aiiTttiiiusi j рйсположен}1ой в плоскости. );:еп; ику- яр пй заданному направлеHiuo, а 1-а ког. закреплена одна пп;и;мк;.я аите jina.
, Уc:TpcMiCTHn iio и, 7; о т л и I: н ю IV. е f: с я тем, что оно дополHsrrtJib-io 1:на;1жено двумя передающими анччняами. расположенными в и;;оскос , псрпегщикуляркэй тадлнномл на-. ijl)(.
10. VcTpoftcTBO по п. 7, о т л и ч а ю 1Л ц t: t; я тем, что оно /юполннrej-bjio с;иабже} о ipoTbcfi прием}юй анчмшой,, злкрепК-Нион в трегье: KOFJTi-ij;iUD «:MOH точке на комбайне, :ie пе;:а ций на iipHMoii с пругимл тамгпюлируоглмм; точкагчи, причем Л|)хол 111 1и:миой ан1ч-нны подк::1о;ен к ныч;и.Л 1тельп()му блоку,
И. Устроигтпо по Г, 7, о т л l-f и л :г о с г 5; том, что, с л.елью ,.:ьио1л; контроля, И11дикатс р полож-чмя jjaooMuro органа комбайн:;. выподii,:; ) ;;5нд,р масштабного шаблона про:-::), 1. н;,1оаботки и двух взаимно перм;;и;:икуляр ых Jiein , привод мь:::-: ii:KXT;ii гельлымп члект ро;.1.вигатс;лякн , :.; о пкл: VI3 KOTCDbx закреилен ма.сииабион изображение рабочего органа света и державка., кото;а }ia дрлгой лент:::, призлгатели подключены к вы Tejii Ho)G блока, п по (,| лаблона зг.крег:;ы, подключенные .: еигпо пп. /, S и 15 е с. я rebj что креллены по контуру ; , ; ДОТО.-Л1 1Д на |Л11л-1 рабочего орга

1. Способ правлення положением рабочего оогана проходческого комбайна, основанный на контроле положения опорной точки и двух точек на комбайне, по координатам которых вычисляют координаты рабочего органа комбайна и формируют управляющий сигнал на корректировку положения рабочего органа, отличающий с Я тем, что, с целью повышения точности управления, координаты точек на комбайне определяют путем измерения времени прохождения электромагнитного сигнала от опорной точки до контролмруемьп точек на комбайне. ГО
моложе дтя раг
ем ;-ibiKo;i i nepL да;
; ;одк,лол(- ль:
: о с я тем, ч го 1ия рабо-ierc ;:)ргана -ельно : вторым U-: ) ходимо: вырал :-:асшг.бны-И шаб. г :1 - С С :-1Я Hi Т 3 О
);.;б.д::его Dpi с ;:а из 1 -.-атзриала , лричем зно- 5Ь;;;або кл по ;r:jieH:;i источн:-:ки свеfti-i ОДИОДЫ. t Hsoop.iTeHPic относится к cr ocoбa и устройствам для регулировдн;1я рабочегО движения врубопого механизма проходческого комбайна, перемещающегося по груди забоя, с определекия действительной позиции врубо вого механизма и с учетом положения проходческого комбайна относительно заданного профиля проходимого поперечного штрека. Лля определения местонахождения комбайна применялись луч .лазера и ряд устройств, с помощью кото1)ых измерялись отклонения местоположения комбайна от прямой, находяще/гся на одной прямо1( с лучом лазера. мощность лазера ограничена его конструкцией и рассеиванием светового луча лазера цьтью в } епосредстзенной б.1изости от комбайна. Известен способ управления положением проходческогчт комбайна, основанный на ко троле по.ложения опорной точки и точек на KOM6a;hie, по координатам которых вычисляются координаты рабочего органа ко;fCайна и формируется управ.1ЯЮ1ЦП{ сигнал на корректировку положения рабочего органа. Устройство л;ля осуществления известного способа содержит оптический излучатель, приемники сина.чов на комбайне, подключе исые к вт гч11слитель}юму блоку, к которому подключены датчики положения рабочого органа, и испол.нительпые м(. ll. Известные способ и устройст о обладают недостаточной точнос:л,ю, так как координат,; приемг-плкоя сигиалоп на комбайне onptvie.TMpjTC i черкез скорость поворота . опти юского из.-|у чателя. Также ограничено их применение при сильной запьпс :-ости воздуха в рабочей зоне комбаГгна . Цель изобретения - повышение точ ности управления . Поставленная цель достигается те что согласно способу управления пол жением рабочего органа проходческог комбайна, основанному на контроле положения опорной точки и двух точе на комбайне, покоорди} атам которых вычисляют координат) рабочего орган комбайна и формируют управляшццп си нал на корректировку положения рабо чего органа, координаты точек на комбайне определяют путем з epeния времени прохо;«дения элек ромагнитно го сигнала от опорной точки до дв ,гп1руемьгх точек на комбайне. Кроме того, дополнительно излучают электромагнитные сигналы из второй ТОЧК1;, расгтоложенной в плоскости, перг.еусшкулярной заданному направлению, а на ко бай;е эти сигналы принимают в одной кoнтpo. точке. Допо.чните.льно из.тучают также электромагнитные сигналы еще из двух точек, распсложен1;ьгх в плоскости, псрпендикллярно заданному направле ;ию. Электромагнитные с и ги алы принимают допол1П1те.чьно в контролируемо на комбГ:Г1не , не .г:ежаще 1 на г. с глгумя дрллл1ми контролируем.-ми , ри этом элсктрома сигналь из ,ой то.ки излхчают разделенны и во . Электро агмитн -1е с гналь из каждой точки из;тучаюг с разл :чной частоУстройство упра1 ле; Ия по.1:оже ием рабочего органа npoxoj. комбай а, содержащее оптический ;злучатель, 1р( пл комба/ г е , подключс н1-:; к .гч;;;:итол1л;оь;у блокл, к которому :кЛ ;л---- HI.; датчик положения рабочего ооганл, i :с:1олмите; ьныс :;ты, ;нл Же;о :1ередлтчиком и передаю ой , закрепленпо ; в точке , )1ми а теп;1а и, закре:;.%чп;мми г.С: комбайне i дяух ко1ггролируем1-гх точках, датчнKaNiii Kojinvca ко:-:бл(;нп относ осеи, инд; каторп ; . рабочего органа 5 причем вы :одь; передатчика и крепа год ключе-д. к вь 4 слитель {о 5у блоку, вькоды которого через индикатор псложои1 я рабочего органа соед 1нень с исполкителььгьгм -; элементами . Кроме того, устрО -:ство дополн тельно С -:абжено второГ передающе 1 анте 1НОЙ5 располож;енУ1О 1 в плоскост, перпендикулярной заданному направлению, а на комбайне закреплена одна приемная антенна. Устройство дополнительно с 1абжено двумя передающими anTeHHaNiH, расположенш М - в плоскости, перпендикулярной заданному направлению. Устройство допол ;ите-льно снабжено третьей приемной .ной, закрепленной в третьей контролируемой точке
на комбайне, не ;шжащей на сцной иря;-;ой с двумя другими кон ролК1) T04KaN H; причем Ыход iipiit;M ioA антенны подключен к вычислите чьному (локу С целью визуальиог-о конт|;)оля индикатор положе 5ия рабочего органа ксмбгй)1й выполнен в виде м сштабного ишблона Г1роход -;кой зырл пки и /иУх
E3iiH n O ИерПеКДИКуЛЯрНЬПч ,. ГФИЕОдимьгх исполнительным -тлектродпигатслями.. на гханой яз кторЬХ закрелле но масштабное изооражение рабочего органа о источником света и державка которая закреплена на другой ленгге, Л1) -глектродвигатели подключены к ,5Ь Холам вычислителг.ного блока-, а О контуру мас:цг: a6iiOio uia6;iovia закреплены фотодиодь, лодкл10ченпЬ1е к С1:гна.;;ьному блоку.
11сточникн света закреплены но Kotrrypy Niacurra6Horo iiiaGjiOHa а а)ото дио; на мас:ита.бном ; Чображй:1ин рабоче го о;-г ала.,
И -дикатор лсхюлсния рабочего органа гомОайла лон(Л;1иТельно снабже; втсоым ма1ллтабнг;; шаблоном ;рохо;;ямо }5ыг;або ь;и. между обоиг- :чac ;:тaб Li И паГггонами ра г-гсмд -нс Вг лук:;ое мао1Г,;.бног изоб;) оабочего (зргада из с мс тоосл абля го -ia 1 сриа.га чр-гчс;:in ПЗ НаблоПСИ Jij-lpap;) ЛО
его; КГуГГУРУ ;акпе м/le Uh: ;-г.; i и ликг гпг га, 1 на др--ло 1 - г;ото ди(..
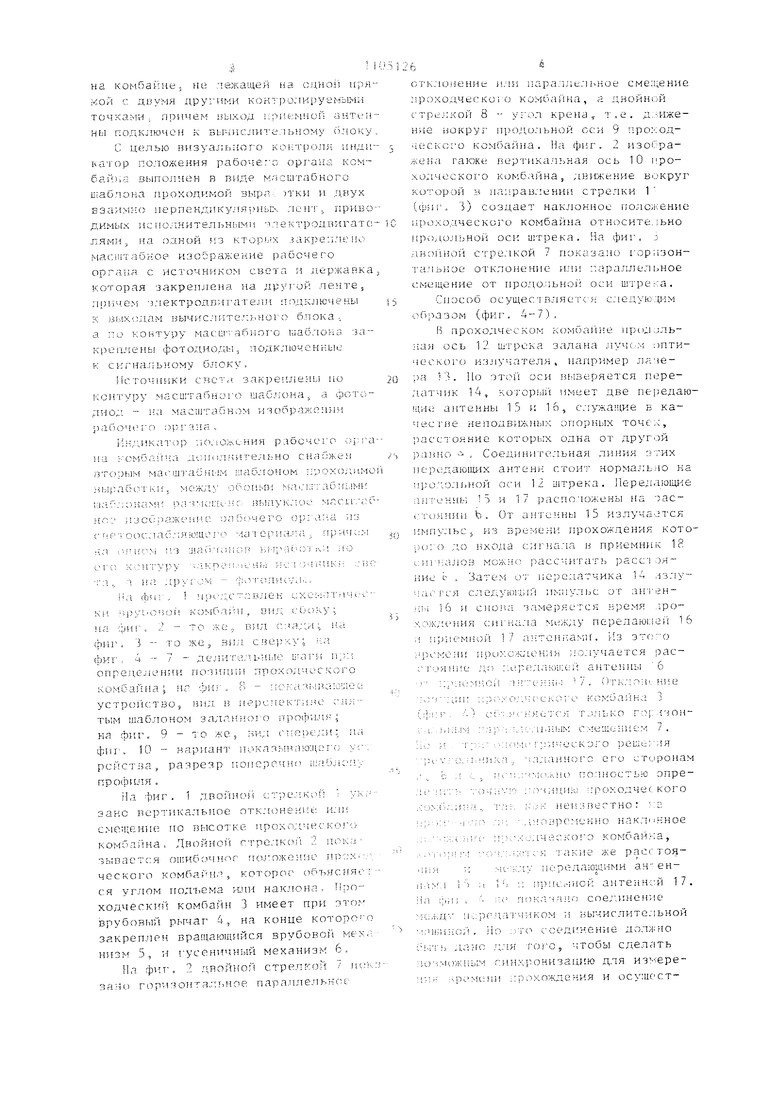
ма фмг, i чрсдставлен схе:-;аТГ- 10па аиг, 2 - то же,, вид (,дл на фиг. Ч - то же, ви,л сверку; га (риг, ч - 7 - делите,bHi,;U ;;аги ирг: опре,1,елении позидии дроходлес;с(;1О комбайна; i фн . В - л(д:а, з ;к;;о:; ес: устр(;} и:тво 5 вид в Hei)c;ieKiri;u; счигтым шаб,1оном задглпюго трофил;-; на фиг. 9 - то же. ;«-;д оперс, на фиг. 10 - вариант ноказываю:цс;г1; vo,, ройс- гва, разреяр шпсрачно .иолу про(Ьиля .
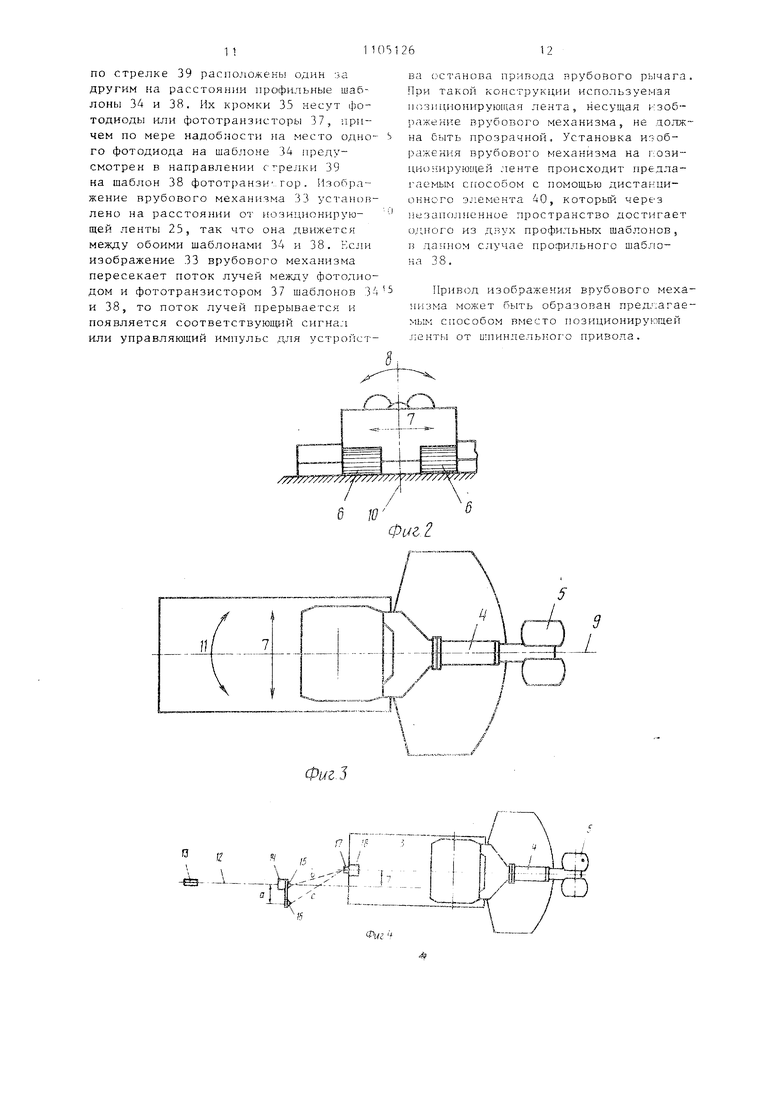
На фиг. I двойнс;й сггре,лкой укг зако вертикальное отклонегнь; или сме цение но высотке дрохо,дческо1о комбайна . Двойной стрелксч j зьтастся оп;ибочног rioj-ожение прох.-г ческого комбай а,, которое объясняе;ся углом нодьема или наклона. Проходческий комбайи 3 имеет npis этом врубовый рычаг 4, на конце которо -о закреплен врапитюгдийся BpyOoBofi мех.-: иизм 5, и гусеничный механизм 6.
6
огкло11ение или иаралле:1ьное сме;цение проходческого комбайна, а двойной cтpeJ;кoй S - угол крена, т.е. д,-.иженне вокруг ;трод,о:1ьной сс:и 9 Г;ро/;о,дческого ко байна. На фиг. 2 изо фажена также вертика,л)Ная ось 10 ирохо;гческого кo ;бaйнa5 движение вокруг которой в 1а; равлении стрелки 1 ир.ч I, 3) создает наклонное 1юло;кение г; р i,i : o,-:i ч 6 С к о ГО к ом б а ij н а относите, i ь н о П1тол,ольной1 осг: иггрека. .Ча фиг, ,; дво1ию11 стрелкой 7 показано горизонта,1, отклонение и„И г.араллел 1Д1ое c ieiцeниe от нродо,чьной ocvi штрека.
Снэсоб осущес вляетсл; следую,;1;1- м образом (фиг, 4-7),
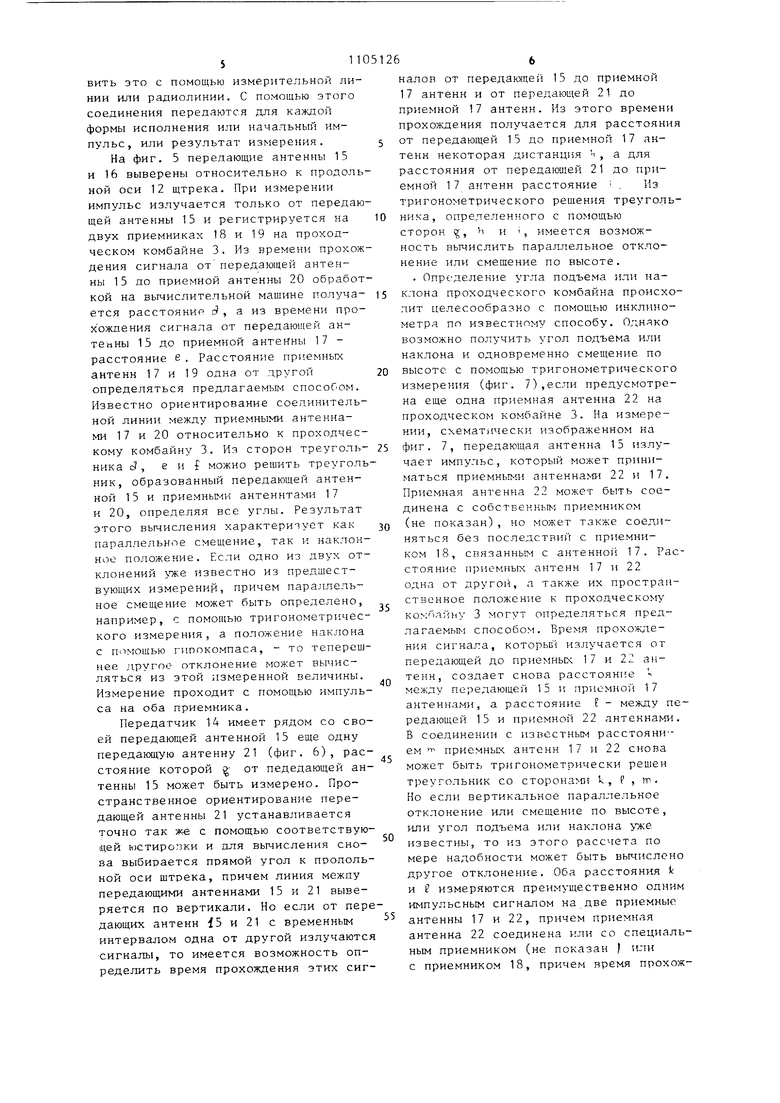
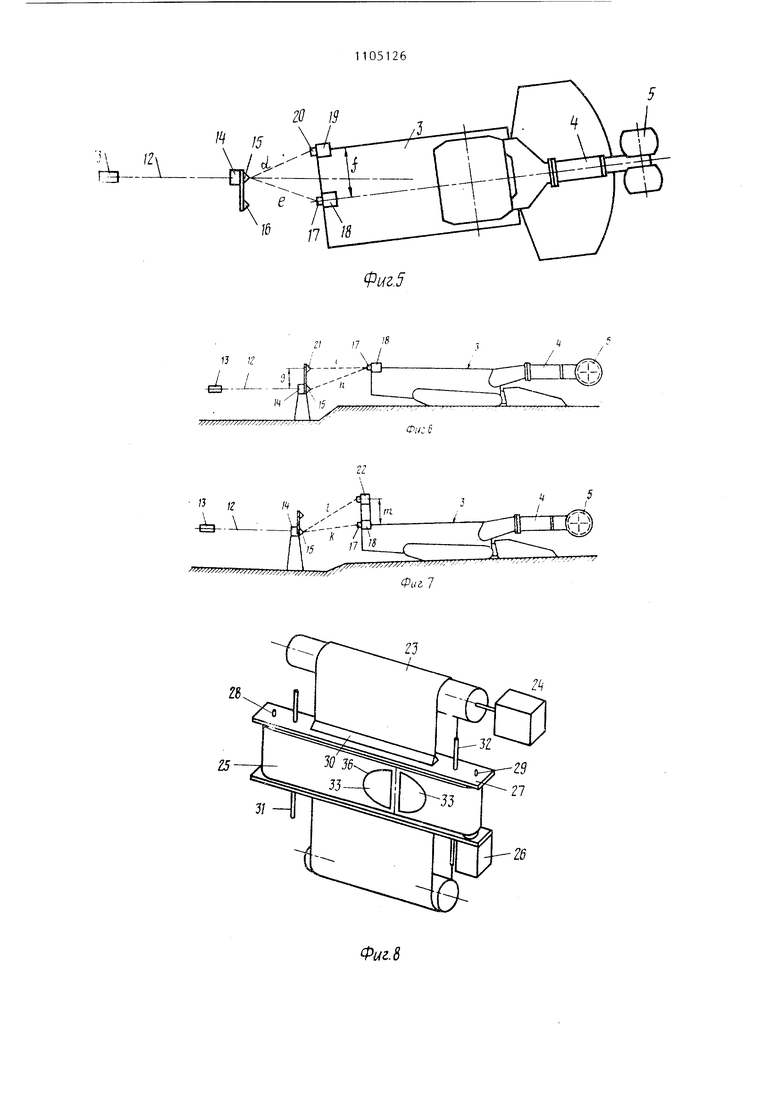
К прохо;1ческом комбаЙ1}-:е 1род:,;ль ая ось 12 штрека задана луч(,м оптического излучателя, например лазе,а, 13. Но oTOji оси выверяется перед„атчик 14, который имеет две передаю Ц,ие а ггенны ID и 1о, слу;«а цие в качестве неподвит-чных onoptUiix точех, ;5асстоянне которых одна от друг1:)й :а}5но , Соедините:1ьная линия этих е1)едаю1цих антенн стоит нормально ка продольной o(4i 12 LiiTpeKa. Передагощие антенны : 5 и 17 )асположены на )ас,-то1ПП и Ь. От антенны 15 излучается импульсJ из времени прохождения кото5иг () ,до входа ,ла в приемник 18 einrajiOB можно рассч}ггать рассюяние с- . Затем от |;е;зедл-:чика 14 нз:1учас1ся следу1()тд1й и :пyлlJC от антенлы |6 и ciiOiia замеряется ;зремя трохождения сигнала гежду передаю1:1ей 15
rpiM-CHH нрохож;1ении лолучается расС1; 1яние до лереда:ои:ей антенны 6 : лрги-млои -Hrixxxii.; /. Отклол, ние хлггри; гр;л--о,-чес JvOro ко ;байна 3 (фг г . т) сб: г сг ;1л;чя только го|х1зон; i, ьггг.; г,; р ; г г, , ii,i;i:iN; osemeiHie-- 7, :-,; и ;-,- :i:;n:,- ip;ллес,Лхого 1)еь1егля
РV V л,;, л:чияа , заданного его стсфона , ,, Ь ,; ;, ,, ГСr;O-io, полностью опрелг :лт;- :оч;г-Г: гозидп; гро ;одче( кого ,л,)--:бг;лг,1 ,, Г:,л-: неизвестно: га ::.,: -1 ,г- ::: , (-мень о накггпнное ,г тг,1}:гл- лр,г-г,л1ческого комбай :а, ,-,- ег-:--1 огг. г; ся такие же расстоя,п)1 л нс:реда;о1цими ан- ен1ГО-Г1 |3 л iP л анте;1ной 17 На ::ги . - rioKaaajio соединение лс/кд-. пс; сдатчиком л г ычислительной :;л :инсл , ilo лто соединение долллю сг;т, дано д,ля roio, чтобы сделать зозложньг- си хронизадию для из--;ерелл.- зрем1ЛН1 лрохождения и осушествить это с помощью измерительной линии или радиолинии. С помощью этого соединения передаются для каждой формы исполнения или начальный импульс, или результат измерения.
На фиг. 5 передающие антенны 15 и 16 выверены относительно к продольной оси 12 щтрека. При измерении импульс излучается только от передающей антенны 15 и регистрируется на двух приемниках 18 и 19 на проходческом комбайне 3. Из времени прохождения сигнала от передающей антенны 15 до приемной антенны 20 обработкой на вычислительной машине получается расстояние с9 , а из времени прохождения сигнала от передающей антенны 15 до приемной антенны 17 расстояние е. Расстояние приемных антенн 17 и 19 одна от другой определяться предлагаемым способом, Известно ориентирование соединительной линии между приемными антеннами 17 и 20 относительно к проходческому комбайну 3. Из сторон треуголь- 25 фиг. ника с , е и f можно решить треуголь ник, образованный передающей антенной 15 и приемными антеннтами 17 и 20, определяя все углы. Результат этого вычисления характеризует как параллельное смещение, так и наклонное положение. Если одно из двух отклонений уже известно из предшествующих измерений, причем параллельное смещение может быть определено, например, с помощью тригонометрического измерения, а положение наклона с помощью гирокомпаса, - то теперешнее другое отклонение может вы -шсляться из этой измеренной величины. Измерение проходит с помощью импульса на оба приемника. Передатчик 14 имеет рядом со своей передающей антенной 15 еще одну передающую антенну 21 (фиг. 6), расстояние которой g- от педедающей антенны 15 может быть измерено. Пространственное ориентирование передающей антенны 21 устанавливается точно так же с помощью соответствующей юстиропки и для вычисления снова выбирается прямой угол к продольной оси щтрека, причем диния между передающими антеннами 15 и 21 выверяется по вертикали. Но если от пере дающих антенн i5 и 21 с временным интервалом одна от другой излучаются сигналы, то имеется возможность определить время прохождения этих сигналов от передающей 15 до приемной 17 антенн и от передающей 21 до приемной 17 антенн. Из этого времени прохождения получается для расстояни от передающей 15 до приемной 17 антенн некоторая дистанция п , а для расстояния от передающей 21 до приемной 17 антенн расстояние . Из тригонометрического решения треугольника, определенного с сторон , Ь и , имеется возможность вычислить параллельное отклонение или смещение по высоте.
. Определение угла подъема или наклона проходческого комбайна происходит целесообразно с помощью инклинометра по известному способу. 0;;няко возможно получить угол подъема или наклона и одновременно смещение по высоте с помощью тригонометрического измерения (фиг. 7),если предусмотрена еще одна приемная антенна 22 на проходческом комбайне 3. На измерении, схематически изображенном на 7, передающая антенна 15 излучает импульс, который может приниматься приемными антенна ш 22 и 17. Приемная антенна 22 может быть соединена с собстБенны приемником (не показан), но может также соединяться без последствий с приемником 18, связанны.м с антенноГ; 17. Расстояние приемных антенн 17 и 22 одна от дpyгol, а также их пространственное положение к проходческому комбайну 3 могут определяться предлагаемым способом. Время прохождения сигнала, которьй излучается от передающей до приемных 17 и 22 антенн, создает снова расстояние между передающей 15 и приемной 17 антеннами, а расстояние Е - между передающей 15 и приемной 22 антеннами. В соединении с известным расстоянием т приемных антенн 17 и 22 снова может быть тригонометрически решен треугольник со сторона п1 k, Р , т. Но если вертикальное параллельное отклонение или смещение по высоте, или угол подъема или наклона оке известны, то из этого рассчета по мере надобности может быть вычислено другое отклонение. Оба расстояния и измеряются преимущественно одним импульсным сигналом на две приемные антенны 17 и 22, причем приемная антенна 22 соединена со специальным приемником (не показан ) и.ли с приемником 18, причем время прохожneiinjiнон 1
; I / мости ;vr я;„
(17 НрСМОИИ i
ate и IT if iTj)i
.м;: , (.ПМРре ИЯ nPiUiO,:... искл с J U5 i Ь П ос ;
(;о iept; налоОилс 1
МереПН О
запоми;- пются -мс с
ки rspONfc-ni И-; гт.-;.
::а1ли 1Ы дчя лл.
Позиция пруСтг
СИТе,ТЬИС) СТаНИ.
бя.йн,. может finp(;;
двух i: NCpCHI-i i у г
по горизонтали и ряется ; ;in;rpHMOf ,
ног о и O ilCOjCTHCMT
э :т t; к т р о о и г; i ч с г 1-л) с угла noRipcrra я к протмвл«л;1 я итсте ле лтого латчика женин л. -(ллглюи
КреТг Ы 1 С111Ч Л: (|
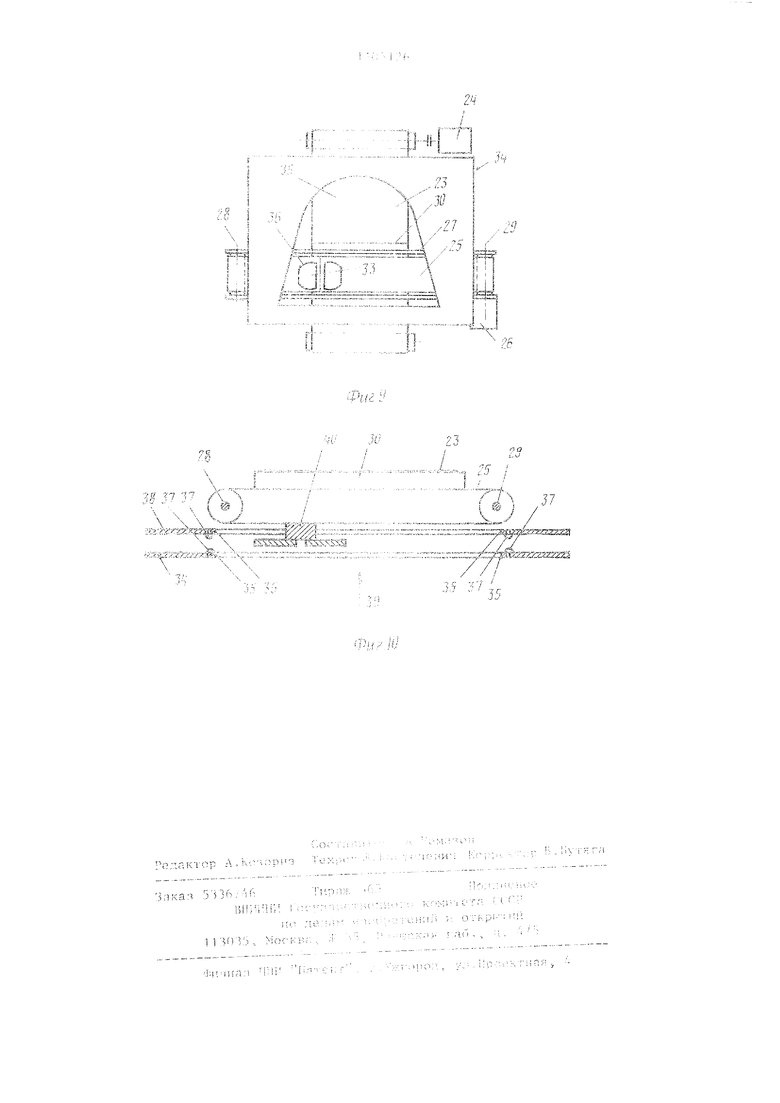
.о-) лл- ача -ла--:,9ную позиционирующую ленту 23, приво которой производится с помощью испо нительного двигателя 24. На этой ленте расположена горизонтальная позиционирующая лента 25, которая приводится от исполнительного двига теля 26. Державка 27 осей 28 и 29 для перевода ленты 25 жестко связан по линии 30 с лентой 23. Исполнител ный двигатель 26 для ленты 25 установлен при этом так же жестко на державке 27. Для ведения ленты 25 предусмотрены ведущие штанги 31 и 32. Лента 25 несет изображение врубового механизма 33. С помощью управления двигателем 24 для привод вертикальной позиционирующей ленты 23 горизонтальная позиционирующа лента 25 сдвигается в направлении своей высоты и масштабированное изо ражение 33 врубового движется в вертикальном направлении. Исполнительный механизм 26 движет изображение 33 врубового механизма в различные стороны. На фиг. 9 показан шаблон 34,внут ренний контур 35 которого изображает масщтабированное изображение заданного профиля. Комплектное показьазаюпше устройство может быть смонтировано предла гаемым способом в пьиезацишенном корпусе (не показан), причем передняя стр-нка этого корпуса должна быть выбрана прозрачной. Если контур 36 изображения врубового механизма 33 осна.чсн светодиодами, а контур 35 шаблона 34 фототранзисторами 5 то последние выдают сигнал в случае, если свет, излучаемый от светодиодов контура 36 изображения врубового механизма 33, падает на фототранзисторы. Этот сигнал означает, что врубо вой механизм касается кромки заданного профиля. При поступлении таког сигнала лицо, обслуживающее проходческий комбайн, может предпринять соответствуюп ую коррекцию для управ ления врубовым механизмом. Но этот сигнал может также применяться для останова поворотного прив-ода с помощью электрогидравлического исполн тельного механизма. В зависимости от оснащения показьтающее устройство выполняет разли ные задачи. Например, с его помощью может происходить только показание позиции врубового механизма, причем 610 врубовой рычаг полностью свободен и двигается маишнистом комбайна вн€ заданного профиля. При оснащении показывающего устройства светодиодами и фототранзистораьш может появляться оптический или акустический предупредительный сигнал, как только контур врубового механизма коснется заданного профи:ш или начнет его переходить . Управление позиционир топсими лентами происходит или с помощью непрерывно работающих исполнительных двигателей и потенциометра или преобразователя угла поворота в код, или имеет щаговь е двигатели. У некоторых форм исполнения (не показаны) могут устанавливаться на расстоянии параллельно один другому два шаблона, заданньй профиль. В этом случае кромка внутреннего контура этих шаблонов, которьм соответствует заданноь у профильо, может быть оснащена светопроводами, светодиодами и/или фoтo paнзиcтopa п, причем позиционирующие ленты выполнены прозрачны ш. Эти шаблоны должны устанавливаться так, чтобы по мере надобности один шаблон cAiUi расположен перед позиционируюией лентой, несущей изображение врубового механизма, а другой - позади ее. Если изображение врубового г-;еха1П1зма выполнено светоослаб.-теннььм, то наступает изменениесигнала, измеренно1о фототранзистором, как только контур изображения врубового механизма пересечет поток лучей между внутренними кромками шаблонов. В этом случае такое отклонение сигналов фототринзисторов применяется для срабаты зания оптических или акустичесю-гх предупредительных сигналов или для останова врубового привода. Шаблоны, имеюии1е заданный профиль, могут быть заменены согласно предлагaeмo гy способу. При этом используются картинки с различными масштабам вырубаемого профиля. Шаблоны могут иметь прерывание по контуру, которое соответствует задан1юму вырубаемому профилю, или меньшую прозрачность в областях вне изображенного в масштабе заданного профиля, чем в пределах этой области. В конструкции, изображенной на фиг. 10, горизонтальная позиционирующая лента 25 несет изображение врубового механизма 33. В направлении
по стрелке 39 расположены од.н за другим на расстоянии профильные шаблоны 34 и 38. Их кромки 35 несут фотодиоды или фототраязисторы 37, гфичем по мере надобиост11 па место одного фотодиода на шаблоне 34 предусмотрен в направлении с-г-релки 39 на шаблон 38 фототранзи гор. Изображение врубового механизма 33 установлено на расстоянии от пози1дион 1рующей ленты 25, так что она движется между обоими шаблонами 34 и 38. изображение 33 врубового механизма пересекает поток лучей между фотодиодом и фототранзистором 37 шаблонов 34 и 38, то поток лучей прерывается и появляется соответствуюш;ий сигнал или управляющий импульс для устройства останова привода прубового рычага. При такой конструкции используемая позппнопирующая лента, несущая изображен :е врубового механизма, не должна Сыть прозрачной. Установка изображения врубового механизма на позиционирующей ленте происходит предлагаемым сггособом с помощью дистанпионного элемента 40, который через e3ancjjiHeHnoe пространство достигает одного из профильных шаблонов, в данном случае профильного шаблона 38.
П-рнвоц изображения врубового мехаН --;зма может быть образован пред-;агаемь способом вместо позидионирующей ленты от шпинлелыюго привода. й
Фцг.5 19
;з ,
л
ГГ
Л
2
/Тт1г Т
I -, -. t
....:., :G/k x«2 spiv:: - ss3;:-K
; //V
a.f: 2 xyyxfe..; :v; -;r--,--r-;;-;™:;;:::-;--;:-:;::;:::::::v-v -.:::;;:--.:™ ::-:™::r5i :Treaa2222Z52S a
ц..
FH
ч /
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
