Изобретение относится к области судостроения, в частности к гидравлическим рулевым машинам с силовыми исполнительными механизмами многокамерной конструкции.
Известна гидравлическая рулевая машина, содержащая трехпозиционный распределитель с электромагнитами, гидравлически соединенный с исполнительньом механизмом многокамерной конструкции и с гидронасосом, клапан переключения и устройство управления распределителем, включающее блок питания, электрически соединенный через пороговый элемент давления с тиристораиют включения и выключения электромагнитов и резисторами, установленными в анодных цепях тиристоров выключения, расположенными в бесконтактном тиристорном переключающем устройстве си.
Недостатком такой рулевой машины является то, что система управления имеет в своем составе электромагнитные реле, обмотки которых включены в основные цепи тиристоров выключения, а нормально разомкнутые контакты - в цепи управления тиристоргида.
Электромагнитные реле имеют ограниченный срок службы, определяемый .
электрической и механической износо- стойкостью, которая для лучших типов реле не превышает коммутаций. В соответствии с требованиями Регистра СССР рулевая машина должна обеспечивать не менее 320 кладок руля в час. Таким образом, при использовании электромагнитных реле схема управления может не обеспечить требуе10ьый ресурс рулевой машины. Кроме того, электромагнитные реле имеют значительное время срабатывания, что снижает быстродействие системы в целом и усложняет ее настройку на оп15тимгшьный режим переключения.
Целью изобретения является повьвиение быстродействия и нгщежности рулевой машины.
Цель достигается тем, что гидрав20лическая рулевая машина снабжена тиристорными оптронами, установленными в устройстве управления рампределителем, входные цепи которых подсоединены на резисторы, а выходные цепи под25соединены в цепи управления тиристоров включения.
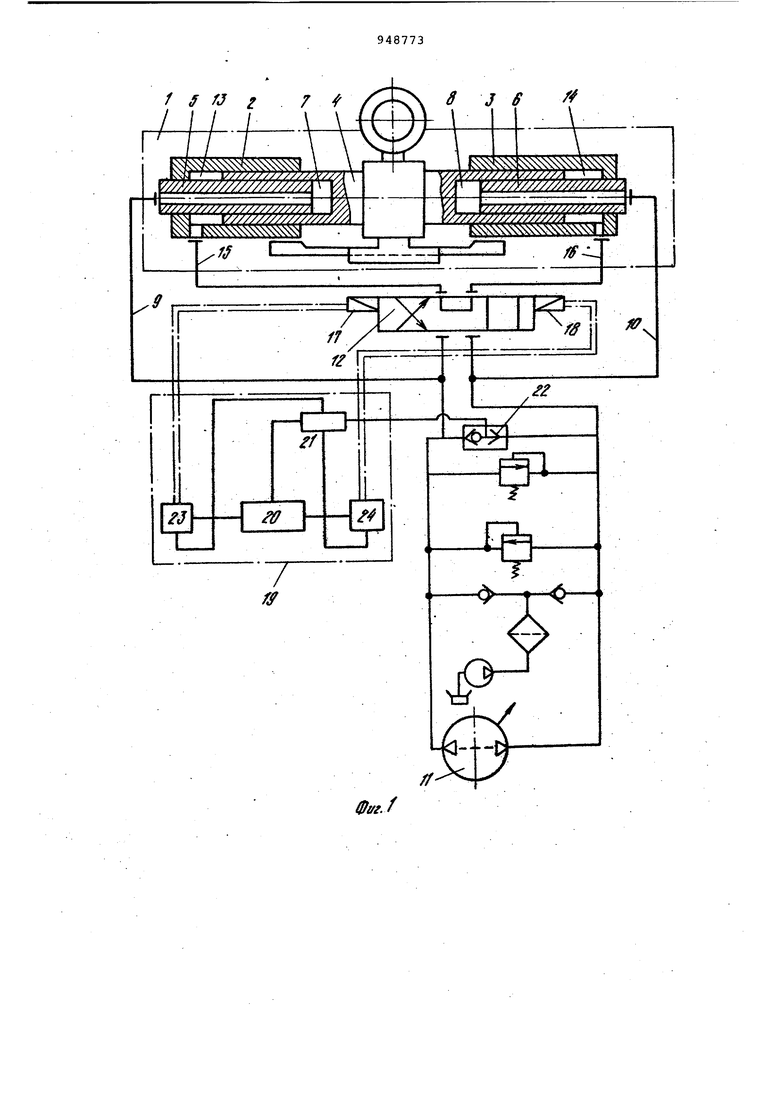
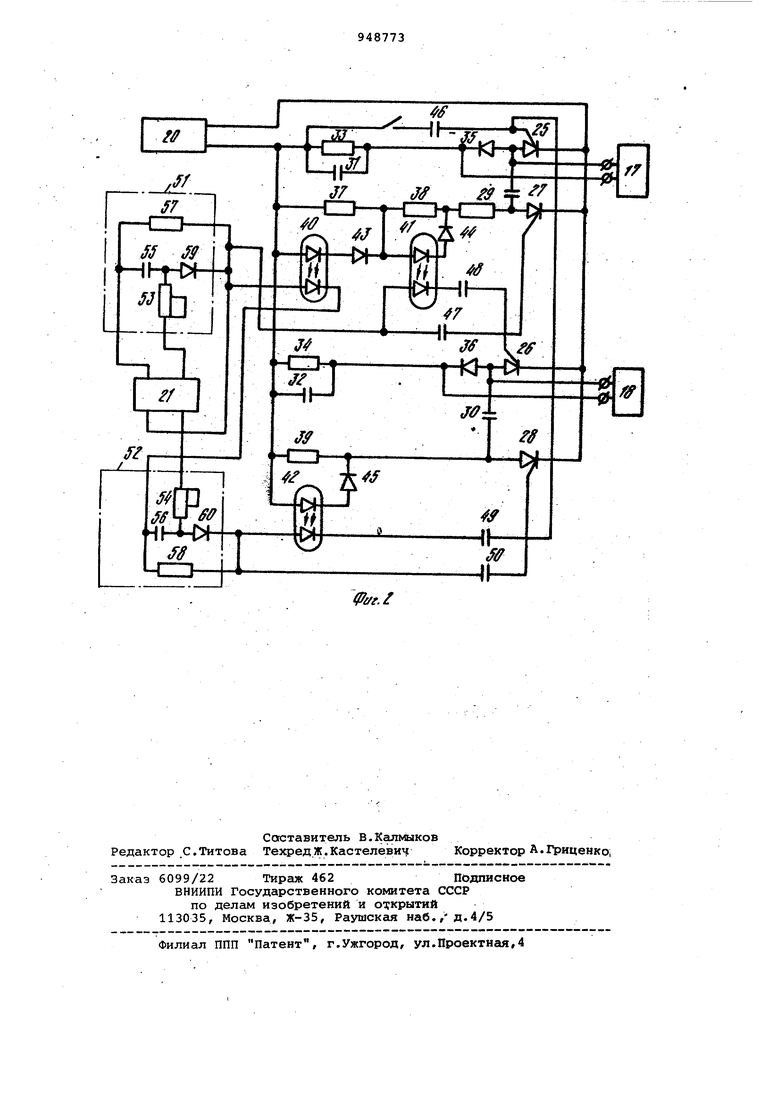
На фиг.1 показана принципигшьная , схема гидравлической рулевой машины с устройством управления трехпозици30онным распределителем; на фнг.2 электрическая схема устройства управления трехпозиционным распределителем. Рулевая машина содержит силовой исполнительный механизм 1, включаю1ций в себя цилиндры 2 и 3, подвижный плунжер 4, взаимодействующий через шарнирную передачу с румпелем, и неподвижные плунжеры 5 и 6, закрепленные в цилиндрах и установленные в расточки подвижного плунжера. Цилиндры, подвижный и неподвижные плунжер образуют четыре рабочие Камеры: нешунтированные 7 и 8, гидравлически связанные с трубопроводами 9 и 10 с гидюнасосом 11 -и трехпозиционным распределителем 12, и шунтированные камеры 13 и 14, соединенные трубопрс водами 15 и 16 также с трехпозиционным распределителем. Трехпозиционный распределитель 12 выполнен с электро магнитами 17 и 18, электрически связанными с устройством 19 управления трехпозиционным распределителем. Устройство 19 содержит блок питания 20, пороговый элемент давления 21, имеющий цепи выхода минимального и максимального сигналов, причем в качестве порогового элемента давления используются.электроконтактные манометры, потенциометрические датчики давления с двумя компараторами и другие регистрирующие устройства, обеспечивающие выдачу сигнала при максимальной и минимальной величинах давления в Нагнетающей мaгиcтpaJ7и насоса, при этом пороговый элемент гидравлически связан с помощью клапа на переключения 22 с гидронасосом 11 Бесконтактные тиристорные переклю чающие устройства постоянного тока 23 и 24 (фиг.2) включают в себя тири торы включения 25 и 26 и выключения 27 и 28, коммутирующие конденсаторы 29 и 30, конденсаторы 31 и 32, зашунтированные резисторами 33 и 34 дл дня форсировки величины тока при включении электрома гнитов, диоды 35 и 36, исключающие-перенапряжения при вкгаочениях электромагнитов, реэистот ры 37, 38 и 39, предназначенные для согласования входных,цепей оптронов 40,41 и 42, диоды 43,44 и 45, исключающие обрачное напряжение во . входных цепях оптронов и конденсаторы 46-50, предназначенные для формирования узкого импульса в цепях , управления тиристорами. Управляющие электроды тиристоров включения 25 и 26 соединены с выходами пороговосо элемента 21 через задерживающие цепочки 51,, 52 и выходы оптронов 40,41 и 42 соответственно. Входы оптронов 41 и 42 вклю чены на резисторы 38 и 39 в анодных цепях тиристоров выключения 27 и 28, управляющие электроды которых подключен т к выходам порогового элемента через задерживающие цепочки 51 и 52 соответственно. Задерживающие цепочки состоят из переменных резисторов 53 и 54, конденсаторов 55 и 56, разрядных резисторов 57 и 58 и динисторов 59 и 60. Устройство 19 управления трехпозиционным распределителем может быть применено к гидравлическим рулевым машинам с силовым исполнительным механизмом многокамерной конструкции плунжерного типа с кулисной или реечной передачей и поршневого типа с качающи1«мся цилиндрами или шатунами. Работа рулевой машины при перекладке руля из среднего в крайнее положение происходит в следующей последовательности . При подаче питания на электродвигатель гидронасоса 11 одновременно кнопкой Пуск или блок-контактами пускателя замыкается цепь управления тиристора 25, который включается и электромагнит 17 на.распределителе 12 в начале будет обтекаться током заряда конденсатора 31, величина которого выше номинальной, что обеспечит форсированное включение электромагнита 17. После заряда конденсатора величина тока будет снижена за счет ввода в работу резистора 33. При включении тиристора 25 коммутирующий конденсатор 29 зарядится до величины напряжения источника питания следующей полярностью: на клемме, соединенной с анодом тиристора 27, , а на клемме, соединенной с анодом тиристора 25, - минус. При включении электромагнита 17 золотник распределителя 12 займет левое положение, при котором рабочие 7,8,13 и 14 соединены с гидронасосом. 11 по дифференциальной схеме. При этом камеры 13 и 14, которые по рабочей площади плунжера выполнещл меньше камер 7 и 8, подключены к ги4ронасосу 11 -через трубопроводы 16 и распределитель 12, а камеры 7,8 - непосредственно к насосу трубопроводами 9 и 10. При среднем положении руля и отсутствии подачи рабочей жидкости от гидронасоса 11 давление в его Нагнетающей магистрали равно нулю и сигналы с выхода порогового элемента 21 непоступают, так как тиристор ный оптрон 40, Включенный в цепь выходна минимального сигнала порогового устройства, заперт. При задании угла перекладки руля на правый борт рабочая жидкость, поступая от гидронасоса 11 в камеры 7 и 14 и сливаясь из 8 и 13, перемещает плунжер 4 вправо с максимальной скоростью. При отклонении руля растет давление в нагнет кяцей магистрали насоса, также растет и величина тока двигателя. При достижении этими величинами заданного значения Pf«ia порогового утсройства поступает сигнал .пЪстоян ного напряжения за задерживаеТ ую цепочку. Конденсатор 55 через регулируемый резистор 53 начинает заряжаться, при достижении на нем величины напряжения равного величине напряжения дииистора, последний откроется, и конденсатор 55 импульсно разряжается на резистор 57. Этот импульс через ражделительный конденсатор 47 поступит на управляющий элек- трод тиристефа 27 и на анод тиристсч ного оптрона.41. Длительность импульса шбрана таким образом, что она достаточна для открытия тиристора 27, не меньше суммарного времени срабатывания тиристора 27 и оптрона 41. Тиристор 27 откроется. Это приведет к тому, что коммутирующий конденсатор 29, перезаряжаясь, включит тиристор 25, и электромагнит 17 обесточится.-Падение напряжения на резисторах 37 и 38 поступит на управляющие входа оптронов 40 и 41, и тиристоры оптроиов будут готовы проводасть ток. После отключения электромагнита 17 золотник займет среднее положение, а камеры 13 и 14 шунтируются между собой распределителем. Рабочая жидкость от насоса подается в KaiMepy 7 и сливается из камеры 8. Руль будет вращаться с уменьшенной скоростью. Величина давлени нагнетания в связи с увеличением рабочей площа.ди плунжера упадет и может батъ даже на какое-то время ниже минимальной вешанной Р,. С порогово го элемента может поступить ложный сигнал, однако включение тиристора 28 исключается задерживающей цепочкой на динисторе 60, которая в этом случае не срабатывает, так как время заряда конденсатора 56 до напряжения переключения динистора 60 выбирается больше, чем время длительности ложных сигнсшов. При дальнейшей перекладке руля и вторичном достижении заданного максимального давления lAgKc f порогового элемента 21 снова поступит сигнал Сработает задерживакяцая цепочка на дииистр 59 и на управляющие электроал тиристоров 26 и 27 поступят импульсы напряжения. Так как тиристор 27 был открыт раньше при достижении первого максимума, то он и остается открытым. Теперь откроется тиристор 26, т.«. .произойдет включение электромагнита 18. Коммутирующий конденсатор 30 заряди-тся до величины напряжения питания со следуницей полярностью плюс - на клемме, роединенной с анодомтиристора 28,- минус - с анодом тиристора 26. При включении электромагнита 18 золотник распределителя займет правое положение и рабочая жидкость от насоса подается в камеры 7 и 13 и сливается из камеры 8 и 14, заставляя руль вращаться с минимальной угловой скоростью. С увеличением рабочей площади плунжера давление в нагнета|Ющей магистрали упадет, однако задержйвахядая цепочка на динисторе 60 исключит, ложное срабатывание система в поступления ложного сигнала. Дальнейшее увеличение нагрузки на руле и давления в нагнетающей магистрали гидфрнасоса осуществляется на ПОЛНОЙ площади плунжера и минималь-ной угловой скорости перекладки руля. При .вращении руля из правого положения в среднее работа рулевой машины происходит в обратной последовательности. Как только давление нагнетания достигнет величины заданной PIWHH I пороговое устройство выдает сигНс1Л, сработает задерживающая цепочка на динисторе 59, и сигнал через разделительный конденсатор поступит на управляющий электрод тиристора 26, последний откроется. Конденсатор 30 начнет перезаряжаться и выключит тиристор 28. Включение тиристора 26 приведет к тому, что |0птрон 41 будет также подготовлен к работе, так как через его диод будет протекать ток управления. Ейлключение тиристора 26 вызовет отключение электромагнита 18, что в свою очередь приведет к переключению камер цилиндров на более высокую скорость. Ложное срабатывание от мгновенного увеличения давления выше которое может последовать после этого, будет включено згшерживакяпей цепочкой на динисторе 59. При дальнейшем снижении давления, когда повторно будет достигнута згшанная минимальная величина давления или тока, снова наступит сигнал от порогОвого устройства и с задер живаю1пей цепочки на динисторе 60 поступят импульсы управления на управляющие электроды : тиристоров 25 и 28, последний уже находится в открытом состоянии, а тиристор 25 откроется. , Конденсатор 29, перезаряжаясь, восстановит запорные свойства тиристора 27, резисторы 37 и 38 обесточатся и они также закроются , т.е. цепи минимального сигнгша в цепь управления тиристоре 26 бутуд прерваны. При срабатывании электромагнита 17 и соответствующего переключения гидравлической магистрали машины перекладного руля будет максимгшь- . ной.. Таким образом, в этом состоянии устройство 19 имеет включенным электромагнит Д 7 и оптрон 42, все.остальные элементы выключены.. Работа рулевой машины при перекла-дке руля из среднего в крайнее левое положение происходит аналогично. Таким образом, каждым электромагнитом распределителя управляет ти ристорное устройство, состоящее из тиристЬра включения и тиристора выключения, причем в анодные цепи тиристоров вь ключения включены череь соответствующие резисторы управляющи входда (диоды) оптронов, при этом чис ло оптронов может быть любым. При необходимости повышения числа ступеней гидравлической рулевой машины устройство управления строит- ся аналогичным образомпри соответст вующем увеличении числа электромагнитов , переключающих золотники в гидравлической магистрали, и бесконтактных тиристорных устройств постоянного тока. Изобретение повышает эксплуатационные характеристики рулевой машины, исключая из ее схемы контактные элементы, имеющие значительный технологический разброс по времени срабатывания, В частности, повышение надежности работы рулевой машины достигается за счет увеличения в 3-4 раза ресурса управления распределителем. Применение оптронов, кроме того, значительно уменьшает время срабатывания устройства управления распреде .лителем, что повышает быстродействие рулевой машины и облегчает ее настройФормула изобретения Гидравлическая рулевая машина,содержащая трехпозиционный распределитель с электромагнитами, гидравлически соединенный с исполнительным механизмом многокамерной конструкции и с гидронасосом, клапан переключения и устройство управления упомянутым распределителем, включающее блок питания, электрически соединенный через пороговый элемент давления с тиристорами включения и выключения электромагнитов и резисторами, установленными в анодных цепях тиристоров выключения, расположенными в бесконтактном тиристорном переключающем устройстве, о тличающаяся тем, что, с целью повышения ее быстродействия и надежности, она снабжена тиристорными оптронами, установленными в устройстве управления распределителем, входные цепи которых подсоединены на упомянутые резисторы, а выходные цепи подсоединены в цепи управления тиристоров включения. Источники информации, принятые вЪ-г внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2639092/27-11, кл. В 63 Н 25/30, 1979 Гпрототип)1 5 fJ г 7 8 J
$ifg.f S //
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая рулевая машина | 1978 |
|
SU770927A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969596A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU880882A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969595A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969594A1 |
| Электрогидравлическая рулевая машина | 1986 |
|
SU1320122A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU998233A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU994341A1 |
| Устройство для управления электрогидравлической рулевой машиной судна | 1989 |
|
SU1691226A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU998234A1 |