Изобретение относится к железнодорожному транспорту и обеспечивает повышенную оперативность поездной бригады при поиске подвижной единицы с нарушенным нижним габаритом.
Известно устройство контроля схода подвижного состава (УКСПС) (патент РФ №2279369, B61L 23/26, 2006 г.), контролирующее нижний габарит подвижных единиц и дающее информацию о нарушении габарита, в том числе и о сходе единицы с рельс. Устройство представляет собой перемычки и поперечины, установленные на железнодорожном пути, целостность которых нарушается под действием негабаритных элементов подвижной единицы. Информация о нарушении поступает в диспетчерский пункт. Поиск негабаритной единицы производится локомотивной бригадой. Но система обладает низкой оперативностью, поскольку датчик не предоставляет информацию о порядковом номере вагона и его общем виде, и поэтому осмотр вагонов занимает длительное время. Кроме того, имеют место ситуации срабатывания датчика УКСПС по каким-либо другим причинам, не связанным с прохождением железнодорожного состава, в результате чего ситуация становится неопределенной, требующей дополнительной проверки и выяснения причины срабатывания датчика.
Известны системы счета осей колесных пар. Но данные системы не позволяют выявить подвижную единицу с нарушением нижнего габарита и не представляют информацию об общем виде проходящих подвижных единиц. Кроме того, системы предполагают установку как минимум двух колесных датчиков, разнесенных на большие расстояния (например, система полуавтоматической блокировки с датчиками ДПЭП-М ЗАО «ВНТЦ «Уралжелдоравтоматизация». См. журнал «Промышленный транспорт Урала» №9, 2007 г., стр.30.
Также известны способы идентификации подвижных единиц железнодорожного состава, основанные на облучении радиосигналом пассивной метки, установленной на единице, и фиксации отраженной волны (например, патент США №4739328). Но данные системы сложны в конструктивном отношении и требуют установки меток на все существующие и вновь выпускаемые подвижные единицы.
Известен способ видеонаблюдения за железнодорожным составом (заявка №95113376 от 28.07.1995 г. на патент РФ), но этот способ не позволяет с достаточной надежностью выявить подвижную единицу с нарушенным нижним габаритом.
В наибольшей мере предлагаемому решению соответствует устройство, реализующее способ идентификации подвижных единиц железнодорожного транспорта (патент РФ №2280580, B61L 25/02, 2006 г.), в котором используются два путевых колесных датчика, находящихся на фиксированном расстоянии друг от друга, меньше чем минимальное расстояние между внутренними колесными парами подвижной единицы, таймер временных отметок, привязывающий временную систему отсчета к движущемуся составу. В результате работы системы определяются межосевые расстояния подвижных единиц, которые сравниваются с данными по структуре межосевых расстояний колесных пар, предварительно занесенными в память аппаратных средств.
Задачей, на которое направлено предлагаемое изобретение, является повышение оперативности поиска подвижной единицы с нарушенным нижним габаритом, повышение информативности данных о подвижной единице.
Поставленная цель достигается тем, что в устройстве контроля схода подвижного состава, содержащем перемычки и поперечины, установленные на пути и контролирующие нижний габарит состава, путевой датчик, таймер, видеорегистратор, сообщенные со счетно-решающим устройством, имеющим возможность передавать информацию на средство связи с диспетчерским пунктом, согласно изобретению путевой датчик установлен на конструктивно минимально возможном расстоянии от перемычек и поперечин, а видеорегистратор установлен на расстоянии и под углом от перемычек и поперечин, при которых впоследствии по его записи возможно невооруженным глазом определение типа подвижных единиц и отмеченного места их негабаритности с точностью, достаточной для наибыстрейшего ее поиска, кроме того, устройство снабжено отметчиком моментов времени поступления сигналов о прохождении колесных пар над путевым датчиком, сообщенным с путевым датчиком, счетно-решающим устройством и таймером, и отметчиком меток, сообщенным с путевым датчиком, видеорегистратором и счетно-решающим устройством, для нанесения меток негабаритной подвижной единицы в память счетно-решающего устройства и в материалы видеонаблюдения, а алгоритм идентификации подвижных единиц счетно-решающим устройством с помощью данных меток имеет возможность учитывать динамические характеристики и для, например, четырехосного вагона основан на формуле

где S - расстояние между первой и последней осью вагона;
s1 - расстояние между осями первой тележки;
t1 - интервал времени прохождения над педалью первой и второй осей первой тележки;
t2 - интервал времени прохождения над педалью первой и второй осей второй тележки;
Т - время прохождения над педалью несущей платформы вагона, определенное по разнице текущего времени с момента прохождения первой оси и последней;
 - скорость движения состава над педалью в момент времени прохождения первой тележки вагона;
- скорость движения состава над педалью в момент времени прохождения первой тележки вагона;
 - скорость движения состава над педалью в момент времени прохождения последней тележки вагона.
- скорость движения состава над педалью в момент времени прохождения последней тележки вагона.
Отличительными признаками предложенного технического решения по сравнению с аналогичными являются:
- установка в непосредственной близости друг от друга датчика устройства контроля схода подвижного состава, путевого датчика и устройства видеонаблюдения;
- введение в систему специального отметчика, соединенного с таймером, позволяет измерять и производить отметку моментов времени прохождения над путевым датчиком колесных пар, а в прототипе измеряются промежутки времени прохождения известного расстояния колесными парами;
- введение отметчика, производящего отметку подвижной единицы с нарушенными габаритами в памяти счетно-решающего устройства, в материалах видеонаблюдения.
- обеспечение сигнализацией диспетчерского пункта о номере подвижной единицы с нарушенными габаритами.
Обеспечивается повышенная информативность, поскольку кроме межосевых расстояний, которые используются в прототипе для идентификации единиц, в устройстве идентификация производится по соотношению межосевых расстояний в подвижной единице, а кроме того, определяются и используются при идентификации динамические параметры единиц. Также, при дальнейшей разработке могут быть учтены соотношения между сцепками подвижных единиц и жесткости пружин самих сцепок.
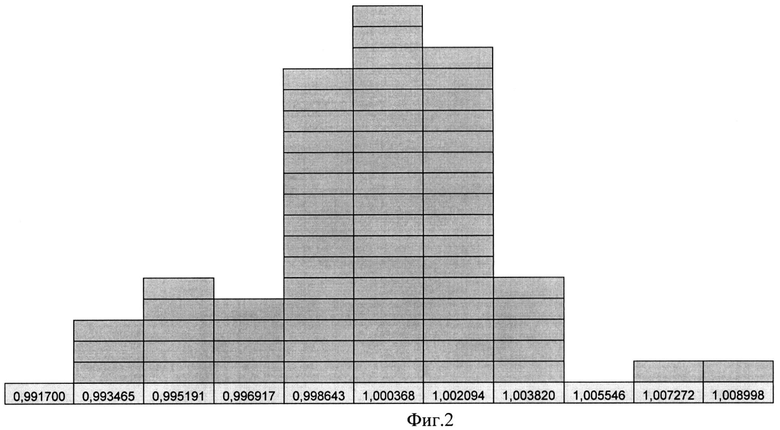
Изобретение иллюстрируется чертежом, где на фиг.1 представлено устройство контроля схода подвижного состава (структурная схема), на фиг.2 - гистограмма распределения величины отношения экспериментальных данных к базовым.
Перемычки и поперечины 1 устанавливаются на пути 9 и контролируют нижний габарит состава, в том числе и сход подвижных единиц. Путевой датчик 2 установлен на минимальном расстоянии от перемычек и поперечин 1, которое допускается конструктивно в каждом конкретном случае. Такое расположение обеспечивает наиболее точную идентификацию негабаритной подвижной единицы. Видеорегистратор 3 расположен в стороне от рельсового пути 9 на расстоянии и под углом, при которых впоследствии по его записи возможно невооруженным глазом определение типа подвижных единиц и отмеченного места негабаритности с точностью, достаточной для наибыстрейшего ее поиска локомотивной бригадой. Размещение таймера 4, счетно-решающего устройства 5, отметчиков 6 и 7, устройства связи с диспетчерским пунктом 8 произвольно и не имеет принципиального значения для разрешения задачи изобретения. Единственным ограничивающим условием здесь является надежность сбора данных и передачи сигналов по линиям связи.
Перемычки и поперечины 1 электрически связаны между собой и сообщены со счетно-решающим устройством 5, которое фиксирует их срабатывание. Видеорегистратор 3 сообщен с отметчиком для нанесения меток в материалы видеонаблюдения 7. Таймер связан с отметчиком моментов времени 6. Путевой датчик 2 сообщен с обоими отметчиками 6 и 7, которые могут располагаться как внутри счетно-решающего устройства, так и вне его. Во втором случае связь между отметчиками и счетно-решающим устройством сохраняется. Таймер также может являться составной частью счетно-решающего устройства.
Также возможно размещение устройств 4-7 в составе ЭВМ непосредственно на рабочем месте диспетчера; или полный перенос функций данных устройств на аппаратно-программные возможности ЭВМ.
Работа устройства контроля схода подвижного состава заключается в следующем.
В непосредственной близости от перемычек и поперечин устройства устанавливаются путевой датчик 2 и видиорегистратор 3, подключенные к счетно-решающему устройству 5. В счетно-решающим устройстве установлены отметчик моментов времени прохождения осей колесных пар над путевым датчиком 6 и отметчик для нанесения меток негабаритной подвижной единицы в материалы видеонаблюдения, память счетно-решающего устройства и для сигнализации на пульте диспетчера 7.
При прохождении подвижного состава над устройством срабатывает путевой датчик, посылая сигнал в счетно-решающее устройство, где с помощью отметчика моментов времени происходит их регистрация в памяти в соответствии с интервалами времени их поступления.
Одновременно ведется видеорегистрация подвижных единиц железнодорожного состава.
Счетно-решающее устройство 5, используя интервалы времени поступления сигналов, начиная с интервала времени прохождения первых двух колесных пар, находит соотношения между ними. Например, соотношение интервала времени между первыми двумя колесными парами и интервала времени между первой колесной парой и третьей. При равномерном движении это соотношение в идеале равно соотношению соответствующих расстояний между колесными парами.
Например, для четырехосного вагона справедливо:
 ,
,
где t - интервал времени прохождения над педалью двух осей тележки;
Т - интервал времени прохождения над педалью второй оси первой тележки и первой осью второй тележки;
l, L - соответствующие геометрические размеры четырехосного вагона.
Полученные соотношения сравниваются с соотношениями расстояний между колесными парами подвижных единиц, имеющимися в памяти счетно-решающего блока. На основании результатов сравнения производится идентификация подвижных единиц и делается вывод о типе локомотивов и вагонов подвижного состава и их общем виде: грузовой или пассажирский локомотив и его тип; пассажирский или грузовой вагон, полувагон, крытый вагон, самосвал, платформа, цистерна и информация передается на пульт диспетчера.
В приложении (таблица 1) приведены соотношения для локомотивов. В таблице 2 даны расстояния для грузовых вагонов (См. «Грузовые вагоны колеи 1520 мм железных дорог СССР.» Москва: Транспорт. 1989. Альбом-справочник.) Анализ материалов показывает, что по соотношениям однозначно определяется тип локомотива и следовательно его геометрические размеры и расстояния между колесными парами тележек. Используя межосевые расстояния тележек локомотива, легко определить скорость движения состава, а следовательно межосевое расстояние первой тележки вагонов. Также при определении типа локомотива возможно использовать данные о приписке локомотивов к депо.
Для равноускоренного движения необходимо учитывать изменение скорости во времени. В расчете делается допущение - каждая подвижная единица имеет постоянную осредненную скорость.
Уравнение равноускоренного движения для случая его применения к оценке длины четырехосного железнодорожного вагона представимо

где S - расстояние между первой и последней осью вагона;
s1 - расстояние между осями первой тележки;
t1 - интервал времени прохождения над педалью первой и второй осей первой тележки;
t2 - интервал времени прохождения над педалью первой и второй осей второй тележки;
Т - время прохождения над педалью несущей платформы вагона, определенное по разнице текущего времени с момента прохождения первой оси и последней;
 - скорость движения состава над педалью в момент времени прохождения первой тележки вагона;
- скорость движения состава над педалью в момент времени прохождения первой тележки вагона;
 - скорость движения состава над педалью в момент времени прохождения последней тележки вагона.
- скорость движения состава над педалью в момент времени прохождения последней тележки вагона.
Дополнительную информацию о составляющих единицах подвижного состава позволяют получить видеоматериалы.
При нарушении нижнего габарита подвижной единицы срабатывает устройство контроля схода подвижного состава. Сигнал поступает в счетно-решающее устройство, где отметчик выделяет подвижную единицу с нарушенным габаритом, и в диспетчерский пункт поступает информация о срабатывании устройства контроля схода подвижного состава, порядковый номер подвижной единицы, начиная с локомотива, ее наиболее вероятный тип и общий вид, а также видеоматериалы с отметкой подвижной единицы с нарушенным габаритом. Эта информация незамедлительно передается поездной бригаде, которая целенаправленно и оперативно производит поиск неисправности в составе и ее устранение.
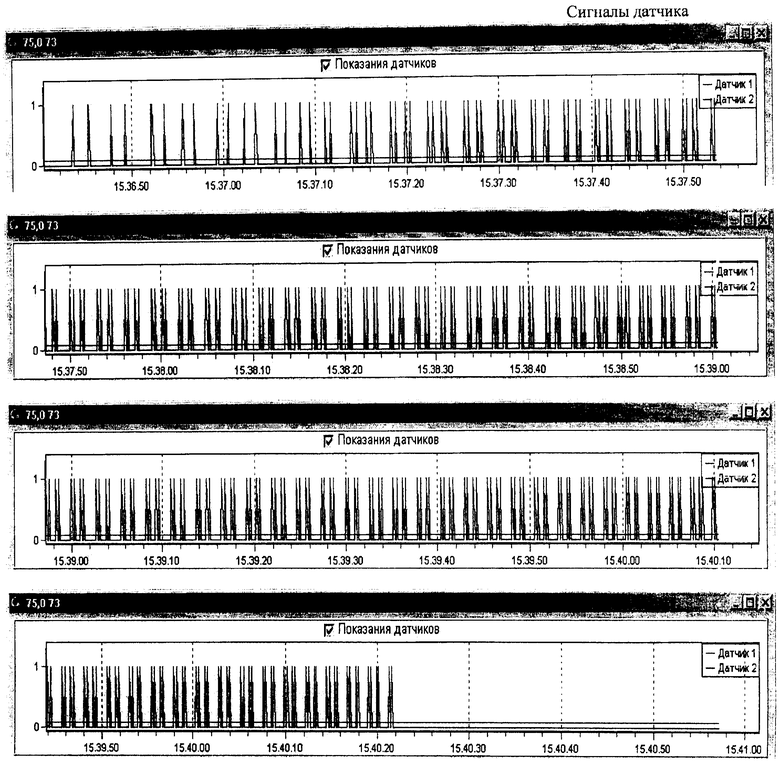
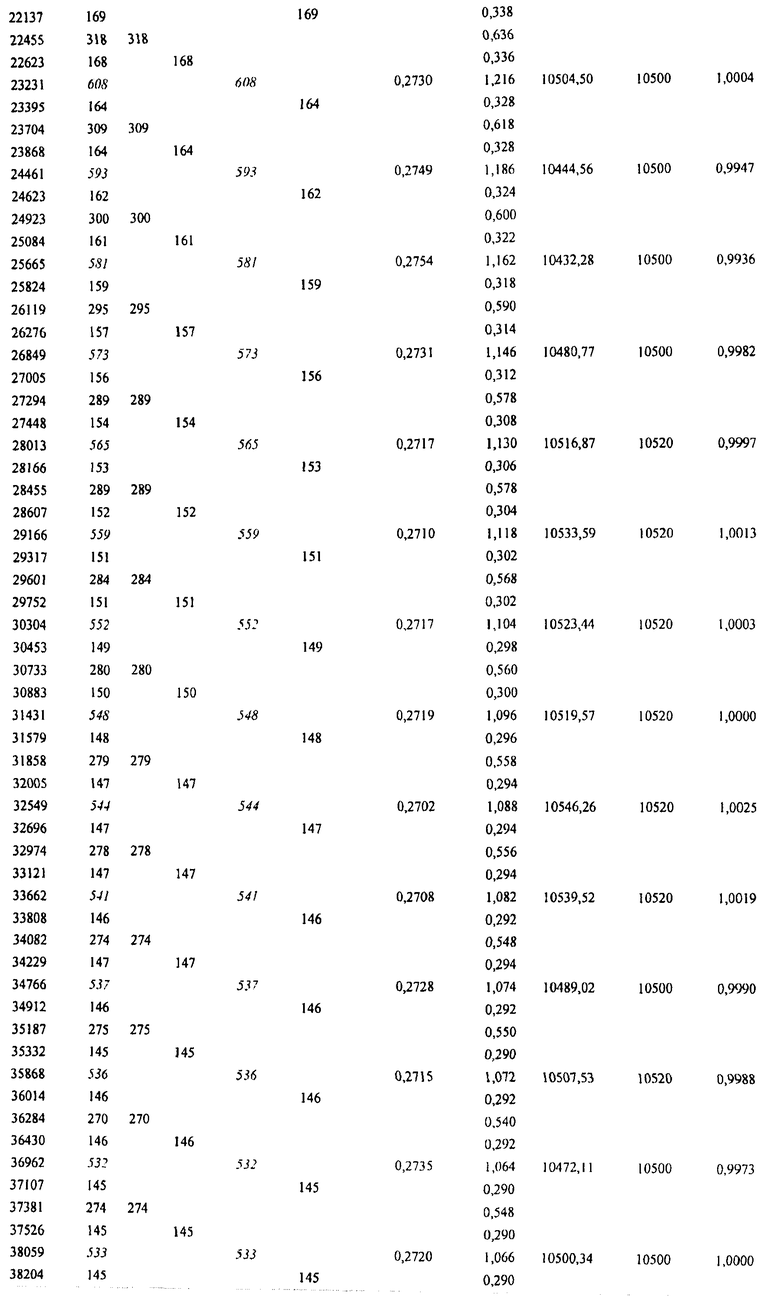
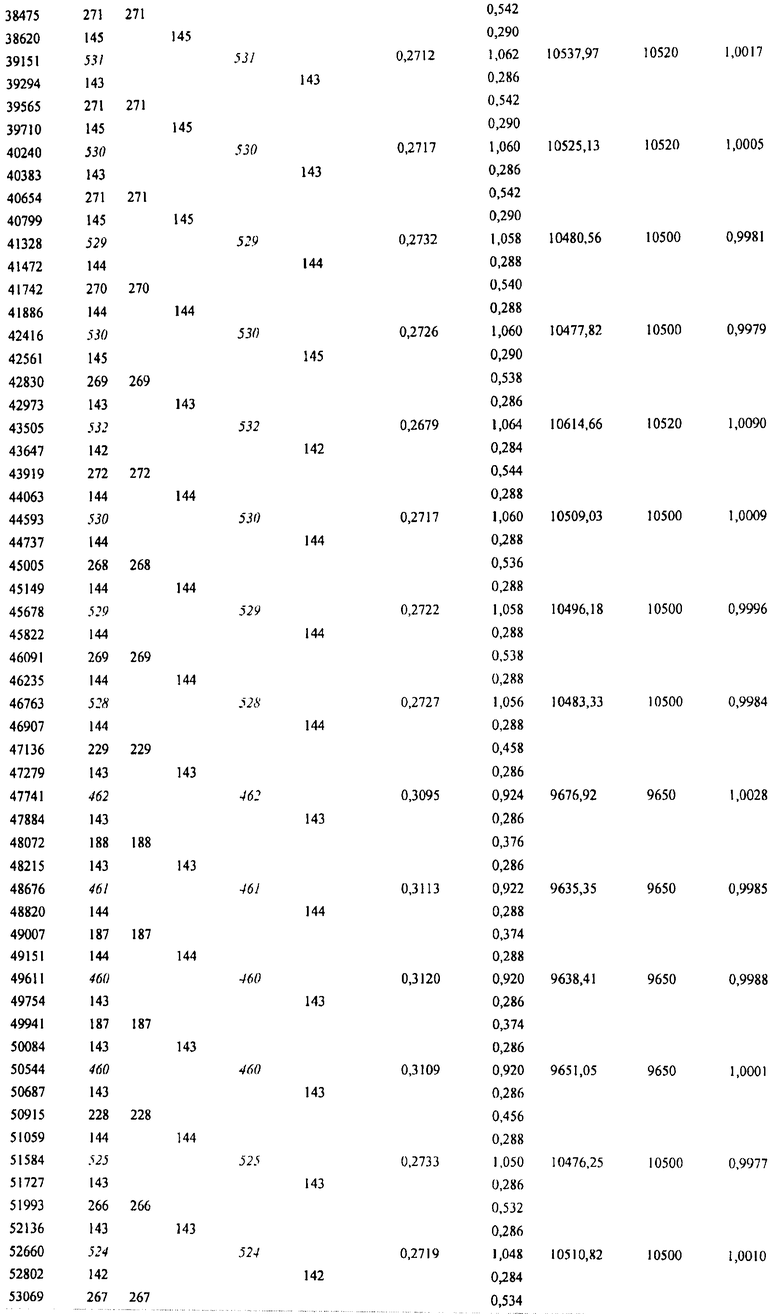
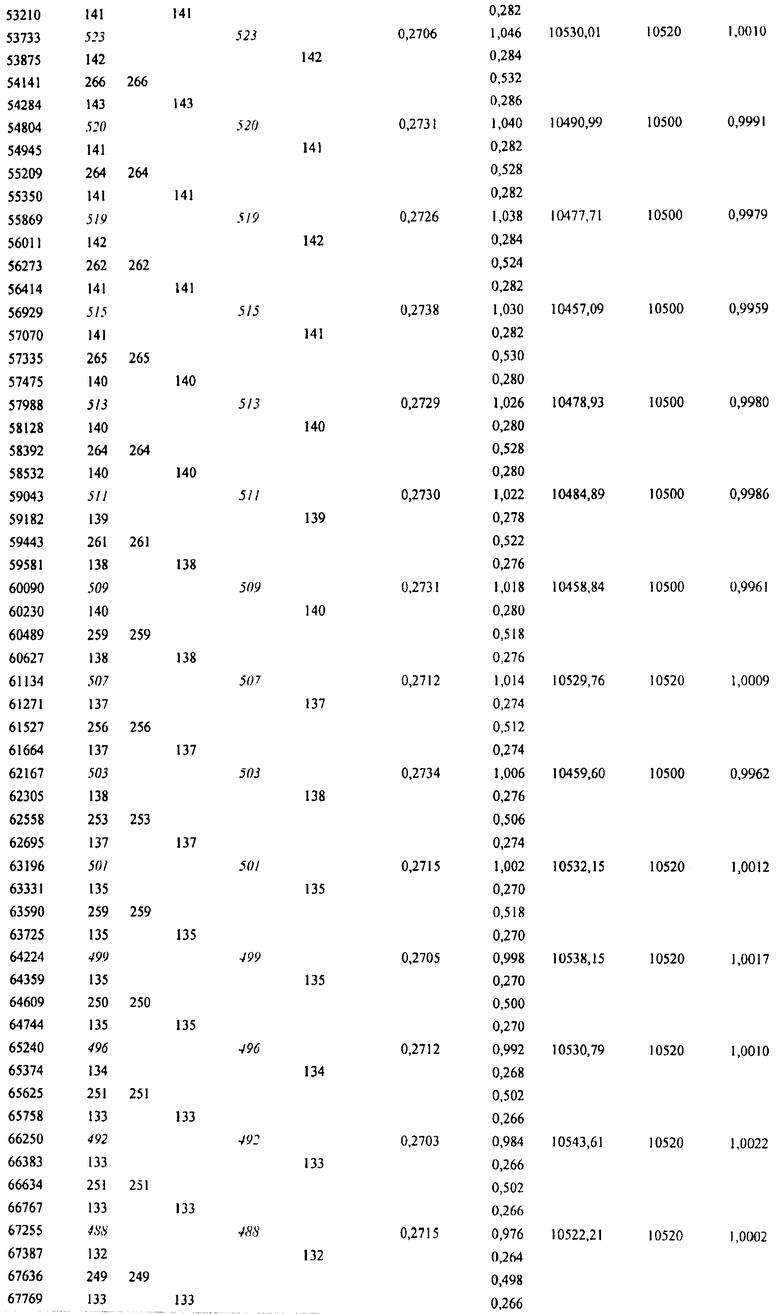
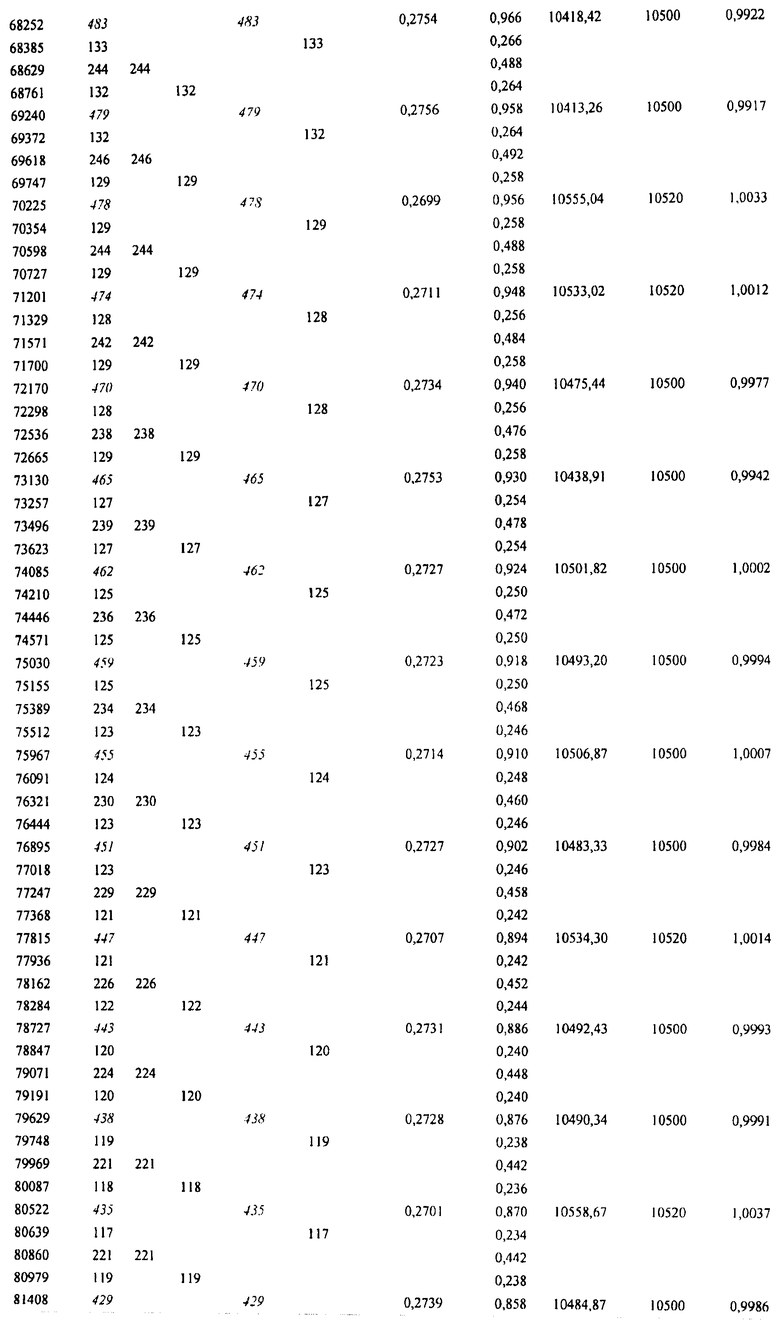
Опробование способа идентификации подвижных единиц железнодорожного состава было проведено на Южно-Уральской железной дороге. На железнодорожное полотно был установлен путевой датчик с напольным преобразователем сигналов. Сигналы регистрировались и выводились на компьютер. Время между сигналами измерялось с точностью 0,002 сек. На фиг.2 дана гистограмма распределения величины отношения экспериментальных данных к базовым для вагонов. При выравнивании по Нормальному закону дисперсия составила 0,000009.
В таблице 3 приложения приведены результаты эксперимента. В результате сравнения экспериментальных данных величины L - вычисленной длины вагона с базовыми данными таблиц 1 и 2 были идентифицированы локомотивы ВЛ10 и, в основном, полувагоны и четыре цистерны.

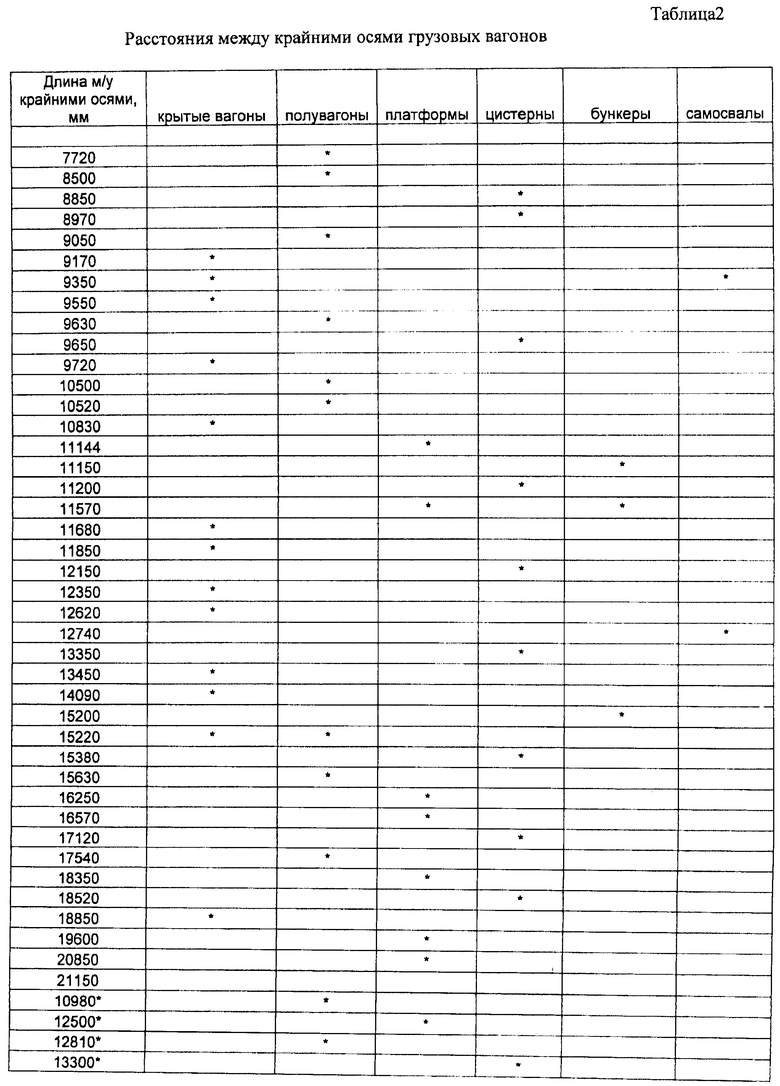

Размер между осями колесных пар наиболее распространенных моделей двухосных грузовых тележек составляет 1850 мм.
Вагоны с трехосными и четырехосными тележками в таблице обозначены звездочкой (*).
Из табличных данных видно, что подавляющее большинство вагонов имеют индивидуальные размеры и соотношения размеров между осями тележки к расстоянию между крайними осями. И только три размера 9350, 11570, 15220 повторяются дважды.
Результаты опытных работ.
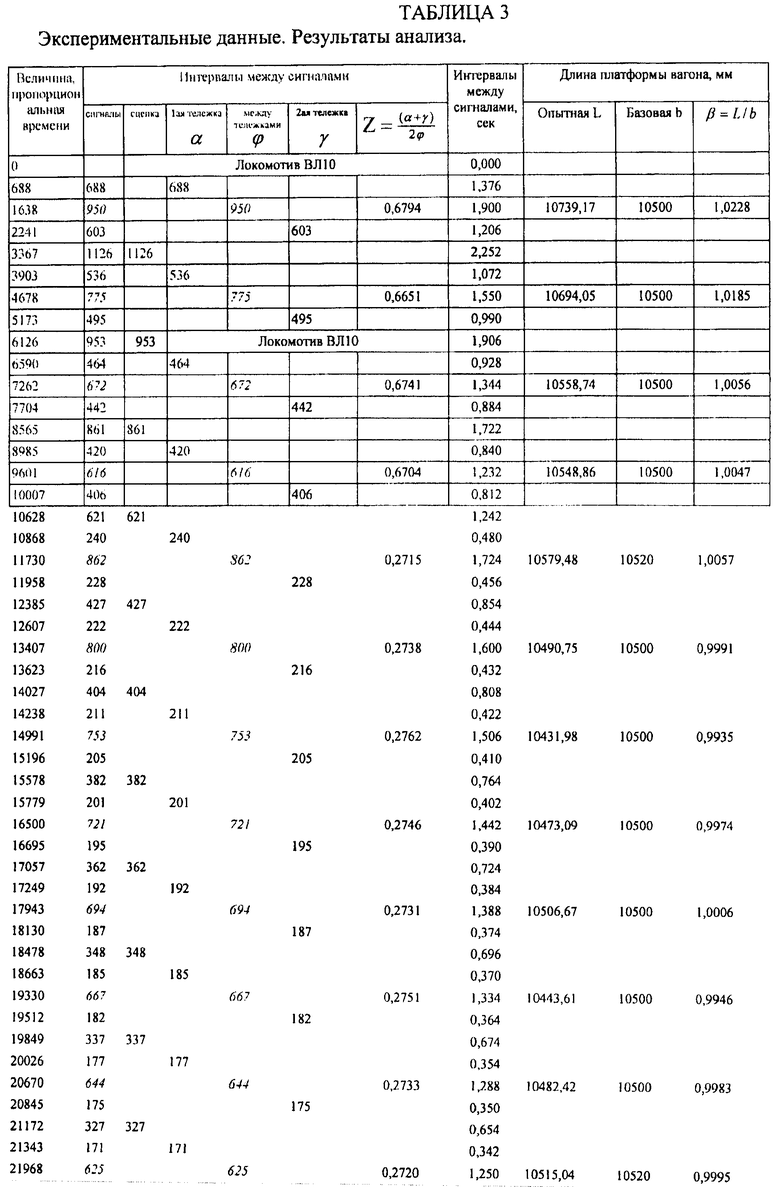
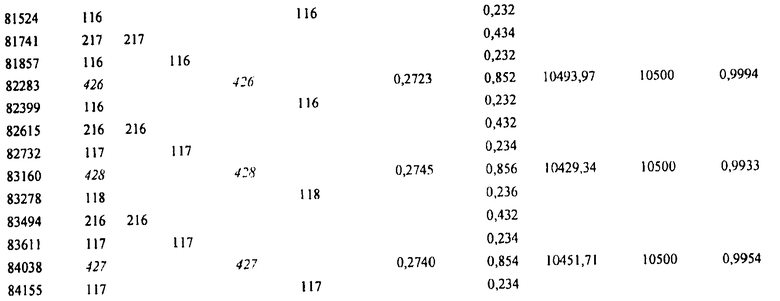
В результате сравнения экспериментальных данных величины L с базовыми данными таблиц 1, 2 были идентифицированы локомотивы ВЛ10 и, в основном, полувагоны и четыре цистерны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля нарушения нижнего габарита в железнодорожном составе (УКНГ "Неваляшка") | 2024 |
|
RU2840916C1 |
| Система определения подвижных единиц с нарушением нижнего габарита при движении длинносоставных поездов | 2017 |
|
RU2669721C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ УЧАСТКОВ ПУТИ ОТ ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2600175C1 |
| Устройство для автоматической маркировки железнодорожных единиц подвижного состава | 1987 |
|
SU1507633A1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| Устройство для разбраковки колес рельсового подвижного состава | 1972 |
|
SU734046A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| СЕЛЕКТОР БУКС ПО ТИПУ ПОДШИПНИКА НА ПОДВИЖНОМ СОСТАВЕ | 1973 |
|
SU384716A1 |
Изобретение относится к железнодорожному транспорту. Устройство контроля схода подвижного состава содержит установленные на пути перемычки и поперечины, контролирующие нижний габарит состава, и путевой датчик. Также в устройстве имеется видеорегистратор, подключенный к отметчику меток счетно-решающего устройства, и таймер, подключенный к отметчику моментов времени счетно-решающего устройства. Перемычки и поперечины соединены со счетно-решающим устройством, а путевой датчик подключен к отметчику меток и отметчику моментов времени счетно-решающего устройства. Счетно-решающее устройство соединено с диспетчерским пунктом. Решение направлено на расширение функциональных возможностей устройства. 2 ил., 3 табл.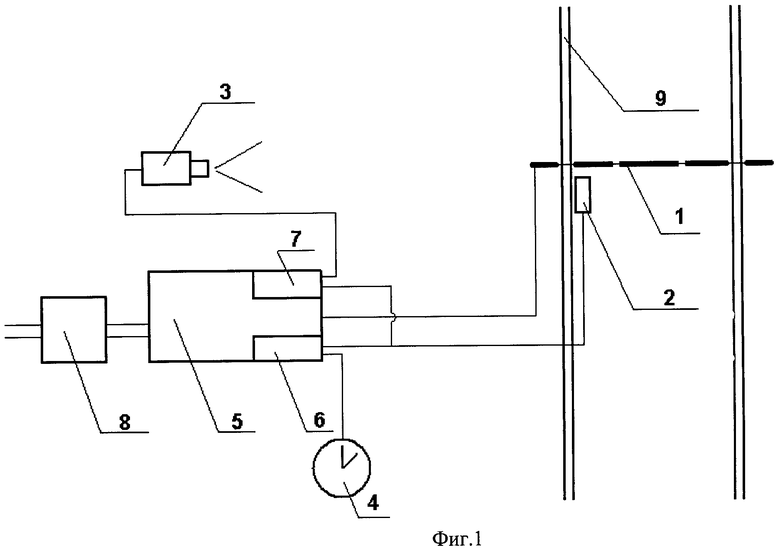
Устройство контроля схода подвижного состава, содержащее перемычки и поперечины, установленные на пути и контролирующие нижний габарит состава, путевой датчик, таймер, видеорегистратор, сообщенные со счетно-решающим устройством, имеющим возможность передавать информацию на средство связи с диспетчерским пунктом, отличающееся тем, что путевой датчик установлен на конструктивно минимально возможном расстоянии от перемычек и поперечин, а видеорегистратор установлен на расстоянии и под углом от перемычек и поперечин, при которых впоследствии по его записи возможно невооруженным глазом определение типа подвижных единиц и отмеченного места их негабаритности с точностью, достаточной для наибыстрейшего ее поиска, кроме того, устройство снабжено отметчиком моментов времени поступления сигналов о прохождении колесных пар над путевым датчиком, сообщенным с путевым датчиком, счетно-решающим устройством и таймером, и отметчиком меток, сообщенным с путевым датчиком, видеорегистратором и счетно-решающим устройством, для нанесения меток негабаритной подвижной единицы в память счетно-решающего устройства и в материалы видеонаблюдения, а алгоритм идентификации подвижных единиц счетно-решающим устройством с помощью данных меток имеет возможность учитывать динамические характеристики и для, например, четырехосного вагона основан на формуле

где S - расстояние между первой и последней осью вагона;
s1 - расстояние между осями первой тележки;
s2 - расстояние между осями последней тележки;
t1 - интервал времени прохождения над педалью первой и второй осей первой тележки;
t2 - интервал времени прохождения над педалью первой и второй осей последней тележки;
Т - время прохождения над педалью несущей платформы вагона, определенное по разнице текущего времени с момента прохождения первой оси и последней;
 - скорость движения состава над педалью в момент времени прохождения первой тележки вагона;
- скорость движения состава над педалью в момент времени прохождения первой тележки вагона;
 - скорость движения состава над педалью в момент времени прохождения последней тележки вагона.
- скорость движения состава над педалью в момент времени прохождения последней тележки вагона.
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2280580C2 |
| US 4248396 A, 03.02.1981 | |||
| Станок для изготовления костяных пуговиц | 1929 |
|
SU25722A1 |
| УСТРОЙСТВО КОНТРОЛЯ СХОДА ПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2279369C2 |
| СИСТЕМА СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНОГО СОСТАВА НА ДВУХПУТНОМ УЧАСТКЕ ЖЕЛЕЗНОЙ ДОРОГИ | 2002 |
|
RU2203822C1 |
| FR 2952456 A1, 13.05.2011 | |||
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ МИНЕРАЛЬНОГО ВОЛОКНА | 2003 |
|
RU2236387C1 |

