Изобретение относится к средствам навигационного обеспечения, в частности к средствам повышения точности координат (определения местоположения) и маршрутов движения объектов подвижных (переносных) и стационарных (в том числе людей, зверей, техники) в закрытых помещениях (в том числе в подвалах, тоннелях, шахтах), на ограниченных открытых (закрытых) территориях, а также в условиях, где использование ГЛОНАСС/GPS приемников нецелесообразно или невозможно.
Существуют аналоги данного модуля использования, но работа их строится на простом логировании маршрутов движения и работа их осуществляется только совместно со станциями мобильной сотовой сети (например, GSM). Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов позволяет выполнять в постобработке уточнение координат и маршрутов (треков) движения войсковых объектов с последующей их обработкой и анализом по способу Precise Point Positioning (РРР). Одночастотное точное точечное позиционирование (РРР) является перспективным методом высокоточной навигации с субметровой или даже сантиметровой точностью из-за его удобства и низкой стоимости. Навигационные характеристики одночастотных приемных спутниковых систем в значительной степени зависят от наличия в реальном времени и качества коррекционных продуктов для спутниковых орбит и спутниковых часов. Одним из наиболее часто используемых продуктов коррекции ошибок спутниковой орбиты и часов является Международная служба глобальных навигационных спутниковых систем (IGS), из которой продукты коррекции доступны с различными задержками, начиная от 3 ч для сверхбыстрой, до 17 ч для быстрой и 13 дней для конечной продукции (постобработки).
Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов определяет свое местоположение с помощью комбинации:
навигационной антенны с прошиваемым навигационным модулем;
электронному самописцу движения инерциальной системы.
Этапы подготовки к работе автономного мобильного модуля повышения точности определения координат и маршрутов движения войсковых объектов:
1. Калибровка электронного самописца движения (ЭСД) вращательными движениями вокруг виртуальной оси (производится при прошивке контроллера КРУС);
2. Загрузка данных в навигационный модуль ГЛОНАСС/GPS антенны (через порт UART, например, с использованием программы, GlobalTop GPS - Viewer v1.8).
В данное время нет возможности оперативного и скрытного определения местоположения объекта с требуемой точностью с использованием современных средств навигации и космической геодезии, на территории, на которые отсутствует актуальная геопространственная информация.
В настоящее время требуется иметь на вооружении автономное средство для обеспечения возможности определения координат объектов с требуемой точностью и достоверностью.
Работа ЭСД основана на использовании специальных датчиков, совместная работа которых определяет особенность изобретения: акселерометра, гироскопа, магнитометра, барометра - объединяемые контроллером решения и управления системой (КРУС). Электронный самописец движения работает в двух режимах с антенной ГЛОНАСС/GPS и без нее по алгоритму выполняемой программы. На основе информации от датчиков электронного самописца движения, автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов строит локальную траекторию перемещения (трек), без привязки к глобальным координатам одновременно записывает на SD карту. Автоматически (по решению условий заложенных в КРУС) при условии видимости спутниковой группировки, достаточного времени стояния на точке привязки программно определяется достоверность и точность координат модуля с антенной ГЛОНАСС/GPS, если точность удовлетворяет программным установкам КРУС, то осуществляется привязка трека ЭСД к глобальным координатам (т.е. задаются координаты отдельной точки в треке). Таким образом, в ЭСД накапливающуюся со временем ошибку, - устраняют за счет периодической привязки траектории к локальным координатам, посредством использования антенной ГЛОНАСС GPS, на участках стабильного навигационного поля. Данная схема используется автономным мобильным модулем повышения точности определения координат и маршрутов движения войсковых объектов для определения местоположения на большинстве закрытых объектов. Отдельный случай представляют собой шахты и подземные тоннели. В таком случае требуется определить координаты хотя бы одной точки (входа и/или выхода): тоннель имеет ограниченный радиус и, фактически, нужно определить только удаление от начала/конца тоннеля. После записи на SD карту появляется возможность получить информацию о местоположении объектов (текущую и архивную информацию).
Кроме того модуль обладает синхронизированными со стационарным пунктом часами и ввод поправки может осуществляться в постобработке (необходимо поставить лишь метку времени нажав на трек во время маршрута).
Для обработки данных предлагается использовать открытое программное обеспечение RTKLib (или Waypoint GrafNav 8.2, Magnet Office Tools, Justin и т.д.). В случае отсутствия базовой станции точность измерений до 3 метров получают при использовании специального программного обеспечения с функцией обработки в режиме РРР (Precise Point Positioning), учитывающем поправки к эфемеридам орбит и бортовым часам спутников глобальной навигационной спутниковой системы и другую информацию.
Использование автономного мобильного модуля повышения точности определения координат и маршрутов движения войсковых объектов не ограничивается работой в целях повышения точности определения координат и маршрутов движения войсковых объектов, а применим в целях картографирования территорий: для обеспечения координатной привязки, космических и аэрофотоснимков, зарубежных карт, матриц и моделей рельефа, схем, планов и другой геопространственной информации, отслеживания перемещения внутри закрытых объектов, для автоматического управления роботизированными транспортными средствами, для повышения точности местоопределения динамических объектов в условиях сильного затенения и переизлучения сигналов орбитальных группировок и т.д.
Общие признаки предлагаемого изобретения: автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов.
Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов схематично изображен на прилагаемом чертеже, где на схеме фиг. представлена предлагаемого устройства.
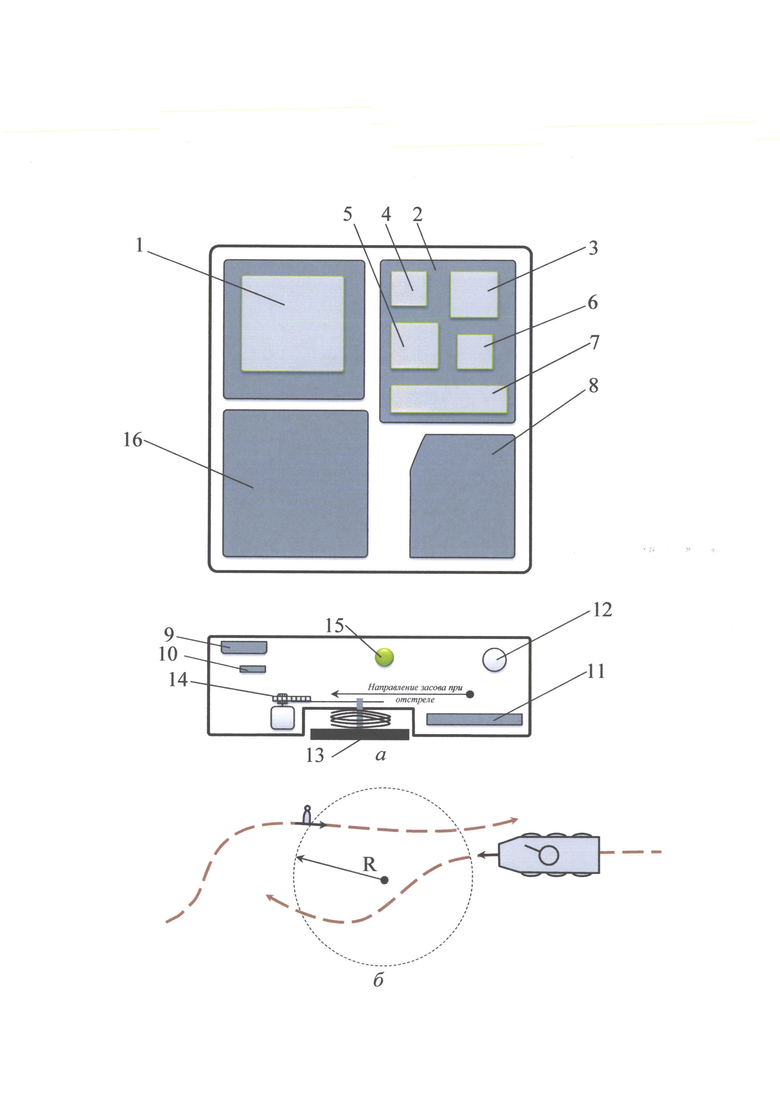
Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов внешне представляет собой устройство в закрытом герметичном корпусе с внешней прорезиненной кнопкой с индикаторами состояния работы прибора, защищенными прорезиненной сплошной заглушкой на входы/выходы и разъемы.
Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов содержит (см. фиг. а):
1. Антенну ГЛОНАСС/GPS с модулем навигации (1);
2. Плату (2) электронного самописца движения инерциальной системы (ЭСД) включает:
2.1 Гироскоп (3);
2.2 Барометр (4);
2.3 Магнитометр (5);
2.4 Акселерометр (6);
3. Контроллер расчетов и управления системой (КРУС) (7)
4. Накопитель SD (8);
5. Разъем mini-USB (для связи с компьютером) (9);
6. Разъем UART (для связи с антенной ГЛОНАСС/GPS) (10);
7. Слот для внешней SD карты (11).
8. Кнопка запуска/ выключения/ фиксации точки/ переключения режимов работы (12);
9. Магнит (силой не менее 10 кг) (13);
10. Механизм отскока (14) с мини электромотором;
11. Индикатор запуска/ выключения/ фиксации точки/ переключения режимов (15);
12. Элемент питания (16).
Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов работает следующим образом:
1. Прошивка контроллера КРУС (с установкой координат и радиуса зоны отстрела).
2. Прошивка модуля антенны ГЛОНАСС/GPS/
3. Калибровка и настройка датчиков.
4. Установка
5. Отстрел в назначенной зоне (см. фиг. 6)
6. Считывание данных
7. Обработка данных
Основные отличительные (достаточные) признаки изобретения: автономность, мобильность, простота в использовании, повышенная точность, экономичность.
Таким образом, автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов позволит обеспечить высокую эффективность наблюдения за войсковыми объектами, позволит определять координаты точек местности глобально (по всей Земле) и автономно с точностью до 3 метров, что позволит существенно повысить точность картографической продукции на зарубежную территорию (в 10-20 раз).
Список используемой литературы:
1. Аксенов А.Л., Козлов О.И., Навигационные треки как альтернатива планово-высотной основы, Известия вузов «Геодезия и аэрофотосъемка», 2018.
2. Шевчук C.O., Малютина К.И., Липатников Л.А., Перспективы использования свободного программного обеспечения для постобработки ГНСС-измерений, Вестник СГУГиТ, Том 23, №1, 2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| ТРЕК ТАХОГРАФ | 2011 |
|
RU2475704C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| КОМПЛЕКТ ВЫНОСНОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2480714C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| КОМПЛЕКС ДЛЯ ПЕРСОНАЛЬНОЙ НАВИГАЦИИ | 2014 |
|
RU2574309C2 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2011 |
|
RU2469271C1 |
Изобретение относится к средствам навигационного обеспечения, в частности к средствам определения местоположения и маршрутов движения подвижных и стационарных объектов в закрытых помещениях (в том числе в подвалах, тоннелях, шахтах), на ограниченных открытых (закрытых) территориях, а также в условиях, где использование ГЛОНАСС/GPS-приемников нецелесообразно или невозможно. Автономный мобильный модуль определения координат и маршрутов движения войсковых объектов характеризуется тем, что содержит закрытый герметичный корпус, внутри которого размещены антенна GPS/ГЛОНАСС с модулем навигации, плата электронного самописца движения инерциальной системы, накопитель данных, элемент питания и механизм отскока с мини-электромотором. При этом плата электронного самописца движения инерциальной системы содержит гироскоп, барометр, магнитометр, акселерометр и контроллер расчетов и управления системой. Технический результат – повышение точности определения координат и маршрутов движения войсковых объектов. 1 ил.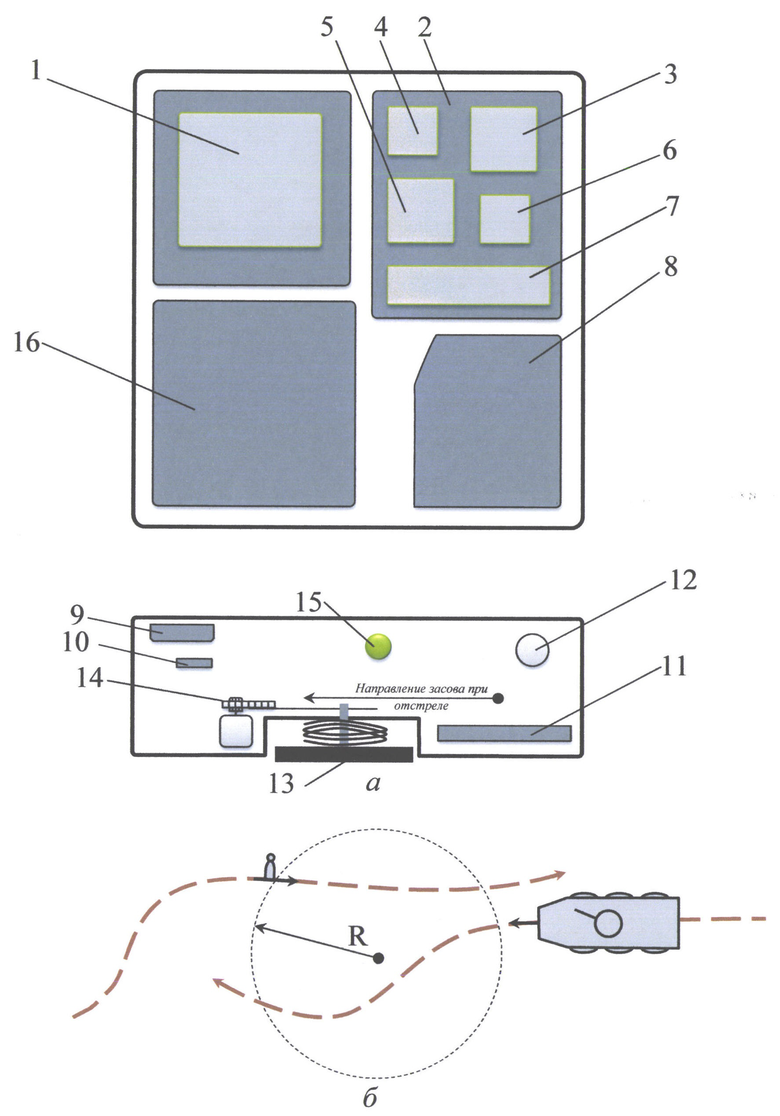
Автономный мобильный модуль определения координат и маршрутов движения войсковых объектов, характеризующийся тем, что содержит закрытый герметичный корпус, внутри которого размещены антенна GPS/ГЛОНАСС с модулем навигации, плата электронного самописца движения инерциальной системы, содержащая гироскоп, барометр, магнитометр, акселерометр и контроллер расчетов и управления системой, накопитель данных, элемент питания и механизм отскока с мини-электромотором.
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| Способ включения поляризованного линейного реле в цепи взаимоизбирательной автоматической связи | 1955 |
|
SU101814A1 |
| Прибор для измерения и автоматической записи радиационного баланса | 1959 |
|
SU127452A1 |
| КОМПЛЕКС ДЛЯ ПЕРСОНАЛЬНОЙ НАВИГАЦИИ | 2014 |
|
RU2574309C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

