Изобретение относится к области радиолокации.
Известен способ радиолокационного обзора пространства, заключающийся в том, что плоская антенная решетка формирует основной «карандашный» луч с малым уровнем боковых лепестков, необходимый для измерения трех пространственных координат объекта. Безынерционное сканирование луча обеспечивается переключением несущей частоты. При этом пять разнесенных по частоте зондирующих импульсов, генерируемых передатчиком, создают пять перекрывающихся антенных лучей. Соответственно и отраженные эхо-сигналы обрабатываются в пяти приемных каналах приемника. Обзор зоны обзора по азимуту осуществляется за счет кругового вращения антенной решетки в азимутальной плоскости [1]. Недостатком этого способа является отсутствие использования априорных сведений и апостериорной информации, получаемой в процессе обзора, что приводит к иррациональному распределению энерговременных ресурсов по пространству зоны обзора и аппаратурной избыточности.
Наиболее близким по технической сущности и достигаемому положительному эффекту к заявляемому способу является радиолокационный обзор пространства способом на основе электронного сканирования диаграммы направленности на излучение и прием в угломестной плоскости и кругового вращения антенны в азимутальной плоскости [2]. Существо способа заключается в следующем. Плоская антенная решетка формирует основной «карандашный» луч - диаграмму направленности на излучение с малым уровнем боковых лепестков и диаграмму направленности на прием, обеспечивающие измерения трех пространственных координат объекта. В угломестной плоскости обеспечивается электронное сканирование диаграмм направленности на излучение и на прием по нескольким угловым направлениям. Отраженные эхо-сигналы обрабатываются в одном приемопередающем канале. Исходно, антенна и диаграммы направленности устанавливаются в начальное угловое направление и на начальном азимуте. В данное направление последовательно, с определенной частотой повторения, излучается серия импульсов. Период повторения зондирующих импульсов соответствует однозначному измерению расстояния до дальней границы зоны обзора. Прозондировав данное направление, антенна перемещается в следующее азимутальное направление и осуществляется такое же зондирование. Осуществляется зондирование всех азимутальных направлений зоны обзора на определенном угловом направлении, и затем диаграммы направленности антенны на излучение и прием перемещается в новое угловое направление. Процесс повторяется. Таким же образом осуществляется зондирование всех направлений зоны обзора за время, равное периоду обзора зоны обзора. Далее процесс обзора зоны повторяется.
Недостатками этого способа являются:
- большое время обзора зоны обзора либо низкие рабочие характеристики обнаружения малоразмерных объектов на дальней границе зоны обзора;
- неоднозначность определения дальности до объектов локации вследствие возможного использования повышенной частоты повторения зондирующих сигналов;
- недостаточные возможности по использованию имеющихся априорных сведений и апостериорной информации, получаемой в процессе обзора, в целях оптимизации распределения энерговременных ресурсов по пространству зоны обзора;
- ограниченные принципиальные возможности по обнаружению траекторий объектов, измерению их параметров и сопровождению объектов;
- недостаточные возможности по адаптации к фоноцелевой обстановке, путем использования данных межобзорной обработки, для управления режимами функционирования систем обработки информации и управления радиолокационной станцией.
Таким образом, основными недостатками прототипа являются: большое время обзора зоны обзора, либо низкие рабочие характеристики обнаружения малоразмерных объектов на дальней границе зоны обзора; неоднозначность определения дальности до объектов локации вследствие возможного использования повышенной частоты повторения зондирующих сигналов; недостаточные возможности по использованию имеющихся априорных сведений и апостериорной информации, получаемой в процессе обзора, в целях оптимизации распределения энерговременных ресурсов по пространству зоны обзора; ограниченные принципиальные возможности по обнаружению траекторий объектов, измерению их параметров и сопровождению объектов; недостаточные возможности по адаптации к фоноцелевой обстановке, путем использования данных межобзорной обработки, для управления режимами функционирования систем обработки информации и управления радиолокационной станцией.
Целью изобретения является оптимизация характеристик обнаружения малоразмерных объектов на дальней границе зоны обзора при том же времени обзора зоны обзора, либо сокращения времени обзора зоны обзора, устранения неоднозначности определения дальности до объектов локации вследствие возможного использования повышенной частоты повторения зондирующих сигналов, расширение функциональных возможностей по обнаружению траекторий объектов, измерению их траекторных параметров и мультипликативному сопровождению обнаруженных объектов, более полного и эффективного использования априорных сведений и апостериорной информации, получаемой в процессе осуществления радиолокационного обзора пространства, а в целом оптимизации распределения по пространству зоны обзора энерговременных ресурсов радиолокационной станции и расширения ее функциональных возможностей по адаптации к фоноцелевой обстановке.
Поставленная цель достигается тем, что в наземную трехкоординатную радиолокационную станцию кругового обзора, содержащую один, основной приемопередающий канал, осуществляющую известный способ радиолокационного обзора пространства [2], заключающийся в том, что плоская фазированная решетка формирует основной узкий «карандашный» луч - диаграмму направленности на излучение, с малым уровнем боковых лепестков и диаграмму направленности на прием отраженных сигналов, обеспечивающие измерение трех пространственных координат объекта, находящегося в зоне обзора, путем излучения в каждом положении диаграммы направленности коротких, простых зондирующих импульсов, при этом в угломестной плоскости осуществляется электронное безынерционное сканирование диаграмм направленности по угловым направлениям зоны обзора, а изменение азимутального направления диаграмм направленности осуществляется за счет кругового механического вращения фазированной антенной решетки в азимутальной плоскости, исходно диаграммы направленности устанавливаются в крайнем нижнем угловом направлении зоны обзора, а фазированная антенная решетка на определенном начальном азимутальном направлении зоны обзора, затем путем последовательного перемещения диаграмм направленности осуществляется излучение зондирующих сигналов и прием отраженных сигналов из всей зоны обзора, дополнительно введены второй приемный канал с электронно-управляемой в угломестной плоскости диаграммой направленности и приемный канал сопровождения, также с электронно-управляемой в угломестной плоскости диаграммой направленности, частота повторения зондирующих импульсов увеличивается в пять раз, при этом зона обзора в угломестной плоскости разбивается на пять угловых направлений, в каждом из которых, до дальней границы зоны обзора, находится последовательно пять дальностных сегментов, размер каждого из которых соответствует периоду повторения зондирующих импульсов, в исходном состоянии, с началом обзора зоны обзора, осуществляется излучение первого зондирующего импульса в первое - нижнее угловое направление зоны обзора и осуществляется прием отраженных сигналов из первого дальностного сегмента этого углового направления приемной диаграммой направленности основного приемного канала, излучение второго зондирующего импульса осуществляется в следующее, вышестоящее за первым, второе угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из второго дальностного сегмента первого углового направления и диаграммой направленности второго приемного канала из первого дальностного сегмента второго углового направления, третий зондирующий импульс излучается в вышестоящее за вторым - третье угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из третьего дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из второго дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из первого дальностного сегмента третьего углового направления, четвертый зондирующий импульс излучается в следующее, вышестоящее за третьим - четвертое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из четвертого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из третьего дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из второго дальностного сегмента третьего углового направления, пятый зондирующий импульс излучается в следующее, вышестоящее за четвертым - пятое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из пятого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из четвертого дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из третьего дальностного сегмента третьего углового направления, шестой зондирующий импульс излучается в первое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из третьего дальностного сегмента четвертого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из четвертого дальностного сегмента третьего углового направления, седьмой зондирующий импульс излучается во второе угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из четвертого дальностного сегмента четвертого углового направления, диаграммой направленности второго приемного канала из третьего дальностного сегмента пятого углового направления и диаграммой направленности канала сопровождения из пятого дальностного сегмента третьего углового направления, восьмой зондирующий импульс излучается в третье угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из третьего дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из четвертого дальностного сегмента пятого углового направления и диаграммой направленности канала сопровождения из пятого дальностного сегмента третьего углового направления, девятый зондирующий импульс излучается в четвертое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из четвертого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента пятого углового направления и диаграммой направленности канала сопровождения из первого дальностного сегмента четвертого углового направления, десятый зондирующий импульс излучается в пятое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из пятого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из первого дальностного сегмента пятого углового направления и диаграммой направленности канала сопровождения из второго дальностного сегмента четвертого углового направления, одиннадцатый зондирующий импульс излучается в первое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из первого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из второго дальностного сегмента пятого углового направления, далее зондирующие импульсы также последовательно циклически излучаются в вышеуказанные, с первого по пятое угловые направления, приемная диаграмма направленности основного приемного канала осуществляет прием отраженных сигналов, последовательно и циклически, из первого по пятый дальностных сегментов первого углового направления, диаграмма направленности второго приемного канала осуществляет прием отраженных сигналов из пятого дальностного сегмента последовательно циклически из второго, третьего, четвертого, пятого угловых направлений и выборочно: либо четвертого, либо третьего, либо второго, либо первого дальностных сегментов соответственно второго, третьего, четвертого, пятого угловых направлений, диаграмма направленности канала сопровождения осуществляет выборочно прием отраженных приходящих сигналов из первого по пятый сегментов дальности всех угловых направлений с целью более детального анализа принимаемых сигналов и сопровождения обнаруженных объектов, осуществив полный цикл зондирования на данном азимутальном направлении, диаграммы направленности каналов и фазированная антенная решетка перемещаются в следующее азимутальное направление, и цикл зондирования в угломестной плоскости зоны обзора повторяется, таким образом осуществляется первый - начальный обзор всей зоны обзора, а во втором и далее обзоре зоны, при необходимости, в зависимости от состояния фоноцелевой обстановки, возможно осуществление зондирования по углу места без предварительного приема сигналов из всех дальностных сегментов угловых направлений, а осуществляется сразу прием и анализ сигналов из пятого и выборочно, с первого по четвертый, дальностных сегментов второго, третьего, четвертого и пятого угловых направлений - диаграммой направленности второго приемного канала, с первого по пятый дальностных сегментов первого углового направления - диаграммой направленности основного приемного канала и выборочный анализ всех дальностных сегментов всех угловых направлений - диаграммой направленности канала сопровождения.
Предлагаемый способ радиолокационного обзора пространства состоит в следующем. Используется наземная трехкоординатная радиолокационная станция кругового обзора с плоской фазированной антенной решеткой, которая формирует узкий «карандашный» луч - диаграмму направленности на излучение, с малым уровнем боковых лепестков и диаграмму направленности на прием, обеспечивающую измерение трех пространственных координат объекта, находящегося в зоне обзора, путем излучения в каждое направление диаграмм направленности коротких простых зондирующих импульсов. Станция содержит основной приемопередающий канал с вышеуказанной игольчатой диаграммой направленности на излучение, электронно-управляемой в угломестной плоскости и приемной диаграммой направленности, обеспечивающей требуемое измерение координат и также электронно-управляемой в угломестной плоскости. Также станция содержит второй приемный канал и приемный канал сопровождения с такими же приемными диаграммами направленности, как и в основном приемопередающем канале и также электронно-управляемыми в угломестной плоскости. Изменение направлений диаграмм направленности по азимуту осуществляется за счет кругового механического вращения фазированной антенной решетки в азимутальной плоскости. Предлагаемый способ радиолокационного обзора пространства базируется на использовании априорных сведений о вероятностном распределении расстояния, на котором находятся малоразмерные объекты, в момент их обнаружения. Распределение данного расстояния в зоне обзора имеет характерный вид «барьерной зоны», в которой практически 100% осуществляется обнаружение и взятие на сопровождение, малоразмерных объектов, с заданной эффективной поверхностью рассеивания, при заданных энергетических параметрах станции и параметрах обзора зоны. Зная параметры этой барьерной зоны, можно всю зону обзора станции разбить на две зоны: зону обнаружения объектов и зону сопровождения объектов. Однако это не означает, что в зоне сопровождения невозможно обнаружение объектов. Это говорит только о том, что на основании имеющихся достоверных априорных сведений, в ходе обзора зоны, при обнаружении входящих в зону обзора объектов, главное внимание необходимо уделять именно «барьерной зоне», так как обнаружение осуществляется именно в ней и попасть в ближнюю зону обзора объекты, иначе как через барьерную зону, не могут. Но объекты обнаружения могут находиться в зоне обзора уже в момент начала обзора зоны. Поэтому при первом обзоре зоны нет априорной информации о наличии объектов в зоне обзора. Эту информацию могут предоставить апостериорные данные, полученные в процессе первого или начальных обзоров зоны обзора. Далее особое внимание в зоне сопровождения можно уделять только особым аномальным фрагментам, осуществляя в них более детальный анализ с целью обнаружения. Следовательно, в данном случае осуществляется двухпороговое обнаружение, с первым грубым «порогом» - простой обработкой и вторым более низким «порогом» - детальной обработкой. С целью оптимизации энерговременных ресурсов в данном случае можно использовать процедуры последовательного анализа. Реализовать разбиение зоны обзора на барьерную зону и зону сопровождения можно на основе повышенной частоты повторения зондирующих сигналов и пространственной манипуляцией диаграммы направленности на излучение и трех приемных диаграмм направленности, с соответствующими приемными каналами и электронным сканированием всех диаграмм направленности в угломестной плоскости. Такой минимальный состав: один приемопередающий канал и два дополнительных приемных канала позволяют исключить неоднозначность измерения дальности вследствие повышенной частоты повторения импульсов, осуществить за требуемое время полный обзор зоны обзора на начальном этапе и осуществлять за сокращенное время, без ухудшения характеристик обнаружения, дальнейший обзор зоны обзора, адаптивно оптимизируя распределение энерговременных ресурсов станции по пространству. Если дальность до дальней границы зоны обзора равна 350 км, и ей соответствует частота повторения зондирующих сигналов с однозначным измерением дальности, то увеличение частоты повторения в пять раз уменьшит дальность однозначного измерения в пять раз, и эта дальность составит 70 км. Следовательно, чтобы до дальней границы зоны обзора обеспечивалось однозначное измерение дальности, необходимо чтобы в каждое угловое направление осуществлялось излучение каждого шестого зондирующего импульса. А вся зона обзора разбивается на пять дальностных сегментов по 70 км. С каждого углового направления в каждый момент времени приходят отраженные сигналы, соответствующие разным дальностным сегментам. В первый, или первые начальные обзоры, необходимо осуществить анализ информации, приходящей из всех дальностных сегментов всех угловых направлений зоны обзора. Это требование реализуется следующим образом. Зона обзора в угломестной плоскости разбивается на пять угловых направлений. В исходном состоянии, с началом обзора зоны обзора, осуществляется излучение первого зондирующего импульса в первое - нижнее угловое направление зоны обзора и осуществляется прием отраженных сигналов из первого дальностного сегмента этого углового направления приемной диаграммой направленности основного приемного канала. Излучение второго зондирующего импульса осуществляется в следующее, вышестоящее за первым, второе угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из второго дальностного сегмента первого углового направления и диаграммой направленности второго приемного канала из первого дальностного сегмента второго углового направления. Третий зондирующий импульс излучается в вышестоящее за вторым - третье угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из третьего дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из второго дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из первого дальностного сегмента третьего углового направления. Четвертый зондирующий импульс излучается в следующее, вышестоящее за третьим - четвертое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из четвертого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из третьего дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из второго дальностного сегмента третьего углового направления. Пятый зондирующий импульс излучается в следующее, вышестоящее за четвертым - пятое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из пятого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из четвертого дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из третьего дальностного сегмента третьего углового направления. Шестой зондирующий импульс излучается в первое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из третьего дальностного сегмента четвертого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из четвертого дальностного сегмента третьего углового направления. Седьмой зондирующий импульс излучается во второе угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из четвертого дальностного сегмента четвертого углового направления, диаграммой направленности второго приемного канала из третьего дальностного сегмента пятого углового направления и диаграммой направленности канала сопровождения из пятого дальностного сегмента третьего углового направления. Восьмой зондирующий импульс излучается в третье угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из третьего дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из четвертого дальностного сегмента пятого углового направления и диаграммой направленности канала сопровождения из пятого дальностного сегмента третьего углового направления. Девятый зондирующий импульс излучается в четвертое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из четвертого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента пятого углового направления и диаграммой направленности канала сопровождения из первого дальностного сегмента четвертого углового направления. Десятый зондирующий импульс излучается в пятое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из пятого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из первого дальностного сегмента пятого углового направления и диаграммой направленности канала сопровождения из второго дальностного сегмента четвертого углового направления. Одиннадцатый зондирующий импульс излучается в первое угловое направление, и прием отраженных сигналов осуществляется приемной диаграммой направленности основного приемного канала из первого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента второго углового направления и диаграммой направленности канала сопровождения из второго дальностного сегмента пятого углового направления. Далее зондирующие импульсы также последовательно циклически излучаются в вышеуказанные, с первого по пятое угловые направления. Приемная диаграмма направленности основного приемного канала осуществляет прием отраженных сигналов, последовательно и циклически, из первого по пятый дальностных сегментов первого углового направления, диаграмма направленности второго приемного канала осуществляет прием отраженных сигналов из пятого дальностного сегмента последовательно циклически из второго, третьего, четвертого, пятого угловых направлений и выборочно: либо четвертого, либо третьего, либо второго, либо первого дальностных сегментов соответственно второго, третьего, четвертого, пятого угловых направлений, диаграмма направленности канала сопровождения осуществляет выборочно прием отраженных приходящих сигналов из первого по пятый сегментов дальности всех угловых направлений с целью более детального анализа принимаемых сигналов и сопровождения обнаруженных объектов. Осуществив полный цикл зондирования на данном азимутальном направлении, диаграммы направленности каналов и фазированная антенная решетка перемещаются в следующее азимутальное направление, и цикл зондирования в угломестной плоскости зоны обзора повторяется. Таким образом, осуществляется первый - начальный обзор всей зоны обзора, а во втором и далее обзоре зоны при необходимости в зависимости от состояния фоноцелевой обстановки возможно осуществление зондирования по углу места без предварительного приема сигналов из всех дальностных сегментов угловых направлений, а осуществляется сразу прием и анализ сигналов из пятого и выборочно, с первого по четвертый, дальностных сегментов второго, третьего, четвертого и пятого угловых направлений - диаграммой направленности второго приемного канала, с первого по пятый, дальностных сегментов первого углового направления - диаграммой направленности основного приемного канала и выборочный анализ всех дальностных сегментов всех угловых направлений - диаграммой направленности канала сопровождения.
Для реализации предлагаемого способа радиолокационного обзора пространства предлагается устройство, которое отличается от устройства, используемого в «Способе радиолокационного обзора пространства» - прототипе [3]. Устройство прототипа не позволяет оптимизировать распределение энерговременных ресурсов станции по пространству зоны обзора. Также недостатком устройства прототипа является то, что хотя и возможно электронное управление диаграммами направленности на излучение и на прием, но устранить неоднозначность измерения дальности при повышенной частоте повторения зондирующих импульсов это не позволяет, и уменьшить время обзора зоны обзора без ухудшения качества обнаружения и сопровождения объектов не представляется возможным. Кроме этого, у прототипа недостаточные возможности по адаптации к фоноцелевой обстановке, путем использования данных межобзорной обработки, для управления режимами функционирования систем обработки информации и управления радиолокационной станцией.
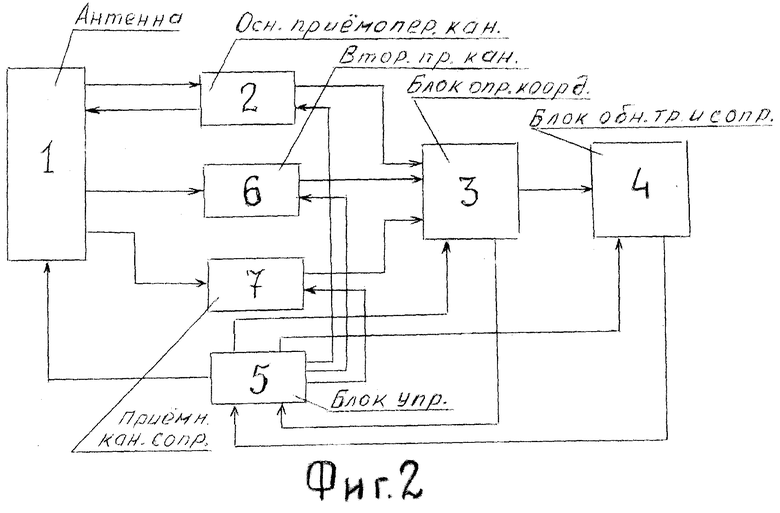
С целью устранения указанных недостатков и реализации предлагаемого способа радиолокационного обзора пространства предлагается устройство, содержащее антенну, основной приемопередающий канал, блок определения координат, блок обнаружения траекторий и сопровождения, блок управления, при этом первый выход антенны соединен с первым входом основного приемопередающего канала, первый вход антенны соединен с первым выходом основного приемопередающего канала, второй вход антенны соединен с первым выходом блока управления, второй вход основного приемопередающего канала соединен со вторым выходом блока управления, второй выход основного приемопередающего канала соединен с первым входом блока определения координат, второй вход которого соединен с третьим выходом блока управления, первый выход блока определения координат соединен с первым входом блока управления, второй выход блока определения координат соединен с первым входом блока обнаружения траекторий и сопровождения, второй вход которого соединен с четвертым выходом блока управления, а выход соединен со вторым входом блока управления, отличающееся тем, что дополнительно введены второй приемный канал и приемный канал сопровождения, при этом первый вход второго приемного канала соединен со вторым выходом антенны, а второй вход соединен с пятым выходом блока управления, выход второго приемного канала соединен с третьим входом блока определения координат, первый вход приемного канала сопровождения соединен с третьим выходом антенны, второй вход приемного канала сопровождения соединен с шестым выходом блока управления, а выход приемного канала сопровождения соединен с четвертым входом блока определения координат.
На Фиг.1 представлена зона обзора в угломестной плоскости с обозначением барьерной зоны обнаружения, объектов обнаружения и сопровождения, зондируемых угловых направлений, указанием дальностных сегментов и диаграмм направленности приемных каналов.
На Фиг.2 представлена блок-схема устройства, реализующего предлагаемый способ радиолокационного обзора пространства.
Устройство реализации способа радиолокационного обзора пространства - Фиг.2 содержит: антенну 1, основной приемопередающий канал 2, блок определения координат 3, блок обнаружения траекторий и сопровождения 4, блок управления 5, второй приемный канал 6, приемный канал сопровождения 7.
Устройство работает следующим образом. Антенна 1 представляет собой фазированную антенную решетку, которая формирует игольчатую диаграмму направленности на излучение и диаграммы направленности приемных каналов, которые с помощью электронно-управляемых фазовращателей безынерционно управляются в угломестной плоскости, а изменение их азимутального направления осуществляется за счет механического кругового вращения фазированной антенной решетки в азимутальной плоскости. Исходно при начальном обзоре зоны обзора информация о наличии объектов в зоне обзора может отсутствовать, и необходимо осуществить зондирование и анализ всех разрешаемых элементов зоны обзора. В начальном азимутальном направлении антенна 1 формирует диаграмму направленности на излучение. Ее формирование и управление в угломестной плоскости обеспечивает блок управления 5. Диаграмма направленности на излучение устанавливается в первое - нижнее угловое направление. Приемопередающий канал 2 обеспечивает выработку коротких простых зондирующих импульсов. Частота повторения зондирующих сигналов увеличена в 5 раз по отношению к частоте повторения зондирующих сигналов, обеспечивающей однозначное измерение дальности до дальней границы зоны обнаружения - Добн. При этом все расстояние до дальней границы зоны обнаружения можно представить в виде пяти дальностных сегментов: a; b; c; d; e - Фиг.1, размер каждого из которых равен Добн./5. Зондирование зоны обзора осуществляется по пяти угловым направлениям. После излучения первого зондирующего импульса прием отраженных сигналов осуществляется приемной диаграммой направленности приемного канала основного приемопередающего канала 2 из первого дальностного сегмента - a первого углового направления. Излучение второго зондирующего импульса осуществляется в следующее, вышестоящее за первым, второе угловое направление. В это время первый зондирующий импульс находится в начале второго дальностного сегмента - b первого углового направления. Прием отраженных сигналов осуществляется приемной диаграммой направленности приемного канала основного приемо-передающего канала 2 из второго дальностного сегмента - b первого углового направления и диаграммой направленности второго приемного канала 6 из первого дальностного сегмента - a второго углового направления. Третий зондирующий импульс излучается в следующее, вышестоящее за вторым, третье угловое направление. В это время первый зондирующий импульс находится в начале третьего дальностного сегмента - c первого углового направления, второй зондирующий импульс находится в начале второго дальностного сегмента - b второго углового направления. Прием отраженных сигналов осуществляется приемной диаграммой направленности приемного канала основного приемопередающего канала 2 из третьего дальностного сегмента - c первого углового направления, диаграммой направленности второго приемного канала 6 из второго дальностного сегмента - b второго углового направления и диаграммой направленности приемного канала сопровождения 7 из первого дальностного сегмента - a третьего углового направления. Четвертый зондирующий импульс диаграммой направленности на излучение и передающим каналом основного приемопередающего канала 2, излучается в следующее, вышестоящее за третьим, четвертое угловое направление. В это время первый зондирующий импульс находится в начале четвертого дальностного сегмента - d первого углового направления, второй зондирующий импульс находится в начале третьего дальностного сегмента - c второго углового направления, третий зондирующий импульс находится в начале второго дальностного сегмента - b третьего углового направления. Прием отраженных сигналов осуществляется приемной диаграммой направленности приемного канала основного приемопередающего канала 2 из четвертого дальностного сегмента - d первого углового направления, диаграммой направленности второго приемного канала 6 из третьего дальностного сегмента - c второго углового направления и диаграммой направленности приемного канала сопровождения 7 из второго дальностного сегмента - b третьего углового направления. Пятый зондирующий импульс излучается в следующее, вышестоящее за четвертым, пятое угловое направление. В это время первый зондирующий импульс находится в начале пятого дальностного сегмента - e первого углового направления, второй зондирующий импульс находится в начале четвертого дальностного сегмента - d второго углового направления, третий зондирующий импульс находится в начале третьего дальностного сегмента - c третьего углового направления, четвертый зондирующий импульс находится в начале второго дальностного сегмента - b четвертого углового направления. Прием отраженных сигналов осуществляется приемной диаграммой направленности приемного канала основного приемопередающего канала 2 из пятого дальностного сегмента - e первого углового направления, диаграммой направленности второго приемного канала 6 из четвертого дальностного сегмента - d второго углового направления и диаграммой направленности приемного канала сопровождения 7 из третьего дальностного сегмента - c третьего углового направления. Шестой зондирующий импульс излучается опять в первое угловое направление. В это время первый зондирующий импульс находится уже за пределами зоны обзора. Далее аналогично, таким же образом, циклически, последовательно осуществляется излучение зондирующих импульсов диаграммой направленности на излучение и передающим каналом основного приемопередающего канала 2, с первого по пятое угловые направления. Прием отраженных сигналов осуществляется на основе манипулирования приемными диаграммами направленности основного приемопередающего канала 2, второго приемного канала 6 и приемного канала сопровождения 7 в соответствии с последовательностью, соответствующей предлагаемому способу радиолокационного обзора пространства. Управление диаграммами направленности и основным приемопередающим каналом 2, вторым приемным каналом 6, приемным каналом сопровождения 7 осуществляется блоком управления 5 на основе алгоритма коммутации, соответствующего вышерассмотренному предлагаемому способу радиолокационного обзора пространства. В процессе первого или начальных периодов обзора зоны обзора осуществляется анализ приходящих сигналов из всех разрешаемых элементов зоны обзора. В ходе обработки сигнальной информации в блоке определения координат 3 и межобзорной обработки в блоке обнаружения траекторий и сопровождения 4 осуществляются анализ и оценка фоноцелевой обстановки в зоне обзора и таким образом формируется апостериорная информация, которая далее используется в блоке управления 5 для адаптивного управления диаграммой направленности на излучение, излучением зондирующих сигналов передающим каналом основного приемопередающего канала 2, диаграммой направленности приемного канала сопровождения 7, диаграммой направленности второго приемного канала 6, параметрами и структурой приемных каналов, параметрами и алгоритмами обработки блока определения координат 3 и блока обнаружения траекторий и сопровождения 4.
Таким образом, устройство для осуществления предлагаемого способа радиолокационного обзора пространства позволяет осуществлять обзор зоны обзора и обнаружение находящихся в ней объектов без необходимости предварительного целеуказания, за требуемое время и с требуемым качеством. Функциональные возможности по анализу фоноцелевой обстановки и адаптации к ней существенно расширяются. По отношению к аналогичным многоканальным устройствам для осуществления радиолокационного обзора пространства осуществляется значительное сокращение аппаратурного состава, упрощается общая структура и расширяются возможности по адаптации к фоноцелевой обстановке и оптимизации энерговременного потенциала локационной системы в процессе накопления апостериорной информации.
Источники информации
1. «Зарубежная радиоэлектроника» №7, 1983, М., (стр.30, Рис.1).
2. Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Сов. радио, 1978 (стр.186, Рис.6.1б).
3. Сунаяма М., Мияути Х. Последние достижения в обработке сигналов радиолокационных станций. "Дэнси цусин гаккайси", т.66, №10, стр.1052-1059, 1983 (Рис.2).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Способ обзора пространства | 2015 |
|
RU2610833C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| Способ обзора пространства | 2016 |
|
RU2621680C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ | 1998 |
|
RU2127437C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| СПОСОБ АДАПТИВНОГО ОБЗОРА ЗОНЫ ДЕЙСТВИЯ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2018 |
|
RU2701377C1 |
| Способ обзора пространства | 2021 |
|
RU2765873C1 |

Изобретение относится к области радиолокации. Достигаемый технический результат - оптимизация характеристик обнаружения малоразмерных объектов на дальней границе зоны обзора при том же времени обзора зоны обзора, сокращение времени обзора зоны обзора, устранение неоднозначности определения дальности до объектов локации, расширение функциональных возможностей по обнаружению траекторий объектов, измерение их траекторных параметров и мультипликативное сопровождение обнаруженных объектов, более полное и эффективное использование априорных сведений и апостериорной информации, получаемой в процессе осуществления радиолокационного обзора пространства, а в целом оптимизация распределения по пространству зоны обзора энерговременных ресурсов радиолокационной станции и расширение ее функциональных возможностей по адаптации к фоноцелевой обстановке при рациональной технической организации. Указанный результат достигается путем повышения частоты повторения зондирующих сигналов, определенным порядком комбинирования в угломестной плоскости диаграмм направленности на излучение и прием, использованием априорных сведений и апостериорной информации, получаемой в процессе обзора, вследствие чего зона обзора разбивается на барьерную зону обнаружения и зону сопровождения. 2 н.п. ф-лы, 2 ил.
1. Способ радиолокационного обзора пространства наземной трехкоординатной радиолокационной станцией кругового обзора, содержащей один основной приемопередающий канал, заключающийся в том, что плоская фазированная решетка формирует основной узкий «карандашный» луч - диаграмму направленности на излучение, с малым уровнем боковых лепестков, и диаграмму направленности на прием отраженных сигналов, обеспечивающие измерение трех пространственных координат объекта, находящегося в зоне обзора, путем излучения в каждом положении диаграммы направленности зондирующих импульсов, при этом в угломестной плоскости осуществляется электронное безынерционное сканирование диаграмм направленности по угловым направлениям зоны обзора, а изменение азимутального направления диаграмм направленности осуществляется за счет кругового механического вращения фазированной антенной решетки в азимутальной плоскости, исходно диаграммы направленности устанавливают в крайнем нижнем угловом направлении зоны обзора, а фазированная антенная решетка находится на определенном начальном азимутальном направлении зоны обзора, затем путем последовательного перемещения диаграмм направленности осуществляют излучение зондирующих сигналов и прием отраженных сигналов из всей зоны обзора, отличающийся тем, что дополнительно вводят второй приемный канал с электронно-управляемой в угломестной плоскости диаграммой направленности и приемный канал сопровождения, также с электронно-управляемой в угломестной плоскости диаграммой направленности, частоту повторения зондирующих импульсов увеличивают в пять раз, при этом зона обзора в угломестной плоскости разбивается на пять угловых направлений, в каждом из которых до дальней границы зоны обзора находится последовательно пять дальностных сегментов, размер каждого из которых соответствует периоду повторения зондирующих импульсов, в исходном состоянии, с началом обзора зоны обзора, осуществляют излучение первого зондирующего импульса в первое нижнее угловое направление зоны обзора и осуществлют прием отраженных сигналов из первого дальностного сегмента этого углового направления приемной диаграммой направленности основного приемопередающего канала, излучение второго зондирующего импульса осуществляют в следующее, вышестоящее за первым второе угловое направление, и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из второго дальностного сегмента первого углового направления и диаграммой направленности второго приемного канала из первого дальностного сегмента второго углового направления, третий зондирующий импульс излучают в вышестоящее за вторым третье угловое направление, и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из третьего дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из второго дальностного сегмента второго углового направления и диаграммой направленности приемного канала сопровождения из первого дальностного сегмента третьего углового направления, четвертый зондирующий импульс излучают в следующее, вышестоящее за третьим четвертое угловое направление, и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из четвертого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из третьего дальностного сегмента второго углового направления и диаграммой направленности приемного канала сопровождения из второго дальностного сегмента третьего углового направления, пятый зондирующий импульс излучают в следующее, вышестоящее за четвертым пятое угловое направление, и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из пятого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из четвертого дальностного сегмента второго углового направления и диаграммой направленности приемного канала сопровождения из третьего дальностного сегмента третьего углового направления, шестой зондирующий импульс излучают в первое угловое направление, и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из третьего дальностного сегмента четвертого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента второго углового направления и диаграммой направленности приемного канала сопровождения из четвертого дальностного сегмента третьего углового направления, седьмой зондирующий импульс излучают во второе угловое направление и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из четвертого дальностного сегмента четвертого углового направления, диаграммой направленности второго приемного канала из третьего дальностного сегмента пятого углового направления и диаграммой направленности приемного канала сопровождения из пятого дальностного сегмента третьего углового направления, восьмой зондирующий импульс излучают в третье угловое направление и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из третьего дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из четвертого дальностного сегмента пятого углового направления и диаграммой направленности приемного канала сопровождения из пятого дальностного сегмента третьего углового направления, девятый зондирующий импульс излучают в четвертое угловое направление и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из четвертого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента пятого углового направления и диаграммой направленности приемного канала сопровождения из первого дальностного сегмента четвертого углового направления, десятый зондирующий импульс излучают в пятое угловое направление и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из пятого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из первого дальностного сегмента пятого углового направления и диаграммой направленности приемного канала сопровождения из второго дальностного сегмента четвертого углового направления, одиннадцатый зондирующий импульс излучают в первое угловое направление и прием отраженных сигналов осуществляют приемной диаграммой направленности основного приемопередающего канала из первого дальностного сегмента первого углового направления, диаграммой направленности второго приемного канала из пятого дальностного сегмента второго углового направления и диаграммой направленности приемного канала сопровождения из второго дальностного сегмента пятого углового направления, далее зондирующие импульсы также последовательно циклически излучают в вышеуказанные с первого по пятое угловые направления, приемной диаграммой направленности основного приемопередающего канала осуществляют прием отраженных сигналов последовательно и циклически из первого по пятый дальностных сегментов первого углового направления, диаграммой направленности второго приемного канала осуществляют прием отраженных сигналов из пятого дальностного сегмента последовательно циклически из второго, третьего, четвертого, пятого угловых направлений и выборочно либо четвертого, либо третьего, либо второго, либо первого дальностных сегментов соответственно второго, третьего, четвертого, пятого угловых направлений, диаграммой направленности приемного канала сопровождения осуществляют выборочно прием отраженных приходящих сигналов из первого по пятый сегментов дальности всех угловых направлений, осуществив полный цикл зондирования на данном азимутальном направлении, диаграммы направленности каналов и фазированную антенную решетку перемещают в следующее азимутальное направление и цикл зондирования в угломестной плоскости зоны обзора повторяют, таким образом осуществляется первый начальный обзор всей зоны обзора, а во втором и далее обзоре зоны в зависимости от фоноцелевой обстановки осуществляют зондирования по углу места без предварительного приема сигналов из всех дальностных сегментов угловых направлений, а осуществляется прием и анализ сигналов из пятого и выборочно с первого по четвертый дальностных сегментов второго, третьего, четвертого и пятого угловых направлений - диаграммой направленности второго приемного канала, с первого по пятый дальностных сегментов первого углового направления - диаграммой направленности основного приемопередающего канала и выборочный анализ всех дальностных сегментов всех угловых направлений - диаграммой направленности приемного канала сопровождения.
2. Устройство для осуществления способа по п.1, содержащее антенну, основной приемопередающий канал, блок определения координат, блок обнаружения траекторий и сопровождения, блок управления, при этом первый выход антенны соединен с первым входом основного приемопередающего канала, первый вход антенны соединен с первым выходом основного приемопередающего канала, второй вход антенны соединен с первым выходом блока управления, второй вход основного приемопередающего канала соединен со вторым выходом блока управления, второй выход основного приемопередающего канала соединен с первым входом блока определения координат, второй вход которого соединен с третьим выходом блока управления, первый выход блока определения координат соединен с первым входом блока управления, второй выход блока определения координат соединен с первым входом блока обнаружения траекторий и сопровождения, второй вход которого соединен с четвертым выходом блока управления, а выход соединен со вторым входом блока управления, отличающееся тем, что дополнительно введены второй приемный канал и приемный канал сопровождения, при этом первый вход второго приемного канала соединен со вторым выходом антенны, а второй вход соединен с пятым выходом блока управления, выход второго приемного канала соединен с третьим входом блока определения координат, первый вход приемного канала сопровождения соединен с третьим выходом антенны, второй вход приемного канала сопровождения соединен с шестым выходом блока управления, а выход приемного канала сопровождения соединен с четвертым входом блока определения координат.
| Теоретические основы радиолокации | |||
| /Под ред | |||
| В.Е | |||
| Дулевича | |||
| - М.: Советское радио, 1978, с.186, рис.6.1б | |||
| Затвор для гидротехнических сооружений | 1933 |
|
SU35688A1 |
| КОРАБЕЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ И АНТЕННОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2003 |
|
RU2254593C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА ЦЕЛЕЙ ПРИ НАЛИЧИИ ОТРАЖЕНИЙ ПРИНИМАЕМОГО ЭХОСИГНАЛА ОТ ЗЕМНОЙ ПОВЕРХНОСТИ И ИМПУЛЬСНАЯ НАЗЕМНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291464C2 |
| US 5138322 А, 11.08.1992 | |||
| WO 2007011458 A2, 25.01.2007 | |||
| US 2007164897 A1, 19.07.2007. | |||

