Изобретение относится к наземным робототехническим комплексам военного назначения, в частности к способам решения огневых задач в дистанционном или автономном режиме.
Известен целый ряд технических решений, направленных на обеспечение процесса дистанционного решения огневых задач, а именно наведения и стрельбы из стрелкового оружия. Например известно стрелковое оружие с дистанционным управлением (Патент RU № 2460027, Опубл. 27.08.2012 г.), содержащее устройство с тягой изменяемой длины, соединенной со штоком электромагнитного реле автомобильного стартера и рычагом, который упирается в спусковой крючок стрелкового оружия.
Устройство автоматического управления спаренным пулеметом (Патент RU № 2642222 опубл. 24.01.2018 г.), содержащее станок с подвижной и неподвижными частями, установку с оружием, размещенную на подвижной части, закрепленный на неподвижной части привод горизонтального наведения, механизм вертикального наведения, кинематически связывающий привода с установкой. Установка разделена на первую и вторую части, соединенные соответственно через первую и вторую части механизма вертикального наведения с первым и вторым приводами этого механизма, каждая часть которого выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, жестко закрепленного на оси одного червяка, размещенного на подвижной части и взаимодействующего с зубчатым колесом, жестко связанным с разделенной частью установки, и сопряженного с другим червяком, ось которого совмещена с вертикальной осью поворота подвижной части, при этом стволы соответственно размещены на первой и второй частях установки.
Боевой модуль АУ-220М с артиллерийской установкой для размещения на военной технике (Патент RU 55117 U1, Опубл. 27.07.2006), содержащий боевой модуль с артиллерийской установкой для размещения на подвижных боевых средствах, состоящий из бронированной башни с артиллерийским орудием, боеукладки, системы заряжания и прицельно-наблюдательного комплекса, 57-мм автоматической пушки, системы управления огнем.
Способ ведения боевых действий, система дистанционного управления стрельбой и дистанционно-управляемое стрелковое оружие (Заявка на изобретение № 2004110354, Опубл. 20.10.2005 г.). Система дистанционного управления стрелковым оружием, содержащая по меньшей мере, одну единицу стрелкового оружия, установленную стационарно и содержащую видеокамеру, привода вертикального и горизонтального перемещения, привод спускового механизма и приемнопередающее устройство, соединенные каналом связи через управляющее приемнопередающее устройство с компьютером, имеющим монитор и устройство управления, например «джойстик». Стационарное стрелковое оружие оборудовано оптическим прицелом с лазерным целеуказателем.
Известен боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня (Патент RU №2813397 Опубл. 12.02.2024 г.) содержащий легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления. При наведении на цель оператор используя пульт управления воздействует на спуск оружия ведет огонь по целям.
Как следует из описания аналогов, наведение оружия установленного на боевых модулях осуществляется по средствам визуального контроля изображения получаемого оператором с камеры видеонаблюдения установленной на НРТК или непосредственно на корпусе или стволе оружия. В случае потери визуального контроля или управления НРТК при применении противником средств радиоэлектронной борьбы (РЭБ) или в следствие других причин выполнение боевой задачи может быть сорвано, а автоматический возврат НРТК в точку старта не возможен.
Таким образом, общим недостатком представленных выше технических решений является их низкая эффективность, обусловленная отсутствием возможности решения огневой задачи (наведение на цель и открытие огня) в автономном режиме и автоматического возврата НРТК в исходную точку (точку старта).
Известен мобильный робот и способ корректировки его курса (Патент RU №2210492 Опубл. 27.03.2003 г.). Данное техническое решение содержит устройство для перемещения мобильного робота по помещению, устройство для обнаружения наличия препятствия, управляющую часть, соединенную с устройством для перемещения мобильного робота и устройством для обнаружения препятствия и управляющую ими, устройство для определения текущего местоположения мобильного робота, соединенное с управляющей частью, и источник питания. Устройство для определения текущего местоположения мобильного робота содержит первую обзорную телекамеру для создания изображения потолка помещения и распознавания базового знака на потолке и первую видеоплату, обрабатывающую изображение, полученное с первой обзорной телекамеры, и передающую данные в управляющую часть. Источник питания соединен с управляющей частью и аккумулирует электроэнергию и питает устройство для перемещения мобильного робота, устройство для обнаружения препятствия, устройство для определения местоположения и управляющую часть. Устройство для обнаружения препятствия содержит линейный лазер для излучения линейного светового пучка по направлению к препятствию, вторую обзорную телекамеру для распознавания отраженного от препятствия линейного светового пучка и вторую видеоплату для обработки видеоданных, полученных второй телекамерой. Изобретение позволяет определять местоположение робота и корректировать его направление при обнаружении препятствия.
Недостатками данного устройства являются: плохая адаптация к изменяющимся условиям окружающей среды, ограниченность числа решаемых задач из-за узконаправленной комплектации и отсутствие внешнего наблюдения.
Из известных технических решений наиболее близким по совокупности существенных признаков к заявляемому способу является способ автоматического управления наземным робототехническим комплексом (Патент RU №2210492 Опубл. 20.08.2003 г.), включающий радиообмен между пультом управления и робототехническим комплексом, обеспечение ввода и обработку входной информации, поступающей от бортовых датчиков, вычисление текущей ориентации и местоположения робототехнического комплекса. При потере радиосвязи между пультом управления и робототехническим комплексом осуществляют его автоматический возврат в точку старта или в зону уверенного радиообмена по ранее пройденной траектории с корректировкой этой траектории в обход обнаруженных препятствий путем реализации на борту робототехнического комплекса базовых алгоритмов движения в заранее неизвестной обстановке по дальнометрическому изображению внешней среды с помощью навигационно-вычислительного блока.
Недостатком прототипа является его низкая эффективность, ввиду отсутствия возможности решения огневой задачи в автономном режиме, т.е. без участия оператора.
Техническим результатом заявляемого изобретения является устранение данного недостатка, а именно обеспечение возможности решения огневой задачи в автономном режиме.
Технический результат достигается тем, что НРТК оснащают модулем спутниковой навигации и магнитометром позволяющим определить дирекционный угол положения турели (направление ствола оружия), модулем сбора метеоданных в режиме реального времени позволяющим обеспечивать корректировку огня относительно погодных условий а также акустическим датчиком для распознавания звуков и IMU-сенсором представляющим собой совокупность трех устройств:
гироскопа, определяющий угловую скорость вокруг собственных осей X, Y, Z;
акселерометра, считывающий величину ускорения свободного падения по осям X, Y, Z;
компаса для вычисления углов между собственными осями сенсора X, Y, Z и силовыми линиями магнитного поля земли.
В пульт управления вводят алгоритм выполнения огневой задачи, а именно: задают координаты цели; дистанцию эффективного огня (зависит от применяемого оружия); координаты запасных позиций; порядок выполнения огневой задачи (вид боеприпасов и их расход, порядок смены огневых позиций); порядок возвращения в исходную точку; порядок действий в нештатных ситуациях.
При выходе на дистанцию эффективного огня наведение на цель (установка дирекционного угла и угла возвышения ствола) и открытие огня осуществляется автоматически. Установка дирекционного угла производится при помощи спутниковой навигации с точностью определения координат не ниже стандарта L5 (частотный диапазон 1163,95-1188,95) следующим образом. При движении НРТК производится мониторинг направления корпуса НРТК в пространстве. Ствол оружия установленного в турели НРТК в походном положении располагается параллельно оси симметрии корпуса. Таким образом, имея координаты НРТК (дирекционный угол ствола оружия установленного в турели) и координаты цели автоматически определяется направление стрельбы. В случае подавления спутникового сигнала установка дирекционного угла производится при помощи магнитометра. Угол возвышения оружия определяется автоматически, по эмпирическим зависимостям угла подъема ствола от дальности до цели, с учетом положения корпуса по данным IMU-сенсора, без участия оператора.
При выходе на позицию для ведения огня автоматически производится сканирование пространства лидаром (лазером) в направлении стрельбы во избежание попадания боеприпаса в препятствие (деревья, строения, технику).
При обнаружении лидаром (лазером) препятствия автоматически совершается обходной маневр и повторное сканирование пространства в направлении стрельбы. Так происходит до тех пор пока не будет выбрана беспрепятственная для стрельбы позиция.
В случае обстрела НРТК противником производится автоматическое принятие решения на смену огневых позиций (использование запасных огневых позиций). Решение о смене позиции в этом случае принимается при использовании показаний акустического датчика регистрирующего звуки выстрелов при обстреле НРТК.
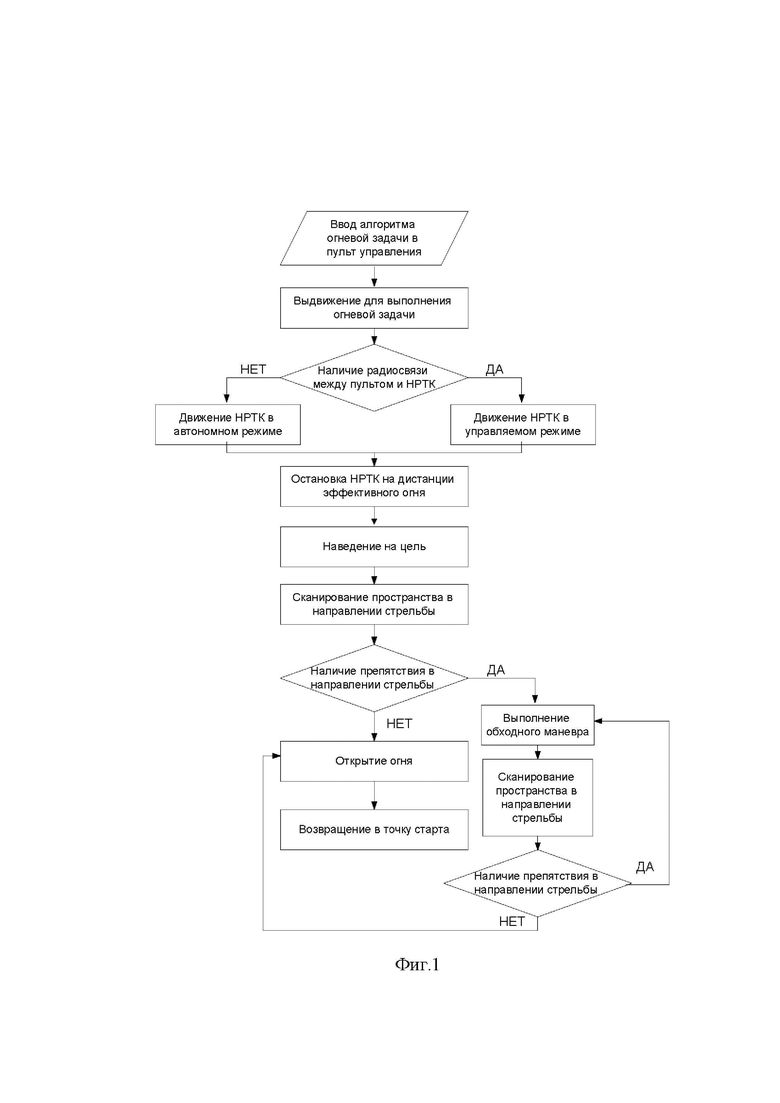
Предложение поясняется рисунком на котором представлен алгоритм реализации способа.
Реализация заявленного способа заключается в следующем.
При потере радиосвязи между пультом управления и робототехническим комплексом происходит переключение НРТК на работу в автоматическом режиме. При этом сохраняется спутниковый L5 сигнал позволяющий решать навигационные задачи, задачи топографической привязки НРТК и определения цели.
В виду того, что перед выполнением огневой задачи оператором введен алгоритм, а именно заданы координаты цели, дистанция эффективного огня, координаты запасных позиций, порядок выполнения огневой задачи, порядок возвращения в исходную точку, порядок действий в нештатных ситуациях при потере радиосвязи между пультом управления и робототехническим комплексом имеется возможность выполнять задачи в автономном режиме.
При подходе к линии ведения эффективного огня НРТК производит остановку и наведение на цель т.е. устанавливает дирекционный угол на цель и угол возвышения ствола используя спутниковые данные, данные IMU-сенсора и эмпирические зависимости, без участия оператора.
Далее производится сканирование пространства в направлении полосы огня во избежание попадания боеприпаса в препятствие (деревья, строения, технику).
В случае когда в направлении полосы огня имеются препятствия НРТК принимает решение на смену позиции, в этом случае совершается маневр (в сторону на расстояние достаточное для объезда препятствия) и снова сканируется местность в направлении огня (см. фиг. 1). Данные действия повторяются до тех пор, пока не будет выбрана беспрепятственная для стрельбы позиция. В случае когда в направлении полосы огня отсутствуют препятствия, производится стрельба по цели.
В случае обстрела НРТК противником производится смена позиции по приведенному выше алгоритму. Решение о смене позиции в этом случае принимается при использовании показаний акустического датчика регистрирующего звуки выстрелов при обстреле НРТК.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ НАВЕДЕНИЯ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОТАНКОВОГО РАКЕТНОГО КОМПЛЕКСА "ФАГОТ" | 2024 |
|
RU2834077C1 |
| ЭВАКУАЦИОННЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2023 |
|
RU2824684C1 |
Изобретение относится к способу решения огневой задачи дистанционно управляемым наземным робототехническим комплексом военного назначения (НРТК). Способ заключается в том, что перед выполнением огневой задачи оператор вводит в НРТК ее алгоритм, включающий задание координат цели, дистанции эффективного огня, координаты запасных позиций, порядок выполнения огневой задачи, порядок возвращения в исходную точку, порядок действий в нештатных ситуациях, а при потере радиосвязи между пультом управления и НРТК производится автоматическое управление движением робототехнического комплекса на основании полученных спутниковых данных и данных от IMU-сенсора, а также автоматическое наведение на цель, включающее установку дирекционного угла и угла возвышения ствола, при этом при выходе на позицию производится сканирование пространства в направлении стрельбы во избежание попадания боеприпаса в препятствия, закрывающие цель, а при обнаружении такого препятствия автоматически совершается обходной маневр и повторное сканирование пространства в направлении стрельбы до тех пор, пока НРТК не найдет выгодную для стрельбы позицию, а в случае обстрела НРТК противником на основании показаний акустических датчиков, регистрирующих звуки выстрелов, автоматически принимается решение на смену огневых позиций, а после выполнения задачи НРТК автоматически возвращается в точку старта. Обеспечивается возможность решения огневой задачи в автономном режиме. 1 ил.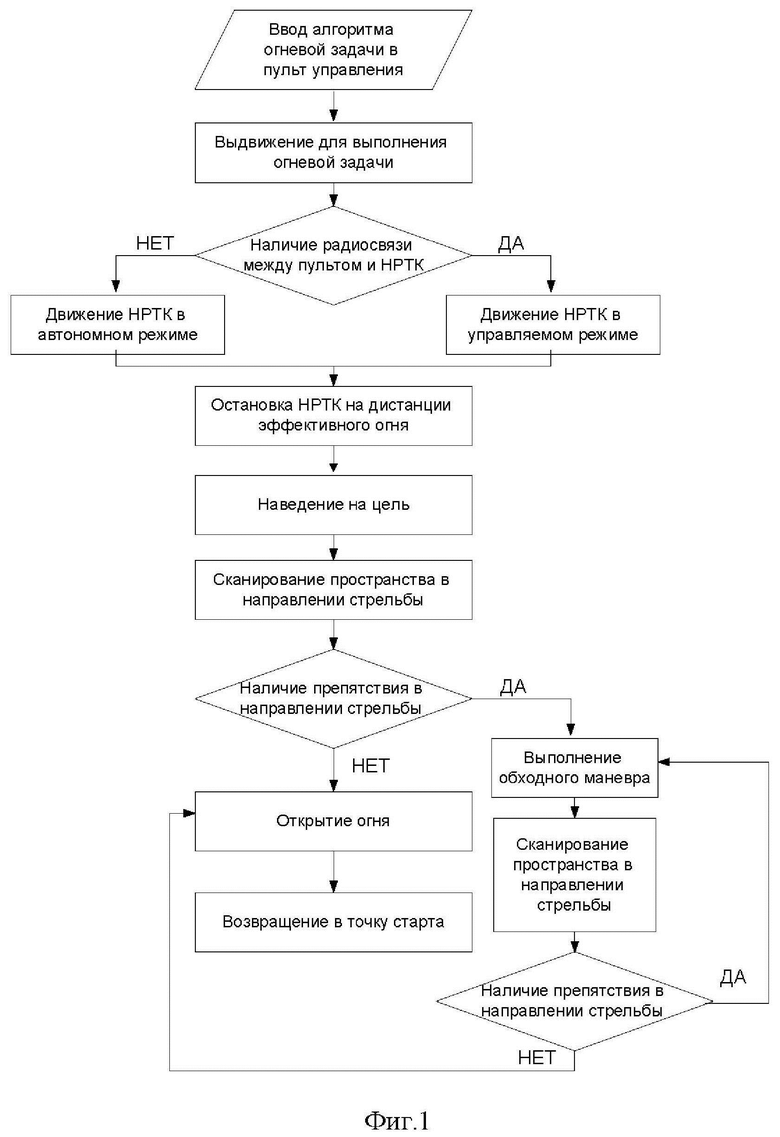
Способ решения огневой задачи дистанционно управляемым наземным робототехническим комплексом военного назначения (НРТК), заключающийся в том, что перед выполнением огневой задачи оператор вводит в НРТК ее алгоритм, включающий задание координат цели, дистанции эффективного огня, координаты запасных позиций, порядок выполнения огневой задачи, порядок возвращения в исходную точку, порядок действий в нештатных ситуациях, отличающийся тем, что при потере радиосвязи между пультом управления и НРТК производится автоматическое управление движением робототехнического комплекса на основании полученных спутниковых данных и данных от IMU-сенсора, а также автоматическое наведение на цель, включающее установку дирекционного угла и угла возвышения ствола, при этом при выходе на позицию производится сканирование пространства в направлении стрельбы во избежание попадания боеприпаса в препятствия, закрывающие цель, а при обнаружении такого препятствия автоматически совершается обходной маневр и повторное сканирование пространства в направлении стрельбы до тех пор, пока НРТК не найдет выгодную для стрельбы позицию, а в случае обстрела НРТК противником на основании показаний акустических датчиков, регистрирующих звуки выстрелов, автоматически принимается решение на смену огневых позиций, а после выполнения задачи НРТК автоматически возвращается в точку старта.
| Система управления ударного робототехнического комплекса военного назначения | 2022 |
|
RU2791949C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| Система управления многофункционального робототехнического комплекса обеспечения боевых действий | 2016 |
|
RU2652329C1 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| US 8301318 B2, 30.10.2012. | |||

