от наземных станций способны синхронно отправлять навигационные сигналы, содержащие координаты и время отправки.
Подобные сигналы могут принимать и использовать для точного наведения на наши важные объекты современные средства поражения противника.
Известно, что японская телекоммуникационная компания High Altitude Platform Station 21-22 сентября 2020 года, провела испытания перспективного долго летающего стратосферного беспилотного летательного аппарата Sunglider, полетом на высоте 19,2 тысячи метров в течение 20 часов [14]. При размахе крыла 78 метров, Sunglider оснащён 10-ю электрическими двигателями и солнечными батареями, благодаря чему он может летать в течение нескольких месяцев, днём и ночью, с крейсерской скоростью 110 км/ч. Проект Sunglider предусматривает создание сети мобильного интернета на дальности 700 километров на скорости до 1 гигабита в секунду. Во время полёта была продемонстрирована бесперебойная связь LTE формата. Данный факт подтверждает то, что с помощью высотных летательных аппаратов могут быть реализованы связь, интернет и передача навигационных сигналов. Использование подобных технологий может позволить обеспечить реализацию рассматриваемой в изобретении задачи в течение длительного периода времени без использования дорогостоящих спутников Земли.
Целью изобретения является разработка надежных способов, которые в соответствии с концепцией создания единой системы КВиНО РФ позволили бы решать задачи высокоточного координатного обеспечения для эффективного поражения целей с удаленных позиций боеприпасами в обычном снаряжении, в том числе на не подконтрольных нам территориях в условиях сбоев ГЛОНАСС.
При реализации предлагаемого способа используют государственные атомные стандарты времени и частоты наземного и космического базирования, комплекс средств формирования и поддержания национальной шкалы времени, в том числе эталонные средства Министерства Обороны России. Перед его реализацией проводят сличение шкал времени всех часов, способами, изложенными в [7].
Для простоты изложения текста, приняты допущения:
Под воздушными объектами понимают любые летательные аппараты (ЛА).
Под специальной аппаратурой, предназначенной для точного определения расстояний между точками отправки и приема сигналов, понимают аппаратуру, включающую многодиапазонные УКВ приемопередатчики с устройствами формирования, кодирования, декодирования, отправки и приема сигналов, малогабаритные атомные часы с устройствами задания и фиксации времени отправки и поступления сигналов, навигационные антенны, высотомеры, вычислительные устройства, устройства памяти, источники электропитания, модули сопряжения с ГНСС приемниками, системами управления БПЛА, наземными комплексами управления. Конкретный состав аппаратуры устанавливаемой на объекты определяется объемом решаемых ими задач.
Под малогабаритными атомными часами (МАЧ) понимают часы с характеристиками не ниже часов построенных на основе сверхминиатюрного квантового рубидиевого стандарта частоты НАП-КПН имеющего долговременную нестабильность (за 1 сутки) 5 E -12 [13]. Под навигационными антеннами понимают антенны, через которые осуществляется прием и передача навигационных сигналов.
Указанную специальную аппаратуру устанавливают на наземных пунктах наблюдения (ПН) и наземных и воздушных объектах, которые называют соответственно: наземными навигационными станциями (ННС) и воздушными навигационными станциями (ВНС).
Под навигационными сигналами понимают сигналы, содержащие идентификационные данные, координаты точек отправки и время отправки. Дальномерные сигналы в отличие от навигационных не содержат координат.
Под идентификационными данными понимают номера отправителей и потребителей сигналов и номера сигналов.
Под временем отправки (приема) сигналов, понимают время заданное (зафиксированное) аппаратурой, в которое были проведены их отправка или прием.
Под временем движения сигналов между точками их отправки и приема понимают разницу времени поступления сигналов зафиксированного по часам в точках приема и времени отправки содержащегося в сообщениях.
Расстояния вычисляют как произведение времени движения сигналов и скорости распространения радиоволн.
Под определением координат понимают их вычисление по координатам точек с известными координатами и расстояниям до них.
Важно отметить, что даже современные высокостабильные кварцевые генераторы через 10 суток непрерывной работы могут обеспечить среднесуточную точность часов 5,0E-10.
Учитывая то, что для определения расстояний на дальности до 800 километров с ошибками, не превышающими 1 сантиметр, достаточно точности часов 1,0E-08, можно предположить, что в некоторых случаях, для решения рассматриваемых в изобретении задач, вместо МАЧ, могут быть применены часы, построенные на основе высокостабильных кварцевых генераторов.
Технический результат в предлагаемом способе достигают за счет периодической синхронной отправки объектами помехоустойчивых кодированных навигационных сигналов содержащих специальные метки, идентификационные данные, время отправки и координаты положения их антенн.
Навигационные сигналы отправляют наземные и воздушные навигационные станции.
Навигационные сигналы, отправляемые наземными станциями, содержат идентификационные данные и время отправки. В целях безопасности каждая наземная станция имеет несколько резервных антенн, удаленных от станций на расстояния превышающие радиусы их поражения боеприпасами в обычном снаряжении. Координаты наземных точек отправки сигналов при этом способе потребители выбирают из закрытого сегмента по идентификационным данным. Глубина навигационного поля зависит от мощностей передатчиков навигационных сигналов, высот передающих антенн и высот антенн потребителей.
При высотах полета потребителей превышающих 5000 метров глубина навигационного поля создаваемого наземными навигационными станциями превышает 250 километров.
Координатное поле на неподконтрольных территориях на большую глубину создают синхронной отправкой с заданной периодичностью навигационных сигналов воздушными навигационными станциями. При высотах полета ВНС 20000 метров глубина навигационного поля для наземных потребителей составляет 500 км. Глубина навигационного поля для воздушных потребителей находящихся на высоте 7000 м в этих условиях превышает 800 километров. Воздушные навигационные станции движутся параллельно линии соприкосновения с противником по прямолинейным траекториям, находящимся вне досягаемости его средств ПВО, на взаимных удалениях превышающих 50 километров.
Прямолинейные траектории позволяют вычислять координаты точек отправки очередных навигационных сигналов, контролировать их точность после отправки и вводить необходимые корректуры.
Прямолинейность траекторий обеспечивают заданием постоянных курса, скорости и высот полета летательных аппаратов. Постоянный курс обеспечивают с использованием высокоточных Бесплатформенных инерциальных навигационных систем подобных БИНС-СП-2М, вычислениями и корректировкой координат, курса и скорости в полете.
В качестве воздушных навигационных станции в предлагаемом способе могут быть использованы любые летательные аппараты, имеющие необходимые параметры траектории полета и характеристики позволяющие разместить и обеспечить энергоснабжение указанной специальной аппаратуры.
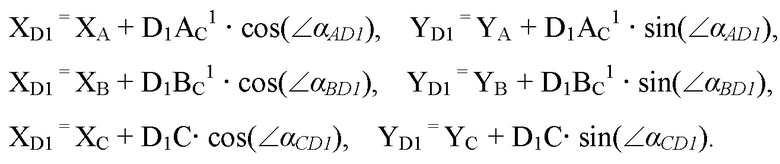
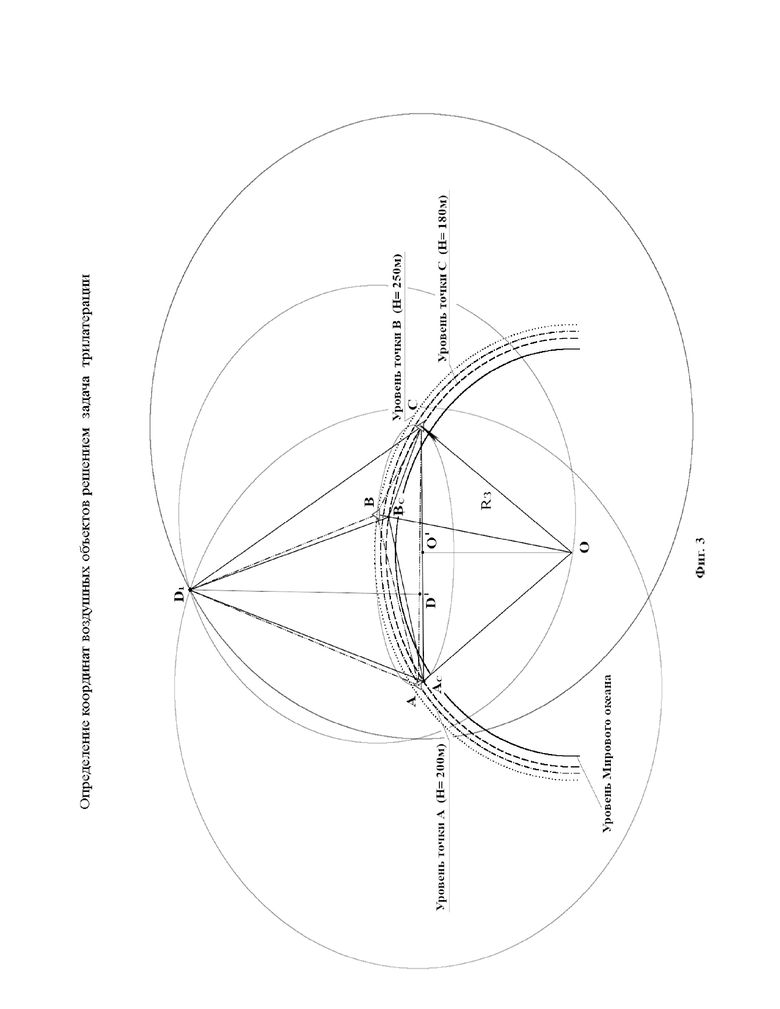
Порядок определения координат точек отправки сигналов при создании координатного поля рассматривают на примере самолетов М-55 "Геофизика" имеющих высоту полета превышающую 20000 метров. Принцип определения координат точек отправки сигналов D1,D2,D3,F1,F2,F3,G1,G2 и G3 показан на рисунках Фиг. 2 и Фиг.3 . В точках A,B,C,K,L,N изображены антенны пунктов наблюдения оборудованных указанной специальной аппаратурой.
При выборе положения ПН. обеспечивают их взаимное удаление и удаление от траекторий полета ЛА сопоставимое с их высотой полета. Координаты антенн пунктов наблюдения определяют с максимально возможной точностью.
Первоначально, летательные аппараты, совершая полет при заданных высоте, курсе и скорости с установленной периодичностью отправляют сигналы, содержащие идентификационные данные и время.
Наземные пункты принимают сигналы, по своим часам фиксируют время их поступления, вычисляют время движения сигналов и расстояния между антеннами ЛА и ПН. По вычисленным расстояниям и координатам антенн ПН вычисляют координаты точек отправки сигналов. После приема нескольких сигналов аппаратура ПН, по координатам предшествующих точек методом экстраполяции определяет координаты очередных точек отправки сигналов, формирует и передает навигационные сигналы на ЛА, содержащие идентификационные данные, заданное время отправки и определенные координаты очередных точек отправки.
Аппаратура ЛА принимает и в намеченное время по бортовым атомным часам отправляет навигационные сигналы.
Пункты наблюдения принимают сигналы, вычисляют координаты точек их отправки, отклонения от координат определенных в результате экстраполяции и учитывают их в дальнейших вычислениях координат очередных точек отправки навигационных сигналов.
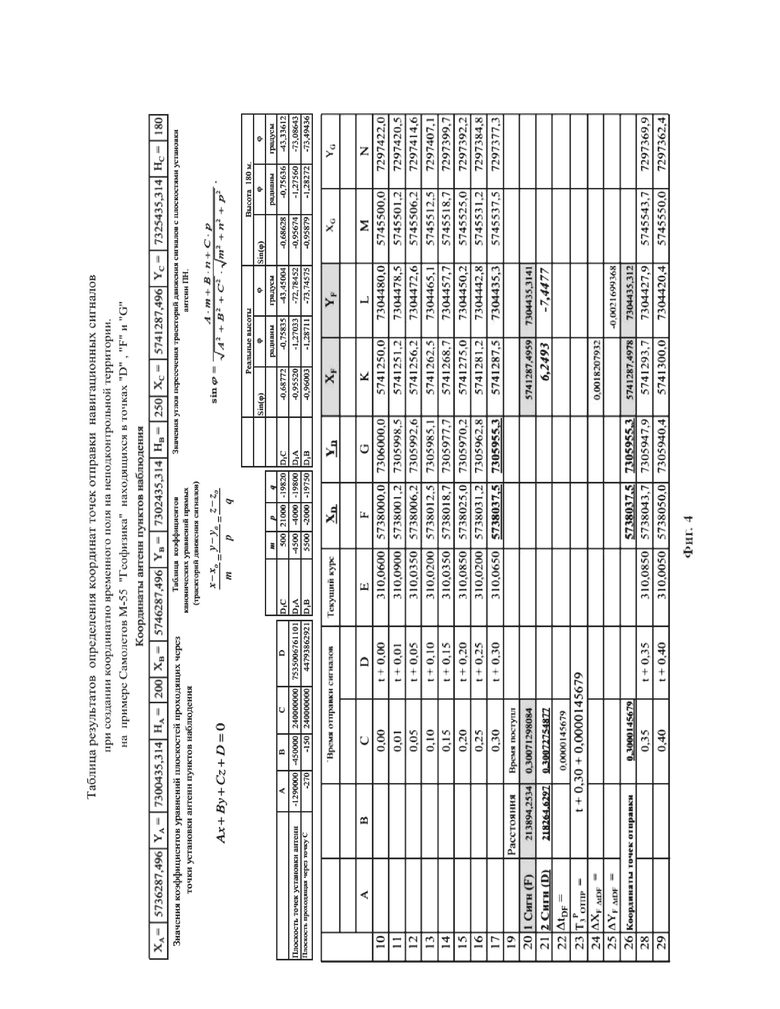
Результаты фиксации времени отправки и приема сигналов, вычислений координат, курса и ошибок сохраняют в закрытом сегменте передачи данных (ЗСПД) в таблицах. Вариант таблицы показан на Фиг.4. При необходимости, для уменьшения нагрузки на каналы связи, по которым передают дальномерные и навигационные сигналы, для обмена информацией с закрытым сегментом передачи данных предусматривают отдельные каналы связи. Доступ к ЗСПД потребителей определяется соответствующими регламентами.
При реализации способа, отправленные сигналы принимают все пункты наблюдения, имеющие необходимую аппаратуру из которых выбирают не менее трех оптимальных для вычислений.
Определения координат рассматривают на примере пирамиды с вершиной в точке отправки навигационных сигналов (D1) и основанием в точках их приема – точки А, В и С, рисунок Фиг. 3.
В качестве исходных данных для вычислений в рассматриваемом примере принимают: дирекционный угол курса ЛА α курса=310°, высоту полета - 20000 м, скорость 700 км/час, интервал отправки сигналов 0,05 секунд, координаты антенн пунктов наблюдения А(XA,YA,HA), В(XB,YB,HB) и С(XC,YC,HC).
1. Для определения искомых координат, вычисляют, длины сторон треугольника (АВС):
АВ = sqrt ((XB-XA)2 +(YB –YA)2+(HB –HA)2),
ВС = sqrt ((XC-XB)2 +(YC –YB)2+(HC –HB)2),
AC = sqrt ((XC-XA)2 +(YC –YA)2+(HC–HA)2).
2. Вычисляют, проекции сторон треугольника на горизонтальную плоскость, проходящую через точку С:
АCВC= sqrt ((XB-XA)2 +(YB –YA)2),
ВCС = sqrt ((XС-XB)2 +(YC –YB)2),
AC = sqrt ((XC-XA)2 +(YC –YA)2).
3. После получения сигналов, содержащих идентификационные данные и время отправки, вычисляют время движения сигналов и расстояния D1А, D1В и D1С.
Порядок вычисления координат точек отправки сигналов решением задачи трилатерации.
4. При решении задачи рассматривают три сферы:
сферу 1 с радиусом RA= D1A c центром в точке A(XA,YA,HA),
сферу 2 с радиусом RB= D1B c центром в точке B(XB,YB,HB),
сферу 3 с радиусом RC= D1C c центром в точке C(XC,YC,HC).
5. Уравнения сфер описанных из точек установки антенн (A,B,C), радиусами равными расстояниям между точками отправки и приема сигналов имеют вид:
(X-XA)2 +(Y –YA)2+(H –HA)2= (D1А)2,
(X-XB)2 +(Y –YB)2+(H –HB)2= (D1В)2,
(X-XC)2 +(Y –YC)2+(H–HC)2 = (D1С)2.
6. Рассматривают уравнения:
- уравнение плоскости, в которой лежит окружность, образованная пересечением сфер 1 и 2:
(XB-XA)⋅X+ (YB-YA)⋅Y+(HB-HA)⋅H=1/2⋅(XB2-XA2+YB2-YA2+HB2-RA2-RB2)
- уравнение плоскости, в которой лежит окружность, образованная пересечением сфер 1 и 3:
(XC-XA)⋅X+ (YC-YA) ⋅Y+(HC-HA)⋅H=1/2⋅(XC2-XA2+YC2-YA2+HC2-RA2-RC2)
- уравнение плоскости треугольника, образованного центрами сфер:
((YC-YA)⋅(HB-HA)-(YB-YA)⋅(HC-HA))⋅(X-XA)+((HC-HA)⋅(XB-XA)-(HB-HA)⋅(XC-XA))⋅(Y-YA)+((XC-XA)⋅(YB-YA)-(XB-XA)⋅(YC-YA))⋅(H-HA)=0.
7. Пересечение двух первых плоскостей дает прямую, перпендикулярную последней плоскости. Пересечение этой прямой с плоскостью треугольника - перпендикуляр из искомой точки пересечения сфер на плоскость треугольника, образованного центрами сфер. Эта точка пересечения принадлежит всем трем плоскостям, и ее координаты являются решением системы трех линейных алгебраических уравнений, приведенных выше. Решив эту систему, получают координаты точки D'(XD',YD',HD').
8. Координаты точки пересечения трех сфер (координаты точки отправки сигнала) определяют по формулам:
XD1=XD ' +k ⋅ ((YC-YA) ⋅ (XB-XA)-(YB-YA) ⋅ (HC-HA)),
YD1=YD ' +k ⋅ ((HC-HA) ⋅ (XB-XA)-(HB-HA) ⋅ (XC-XA)),
HD1=HD ' +k ⋅ ((XC-XA) ⋅ (YB-YA)-(XB-XA) ⋅ (YC-YA)),
k = ± sqrt (RA2- | D'OA|2)/ (2 ⋅ SABC).
Расчеты координат, проведенные по формулам трилатерации с помощью онлайн калькулятора [16] показали отличия от исходных данных не превышающие тысячных долей миллиметров.
Учитывая то, что в результате решения задачи трилатерации получают, как правило, два решения, для выбора варианта решения вычисляют координаты точки отправки навигационного сигнала с использованием теоремы косинусов:
9. По формулам аналитической геометрии определяют параметры уравнений плоскости (A,B,C), проходящей через точки установки антенн ПН (A,B,C) и горизонтальной плоскости проходящей через точку С (AC,BC,C).

10. По координатам точек отправки и приема сигналов рассчитывают коэффициенты канонических уравнений прямых проходящих через эти точки.

11. Вычисляют значения синусов углов наклона траекторий движения сигналов к плоскостям (A,B,C) и (AC,BC,C) по формуле:

Вычисляют углы

Результаты вычислений параметров уравнений плоскости, коэффициентов канонических уравнений прямых и углов пересечения траекторий движения сигналов с плоскостями установки антенн приведены в таблицах Фиг. 4.
12. По формуле Александрова Г.М. [15] рассчитывают координаты центра окружности O1 образованной в результате пересечения плоскости (CACBC) с поверхностью Земли, рисунок Фиг. 3.
 .
.
13. По координатам центра окружности O1 и координатам точек AC, BC,C определяют радиус окружности RO1

Средняя разница вычислений радиуса составляет 8,03116988E-05 м, что доказывает очень высокую точность формулы Александрова Г.М.
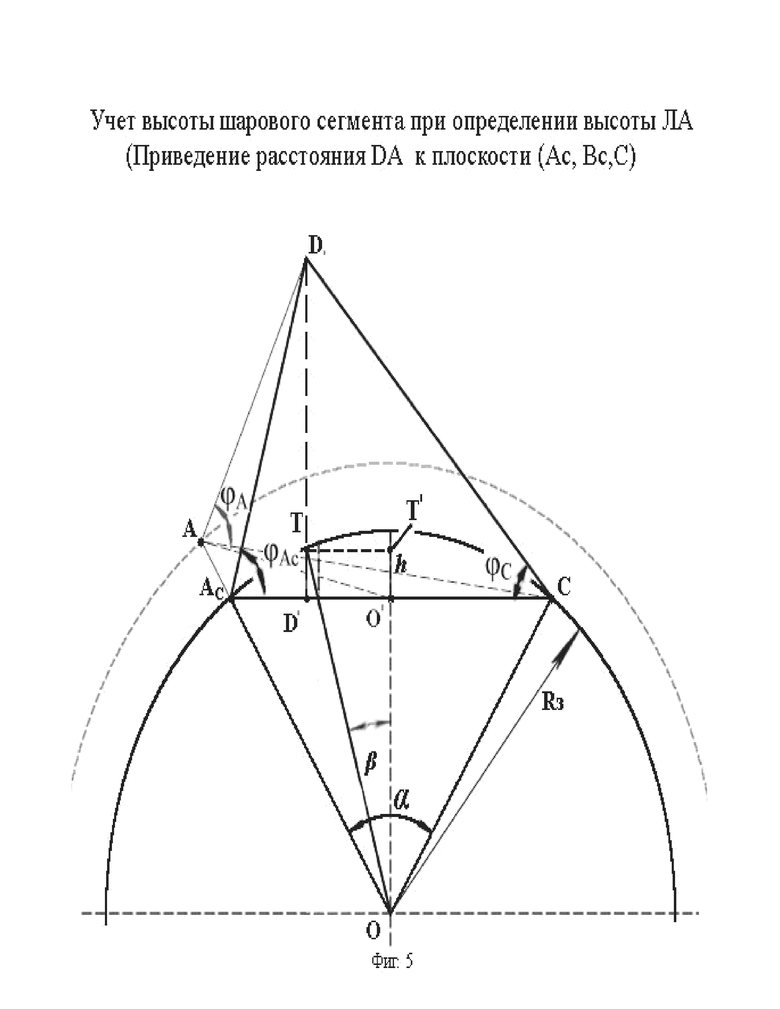
14. Рассчитывают углы между плоскостью горизонта и радиусами Земли в точках AC, BC и C, необходимые для приведения расстояний между точками отправки и приема сигналов к плоскости (AC, BC,C) рисунок Фиг. 5.

Расчеты показали, что углы между линиями исходящими из центра Земли и плоскостями (CAB) и (CACBC) в точках установки антенн пунктов наблюдения, отличаются на доли секунд, что дает основание приравнять их значения.
 .
.
15. С использованием теоремы косинусов, приводят расстояния D1A и D1B к горизонтальной плоскости (CACBC):

16. Определяют высоту точки отправки навигационного сигнала измеренную от горизонтальной плоскости (CACBC).

Вычисляют проекции приведенных расстояний на плоскость (CACBC):
 .
.
17. Вычисляют дирекционные углы из точек A,B и C на точку D1.
18. Вычисляют координаты точки отправки сигнала (D1)
Разница координат, определенных вторым способом для значений принятых в качестве исходных не превышает десятков сантиметров.
19. Для приведения рассчитанной высоты точки отправки сигнала D1D1 к уровню моря определяют высоту шарового сегмента образовавшегося в результате пересечения поверхности Земли с горизонтальной плоскостью (CACBC) воспользуемся рисунком Фиг. 5.
На рисунке показаны:
- сектор OATC имеющий угол α,
- сегмент ATC этого сектора,
- точка T пересечения вертикальной линии проходящей через точку отправки сигнала D1 с поверхностью Земли,
- точка D1 пересечения вертикальной линии с плоскостью (CACBC),
- угол β между вертикалью и радиусом, проходящим через точку T,
- отрезок TD1 – искомая поправка на учет высоты шарового сегмента.
Высоту сегмента определяют по формуле h= Rз ∙ (1-cos(α/2)).
Вычисляют отрезок
D1O1 = sqrt ((XD1- XO1)2 + (YD1- YO1)2),
Вычисляют
cos ( β ) = D1O1 / Rз,
Тогда
TD1= OT1 – (RЗ – h) = RЗ ∙ cos ( β ) - ( RЗ – h ).
20. С помощью Программного Изделия ГИС «ОПЕРАТОР» для силовых структур [11] определяют высоту точки земной поверхности D1 с координатами (XD1, YD1) - HD1.
Определяют высоту точки отправки сигнала над уровнем моря HD1 = HD1 + D1D1 - TD1.
Сравнивают вычисленные координаты с координатами определенными по формулам трилатерации, принимают решение по окончательным значениям.
Таким образом, в результате проведенных вычислений определены геодезические координаты точки отправки сигнала D1 (XD1, YD1, HD1).
Аналогичным образом определяют координаты положения ЛА в остальных точках.
Вычисление координат очередных точек отправки навигационных сигналов методом экстраполяции:
21. Определив координаты положения антенн ЛА в двух предшествующих точках отправки сигналов (точках D1 и D2), Рисунок Фиг.2, определяют приращения координат
∆ XD2 = XD2 - XD1, ∆ YD2 = YD2 - YD1, ∆ HD2 = HD2 - HD1.
22. Учитывая принятые допущения о равномерности прямолинейного движения ЛА, считают, что на следующем участке приращения координат будут равны предшествующим Δ XD3 = Δ XD2, Δ YD3 = ΔYD2, Δ HD3 = Δ HD2.
Вычисляют координаты очередной точки отправки сигнала D3
XD3 = XD2 + Δ XD3 , YD3 = YD2 + Δ YD3, HD3 = HD2 + Δ HD3.
Аналогичным образом рассчитывают координаты точек отправки очередных навигационных сигналов F3 и G3.
Определение координат положения потребителями:
23. Наземные потребители принимают сигналы, определяют время их движения и расстояния, по расстояниям и координатам точек отправки, содержащимся в навигационных сигналах, определяют свои координаты.
24. Воздушные потребители в момент получения навигационных сигналов фиксируют время их поступления и координаты своего положения определенные бортовой навигационной аппаратурой. Определяют время движения сигналов и расстояния. По координатам точек отправки, содержащимся в навигационных сигналах, и расстояниям вычисляют свои координаты. Сравнивают рассчитанные и зафиксированные навигационной аппаратурой координаты. Определяют и вводят в свою бортовую навигационную аппаратуру необходимые корректуры.
25. Результаты отправки, приема сигналов и вычислений координат точек отправки сохраняют в таблицах закрытого сегмента передачи данных.
26. Предполагают, что в моменты времени TD3,TF3 и TG3 аппаратура объекта Z (рисунок Фиг.2) зафиксировала время поступления сигналов и высоту HZ по бортовому альтиметру, рассчитала время движения и расстояния до точек отправки сигналов D3Z, F3Z и G3Z.
27. По координатам точек отправки сигналов (XD3,YD3,HD3), (XF3,YF3,HF3) и (XG3,YG3,HG3) и радиусам RD3 = D3Z, RF3 = F3Z и RG3 = G3Z сфер описанных из этих точек с использованием ранее приведенных формул задачи трилатерации определяют координаты точки Z (XZ,YZ,HZ). Вероятные ошибки, связанные с реализацией предлагаемого способа компенсируют поочередным изменением расстояний до наиболее удаленных точек отправки сигналов на 1 сантиметр до определения точки пересечения сфер.
28. Проверяют точность вычислением координат по высоте объекта HZ, расстояниям D3Z, F3Z и G3Z и координатам точек D3, F3 и G3 с использованием теоремы косинусов. Порядок вычислений данным способом рассмотрен в П.3, подпункт 4.
29. Проверяют влияние ошибок возникающих вследствие не одновременности поступления сигналов на точность определения координат точки Z по координатам точек D3 и F3 и расстояниям до них:
В качестве примера рассматривают объект, движущийся перпендикулярно траекториям полета ЛА (D,F и G) со скоростью 700 км/час, находящийся в момент отправки навигационных сигналов (t + 0,30) в точке Z, на дистанциях D3Z = 218264,629 м, F3Z = 213894,253 м, ячейки (B20 и B21). Сигнал, отправленный из точки D3, поступит в точку Z в (t + 0,30072754877), а из точки F3 в (t + 0,30071298084), то есть с задержкой на (ΔtDF = 0,0000145679) секунд, ячейка (C22) таблицы Фиг.4.
Для корректного решения задачи, рассчитывают координаты такого положения точки F3, при котором сигналы, отправленные из точек D3 и F3, поступили бы в точку Z одновременно. Для соблюдения этого условия сигнал из точки F3 должен быть отправлен примерно на ∆tDF = 0,0000145679 секунд позже. Тогда расчетное время отправки сигнала из точки F3 будет равно T3Р ОТПР = t + 0,30 + ΔtDF = 0,300014568.
За время между отправками сигналов в (t + 0,30) и (t + 0,35) ЛА (F3) переместится на 6,2493 метров по оси X и на -7,4477 метров по оси Y.
Применив метод интерполяции по координатам положения летательного аппарата (F3) в моменты времени t + 0,30 и t + 0,35, рассчитывают приращения координат его положения к расчетному моменту времени T3Р ОТПР = t + 0,300014568.

Из приведенного расчета следует, что в принятых условиях, расстояния, преодолеваемые источниками и потребителями навигационных сигналов за разницу времени поступления сигналов от летательных аппаратов из точек D3 и F3, не превышают долей миллиметров. Поэтому использование интерполяции для вычисления точных координат имеет смысл только для потребителей, движущихся с большими скоростями и при больших интервалах времени между отправками навигационных сигналов.
2.Способ по П.1, включающий установку ранее указанной аппаратуры, создание координатного поля синхронной отправкой навигационных сигналов группами летательных аппаратов, движущихся с постоянной скоростью по прямолинейным траекториям параллельно линии соприкосновения, отличающийся тем, что координаты точек отправки навигационных сигналов определяют с помощью ГНСС приемников.
Известно, что современные ГНСС приемники в режиме RTK способны определять координаты с точностью до единиц сантиметров при наличии сетей контрольно - корректирующих станций на удалении до 30 км.
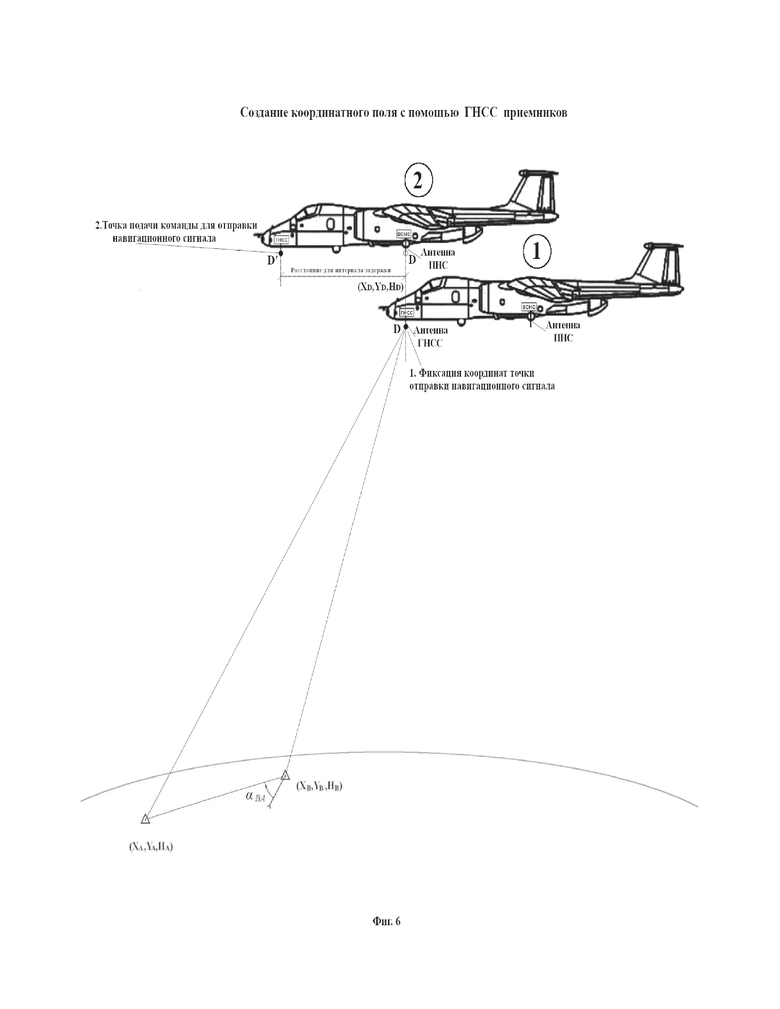
Технический результат в данном способе обеспечивают периодической фиксацией координат положения антенн ГНСС приемников, размещением указанных антенн впереди навигационных антенн бортовой аппаратуры, на удалении, обеспечивающем резерв времени необходимый для формирования навигационных сигналов. Резерв времени возникает в результате того, что при движении по прямолинейным траекториям для перемещения навигационной антенны в точку положения антенны ГНСС приемника зафиксировавшего координаты, требуется время.
Например, расстояние между антеннами 10 метров, на скорости 110 км/час летательные аппараты преодолевают за время, превышающее 0,327 секунды, которого вполне достаточно для формирования навигационного сигнала.
На рисунке Фиг. 6 показаны:
- антенна ГНСС приемника и антенна передатчика навигационных сигналов (ПНС),
- положение (1) в котором ГНСС приемник зафиксировал координаты положения антенны в точке D,
- положение (2) в котором антенна аппаратуры ПНС достигла точки D, точки фиксации координат ГНСС приемником, и аппаратура отправила навигационный сигнал,
- расстояние между точками D1 и D, это расстояние, преодоление которого летательным аппаратом обеспечивает задержку времени для формирования навигационного сигнала.
Летательный аппарат в точках (1) и (2) показан на разных высотах условно.
Порядок создания координатного поля:
При создании координатного поля аппаратура летательных аппаратов с заданной периодичностью фиксирует текущие координаты антенн ГНСС приемников, по времени движения навигационных антенн между точками D1 и D рассчитывает время отправки очередных сигналов.
В расчетное время аппарату ЛА отправляет навигационные сигналы, содержащие идентификационные данные, время и координаты ранее определенные ГНСС приемниками.
Пункты наблюдения принимают сигналы, определяют время движения, расстояния и вычисляют координаты точек отправки сигналов. Сравнивают вычисленные координаты с полученными. Корректировку точности выполняют корректировкой моментов времени отправки и координат, содержащихся в очередных навигационных сигналах.
Задание параметров траектории ЛА, контроль точности определения координат, отправки сигналов и документирования в данном способе выполняют в объеме и в последовательности изложенных в П.1.
3. Способ по П. 1, включающий установку указанной специальной аппаратуры, отличающийся тем, что при выполнении локальных задач для определения координат наземных объектов, используют отдельные летательные аппараты в качестве передающего звена между точками с известными координатами и точками координаты, которых необходимо определить.
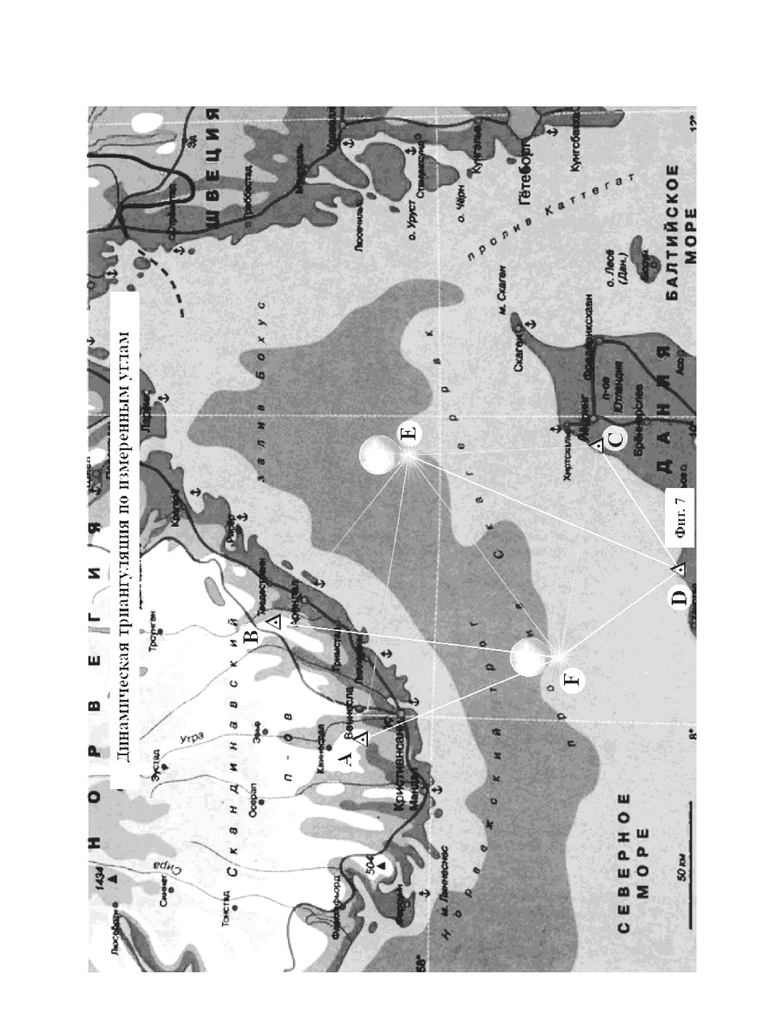
Известен способ динамической триангуляции или триангуляции с подвижными визирными целями, разработанный в 1920 г. финским геодезистом Вяйсяля.
Схема определения координат точек способом, разработанным Вяйсяля, показана на рисунке Фиг.7 , где точки A и B - точки с известными координатами, C и D – точки, координаты, которых необходимо определить. Точки E и F – точки текущего положения наблюдаемых с точек A, B, C и D воздушных объектов (целей). В качестве целей Вяйсяля использовал сбрасываемые с самолета воздушные шары со светящимися фонарями.
Сущность этого способа состоит в том, что по команде, синхронно в точках A, B, C и D с использованием теодолитов последовательно измеряют углы между фонарями (точки E и F). Далее измеряют углы треугольников ABE, ABF, CED и CFD.
По известным координатам точек A и B и углам ∠ AEB и ∠ AFB вычисляют координаты точек E и F, по вычисленным координатам и углам ∠ CED и ∠ CFD вычисляют координаты точек C и D.
В 40-х годах 20 века этим способом были соединены через остров Крит европейские и африканские триангуляции, а через пролив Скагеррак датские и норвежские. Метод триангуляции Вяйсяля, был применен для построения новой триангуляционной сети Финляндии со сторонами треугольников около 200 км и оказался весьма рациональным и высокоточным, но он требует много времени на проведение геодезических работ. Способ Вяйсяля можно называть способом динамической триангуляции по измеренным углам.
Известен способ определения положения в пространстве мобильных телефонов. Высокую точность их позиционирования обеспечивают за счет вычисления координат по расстояниям до станций сетей сотовой связи координаты, которых определены. Достаточно подробно способы позиционирования в сотовых сетях изложены в материале «ТЕХНОЛОГИИ ПОСТРОЕНИЯ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНЫХ ТЕЛЕФОНОВ В СЕТЯХ СОТОВОЙ СВЯЗИ» [2].
В этом документе указаны состав долгосрочных данных, которые используются аппаратурой станций сотовых сетей, позволяющих задавать IMSI - международные идентификационные номера абонентов, их права, приоритетные доступы, льготы, индексы, свойства (средства), коды блокировки закрытых групп пользователей, пароли и многое другое.
На основании изложенной информации можно предположить, что противоборствующая сторона, обладая полной (в том числе закрытой) документацией иностранных производителей аппаратуры сотовых сетей, имеет возможность создать устройства любого назначения, снабдив их соответствующими модулями, программно задав им все свойства сотовых телефонов.
Запросы этих устройств, будут восприниматься станциями наших сотовых сетей, как сотовые телефоны. По этим запросам, станции сотовых сетей, «сравнивая время приема сигналов в известных фиксированных пунктах, будут вычислять координаты положения с точностью до единиц метров, и отправлять их «потребителям». Факты наличия в аппаратуре средств поражения sim карт сотовых телефонов операторов противоборствующей стороны в ходе СВО уже зафиксированы.
Известен способ дифференциальной коррекции координат определенных с помощью ГНСС приемников потребителей, основанный на использовании поправок определяемых с помощью приемников устанавливаемых на наземных контрольно корректирующих станциях (ККС) [3]. Этот способ позволяет в режиме реального времени определять координаты потребителей с высокой точностью.
На ККС предварительно определяют опорные координаты точек установки ГНСС приемников с точностью до 5 см по широте и долготе и 0,5 м по высоте. При реализации способа ГНСС приемники ККС, по навигационным сигналам спутников определяют координаты. По определенным и опорным координатам вычисляют и передают потребителям дифференциальные поправки. Условно принято, что эти поправки постоянны, но по мере удаления приемников потребителей от контрольно корректирующих станций точность дифференциальных поправок уменьшается. Поэтому считается, что поправки актуальны на удалениях от ККС не превышающих 30-50 км.
Недостатками данного метода являются:
1. Полный отказ приемников при сбоях поступления сигналов спутников в результате воздействия естественных и искусственных факторов.
2. Необходимость создания густой сети ККС на всей территории предстоящих действий.
3. Высокая стоимость исполнения и обслуживания станций.
4. Отсутствие возможности создание таких сетей на неподконтрольной земной поверхности и вне суши существующими способами.
5. Необходимость принятия мер для исключения использования противоборствующей стороной корректирующих поправок наших сетей ККС для повышения точности нанесения ударов по нашим объектам.
Вполне очевидно, что эти уязвимости известны и работы по их купированию ведутся и у нас и у наших противников. Кардинальное решение этих проблем может быть достигнуто только путем отключения функций позиционирования воздушных и надводных объектов в сотовых сетях и сетях ККС в угрожаемый период и дублирования обозначенных услуг доступными только нам средствами.
Среди мер обеспечивающих безопасность могут быть предусмотрены изменения программного обеспечения станций сотовой связи и ККС, ограничивающие предоставление услуг потребителям, имеющим высоты уровня моря и высоты, превышающие 5 метров.
Обслуживание нашими станциями потребителей имеющих запрещенные параметры местоположения должно автоматически блокироваться, а сведения об их положении и маршрутах передвижения немедленно передаваться средствам ПВО и береговой охраны. При реализации способа предусматривающего изменение программного обеспечения станций сотовой связи и ККС возможности наших средств обнаружения надводных и воздушных объектов противника существенно возрастут.
Технический результат в предлагаемом способе достигают отправкой сигналов содержащих идентификационные данные, высоты точек и время, определением времени движения сигналов и расстояний между точками отправки сигналов, пунктами, наблюдения, координаты которых известны и точками, координаты которых необходимо определить и вычислениями координат.
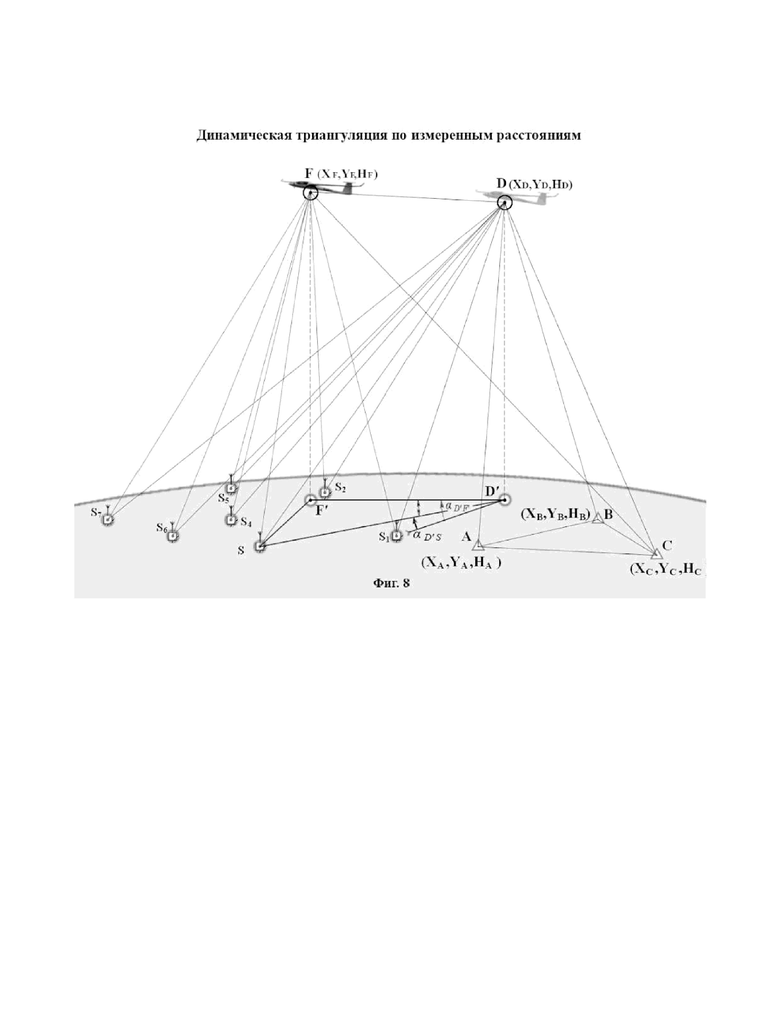
1. Для определения координат, бортовая аппаратура летательных аппаратов последовательно в нескольких точках фиксирует высоты и отправляет сигналы, содержащие идентификационные данные, высоты и время отправки, зафиксированное по бортовым атомным часам, рисунок Фиг. 8.
2. Аппаратура пунктов наблюдения и определяемых точек принимает сигналы, фиксирует время их поступления, определяют время движения и расстояния до антенн ЛА – AD, BD, CD,AF, BF,CF и расстояния до антенн определяемых точек DS1,DS2,DS,DS4,DS5,DS6,DS7.
3. По координатам антенн пунктов наблюдения (XA,YA,HA), (XB,YB,HB) и (XC,YC,HC) и определенным расстояниям АD (BD, CD,AF, BF,CF) в последовательности и по формулам трилатерации, содержащимся в П.1, вычисляют и сохраняют в ЗСПД координаты точек отправки сигналов D(XD,YD,HD) и F(XF,YF,HF). Сравнивает вычисленные высоты с зафиксированными бортовой аппаратурой перед отправкой сигналов.
4. Порядок вычисления координат определяемых точек по координатам точек отправки сигналов ЛА и расстояниям до них с использованием теоремы косинусов на примере точки (S):
Аппаратура определяемых точек по идентификационным данным и времени, содержащимся в принятых сигналах из ЗСПД выбирает координаты точек их отправки.
Из решения обратной геодезической задачи по координатам точек D и F определяют проекцию расстояния между этими точками на горизонтальную плоскость D'F':

и дирекционный угол из точки D на точку F

5. В качестве значения высоты точки S в первом приближении условно принимают высоту Н'D определенную с помощью «ГИС "Оператор" для силовых структур» по координатам ХD, YD. Н'S = Н'D
6. По формуле Пифагора определяют горизонтальную составляющую расстояния между точками D и S.

По теореме косинусов определяют горизонтальный угол

Определяют дирекционный угол из точки D' на точку S

Определяют координаты искомой точки (S) в первом приближении

Используя программу «ГИС "Оператор" для силовых структур» по полученным координатам ХS и YS определяют высоту точки НS.
По высоте НS проводят окончательный расчет координат положения искомой точки
 .
.
По теореме косинусов определяют горизонтальный угол
 .
.
Определяют дирекционный угол из точки F' на точку S
 .
.
Определяют координаты искомой точки (S) в окончательном виде.

С помощью «ГИС "Оператор" для силовых структур» по координатам ХS, YS определяют высоту точки HS.
Следует отметить, что ошибки определения координат в предлагаемом способе зависят от ошибок определения координат ПН и практически не зависят от удаления потребителей.
Количество одновременно обслуживаемых точек определяется только наличием на них аппаратуры. Так как точки неподвижны, контроль точности определения координат можно проводить многократно при каждом получении сигналов от любого имеющего указанную аппаратуру воздушного объекта.
4. Способ по П. 1, включающий размещение в районах потенциального нахождения важных объектов противника, специальных опорных координатных станций, отличающийся тем, что после размещения станции принимают сигналы воздушных объектов, определяют координаты своего положения, самостоятельно переходят в режим «сна», в назначенное время по сигналам, полученным из внешних источников, переходят в режим излучения навигационных сигналов.
Известен способ поражения цели артиллерийскими самонаводящимися боеприпасами (см., например, Кулешов П.Е., Ганин А.В., Неровный В.Н., Молоканов П.С., Кучерявый Р.П., Павлова Т.Н. СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ АРТИЛЛЕРИЙСКИМИ САМОНАВОДЯЩИМИСЯ БОЕПРИПАСАМИ, RU 2 738 330 C1, 11.12.2020) [4].
Сущность способа заключается в определении координат целей, вводе их значений в вычислители артиллерийских самонаводящихся боеприпасов (АСНБ), в доставке с помощью реактивной артиллерии нескольких приемопередающих блоков в район цели, в определении с помощью ГНСС координат местоположения каждого блока, формировании и передаче каждым приемопередающим блоком помехоустойчивых навигационных сигналов с координатами их местоположения, произведении запусков боеприпасов, приеме навигационных сигналов блоков, определении текущих координат боеприпасов относительно приемопередающих блоков и корректировании их полета на цель.
Недостатком этого способа является то, что он предполагает доставку приемопередающих блоков с помощью реактивной артиллерии, что является демаскирующим признаком, который может инициировать проверку противником неразорвавшихся боеприпасов (блоков) и смену предполагаемыми целями своих позиций. Сомнения вызывает и то, что удаление наших контрольно корректирующих станций от блоков может позволить обеспечить достаточную точность определения координат указанных блоков, а ККС противника не получат к моменту применения предлагаемого способа средства защиты от несанкционированного их использования.
Сущность предлагаемого способа, состоит в том, что для его реализации создают автономные герметичные устройства, включающие аппаратуру приема и передачи навигационных сигналов, вычислительные устройства и источники электропитания.
В целях маскировки устройства помещают в сменные корпуса напоминающие предметы местности.
Устройства размещают и закрепляют с помощью квадрокоптеров, агентурным и другими способами в недоступных, имеющих свободный обзор горизонта местах, Фиг. 2, точка (S). Например на крышах зданий, терриконах и подобных объектах.
После размещения специальные опорные станции в режиме радиомолчания принимают и накапливают информацию о сериях навигационных сигналов передаваемых пролетающими воздушными объектами, находящимися в пределах радиовидимости. Принимаемые сигналы содержат идентификационные данные, время отправки и координаты положения антенн ЛА в момент их отправки.
По координатам точек отправки сигналов и расстояниям до них в последовательности, изложенной в П.3, аппаратура специальных опорных станций рассчитывает координаты своего положения. По мере вычисления координат проводят сверку их значений. После достижения положительных результатов сверки координат определенных в нескольких сериях с заданной точностью станции переходят в «спящий» режим.
В намеченный период, по специальным сигналам, полученным из внешних источников, опорные станции переходят в режим излучения защищенных кодированных навигационных сигналов, содержащих идентификационные данные и координаты положения.
Средства для выполнения задач, которых размещались эти опорные станций, принимают сигналы. Корректируют свои траектории и выполняют задачи.
Следует отметить, что данный способ может быть применен при подготовке к нанесению ударов по объектам противника находящимся в глубине его обороны, на любом удалении, на любом континенте и любыми средствами поражения. В таких условиях в целях безопасности информацию о координатах и времени отправки сигналов пролетавших летательных аппаратов аппаратура специальных опорных станций может получать по другим каналам связи после их поступления.
5. Способ по П. 1, отличающийся тем, что на ведущие БПЛА стаи устанавливают указанную специальную аппаратуру, которая периодически или по команде одновременно с бортовыми приемниками ГНСС определяет координаты своего текущего положения, выполняя функции воздушных контрольно корректирующих станций, вычисляет и передает корректирующие поправки на ведомые БЛА, чем обеспечивает повышение точности определения их координат.
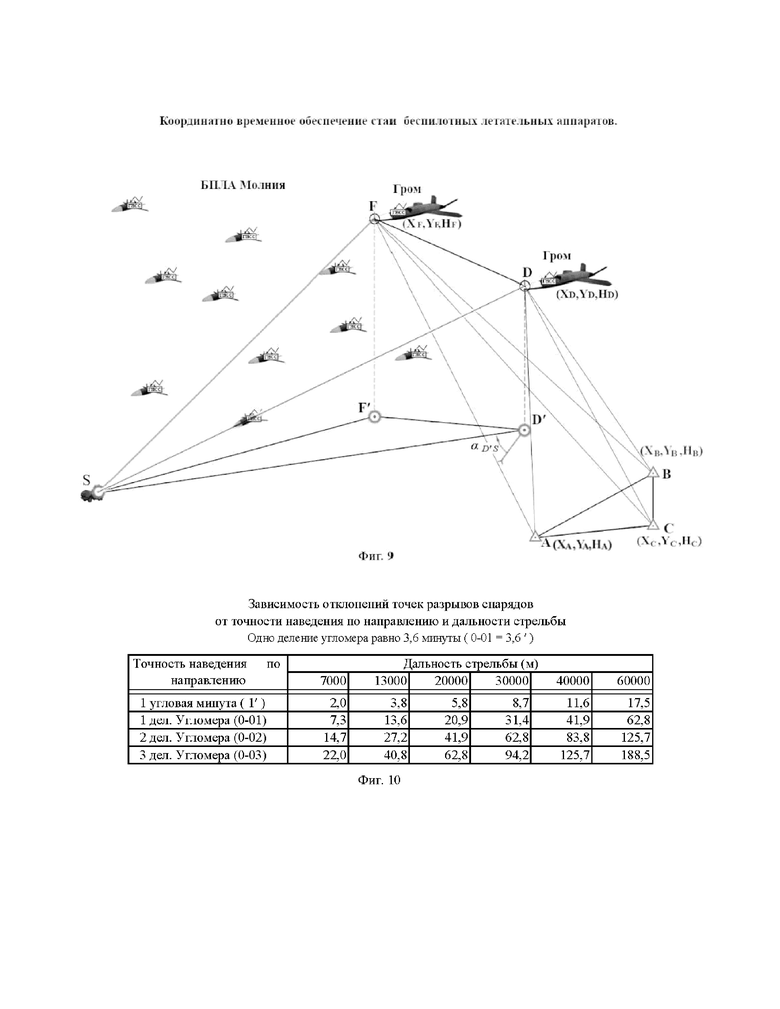
Известно, что в России разрабатывают технологии боевого применения групп (роев) беспилотных летательных аппаратов. Одним из таких проектов является беспилотник «Гром», который имея вооружение весом до двух тонн, может выполнять боевые задачи во взаимодействии с истребителями Су-35 или Су-57 и одновременно управлять применением 10-12 БПЛА «Молния» в режиме «роя».
Задача БПЛА «Гром» состоит в полете впереди ударной авиации на расстоянии в несколько сотен метров, провоцировании противника к применению средств ПВО, обнаружение целей и нанесение по ним ударов.
Заявленный технический результат достигается введением в состав систем управления всех летательных аппаратов ГНСС приемников, а на БПЛА «Гром» дополнительно приемопередатчиков навигационных сигналов наземных и воздушных станций, обеспечением радиоканала ввода поправок и целевых задач исполнителям, одновременным определением координат текущего положения БПЛА "Гром" по навигационным сигналам наземных и воздушных станций и по сигналам спутников, вычислением, передачей, приемом и вводом корректирующих поправок.
Сущность определения корректирующих поправок ГНСС приемников стаи БПЛА изображена на рисунке Фиг. 9.
В точках A, В и C показаны антенны пунктов наблюдения, координаты которых известны. В точках D и F - положение антенн БПЛА Гром в момент отправки навигационных сигналов.
При приближении к запланированному району боевого применения, ГНСС приемники БПЛА Гром фиксируют координаты точек отправки сигналов XDГНСС ,Y DГНСС, H DГНСС и передают сигналы, содержащие идентификационные данные, время отправки и закодированные координаты.
Пункты наблюдения принимают сигналы, фиксируют по своим часам время их поступления. Определяют время движения, расстояния АD, BD и CD. По координатам и расстояниям вычисляют координаты точек отправки сигналов D и F в последовательности и по формулам трилатерации, изложенной в П.1.
Определяют корректуры координат, как разницу координат точек D и F определенных ГНСС приемниками и вычисленных координат XD, YD, XF и YF.
ΔXDГНСС = XDГНСС - XD,
ΔYDГНСС = YDГНСС - YD,
ΔXFГНСС = XFГНСС - XF,
ΔYFГНСС = YFГНСС - YF.
Передают корректуры для ввода в аппаратуру БПЛА исполнителей Молния.
В случае необходимости, через некоторое время повторно определяют и передают корректуры координат. Таким образом, БПЛА Гром реализовывают роль подвижных контрольно корректирующих станций, чем обеспечивают высокую точность определения координат текущего положения каждого элемента стаи.
При обнаружении в полете объектов противника, фиксируют координаты своего положения, с помощью лазерных дальномеров определяют дистанции до них, вычисляют их координаты и выполняют задачу в соответствии с решениями операторов. Фиг.9, точка S.
6. Способ по П. 1, Включающий установку на оптических углоизмерительных приборах аппаратуры приема навигационных сигналов, отличающийся тем, что, указанная аппаратура применяется не только для позиционирования, но и для определения дирекционных углов и ориентирования по направлению средств поражения и разведки.
При подготовке и выполнении боевых задач необходимо ориентирование указанных средств по направлению. При внимательном рассмотрении кадров ведения боевых действий в зоне СВО можно заметить, что в значительной части артиллерии ориентирование по направлению осуществляется с помощью перископических артиллерийских буссолей (ПАБ-2А), прообраз которой был принят на вооружение в 1908 году. В начале 20 века дальности стрельбы артиллерии составляла от 7 до 13 км, и точности буссоли было достаточно для обеспечения поражения открыто расположенной живой силы противника. В настоящее время дальности стрельбы артиллерии значительно возросли и достигают 70 и более километров. При стрельбе по целям находящимся на указанных дальностях существующие и перспективные средства определения углов ориентирных направлений могут позволить провести только предварительное ориентирование дальнобойных средств поражения.
Зависимость отклонений точек разрывов снарядов от точности наведения по направлению и дальности стрельбы показана в таблице Фиг. 10. В соответствии с расчетами приведенными в таблице при стрельбе на дальности 20 километров, при ошибке ориентирования в одно малое деление угломера (3,6 ') отклонение точки разрыва от цели превысит 20 метров. Такое отклонение не позволит нанести существенные повреждения даже легкобронированной технике.
При больших дальностях стрельбы эффективное поражение целей возможно только при корректировании траектории полета боеприпасов при подлете к целям.
Вместе с тем существующие способы определения ориентирных направлений имеют ограничения в применении. Применение буссолей в условиях магнитных аномалий практически не возможно, как и применение высокоточных гирокомпасов в районах северных широт. Учитывая то, что все современные средства поражения имеют системы определения координат основанные на применении ГНСС приемников, логично их применение для определения углов ориентирных направлений и ориентирования боевых средств.
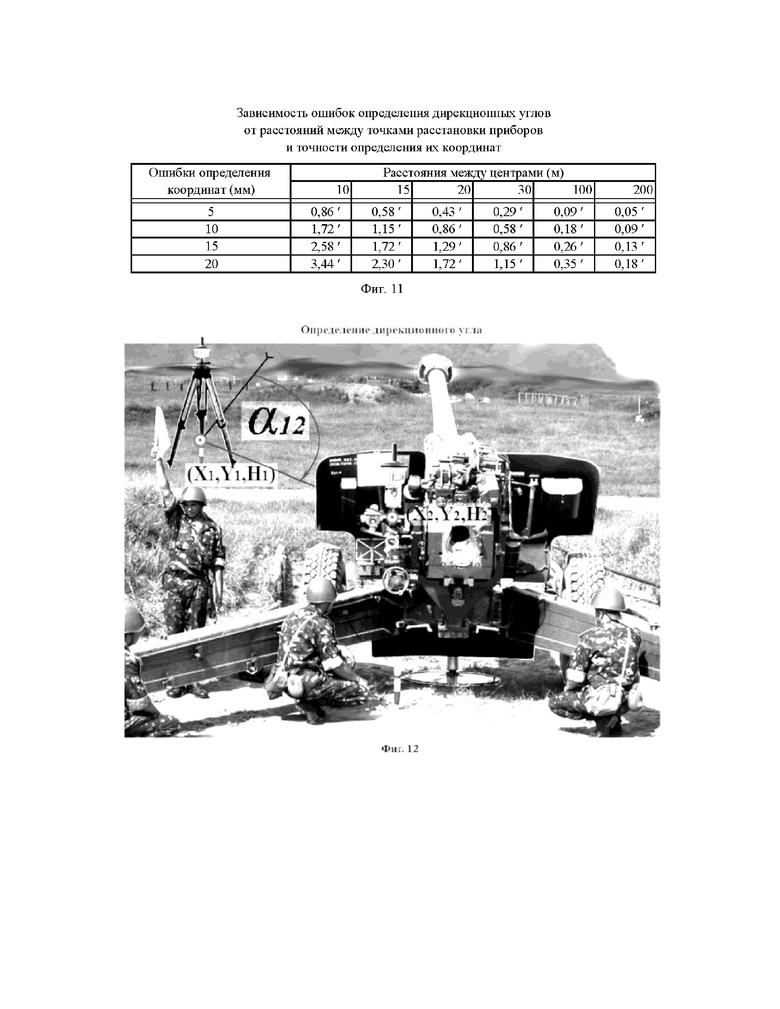
Технический результат в предлагаемом способе, достигают доработкой оптических углоизмерительных приборов указанной специальной аппаратурой, установкой их на взаимно удаленные точки, определением координат точек установки и вычислением дирекционных углов ориентирных направлений из решения обратной геодезической задачи. Необходимыми условиями использования координат двух точек для ориентирования по направлению, являются высокая точность их определения и большое взаимное удаление. Зависимость ошибок определения дирекционных углов от расстояний между точками расстановки приборов и точности определения их координат приведена в таблице Фиг. 11. Результаты вычислений, приведенные в таблице, показывают, что при расстояниях, между точками расстановки приборов превышающих 30 метров и ошибках определения координат 15 мм, ошибка определения дирекционного угла не превысит одной угловой минуты. Согласно документации производителей современные ГНСС приемники такую точность могут обеспечить.
Но такой способ потребует затрат времени и средств на создание сетей ККС.
Способ, предложенный в П.3, решает эту задачу быстрее и точнее. На рисунке Фиг. 12 предложен вариант решения задачи ориентирования по направлению артиллерийского орудия. В точке (1) показана дооборудованная указанной аппаратурой электро веха, в точке (2) дооборудованный указанной аппаратурой прицел одного из орудий.
При реализации способа устанавливают оптические углоизмерительные приборы на точки, определяют их координаты, по координатам точек из решения обратной геодезической задачи вычисляют дирекционные углы, которые применяют для ориентирования орудий по направлению. Предлагаемый способ позволяет не зависимо от магнитных аномалий и широты места быстрее, точнее и надежнее выполнить задачи ориентирования любых боевых средств.
7. Способ по П. 1, отличающийся тем, что с целью координатного обеспечения создаваемой инфраструктуры управления движением беспилотных транспортных средств Международных транспортных коридоров (МТК) в структуру вводят воздушные компоненты.
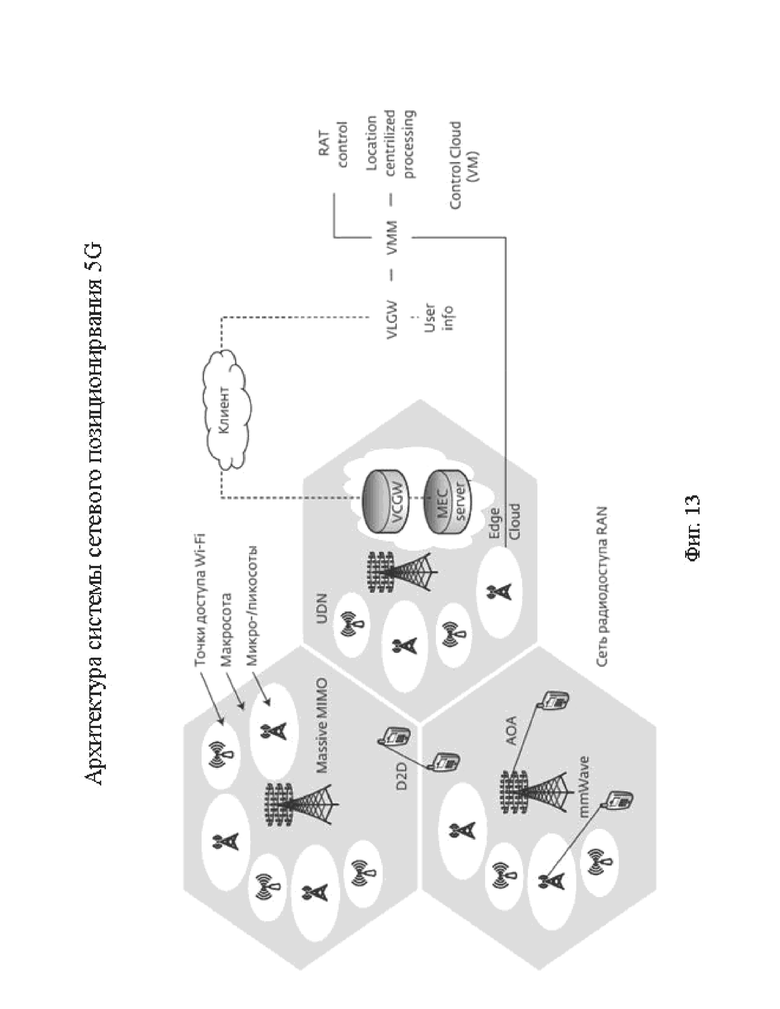
Известно, что в соответствии со «Стратегией цифровой трансформации транспортной отрасли Российской Федерации» к 2030 году в России планируется создание инфраструктуры для движения беспилотников всех видов транспорта. При создании инфраструктуры планируется введение пятого поколения беспроводных систем связи 5G, усовершенствованной дорожно-транспортной и телекоммуникационной инфраструктуры [5].
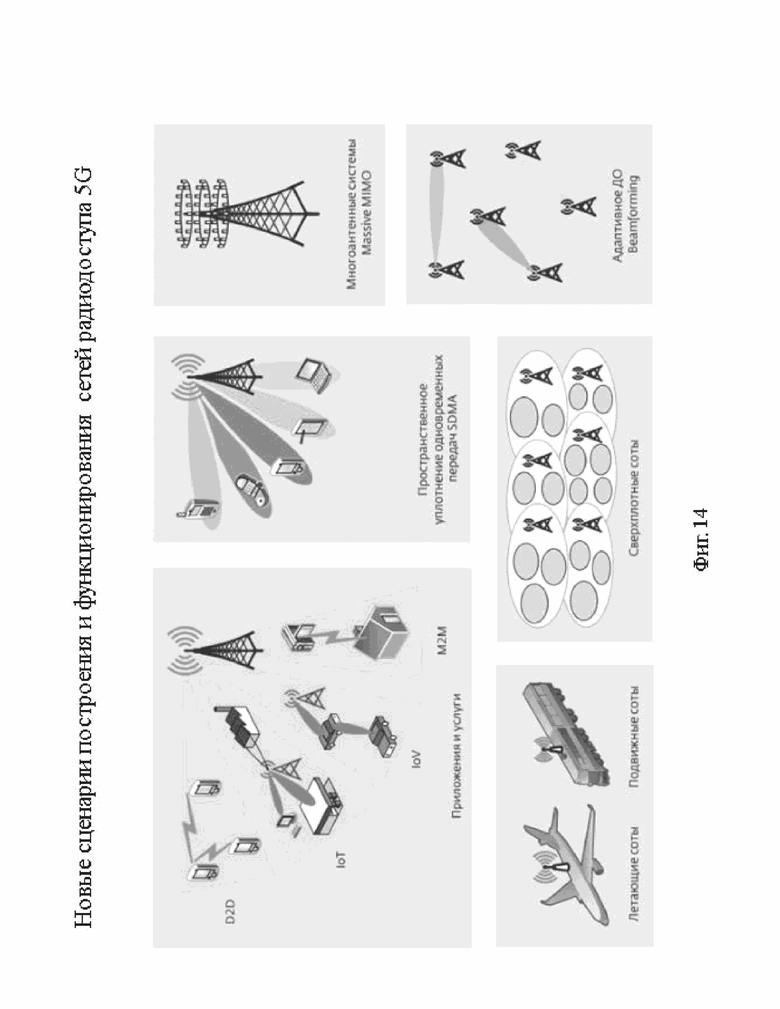
Важно отметить, что в соответствии с анализом архитектуры позиционирования, в сетях радиосвязи приведенным в [6], технологии 5G открывают новые возможности для повышения точности определения местоположения известными дальномерными и угломерными методами. Повышение точности позиционирования в 5G планируется созданием сверхплотных сетей опорных базовых станций, что влечет значительное увеличение их количества и затрат времени и средств.
При этом в отличие от « Новых сценариев построения и функционирования сетей радиодоступа 5G» [6], приведенном на рисунке Фиг.14, «Архитектура системы сетевого позиционирования 5G» [6], рисунок Фиг.13, не предусматривает использование подвижных, в том числе летающих сот для дальномерных измерений в целях позиционирования.
В предлагаемом способе в целях обеспечения транспортных средств Международных Транспортных Коридоров высокоточными координатами предлагается ввести воздушные компоненты и наземные средства их обеспечения, для чего использовать БПЛА движущиеся по прямолинейным траекториям, над международными транспортными коридорами.
Сущность и порядок создания координатного поля в предлагаемом способе показаны в П.1.
В отличие от существующих и «перспективных» способов указанных в стратегии, предлагаемый способ не требует создание сверхплотных сетей опорных базовых станций, что многократно снижает затраты времени и средств на создания основной цифровой составляющей инфраструктуры обеспечивающей движения беспилотных транспортных средств.
Существенные отличительные признаки заявленного способа по сравнению с существующими заключаются в следующем:
1. Главным отличием рассматриваемого способа является то, что для определения расстояний между точками отправки и приема сигналов предлагается отказаться от измерения физической величины задержки времени между метками отправки содержащихся в сигналах и моментами времени его поступления к потребителю [17]. В рассматриваемом способе время движения определяется как разница времени поступления зафиксированного по часам получателя и времени его отправки содержащегося в навигационных сигналах, выраженных в цифровой форме. В качестве возможного подтверждения того что предлагаемый способ определения расстояний имеет право на существование могут служить материалы содержащиеся в статьях [18],[19].
2. Предлагаемый способ обладает большей гибкостью и надежностью, в отличие от ГЛОНАСС в нем отправку навигационных сигналов осуществляют воздушные и наземные объекты, что не требует значительных затрат при нештатных ситуациях возникающих в космосе в результате случайных и преднамеренных воздействии. Воздушные навигационные станции являются только средством отправки навигационных сигналов содержащих координаты, рассчитанные наземными станциями перед их отправкой, поэтому в случае необходимости могут быть заменены другими имеющими указанную аппаратуру.
3. При воздействиях средств радиоэлектронной борьбы противника в предлагаемом способе могут быть применены способы противодействия, в том числе увеличение мощности и изменение частот передаваемых сигналов.
4. Траектории сигналов в предложенном способе не подвержены воздействию тропосферной рефракции, которая составляет 39 % ошибок ГЛОНАСС, а применение высокоточного способа определения расстояний между точками с известными координатами может позволить оперативно учитывать изменение диэлектрической проницаемости ионосферы (28% ошибок).
5. Точность определения координат в предложенном способе выше за счет точности определения координат исходных точек и многократно меньших расстояний между источниками и потребителями сигналов. Точность определения координат при увеличении дистанций между источниками навигационных сигналов и потребителями практически не меняется.
6. Решение математической задачи позиционирования в предлагаемом способе проще, чем в приемниках сигналов ГНСС. Приемники сигналов наземных и воздушных станций могут быть созданы в результате доработки приемников ГНСС.
7. Для позиционирования в особых условиях, например в условиях крайнего Севера для координатного обеспечения объектов находящихся в радиусе несколько сотен километров достаточно установить указанную аппаратуру на две точки с известными координатами, один воздушный объект и на точки, в которых необходимо определить координаты.
8. Для обеспечения высокоточными координатами стаи БПЛА достаточно установить указанную аппаратуру на управляющий БПЛА, который будет реализовывать роль подвижной контрольно корректирующей станции на удалениях в сотни километров без потери точности позиционирования.
9. Применение предлагаемого способа определения координат при определении углов ориентирных направлений позволит повысить точность ориентирования средств разведки и поражения по направлению.
10. Введение воздушной компоненты для координатного обеспечения транспорта в Международных транспортных коридоров многократно снизит затраты на создание их инфраструктуры.
Краткое описание чертежей
Фиг.1 Маршруты полета американских стратегического разведывательного БЛА RQ-4 Global Hawk и палубного самолета ДРЛО E-2C Hawkeye в районе Крыма.
Фиг.2 Вариант схемы создания координатного поля на неподконтрольной территории.
Фиг.3 Определение координат воздушных объектов решением задачи трилатерации.
Фиг.4 Таблица результатов определения координат положения воздушных приемопередатчиков навигационных сигналов при создании координатного поля на неподконтрольной территории на примере Самолетов М-55 "Геофизика".
Фиг.5 Учет высоты шарового сегмента при определении высоты ЛА. (Приведение расстояния DА к плоскости (Aс, Bс,C)) .
Фиг.6 Создание координатного поля с помощью ГНСС приемников.
Фиг.7 Динамическая триангуляция по измеренным углам.
Фиг.8 Динамическая триангуляция по измеренным расстояниям”.
Фиг.9 Координатно временное обеспечение стаи беспилотных летательных аппаратов.
Фиг.10 Зависимость отклонений точек разрывов снарядов от точности наведения по направлению и дальности стрельбы.
Фиг.11 Зависимость ошибок определения дирекционных углов от расстояний между точками расстановки приборов и точности определения их координат.
Фиг.12 Определение дирекционного угла.
Фиг.13 Архитектура системы сетевого позиционирования 5G.
Фиг.14 Новые сценарии построения и функционирования сетей радиодоступа 5G.
Список использованных источников
1. Бутенко В.В., Назаренко А.П., Основные положения концепции создания единой системы КВиНО Российской федерации, Телекоммуникации и транспорт 2008, № 2. https://cyberleninka.ru/article/n/osnovnye-polozheniya-kontseptsii-sozdaniya-edinoy-sistemy-kvino-rossiyskoy-federatsii/viewer.
2. «ТЕХНОЛОГИИ ПОСТРОЕНИЯ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНЫХ ТЕЛЕФОНОВ В СЕТЯХ СОТОВОЙ СВЯЗИ», https://zadereyko.info/downloads/library/tehnologii_pozicionirovaniya.pdf
https://zadereyko.info/library/pozicionirovanie_telefonov_soderjanie.htm.
3. Трофимов Д.А., Петров С.Д., Смирнов С.С., Волков Е.В., «Дифференциальные методы ГНСС и RTKlib», Санкт-Петербургский государственный университет Учебное пособие, СПб, 2023 г.
https://dspace.spbu.ru/bitstream/11701/39334/1/Differential%20GNSS%20and%20RTKlib.pdf.
4. Кулешов П.Е., Ганин А.В., Неровный В.Н., Молоканов П.С., Кучерявый Р.П., Павлова Т.Н. «СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ АРТИЛЛЕРИЙСКИМИ САМОНАВОДЯЩИМИСЯ БОЕПРИПАСАМИ», RU 2 738 330 C1, 11.12.2020. г. https://patents.s3.yandex.net/RU2738330C1_20201211.pdf.
5. «СТРАТЕГИЧЕСКОЕ НАПРАВЛЕНИЕ в области цифровой трансформации транспортной отрасли Российской Федерации до 2030 года», Распоряжение Правительства Российской Федерации от 03.11.2023 г. № 3097-р, http://government.ru/docs/all/150354/.
6 Фокин. Г., ЭВОЛЮЦИЯ СЕТЕВОЙ АРХИТЕКТУРЫ позиционирования в сетях подвижной радиосвязи, https://www.lastmile.su/files/article_pdf/8/article_8341_715.pdf.
7. Фокин А.П., Савкин К.Б.,Тихомиров С.В., Григорьев В.В., Способ синхронизации или сличения шкал времени и устройство для его осуществления (варианты), RU 2664825 C1, https://patentimages.storage.googleapis.com/2c/8d/01/d64ec2bfae2fc4/RU2664825C1.pdf.
8. Федорищев В.Д., Федорищев Д.В. Способ определения координат и углов положения осей подвижных объектов с помощью атомных часов, установленных на объектах и в пунктах наблюдения. RU 2678371 C2, 28.01.2019.
https://patents.s3.yandex.net/RU2678371C2_20190128.pdf.
9. Телешевский В.С., Арцебарский А.П., Кульбеков А.А., СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПРОСТРАНСТВЕННО ВРЕМЕННОГО ПОЛЯ. RU 2492517 C2, 10.09.2013.
https://patents.s3.yandex.net/RU2492517C2_20130910.pdf.
10. ЛУЩАКОВА И.Н., ГЕОМЕТРИЧЕСКИЕ АЛГОРИТМЫ ОПРЕДЕЛЕНИЯ
ТОЧКИ В ПЕРЕСЕЧЕНИИ ШАРОВ, Автоматика и телемеханика, № 5, 2020.
https://sciencejournals.ru/view-article/?j=auttel&y=2020&v=0&n=5&a=AutTel_2005009Lushchakova.
11. Программное Изделие ГИС «ОПЕРАТОР» для силовых структур,
(ГИС Оператор SE), Руководство оператора, ПАРБ.00048-02 34 01,
https://astralinux.ru/upload/parser_jira/certs/rukovodstvo_oreratora_RDY-3212.pdf.
12. ГЛОНАСС - российская глобальная навигационная система,
https://www.roscosmos.ru/21923/#:~:text=ГЛОНАСС%20-%20российская%20глобальная%20навигационная,морского%2C%20воздушного%20и%20космического%20базирования/.
13. «СТАНДАРТ ЧАСТОТЫ РУБИДИЕВЫЙ СВЕРХМИНИАТЮРНЫЙ КВАНТОВЫЙ НАП-КПН», ГОСУДАРСТВЕННЫЙ НАУЧНЫЙ ЦЕНТР РФ ВНИИФТРИ,
https://www.vniiftri.ru/upload/iblock/a07/a074a62081ea64bc92bdbf9992bd9914.pdf.
14. Интернет на солнечных крыльях Sunglider, статья, 14.10. 2020, https://dzen.ru/a/X4bextyayHh8Xon5.
15. Александров Г.М., Центр окружности по трем точкам, Лекция №73, 17.02.2019, https://www.youtube.com/watch?v=NxymFGspepA&t=34s.
16. PLANETCALC Онлайн калькуляторы, ООО "ПЛАНЕТКАЛЬК", Россия, Москва, https://planetcalc.ru/about/.
17. «Измерения дальности космического аппарата, УДК 629.7.051, С. П. Панько, Сибирский федеральный университет, г. Красноярск, Россия, Журнал Космические аппараты и технологии , 16.10.2015 г.», https://sciup.org/izmerenie-dalnosti-kosmicheskogo-apparata-14117359.
18. «NASA Tests Atomic Clock for Deep Space Navigation, Danny Baird, NASA Communications Specialist, FEB 06, 2018», https://www.nasa.gov/missions/tech-demonstration/nasa-tests-atomic-clock-for-deep-space-navigation/.
19. «НАСА протестирует ключевой инструмент навигации в дальнем космосе в этом году», Мариэлла Мун, Ведущий репортер,7 февраля 2018 г.
https://www.engadget.com/2018-02-07-nasa-test-deep-space-atomic-clock.html.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат и углов положения осей подвижных объектов с помощью атомных часов, установленных на объектах и в пунктах наблюдения | 2017 |
|
RU2678371C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СИСТЕМА НАВИГАЦИИ БЛИЖНЕГО ПОЛЯ | 2012 |
|
RU2602833C2 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Роботизированная пространственно-распределенная система радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2017 |
|
RU2666126C1 |
Использование: изобретение относится к области создания координатного поля, в том числе на не подконтрольных территориях при отсутствии и наличии ГНСС в целях создания условий для своевременного и эффективного выполнения задач. Сущность: формирование дублирующего координатного поля синхронной отправкой помехоустойчивых навигационных сигналов наземными и воздушными навигационными станциями. Для отправки навигационных сигналов предварительно определяют координаты антенн наземных пунктов наблюдения, устанавливают на воздушных объектах, в пунктах наблюдения и пунктах, координаты которых необходимо определить, специальную аппаратуру, предназначенную для точного определения расстояний между точками отправки и приема сигналов, модулей сопряжения с ГНСС приемниками, системами управления БПЛА, наземными комплексами управления. Сигналы, отправляемые наземными станциями, содержат идентификационные данные и время отправки. Координаты точек отправки сигналов потребители выбирают по полученным идентификационным данным и времени отправки из таблиц закрытого сегмента данных. Координатное поле на большую глубину создают синхронной отправкой навигационных сигналов с заданной периодичностью группами летательных аппаратов (ЛА), движущихся по прямолинейным траекториям параллельно линии соприкосновения. Прямолинейность траекторий позволяет вычислять координаты очередных точек отправки навигационных сигналов по координатам предшествующих точек методом экстраполяции, контролировать точность вычислений и отправки и при необходимости вводить корректуры. Координаты текущих точек отправки сигналов рассчитывают из решения трехгранных пирамид по формулам трилатерации по координатам наземных пунктов и расстояниям между точками отправки и приема сигналов. Расстояния определяют по времени движения сигналов и скорости распространения радиоволн. Навигационные сигналы, содержащие идентификационные данные, рассчитанные координаты точек отправки и время отправки формируют и отправляют наземные станции для каждого ЛА. Технический результат - обеспечение быстрого, точного и надежного выполнения задачи ориентирования любых боевых средств не зависимо от магнитных аномалий и географической широты места. Способ имеет более высокую точность и не требует создание сверхплотных сетей опорных базовых станций, что многократно снижает затраты времени и средств на создание основной цифровой составляющей инфраструктуры обеспечивающей движения беспилотных транспортных средств. 6 з.п. ф-лы, 14 ил.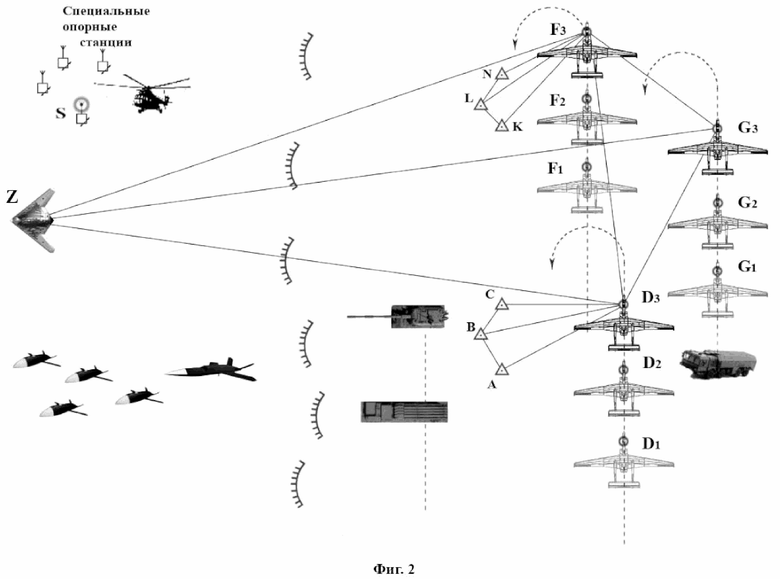
1. Способ создания высокоточного защищенного координатного поля, характеризующийся отправкой навигационных сигналов воздушными и наземными станциями, включает предварительное определение координат антенн наземных пунктов наблюдения, установку на наземные и воздушные станции, в пункты наблюдения и точки, координаты которых необходимо определить, аппаратуры, предназначенной для точного определения расстояний между точками отправки и приема сигналов, включающей многодиапазонные УКВ приемопередатчики с устройствами формирования, кодирования, декодирования, отправки и приема сигналов, малогабаритные атомные часы с устройствами задания и фиксации времени отправки и поступления сигналов, навигационные антенны, высотомеры, вычислительные устройства, устройства памяти, источники электропитания, модули сопряжения с приемниками Глобальной Навигационной Спутниковой Системы (ГНСС), системами управления беспилотными летательными аппаратами (БПЛА), наземными комплексами управления, отличающийся тем, что для отправки навигационных сигналов группы воздушных станций, движущиеся по прямолинейным траекториям с постоянной скоростью параллельно линии соприкосновения, периодически синхронно или последовательно отправляют помехоустойчивые навигационные сигналы, содержащие идентификационные данные, время и координаты точек отправки, определенные методом экстраполяции по координатам предшествующих точек, вычисленных по формулам трилатерации по расстояниям между точками отправки и приема сигналов и координатам наземных пунктов наблюдения.
2. Способ по п. 1, отличающийся тем, что дополнительно к ранее указанной аппаратуре устанавливают ГНСС приемники, создают координатное поле синхронной отправкой навигационных сигналов группами летательных аппаратов, движущихся с постоянной скоростью по прямолинейным траекториям параллельно линии соприкосновения, причем координаты точек отправки навигационных сигналов определяют с помощью ГНСС приемников, антенны которых размещают по ходу движения впереди антенн навигационной аппаратуры на расстояниях, обеспечивающих необходимую задержку времени для формирования сигналов, ГНСС приемники периодически фиксируют координаты очередных точек отправки, аппаратура во время движения летательных аппаратов между точками положения антенн формирует сигналы, отправляет навигационные сигналы в момент достижения антеннами навигационной аппаратуры точек фиксации координат.
3. Способ по п. 1, отличающийся тем, что при последовательной передаче сигналов от летательных аппаратов не менее чем из двух точек, содержащих идентификационные данные, включающие высоту, определенную бортовыми альтиметрами, и время отправки, зафиксированное по бортовым атомным часам, аппаратура пунктов наблюдения принимает сигналы, фиксирует время их поступления, определяет расстояния до точек отправки и их координаты и передает в закрытый сегмент передачи данных (ЗСПД) идентификационные данные, время отправки и рассчитанные координаты, при этом аппаратура точек, координаты которых необходимо определить, принимает сигналы, фиксирует время их поступления, определяет время движения и расстояния до точек отправки, по идентификационным данным и времени отправки из ЗСПД выбирает координаты точек отправки, по выбранным координатам и определенным расстояниям вычисляет координаты своего положения.
4. Способ по п. 1, отличающийся тем, что создают опорные координатные станции содержащие аппаратуру приема и передачи навигационных сигналов, которые размещают с помощью квадрокоптеров в районах потенциального нахождения важных объектов противника, при этом эти станции в режиме радиомолчания принимают сигналы пролетающих в пределах радиовидимости воздушных объектов, содержащие идентификационные данные, время и координаты точек отправки, фиксируют по своим часам время их получения, по времени отправки и получения определяют время движения сигналов и расстояния до точек отправки, по расстояниям и координатам точек отправки определяют свои координаты, переходят в режим сна, а по сигналу переводятся в режим излучения навигационных сигналов для корректирования траектории полета высокоточных боеприпасов при поражении целей.
5. Способ по п. 1, отличающийся тем, что ГНСС приемники устанавливают на несколько БПЛА, которые образуют стаю БПЛА, причем на ведущие БПЛА устанавливают дополнительную аппаратуру для приема и передачи навигационных сигналов наземных и воздушных станций, аппаратура ведущих БПЛА периодически определяет координаты своего положения и с помощью ГНСС приемников, выполняющих роль подвижных контрольно-корректирующих станций, по разнице координат вычисляет и передает корректирующие поправки на аппаратуру каждого ведомого БПЛА, которые с помощью принятых поправок уточняют координаты своего положения.
6. Способ по п. 3, отличающийся тем, что аппаратуру приема навигационных сигналов устанавливают на оптические углоизмерительные приборы, указанная аппаратура принимает сигналы воздушных навигационных станций, определяет координаты точек установки приборов, по координатам вычисляет дирекционные углы ориентирных направлений, которые использует для ориентирования систем по направлению.
7. Способ по п. 1, отличающийся тем, что группы БПЛА движутся по прямолинейным траекториям над международными транспортными коридорами, синхронно отправляют навигационные сигналы и создают высокоточное координатное поле на большую глубину.

