Изобретение относится к лабораторной системе, имеющей устройство транспортировки для образцов, по меньшей мере одно устройство обработки для приготовления, анализа и/или процессинга образцов, по меньшей мере одно подвижное устройство манипулирования для манипулирования образцами в зоне действия устройства обработки и систему слежения, которая перемещается вместе с устройством манипулирования для поддержания безопасной дистанции.
В области производства цемента известна лабораторная система, в которой два различных устройства обработки размещены вокруг робота, который расположен в центре. Робот передает образцы между устройствами обработки и направляет образцы конкретным устройствам обработки. Образцы обычно перемещаются с помощью носителя образца, представляющего собой, например, стакан или стальное кольцо. Материал образца либо свободно лежит в стакане, либо вдавлен в стальное кольцо.
Измерения материала образца из носителя образца (стакана) также выполняются роботом. Центральный робот, однако, является относительно дорогим и потенциально опасным для людей вследствие его большого рабочего диапазона и его кинематики (значительные усилия и ускорения), что, в свою очередь, требует соответствующих защитных ограждений. Помимо этого, возможность установки отдельных устройств обработки ограничена центральным размещением робота.
В EP-A-0 633 207 предлагается лабораторная система, в которой перемещение образцов конкретным устройством обработки выполняется с помощью непрерывно вращающейся конвейерной ленты. Конвейерная лента может останавливаться с помощью устройств остановки с целью перемещения носителя образца в заданное положение остановки в устройстве обработки. Затем устройство манипулирования, которое ассоциировано с устройством обработки, перемещает носитель образца из положения остановки в соответствующее устройство обработки и обратно.
Хотя в такой лабораторной системе размещение отдельных устройств обработки является существенно более гибким, и при этом можно отказаться от дорогостоящего центрального робота, система все еще является относительно сложной.
На практике также известны лабораторные системы, в которых образцы перемещаются самодвижущимся роботом, который снабжен, например, лазерным сканером для обеспечения возможности объезда препятствий.
В DE 200 06 549 U1 раскрыто устройство для автоматического выполнения химических или биологических процессов в сосудах для образцов. В этом случае сосуды для образцов перемещаются к устройству обработки с помощью ленточного конвейера. Оконечное положение тележки конвейера, которого может достигнуть ленточный конвейер, отслеживается с помощью датчиков. С помощью устройства манипулирования, которое предусмотрено в области устройства обработки, контейнеры с образцами перемещаются между тележкой конвейера и устройством обработки.
DE 199 30 019 A1 описывает устройство для управления перемещением очищающего материала по пути транспортировки. Размещение и ориентацию очищающего материала на пути транспортировки отслеживают с помощью камеры и системы обработки изображений.
Управление способами конвейерной транспортировки с использованием компьютерного распознавания образов также известно из DE 10 2 00 6015 689 A1, DE 10 2006 002 704 A1 и DE 10 2005 063 193 A1.
В DE 203 10 903 U1 и DE 87 17 574 U1 дополнительно используются оптоэлектронные элементы для определения положения или распознавания объектов в системах конвейерной транспортировки.
DE 295 20 515 U1 описывает транспортную систему, в которой тележка снабжена CCD камерой для распознавания направляющей. Наконец, DE 201 20 700 U1 относится к системе перемещения бутылок, снабженной устройством слежения с камерой и системой обработки изображения.
Задачей настоящего изобретения является предоставление лабораторной системы, которая обеспечивает возможность параллельной работы человека и машины, без необходимости использования сложных защитных ограждений.
Эта задача решается, согласно изобретению, признаками пункта 1 формулы изобретения.
Лабораторная система по изобретению по существу содержит устройство транспортировки образцов, по меньшей мере одно устройство обработки для приготовления, анализа и/или процессинга образцов, по меньшей мере одно подвижное устройство манипулирования для манипулирования образцами в области устройства обработки, причем устройство манипулирования выполнено с возможностью перемещения образца между устройством транспортировки и устройством обработки, и систему слежения, которая перемещается вместе с устройством манипулирования для поддержания безопасной дистанции. Устройство манипулирования может перемещаться между по меньшей мере двумя устройствами обработки и система слежения представляет собой систему слежения, которая перемещается с устройством манипулирования и которая содержит камеру для генерации удаленных изображений и/или систему определения местоположения, имеющую по меньшей мере один передатчик и один приемник. Приемник системы определения местоположения установлен на подвижном устройстве транспортировки и выполнен таким образом, что он генерирует предупреждающий сигнал, если по меньшей мере один передатчик оказывается от приемника на расстоянии, меньшем, чем минимальное. Камера установлена на устройстве манипулирования или также на устройстве транспортировки. Система слежения используется, если существует потенциальная опасность для человека, исходящая от устройства манипулирования, которое установлено на подвижном устройстве транспортировки.
Система слежения, которая предпочтительно содержит как камеру, так и систему определения местоположения, обеспечивает возможность параллельной работы человека и машины в относительной близости друг от друга без сложных защитных ограждений, ограничивающих свободу перемещения.
Независимые пункты относятся к дальнейшему развитию изобретения.
Согласно другому варианту осуществления изобретения, система слежения дополнительно содержит устройство слежения за электрическим током и/или мощностью, которое отслеживает значения тока и/или мощности устройства манипулирования.
В дополнение к подвижному устройству манипулирования также возможно, что по меньшей мере одно устройство обработки также выполнено подвижным, посредством чего дополнительно повышается гибкость лабораторной системы.
Термин “образец” обозначает носитель образца, который содержит, например, стакан с материалом образца, стальное кольцо с впрессованным материалом образца, пустые стаканы, пустые стальные кольца и различные контейнеры различных размеров для материала образца. Материал образца транспортируют, например, в свободнолежащем состоянии в стаканах или контейнерах. Однако материал образца также может быть впрессован в стальное кольцо после соответствующей подготовки.
Устройство манипулирования также может быть выполнено таким образом, что оно может отмерять материал образца из носителя образца, в частности, стакана, в устройство обработки.
Необязательно, устройство транспортировки может перемещаться из одного местоположения в другое самостоятельно или по заданному пути транспортировки, в частности, по направляющей.
Пути транспортировки могут проходить в различных областях пространства и/или различных плоскостях и могут соединяться друг с другом любым образом. В соответствии с частным вариантом осуществления, устройство манипулирования может перемещаться вместе с одним или несколькими образцами на устройстве транспортировки. Также могут быть дополнительно обеспечены одно или более транспортных устройств, которые осуществляют транспортировку только одного или более образцов.
В соответствии с предпочтительным вариантом осуществления устройства транспортировки имеют индивидуальную систему подачи энергии, в частности, низковольтную систему, и могут быть выполнены самодвижущимися. Дополнительно, устройство транспортировки может снабжать электроэнергией перемещаемое устройство манипулирования или устройство обработки.
Дополнительные преимущества обеспечиваются, если путь транспортировки выполнен модульным и может быть без дополнительных усилий расширен любым желаемым образом. При этом отпадает необходимость в установке дополнительных электрических компонентов (помимо рельсов). В соответствии с другим вариантом осуществления изобретения система транспортировки содержит по меньшей мере первый путь транспортировки и второй путь транспортировки, которые размещены со сдвигом в вертикальном направлении, причем между первым и вторым путями транспортировки предусмотрено подъемное устройство. При этом устройства обработки могут быть расположены на различных уровнях или этажах. Множество путей также может проходить параллельно и сочетаться любым желаемым образом.
Дополнительные преимущества и варианты осуществления изобретения будут более подробно описаны ниже со ссылками на чертежи, на которых:
Фиг.1 представляет схематическую блок-схему лабораторной системы;
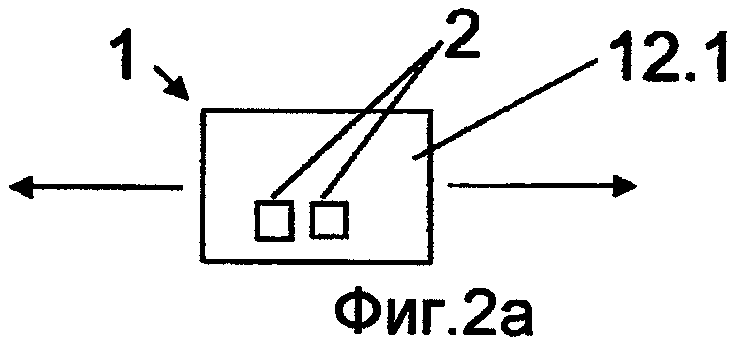
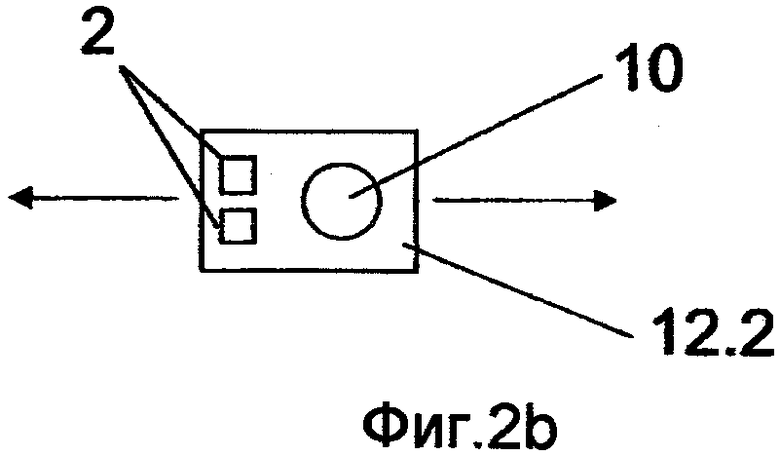
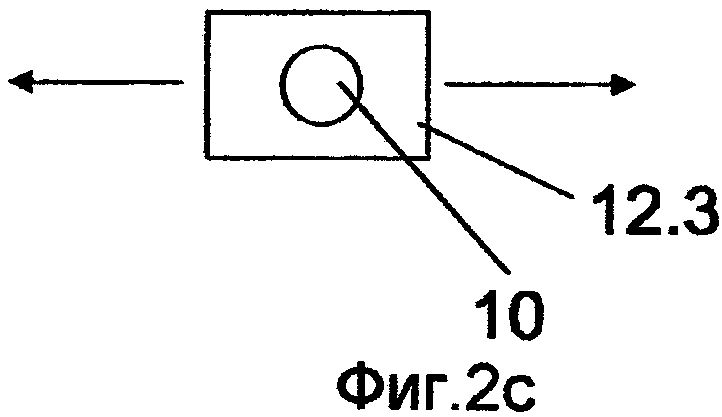
Фиг.2а-2с представляют схематические иллюстрации различных вариантов осуществления устройства транспортировки (тележки);
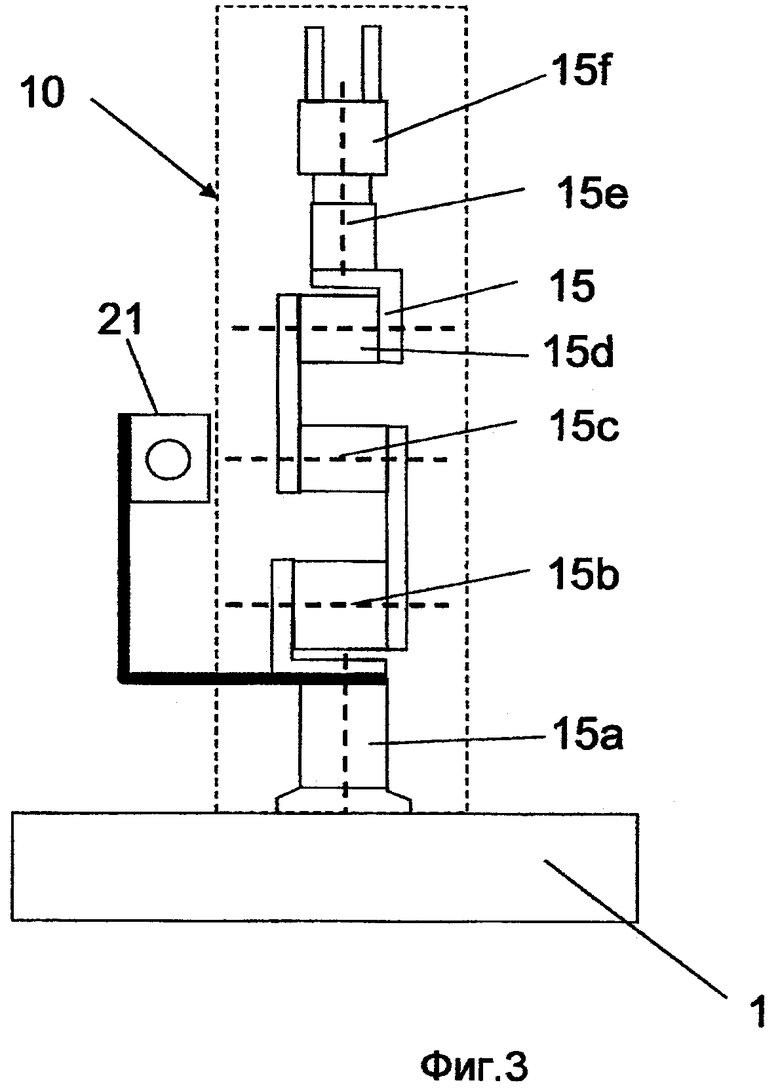
Фиг.3 представляет схематическую иллюстрацию устройства транспортировки, имеющего устройство манипулирования и устройство слежения, имеющего камеру;
Фиг.4 представляет схематическую иллюстрацию устройства слежения, имеющего камеру;
Фиг.5 представляет схематическую иллюстрацию системы определения местоположения; и
Фиг.6 представляет схематическую иллюстрацию блока позиционирования и станции загрузки.
Проиллюстрированная на Фиг.1 лабораторная система по существу содержит устройство 1 транспортировки образцов 2, множество устройств 3-9 обработки и по меньшей мере одно устройство 10 манипулирования для манипулирования образцами 2 в области устройства обработки.
Термин “образец” обозначает носитель образца, который содержит, например, стакан с материалом образца, стальное кольцо с впрессованным материалом образца, пустые стаканы, пустые стальные кольца и различные контейнеры различных размеров для материала образца. Материал образца транспортируют, например, в свободнолежащем состоянии в стаканах или контейнерах. Однако материал образца также может быть впрессован в стальное кольцо после соответствующей подготовки.
Устройства транспортировки (например, тележки) либо выполнены самодвижущимися, либо выполнены с возможностью их перемещения вдоль пути 11 транспортировки, в частности, направляющей.
Устройство 10 манипулирования можно перемещать по пути 11 транспортировки или по второму пути транспортировки между по меньшей мере двумя из устройств 3-9 обработки. В обсуждаемом варианте осуществления устройство 10 манипулирования можно перемещать на устройстве транспортировки вместе с одним или несколькими образцами 2.
Устройство 10 манипулирования выполнено с возможностью переноса образца 2 между устройством 1 транспортировки и одним из устройств 3-9 обработки. Устройство 10 манипулирования может содержать, например, соответствующим образом выполненный манипулятор 15, который может принимать образец и носитель образца с материалом образца и, необязательно, также может отмерять материал образца из носителя образца в область устройства обработки. Отмеривание может осуществляться путем медленного высыпания материала образца. Для улучшения подвижности материала образца также могут быть дополнительно предусмотрены средства, которые воздействуют высокочастотной вибрацией на захват 15f устройства 10 манипулирования или манипулятора 15.
В соответствии с предпочтительным вариантом осуществления лабораторная система предназначена для подготовки, анализа и/или процессинга образцов цементного производства и/или обогащения руды и полезных ископаемых. В этом случае устройства 3-9 обработки представляют собой, например, приемную станцию 3 пневматической почты, мельницу/пресс 4, 5, устройство 6 измерения степени измельчения, спектрометр 7, дифрактометр 8 и систему 9 возврата.
На Фиг. 2а-2с проиллюстрированы различные варианты осуществления устройства 1 транспортировки. Устройство 1 (12.1) транспортировки, проиллюстрированное на Фиг.2а, выполнено в виде транспортной тележки для одного или более образцов 2. Устройство 12.2 транспортировки, проиллюстрированное на Фиг.2b, также служит для транспортировки устройства 10 манипулирования. Устройство 12.3 транспортировки, проиллюстрированное на Фиг.2с, выполнено исключительно в качестве тележки для манипулятора и служит для перемещения устройства 10 манипулирования.
В соответствии с другим вариантом осуществления изобретения, устройство 1 транспортировки имеет свой собственный источник энергии, в частности низковольтную систему. Соответственно, устройства транспортировки могут быть выполнены самодвижущимися. Помимо этого, устройство транспортировки может также снабжать электроэнергией устройство манипулирования или устройство обработки (установленные на устройстве транспортировки).
Однако подача электроэнергии на устройства транспортировки и устройство манипулирования может также осуществляться через путь транспортировки (например, через рельс).
Путь транспортировки для устройств транспортировки может быть выполнен в виде рельсового пути, причем дополнительные преимущества обеспечиваются при его исполнении в модульном виде, что позволяет придать ему любую форму и размеры.
Для обеспечения еще большей гибкости при прокладке пути можно предусмотреть первый путь транспортировки и второй путь транспортировки, смещенные друг относительно друга в вертикальном направлении, причем между первым и вторым путями транспортировки предусмотрено подъемное устройство 14 для устройств транспортировки (Фиг.1). При этом обеспечивается возможность соединения путей на различных уровнях.
В контексте настоящего изобретения также возможны любые другие конструктивные приемы для расширения пути транспортировки, адаптированные для соответствующих лабораторных условий. С учетом изложенного выше подхода возможно обеспечение свободной пространственной конфигурации, поскольку устройства обработки могут быть размещены практически в любой области пространства.
На Фиг.3 показано устройство 10 манипулирования, которое размещено на устройстве 1 транспортировки, и которое может перемещаться вместе с ним. В этом случае устройство манипулирования выполнено, например, в виде манипулятора 15. Помимо этого, в этом варианте осуществления также показана камера 21, установленная на манипуляторе. Однако камера 21 может быть также установлена на подвижном устройстве транспортировки.
Манипулятор 15 в данном случае выполнен в виде масштабируемого легкого манипулятора и содержит множество вращающихся и шарнирных узлов в 15a, 15b, 15c, 15d и 15e, с помощью которых может быть создана реконфигурируемая, модульная робототехническая структура. Помимо этого, также имеется электрический захват 15f. Отдельные модули привода (захват и вращающиеся/шарнирные узлы) могут быть смонтированы свободно и гибко с помощью соединительных компонентов для формирования отдельного легкого манипулятора класса защиты IP65.
Зона обслуживания может быть адаптирована для конкретного применения путем свободного выбора кинематической структуры. Вращающиеся и шарнирные блоки приводятся в движение, например, с помощью бесщеточных сервомоторов с волновой зубчатой передачей и уже снабжены укомплектованными электронными системами питания и управления, что позволяет выполнять позиционирующие перемещения с контролем отклонения и отслеживанием конечного положения, напряжения, тока и температуры. Использование легких и в то же время высокостабильных материалов позволяет обеспечить компактные шарнирные узлы с отношением собственная масса/переносимая нагрузка, лучшим чем 2:1. Интерфейсы питания, управления и связи также могут быть объединены, так что для сети управления требуется только один кабель.
Поскольку компоненты привода снабжены полыми валами, кабельные линии могут проходить внутри и, следовательно, быть защищенными.
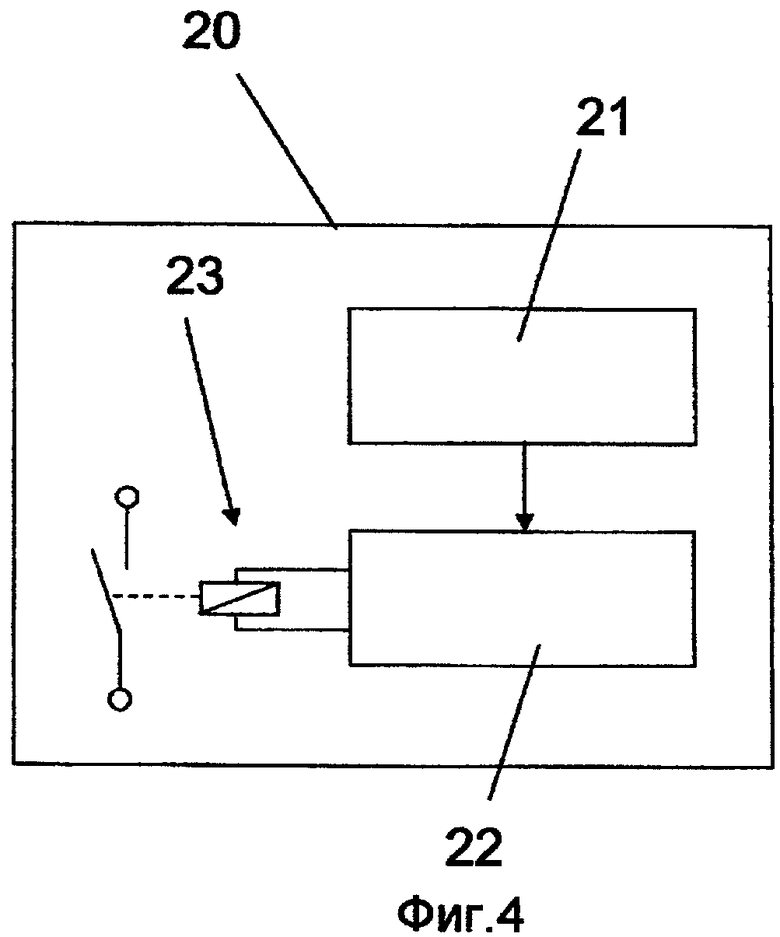
Устройство 1 транспортировки (вариант с устройством 10 манипулирования) дополнительно имеет устройство 20 слежения, которое выполнено в соответствии с вариантом осуществления, показанным на Фиг.3, с камерой 21 для генерации удаленных изображений.
Камера 21 может представлять собой, например, так называемую ВП камеру (времяпролетную камеру). Принцип ВП основан на измерении времени прохождения света. При этом излучается световой импульс и измеряется время, которое требуется свету для возвращения при его отражении от объекта. Таким образом, для каждого пикселя определяется расстояние по отношению к объекту, так что получается трехмерная структура сцены.
При приближении устройства транспортировки к станции обработки изображение ближайшего окружения соответствующей станции обработки захватывается камерой и генерируется соответствующий паттерн. Захват изображения выполняется около каждой станции обработки, так что фиксируются и изучаются рабочие условия для устройства манипулирования. Соответствующий захват изображения сначала выполняется, когда на устройствах не работает персонал (так называемый захват статического изображения).
Камера также может быть перемещена для фиксации полного набора условий. Если камера прикреплена к устройству обработки, она автоматически ориентируется в направлении выполнения операций устройством манипулирования.
Во время автоматической работы устройства транспортировки приближаются к станциям обработки на требуемое расстояние. Дополнительно, персонал лаборатории также имеет возможность работать в той же самой области, что и станции обработки. Для выполнения ручных операций со станциями обработки устройства обычно переключаются в сервисный режим или режим ручного управления. Поскольку нельзя исключить, что персонал также выполняет доступ или расположен в рабочей области блока манипулирования, эта рабочая область отслеживается камерой. Перед и во время осуществления операций манипулирования устройством манипулирования выполняется достаточно быстрая генерация новой информации изображения и ее сравнение со статическим изображением. Отклонения от исходного статического изображения, например, при появлении персонала в отслеживаемой области, достаточно быстро распознаются и приводят к выключению устройства манипулирования.
С этой целью устройство 20 слежения по Фиг.1 имеет, в дополнение к камере 21, выключатель 22, который взаимодействует со схемой 23 отключения для выключения устройства 10 манипулирования, если оно окажется ближе заданной дистанции безопасности.
Таким образом обеспечивается возможность оперативного обнаружения людей в рабочей области устройства манипулирования или на пути следования устройства транспортировки. Благодаря специально разработанному способу оценки (дифференциальный анализ изображения), случаи появления ближе минимальной дистанции безопасности быстро обнаруживаются и перемещения устройства манипулирования прекращаются с целью обеспечения безопасности. Помимо этого, могут быть установлены различные зоны безопасности таким образом, что при приближении человека сначала только уменьшается скорость устройства манипулирования. Области предупреждения и защиты могут быть сконфигурированы гибким образом.
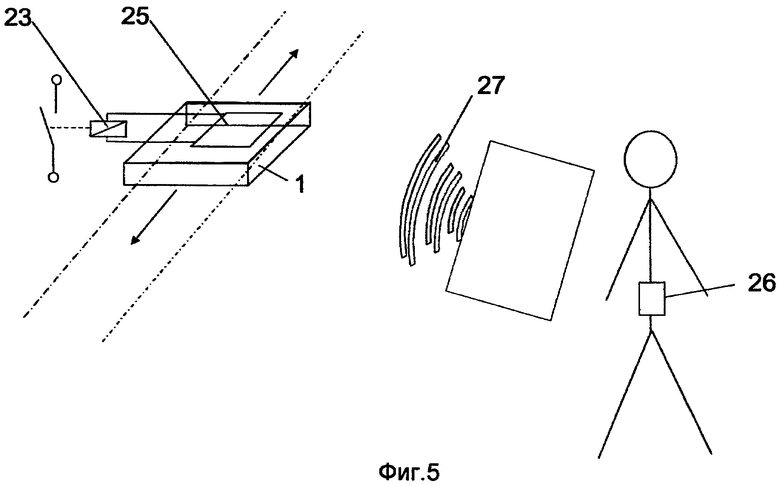
Для обеспечения соответствия требованиям на совместную работу человека и машины без защитных разделителей/защитных ограждений, также возможно обеспечить, взамен или дополнительно к устройству 20 слежения с камерой, систему определения местоположения, имеющую по меньшей мере один передатчик и по меньшей мере один приемник (см. Фиг.5). В этом случае, приемник 25 закреплен на подвижном устройстве 1 транспортировки и выполнен таким образом, что генерирует сигнал предупреждения, если по меньшей мере один передатчик 26 окажется от приемника на расстоянии, меньшем минимального.
Система определения местоположения обеспечивает возможность для лабораторного персонала носить передатчики 26, которые активируют сигнал предупреждения при приближении к приемнику 25, прикрепленному к устройству манипулирования или устройству транспортировки, и, через схему 23 отключения, переводит устройство 10 манипулирования в обесточенное состояние для обеспечения безопасности. Область, подлежащая отслеживанию, может быть сконфигурирована любым желаемым образом и может, например, составлять 1м вокруг приемника. Ношение передатчиков 26 является обязательным для персонала лаборатории и может отслеживаться с помощью дополнительного блока приемника в области входа (контроль доступа). Такой необязательный контроль доступа отслеживает наличие передатчиков у персонала при прохождении через двери в лабораторию или здание лаборатории и активирует, в случае необходимости, сигнал предупреждения. Помимо этого также возможно совмещение с автоматической блокировкой дверей.
3D (трехмерное) определение местоположения основано, например, на микроволновом измерении расстояния или на измерении разницы во времени прохождения радиосигнала 27 до различных приемников. По сравнению с использованием видеосистем такая технология не требует наличия визуального контакта с объектами или людьми, за которыми ведется слежение.
В соответствии с другим вариантом осуществления, система слежения может содержать устройство слежения за электрическим током и/или мощностью, которое следит за значениями тока и/или мощности устройства 10 манипулирования. В частности, отслеживаются и оцениваются токи привода или общая мощность, потребляемая устройством манипулирования. Предоставляются избыточные значения тока/мощности, и, если предельные значения не выдерживаются, приводы переводятся в обесточенное состояние для обеспечения безопасности. Потребляемая электрическая мощность блока манипулирования может быть ограничена, например, значением 80 Вт. Соответствие предельным значениям отслеживается указанным образом для обеспечения безопасности.
В лабораторной системе используется по меньшей мере одно из трех описанных выше устройств слежения, так что обеспечивается возможность косвенной кооперации или параллельной работы человека и машины без использования обычных защитных ограждений. При обеспечении множества различных устройств слежения уровень безопасности может быть дополнительно повышен.
Косвенная кооперация подразумевает, что персонал лаборатории может работать в той же самой пространственной области, в которой также выполняются автоматические процессы, включая автоматическую манипуляцию. Различные станции обработки вовлечены в автоматический процесс, но они также могут быть доступны для ручного управления. Теперь обеспечена возможность ручного управления рабочими станциями в любой момент времени, при этом соседние станции в то же самое время участвуют в автоматическом процессе.
Как только член персонала лаборатории приближается к опасной точке “автоматической манипуляции” или появляется в рабочем пространстве устройства манипуляции, автоматическая манипуляция прекращается. При этом принимаются во внимание все технические аспекты обеспечения безопасности.
Рабочее пространство устройства манипуляции не является фиксированным по положению, и, следовательно, слежение за рабочим пространством должно быть динамическим. Слежение, таким образом, связано с устройством транспортировки. Основываясь на устройстве транспортировки, обеспечивается слежение за ближайшим окружением для обеспечения безопасности. Ближайшее окружение связано с максимальным диапазоном блока манипуляции, и область слежения меняется соответственно.
Организация зон безопасности или безопасных рабочих областей не требует ни сложного оборудования, ни сложных операций. Степень сложности автоматизации также является низкой. В отличие от двумерных сканеров Pilz Safety Eye, сложность организации зон безопасности является значительно более низкой. При использовании системы определения местоположения также возможно слежение за областями, которые не могут обнаруживаться оптическими средствами (если человек выходит, например, из так называемой мертвой зоны, поскольку рабочая область блокирована устройством, которое должно работать).
Персонал лаборатории может свободно и безопасно перемещаться в пространстве, и при этом все устройства являются легкодоступными (отсутствуют заграждения и барьеры). Все коммерчески доступные лабораторные станции-манипуляторы могут быть свободно размещены в любом положении в пространстве и не должны окружаться защитными ограждениями.
Помимо этого, обеспечивается возможность одновременного или выборочного проведения ручных и/или автоматических манипуляций (транспортировки и обработки образцов) на одном или более устройствах обработки. Устройство транспортировки и манипулирование образцами с помощью устройства манипулирования преимущественно предусмотрены с одной стороны устройства обработки, тогда как управление осуществляется с другой стороны устройства обработки.
Ручная манипуляция может, например, подразумевать, что персонал лаборатории берет на себя функции устройства манипуляции, например, при перемещении из устройства транспортировки в устройство обработки. Однако также является возможным, если даже транспортировка образца в устройство обработки выполняется оператором/человеком. Ручная манипуляция разрешена главным образом в силу того, что система не требует каких-либо защитных ограждений, таких как защитные двери.
В другом варианте осуществления изобретения лабораторная система характеризуется расширяемой, ориентированной на текущие требования системой доставки, при этом одно или более устройств обработки выполнены подвижными и могут перемещаться именно туда, где они требуются. Таким образом, существуют следующие возможности:
а) устройство манипулирования на устройстве транспортировки перемещается к устройству обработки;
b) образцы транспортируются к стационарному устройству обработки;
с) устройства обработки перемещаются к оператору или к стационарному или подвижному устройству манипуляции.
Мобильные устройства обработки могут представлять собой, например, специальные измерительные системы, сепараторы образцов или другие устройства, смонтированные на устройстве транспортировки. Устройства обработки на устройстве транспортировки управляются таким же образом, как и устройства манипулирования - с помощью встроенного контроллера.
Таким образом, обеспечивается возможность дальнейшей оптимизации рабочих потоков в лаборатории посредством сокращения путей перемещения. Например, если подвижное устройство манипулирования связано с одним или более устройствами обработки вследствие большого количества образцов, подвижное устройство обработки также может переместиться и выполнять свои операции в рабочей области подвижного устройства манипулирования. Помимо этого, могут быть добавлены подвижные/мобильные устройства обработки для улучшения или ускорения потока образцов в требуемом месте. Более того, мобильные устройства обработки также могут приближаться к стационарным устройствам обработки.
Мобильные блоки обработки рассматриваются в качестве мобильных аппаратных сервисных блоков. Мобильные аппаратные сервисные блоки могут работать и могут использоваться локально в специфическом окружении, но также могут быть затребованы другими автоматическими ячейками. Соответственно, различные автоматические ячейки могут получить доступ к одним и тем же ресурсам (аппаратному сервису) и использовать их, как это требуется в соответствии с их возможностями. Каждая автоматическая ячейка (одна автоматическая ячейка может содержать одно или более устройств обработки или может представлять собой сложное автоматическое устройство) имеет информацию о доступных ресурсах и может запросить их. Соответственно, автоматическая ячейка может динамически расширяться по запросу. Также возможно соединять новые или доступные автоматические системы в свободно конфигурируемую систему.
Мобильные блоки не являются с необходимостью ассоциированными с автоматической ячейкой. Мобильный блок делает себя и, следовательно, свой сервис (аппаратный сервис) доступными. Каждый мобильный блок является самодостаточным и может быть обеспечен во множестве экземпляров, причем каждый независимый блок снабжается встроенным контроллером. Это позволяет организовать лабораторную сеть данных, автоматически интегрироваться в существующее окружение (извещать о своем присутствии) и управлять соответствующими перемещаемыми устройствами обработки или устройствами манипулирования.
Таким образом, система обеспечивает, в дополнение к стационарным устройствам обработки, к которым могут приближаться и выполнять операции мобильные устройства манипулирования, разнообразные и подвижные устройства обработки, которые могут использоваться любым способом, и могут динамически расширять систему.
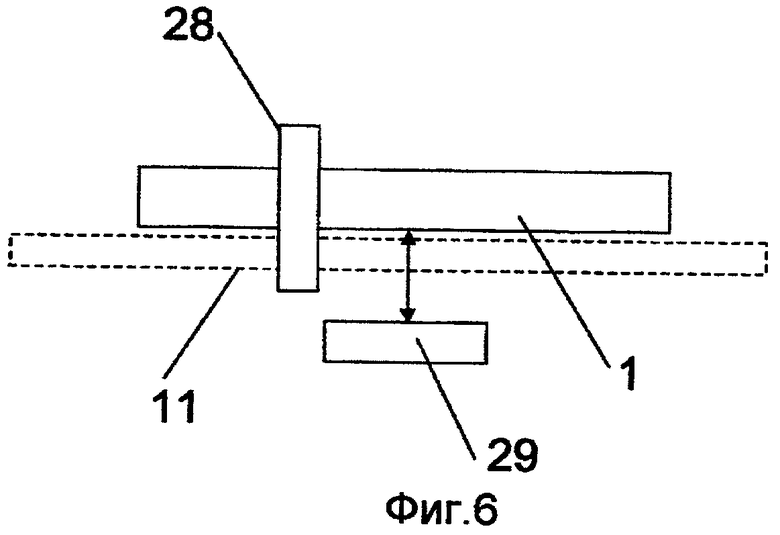
В другом варианте осуществления изобретения (Фиг.6), транспортная система имеет, помимо пути 11 транспортировки, один или несколько блоков 28 позиционирования, около которых устройства транспортировки могут быть остановлены в точно определенном положении. Блоки позиционирования предусмотрены главным образом в области устройств обработки и подъемных устройств для обеспечения точного манипулирования образцами и устройствами транспортировки.
Помимо этого, могут быть предусмотрены станции 29 зарядки, на которых могут заряжаться источники электропитания (в частности, конденсаторы или аккумуляторы) устройств транспортировки.
Путь транспортировки образует логическую связь между отдельными устройствами обработки (подготовки, анализа и т.п.) или автоматическими ячейками (например, лабораторная автоматическая система). Такой путь транспортировки выполняется в соответствии с правилами, которые поддерживают отдельные процессы и/или обеспечивают устройства обработки или автоматические ячейки, например, образцами.
Устройства транспортировки могут дополнительно иметь записываемые запоминающие устройства для типа образцов и/или устройств обработки, к которым следует приблизиться.
Устройство транспортировки принимает данные, относящиеся к следующему устройству обработки, к которому следует приблизиться, из своего встроенного контроллера. Внешняя система 13 управления управляет всеми возможными задачами и отвечает за доставку образцов в лаборатории. Связь системы 13 управления со встроенным контроллером осуществляется через радиоканал (WLAN, Bluetooth). Задачи, принимаемые встроенным контроллером, оцениваются в этом случае с помощью встроенного протокола устройства обработки и передаются на устройство транспортировки или устройство манипулирования. Встроенный контроллер передает информацию о новом маршруте в устройство транспортировки и, в конечном счете, разрешает начать движение. Встроенный контроллер также управляет устройством манипулирования. Сохраненные программы движения для устройства манипулирования активируются внешней системой 13 управления. Внешняя система управления также обладает информацией о соответствующем рабочем статусе устройства обработки и учитывает это при взаимодействии устройства манипулирования и устройства обработки, а также при определении оптимального маршрута для устройства транспортировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система определения местоположения объекта | 2018 |
|
RU2698409C1 |
| ЗАГРУЗОЧНАЯ СТАНЦИЯ ДЛЯ НАПОЛНЕНИЯ ЗАЩИТНОГО КЕЙСА, СЛУЖАЩЕГО ДЛЯ ТРАНСПОРТИРОВКИ ЦЕННЫХ ПРЕДМЕТОВ, И ЗАЩИТНЫЙ КЕЙС | 2020 |
|
RU2835791C1 |
| ОХРАННАЯ СИСТЕМА, СПОСОБ ИСКЛЮЧЕНИЯ УЩЕРБА ЗДОРОВЬЮ ПЕРСОНАЛА И КЛИЕНТОВ ПРИ ВООРУЖЕННЫХ ОГРАБЛЕНИЯХ ФИРМ, РАБОТАЮЩИХ С ЦЕННОСТЯМИ, И ИХ УТРАТЫ, СЕЙФ ОХРАННОЙ СИСТЕМЫ | 2005 |
|
RU2360291C2 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА АВАРИЙНО ГРЕЮЩИМИСЯ РОЛИКОВЫМИ БУКСОВЫМИ УЗЛАМИ КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2007 |
|
RU2337029C1 |
| Лаборатория мониторинга и диагностики контейнерная | 2021 |
|
RU2798301C2 |
| СПОСОБ, УСТРОЙСТВО И УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ КОНСТРУКЦИЙ ОБШИВКИ | 2007 |
|
RU2448876C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЮДЕЙ И/ИЛИ ПЕРЕДВИЖНЫХ МАШИН В ШАХТОВЫХ ПОЛОСТЯХ С ИСПОЛЬЗОВАНИЕМ RFID-ТЕХНОЛОГИИ И ИНЖЕНЕРНАЯ СИСТЕМА ВЫЕМКИ РУДЫ ИЗ ДЛИННОГО ОЧИСТНОГО ЗАБОЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ ДАННОГО СПОСОБА | 2011 |
|
RU2563859C2 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ДАННЫХ, СИСТЕМА И ПРИЕМНИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2214049C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ, СЦЕПЛЕН ЛИ ЛОКОМОТИВ ИЛИ ЖЕЛЕЗНОДОРОЖНАЯ ТЯГОВАЯ УСТАНОВКА С ЖЕЛЕЗНОДОРОЖНЫМ ВАГОНОМ ИЛИ ДРУГОЙ ТЯГОВОЙ УСТАНОВКОЙ | 2006 |
|
RU2417912C2 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
Лабораторная система содержит одно или более устройств транспортировки для образцов, по меньшей мере одно устройство обработки для подготовки, анализа и/или обработки образцов, по меньшей мере одно устройство манипулирования для манипулирования образцами в области устройства обработки и систему слежения для поддержания безопасного расстояния. Причем устройство манипулирования выполнено с возможностью переноса образца между устройством транспортировки и устройством обработки. Устройство манипулирования установлено на устройстве транспортировки и выполнено с возможностью его перемещения между по меньшей мере двумя устройствами обработки. Устройство слежения представляет собой систему слежения, которая перемещается с устройством манипулирования и которая содержит устройство слежения, включающее камеру для генерации удаленных изображений и/или систему определения местоположения, включающую по меньшей мере один передатчик и по меньшей мере один приемник. Причем приемник установлен на подвижном устройстве транспортировки и выполнен таким образом, что он генерирует предупреждающий сигнал, если по меньшей мере один передатчик оказывается по отношению к приемнику на дистанции, меньшей, чем минимальная. Изобретение обеспечивает возможность параллельной работы человека и машины без необходимости использования сложных защитных ограждений. 6 з.п. ф-лы, 6 ил.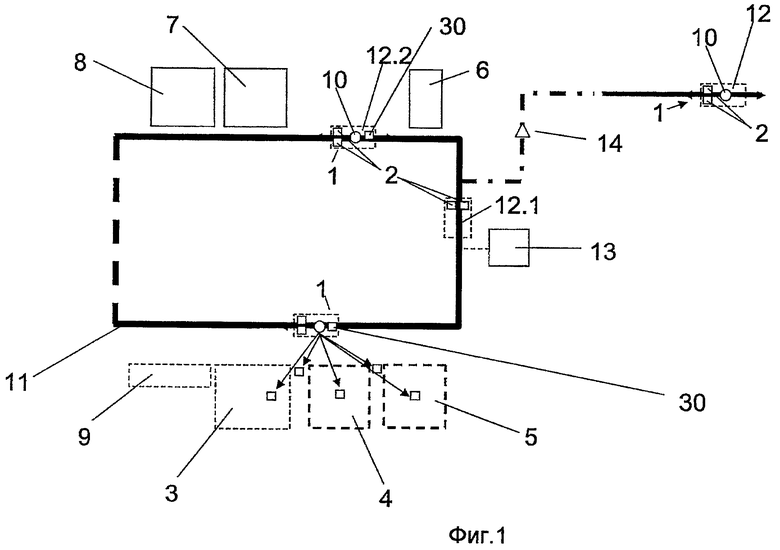
1. Лабораторная система, содержащая одно или более устройств (1) транспортировки для образцов (2), по меньшей мере одно устройство (3-9) обработки для подготовки, анализа и/или обработки образцов, по меньшей мере одно устройство (10) манипулирования для манипулирования образцами в области устройства обработки, причем устройство (10) манипулирования выполнено с возможностью переноса образца между устройством (1) транспортировки и устройством (3-9) обработки, и систему (30) слежения для поддержания безопасного расстояния, отличающаяся тем, что устройство (10) манипулирования установлено на устройстве транспортировки и выполнено с возможностью его перемещения между по меньшей мере двумя устройствами (3-9) обработки, и устройство слежения представляет собой систему (30) слежения, которая перемещается с устройством (10) манипулирования и которая содержит устройство (20) слежения, включающее в себя камеру (21) для генерации удаленных изображений и/или систему определения местоположения, имеющую по меньшей мере один передатчик (26) и по меньшей мере один приемник (25), причем приемник установлен на подвижном устройстве транспортировки и выполнен таким образом, что он генерирует предупреждающий сигнал, если по меньшей мере один передатчик оказывается по отношению к приемнику на дистанции, меньшей, чем минимальная.
2. Лабораторная система по п.1, отличающаяся тем, что система (30) слежения дополнительно содержит устройство слежения за электрическим током и/или мощностью, которое следит за значениями тока и/или мощности устройства (10) манипулирования.
3. Лабораторная система по п.1, отличающаяся тем, что по меньшей мере одно устройство обработки выполнено подвижным.
4. Лабораторная система по п.1, отличающаяся тем, что устройство (10) манипулирования выполнено с возможностью его перемещения на устройстве (1) транспортировки вместе с одним или более образцами (2).
5. Лабораторная система по п.1, отличающаяся тем, что дополнительно предусмотрено одно или более устройств (12.1) транспортировки, которые переносят только один или более образцов (2).
6. Лабораторная система по п.4, отличающаяся тем, что устройство (1) транспортировки выполнено самодвижущимся.
7. Лабораторная система по п.1, отличающаяся тем, что она предназначена для подготовки, анализа и/или обработки образцов цемента и/или обогащенной руды и полезных ископаемых, причем предусмотрены по меньшей мере некоторые из следующих устройств (3-9) обработки: приемная станция пневматической почты, мельница, пресс, устройства измерения степени измельчения, спектрометр и дифрактометр.
| US 20070005169 А1, 04.01.2007 | |||
| ЕР 0633207 А1, 11.01.1995 | |||
| DE 3208901 А1, 22.09.1983 | |||
| ТАРА ДЛЯ УПАКОВКИ ПАНЕЛЕЙ | 0 |
|
SU251441A1 |
| ЕР 01489425 В1, 14.02.2007. | |||

