Изобретение относится к области авиационного приборостроения и может быть использовано для получения информации о высотно-скоростных параметрах (ВСП) полета ЛА.
Известны устройства для измерения высотно-скоростных параметров ЛА, построенные на основе измерения статического давления с последующим его пневмомеханическим дифференцированием для получения информации о вертикальной скорости ЛА, рассмотренные в работах Браславского Д.А. Приборы и датчики летательных аппаратов. - М.: Машиностроение, 1970, 392 с. [1], Боднера В.А. Авиационные приборы. - М.: Машиностроение, 1969, 468 с. [2] и Авиационные приборы и измерительные системы / под ред. Воробьева М.: Машиностроение, 1981. - 392 с. [3]. При этом большинство из этих устройств используют приемники давления цилиндрической формы, на внешней поверхности которых в характерных радиальных сечениях расположены приемные отверстия, отстоящие от входной кромки приемника на расстоянии, определяемом эпюры распределения давления по оси приемника.
Применение таких устройств для получения информации о высотно-скоростных параметрах требует дополнительно измерения температуры воздуха на высоте полета и использование сложных алгоритмов и средств обработки первичных информативных сигналов, как это описано в работе Кравцова В.Г., Алексеева Н.В. Аэрометрия высотно-скоростных параметров ЛА // Приборы и системы управления, контроль, диагностика. 2000. №8. С.47-50 [4]. Кроме того, эти устройства обладают низкой помехоустойчивостью к скосам воздушного потока, как это отмечено в работе Петунина А.Н. Измерение параметров газового потока (Приборы для измерения давления, температуры и скорости). - М.: Машиностроение, 1974 г. - 260 с. [5], что особенно важно для малоразмерных ЛА, полет которых осуществляется, как правило, в условиях мелкомасштабной турбулентности, соизмеримой с его размерами, когда углы скоса потока достигают величины более ±30°, а амплитуда пульсаций скорости потока относительно его установившего значения может достигать более 30%.
Существенным недостатком этих устройств является использование приемников воздушных давлений внешнего обтекания с расположением элементов восприятия давлений на внешней поверхности приемника давлений, которые характеризуются низкой угловой помехоустойчивостью к скосам потока и по этой причине не могут быть использованы на малоразмерных ЛА, а также ограниченные функциональные возможности при использовании их на малоразмерных летательных аппаратах.
Наиболее близким по технической сущности к заявленному техническому решению, взятым за прототип, является система измерения высотно-скоростных параметров, описанная в работе Тюриной М.М., Порунова А.А. Система измерения высотно-скоростных параметров винтокрылых и сверхлегких летательных аппаратов // Изв. ВУЗов. Авиационная техника. 2007. №4. С.53-57 (рис.1) [6], состоящая из приемника воздушных давлений, в проточном канале которого размещены приемные отверстия по полному давлению приемника, генератор и регистрирующие элементы ионно-меточного канала, пневмомодуля аэрометрического канала, блока формирования первичных информативных сигналов и блока обработки выходных сигналов.
Приемник воздушных давлений системы измерения высотно-скоростных параметров включает каналы восприятия полного и статического давления. Приемные отверстия полного давления выполнены в виде цилиндрической щели, расположенной на конфузоре и сообщенной с осредняющей камерой, которая, в свою очередь, сообщается со струйным инвертором посредством пневматического канала. Выходы инвертора сообщены с измерительным и компенсационным модулями анемочувствительных элементов, включенных соответственно в свои измерительные схемы. При этом второй вход измерительного модуля сообщен с приемными отверстиями статического давления.
Элементы электродной системы ионно-меточного канала размещены в проточном канале приемника воздушных давлений. Электрод генератора ионной метки, которая представляет собой униполярно заряженную область, возникающую в результате искрового разряда, подключен к первому выходу схемы импульсного высоковольтного генератора. Второй выход генератора подсоединен к генератору стробирующих импульсов. Первый и второй регистрирующие электроды ионно-меточного преобразователя подключены соответственно к своим схемам формирователей прямоугольных импульсов, управляющих работой времязадающей схемы. Эта схема подает на селектор сигнал разрешения счета импульсов, поступающих от генератора счетных импульсов. Этот генератор совместно со схемой управления включает в работу блок генератора стробирующих импульсов, управляющих работой селектора таким образом, чтобы согласовать момент генерации метки с процессом ее регистрации. Это обеспечивает своевременность включения в работу счетчика импульсов. При этом на выходе счетчика формируется количество импульсов Nсч, пропорциональное промежутку времени Δt прохождения меткой базового расстояния L. Следовательно, число импульсов Nсч будет нести информацию об истинной воздушной скорости в соответствии со следующей зависимостью:
V=L/Δt.
Алгоритм обработки первичных сигналов блока обработки выходных сигналов включает операцию возведения в квадрат сигнала ионно-меточного канала по истинной воздушной скорости и умножения его на постоянный множитель 0,5, усиления и последующего деления на него сигнала аэрометрического канала, пропорционального скоростному напору q=0,5ρV2. На выходе блока обработки выходных сигналов формируются сигналы по плотности воздуха ρ на текущей высоте полета.
Существенным недостатком данного технического решения являются значительные температурные погрешности, ограниченная надежность, а также отсутствие возможности контроля режима работы измерительных каналов.
Технический результат, на достижение которого направлено заявляемое решение, заключается в повышении эффективности системы: повышении точности измерения высотно-скоростных параметров за счет уменьшения температурных погрешностей, надежности получения информативных сигналов, пропорциональных высотно-скоростным параметрам ЛА и непрерывного контроля режима работы измерительных каналов, а также обеспечение возможности адаптации измерительных каналов системы к меняющимся условиям полета.
Технический результат достигается за счет того, что в системе измерения высотно-скоростных параметров, состоящей из приемника воздушных давлений, в проточном канале которого размещены приемные отверстия по полному давлению приемника, генератор и регистрирующие элементы ионно-меточного канала, пневмомодуля аэрометрического канала, блока формирования первичных информативных сигналов и блока обработки выходных сигналов, новым является то, что в приемнике воздушных давлений дополнительно выполнены капиллярный делитель давления, а в проточном канале приемника приемные отверстия дросселированного давления, сообщенные с первым входом капиллярного делителя давлений, второй вход которого сообщен с приемными отверстиями по полному давлению приемника воздушных давлений, которые посредством пневматических каналов сообщены с пневмомодулем аэрометрического канала,
а в структуру системы дополнительно введены
пневмомодуль барометрического канала, пневматический вход которого сообщен с выходом капиллярного делителя давления по статическому давлению,
блок автокоррекции, первый и второй электрические входы которого подключены к четвертому и пятому выходам блока формирования первичных информативных сигналов, первый выход подсоединен к второму входу блока обработки выходных сигналов, причем его четвертый выход подключен к управляющему входу первого ключа, сигнальный выход которого соединен с генератором привода нагнетателя, вход которого соединен с источником электропитания U0, и к управляющему входу второго ключа, вход которого подсоединен к источнику электропитания U0, а его сигнальный выход подсоединен к электропневмоклапану,
электропневмоклапан, один из пневматических входов которого сообщен с приемными отверстиями дросселированного давления, а другой с приемными отверстиями по полному давлению приемника воздушных давлений и С первым входом пневмомодуля аэрометрического канала,
при этом первый и второй входы блока формирования первичных информативных сигналов подключены к первому и второму регистрирующим электродам ионно-меточного канала, а его первый выход - к генератору ионно-меточного канала,
третий и четвертый входы блока формирования первичных информативных сигналов подсоединены к первому и второму электрическим выходам пневмомодуля аэрометрического канала, а его пятый и шестой входы подключены к первому и второму выходам пневмомодуля барометрического канала,
причем второй его выход подключен к первому входу блока обработки выходных сигналов,
а выходами системы являются
третий выход блока формирования первичных информативных сигналов по числовому эквиваленту  истинной воздушной скорости,
истинной воздушной скорости,
первый выход блока обработки выходных сигналов по сигналу относительной плотности U=f(Δ), второй его выход по сигналу вертикальной скорости U=f(Vy) и третий выход по сигналу по барометрической высоте U=f{H},
первый выход блока автокоррекции по сигналу приборной скорости U=f(Vпр), второй его выход по сигналу контроля Z режима работы и управления индикацией системы и третий его выход по резервному сигналу барометрической высоты U=f(Hp).
Пневмомодуль аэрометрического канала содержит струйный инвертор, струйно-конвективный модуль по полному давлению и струйно-конвективный модуль по дросселированному давлению,
при этом первый вход пневмомодуля аэрометрического канала по полному давлению сообщен с входом струйного инвертора, второй вход которого сообщен с выходом струйно-конвективного модуля по полному давлению, а второй вход сообщен с выходом струйно-конвективного модуля по дросселированному давлению,
причем входы струйно-конвективного модуля по дросселированному давлению и струйно-конвективного модуля по полному давлению, а также выход струйного инвертора сообщены с окружающей средой,
а электрические выходы струйно-конвективного модуля по дросселированному давлению и струйно-конвективного модуля по полному давлению являются соответственно первым и вторым электрическими выходами пневмомодуля аэрометрического канала.
Пневмомодуль барометрического канала содержит двухтактный микронагнетатель, измерительный и компенсационный струйно-конвективные модули,
при этом полости повышенного давления двухтактного микронагнетателя сообщены с пневматическим входом пневмомодуля барометрического канала и с входом измерительного струйно-конвективного модуля, пневматический выход которого сообщен с входом компенсационного струйно-конвективного модуля и полостями пониженного давления двухтактного микронагнетателя, управляющий вход которого является электрическим входом пневмомодуля барометрического канала,
кроме того, электрический выход измерительного струйно-конвективного модуля является первым электрическим выходом, а электрический выход компенсационного струйно-конвективного модуля является вторым электрическим выходом пневмомодуля барометрического канала.
Блок формирования информативных сигналов содержит
электронный модуль ионно-меточного канала, первый вход которого соединен со вторым, а второй с первым входами блока формирования информативных сигналов, при этом первый выход электронного модуля ионно-меточного канала соединен с первым, второй - с третьим, а третий - со вторым выходами блока формирования информативных сигналов,
электронный модуль аэрометрического канала, первый и второй входы которого соединены с третьим и четвертым входами, а выход - с четвертым выходом блока формирования информативных сигналов,
и электронный модуль барометрического канала, первый и второй входы которого соединены с пятым и шестым входами, первый выход с пятым выходом блока формирования информативных сигналов, а второй выход - с третьим входом электронного модуля аэрометрического канала.
Электронный модуль аэрометрического канала содержит первую и вторую электроизмерительную схемы, первый и второй дифференциальные усилители, сумматор, фильтр нижних частот и делитель напряжения,
причем первый вход электронного модуля аэрометрического канала подсоединен к первой электроизмерительной схеме, второй вход - ко второй электроизмерительной схеме, третий вход - ко вторым входам первого и второго дифференциальных усилителей, на первые входы которых соответственно подсоединены выходы первой и второй электроизмерительных схем, и ко второму входу делителя напряжения,
при этом выходы первого и второго дифференциальных усилителей подключены соответственно к первому и второму входам сумматора, выход которого через фильтр низких частот подсоединен к первому входу делителя напряжения, выход которого является выходом электронного модуля аэрометрического канала.
Электронный модуль барометрического канала содержит электроизмерительную схему, компенсационную электроизмерительную схему, вычитатель, фильтр нижних частот, делитель напряжения,
причем первый вход электронного модуля барометрического канала подсоединен к входу электроизмерительной схемы, выход которой подключен к первому входу вычитателя, второй вход электронного модуля барометрического канала подсоединен к входу компенсационной электроизмерительной схемы, выход которой является вторым выходом электронного модуля барометрического канала по сигналу компенсирующего напряжения и подсоединен на второй вход вычитателя, а также на второй вход делителя, на первый вход которого через фильтр нижних частот подсоединен выход вычитателя,
при этом выход делителя является первым выходом электронного модуля барометрического канала.
Блок обработки выходных сигналов содержит соединенные между собой делитель напряжения, квадрататор, функциональный преобразователь, дифференциатор, масштабирующее звено, задатчик температуры на начальной высоте полета, задатчик градиента температуры по высоте,
При этом первый и второй входы блока обработки выходных сигналов соответственно соединены с первым и вторым входами делителя напряжения, выход которого соединен со входом квадрататора, выходной сигнал с которого, являющийся выходом системы по сигналу относительной плотности U=f(Δ), подключен к первому входу функционального преобразователя, на второй вход которого подключен выход с задатчика температуры на начальной высоте полета, а на третий вход - выход с задатчика градиента температуры по высоте, при этом выход функционального преобразователя, являющийся третьим выходом системы по сигналу барометрической высоты U=f(H), подсоединен одновременно на вход дифференциатора и на второй вход масштабирующего звена с управляемым коэффициентом передачи, на первый вход которого подключен выход дифференциатора, при этом выход масштабирующего звена является вторым выходом блока обработки выходных сигналов по сигналу вертикальной скорости U=f{Vy).
Блок автокоррекции содержит
модуль автокоррекции аэрометрического канала, первый вход которого соединен с первым входом блока автокоррекции, а первый и второй выходы соединены соответственно с первым и вторым выходами блока автокоррекции,
модуль автокоррекции барометрического канала, первый вход которого соединен со вторым входом, а выход соединен с третьим выходом блока автокоррекции по резервному сигналу барометрической высоты,
модуль управления периодичностью автокоррекции, вход которого соединен со вторым входом блока автокоррекции, а выход, являющийся четвертым выходом блока автокоррекции, подключен ко вторым входам модуля автокоррекции аэрометрического канала и модуля автокоррекции барометрического канала.
Модуль автокоррекции аэрометрического канала содержит схему коррекции, генератор счетных импульсов, компаратор, реверсивный счетчик, преобразователь код-аналог,
при этом первый вход модуля автокоррекции аэрометрического канала соединен с первым входом схемы коррекции, на второй вход которой подсоединен выход преобразователя код-аналог, выход схемы коррекции является первым выходом модуля автокоррекции аэрометрического канала по сигналу приборной скорости U=f(Vпр), а также подсоединен к входу компаратора, выход которого соединен с первым входом реверсивного счетчика, второй вход которого подключен к генератору счетных импульсов.
При этом первый выход реверсивного счетчика является первым выходом модуля автокоррекции аэрометрического канала по сигналу Z контроля режима работы и управления индикацией, а второй подсоединен к входу преобразователя код-аналог.
Кроме того, второй вход модуля автокоррекции аэрометрического канала подсоединен к третьему входу реверсивного счетчика.
Модуль автокоррекции барометрического канала содержит схему коррекции, компаратор, реверсивный счетчик, генератор счетных импульсов, преобразователь код-аналог,
причем первый вход модуля автокоррекции барометрического канала соединен с первым входом схемы коррекции, на второй вход которой подключен выход преобразователя код-аналог.
При этом выход схемы коррекции одновременно является первым выходом модуля автокоррекции барометрического канала по резервному сигналу барометрической высоты U=f(Hp) и подсоединен к входу компаратора, выход которого совместно с выходом генератора счетных импульсов подключены соответственно к первому и второму входам реверсивного счетчика, выход которого соединен с входом преобразователя код-аналог.
Кроме того, третий вход реверсивного счетчика соединен с вторым входом модуля автокоррекции барометрического канала.
Модуль управления периодичностью автокоррекции содержит дифференциатор, масштабирующее звено, сумматор, компаратор, генератор управляющих сигналов, таймер.
При этом вход модуля управления периодичностью автокоррекции одновременно подсоединен к входу дифференциатора и к входу масштабирующего звена, выходы которых соответственно подключены к первому и второму входам сумматора, выход которого соединен с входом компаратора, выход которого совместно с выходом таймера подключены соответственно к первому и второму входам генератора управляющих сигналов, выход которого является выходом модуля управления периодичностью автокоррекции.
Сущность изобретения поясняется на чертежах, где фиг.1 - структурно-функциональная системы измерения высотно-скоростных параметров летательного аппарата, фиг.2 - структурная схема модуля автокоррекции аэрометрического канала, фиг.3 - структурная схема модуля автокоррекции барометрического канала, фиг.4 - структурная схема модуля управления периодичностью автокоррекции.
Здесь:
1 - приемник воздушных давлений;
2 - приемные отверстия полного давления;
3 - генератор ионно-меточного канала;
4 - первый регистрирующий элемент ионно-меточного канала;
5 - второй регистрирующий элемент ионно-меточного канала;
6 - пневмомодуль аэрометрического канала;
7 - блок формирования первичных информативных сигналов;
8 - блок обработки выходных сигналов;
9 - приемные отверстия дросселированного давления;
10 - капиллярный делитель давления;
11 - пневматический канал дросселированного давления;
12 - пневмомодуль барометрического канала;
13 - блок автокоррекции;
14 - первый ключ;
15 - генератор привода нагнетателя;
16 - второй ключ;
17 - электропневмоклапан;
18 - струйный инвертор;
19 - струйно-конвективный модуль по полному давлению;
20 - струйно-конвективный модуль по дросселированному давлению;
21 - двухтактный микронагнетатель;
22 - измерительный струйно-конвективный модуль барометрического канала;
23 - компенсационный струйно-конвективный модуль барометрического канала;
24 - полости повышенного давления;
25 - полости пониженного давления;
26 - электронный модуль ионно-меточного канала;
27 - электронный модуль аэрометрического канала;
28 - электронный модуль барометрического канала;
29 - первая электроизмерительная схема электронного модуля аэрометрического канала;
30 - вторая электроизмерительная схема электронного модуля аэрометрического канала;
31 - первый дифференциальный усилитель электронного модуля аэрометрического канала;
32 - второй дифференциальный усилитель электронного модуля аэрометрического канала;
33 - сумматор электронного модуля аэрометрического канала;
34 - фильтр нижних частот электронного модуля аэрометрического канала;
35 - делитель напряжения электронного модуля аэрометрического канала;
36 - электроизмерительная схема электронного модуля барометрического канала;
37 - компенсационная электроизмерительная электронного модуля барометрического канала;
38 - вычитатель электронного модуля барометрического канала;
39 - фильтр нижних частот электронного модуля барометрического канала;
40 - делитель напряжения электронного модуля барометрического канала;
41 - делитель напряжения блока обработки выходных сигналов
42 - квадрататор;
43 - функциональный преобразователь блока обработки выходных сигналов;
44 - дифференциатор блока обработки выходных сигналов;
45 - масштабирующее звено с управляемым коэффициентом передачи;
46 - задатчик температуры на начальной высоте полета;
47 - задатчик градиента температуры по высоте полета;
48 - модуль автокоррекции аэрометрического канала;
49 - модуль автокоррекции барометрического канала;
50 - модуль управления периодичностью автокоррекции;
51 - схема коррекции блока автокоррекции аэрометрического канала;
52 - генератор счетных импульсов блока автокоррекции аэрометрического канала;
53 - компаратор блока автокоррекции аэрометрического канала;
54 - реверсивный счетчик блока автокоррекции аэрометрического канала;
55 - преобразователь код-аналог блока автокоррекции аэрометрического канала;
56 - схема коррекции блока автокоррекции барометрического канала;
57 - компаратор блока автокоррекции барометрического канала;
58 - реверсивный счетчик блока автокоррекции барометрического канала;
59 - генератор счетных импульсов блока автокоррекции барометрического канала;
60 - преобразователь код-аналог блока автокоррекции барометрического канала;
61 - дифференциатор блока управления периодичностью автокоррекции;
62 - масштабирующее звено блока управления периодичностью автокоррекции;
63 - сумматор блока управления периодичностью автокоррекции;
64 - компаратор блока управления периодичностью автокоррекции;
65 - генератор управляющих сигналов;
66 - таймер.
Система измерения высотно-скоростных параметров, состоящая из приемника воздушных давлений 1, в проточном канале которого размещены приемные отверстия 2 по полному давлению приемника, генератор 3 и регистрирующие элементы 4 и 5 ионно-меточного канала, пневмомодуля 6 аэрометрического канала, блока 7 формирования первичных информативных сигналов, блока обработки 8 выходных сигналов, а также пневмомодуля 12 барометрического канала, блока 13 автокоррекции и электропневмоклапана 17.
В приемнике 1 воздушных давлений выполнены капиллярный делитель 10 давлений и в проточном канале приемника 1 приемные отверстия 9 дросселированного давления, сообщенные с первым входом капиллярного делителя 10 давлений, второй вход которого сообщен с приемными отверстиями 2 по полному давлению приемника 1 воздушных давлений, а также посредством пневматических каналов 11 с пневмомодулем 6 аэрометрического канала.
При этом пневматический вход пневмомодуля 12 барометрического канала сообщен с выходом капиллярного делителя 10 давления по статическому давлению.
Первый и второй электрические входы блока 13 автокоррекции подключены к четвертому и пятому выходам блока 7 формирования первичных информативных сигналов. Первый выход подсоединен к второму входу блока 8 обработки выходных сигналов, а его четвертый выход подключен к управляющему входу первого ключа 14, сигнальный выход которого соединен с генератором 15 привода нагнетателя, вход которого соединен с источником электропитания U0, и к управляющему входу второго ключа 16, вход которого подсоединен к источнику электропитания U0, а его сигнальный выход подсоединен к электропневмоклапану 17.
Первый пневматический вход электропневмоклапана 17 сообщен посредством пневматического канала 11 с приемными отверстиями 9 дросселированного давления, а второй его пневматический вход сообщен с приемными отверстиями 2 по полному давлению приемника 1 воздушных давлений и с первым входом пневмомодуля 6 аэрометрического канала.
При этом первый и второй входы блока 7 формирования первичных информативных сигналов подключены к первому и второму регистрирующим электродам ионно-меточного канала, а его первый выход к генератору ионно-меточного канала, третий и четвертый входы блока 7 формирования первичных информативных сигналов подсоединены к первому и второму электрическим выходам пневмомодуля 6 аэрометрического канала, а пятый и шестой входы подключены к первому и второму выходам пневмомодуля 12 барометрического канала, причем второй его выход подключен к первому входу блока обработки 8 выходных сигналов.
Выходами системы являются
третий выход по числовому эквиваленту  истинной воздушной скорости блока 7 формирования первичных информативных сигналов,
истинной воздушной скорости блока 7 формирования первичных информативных сигналов,
первый выход по сигналу относительной плотности U=f(Δ), второй выход по сигналу вертикальной скорости U=f(Vy) и третий выход по сигналу по барометрической высоте U=f(H) блока обработки 8 выходных сигналов,
первый выход по сигналу приборной скорости U=f(Vпр), второй выход по сигналу Z контроля режима работы и управления индикацией системы и третий выход по резервному сигналу барометрической высоты U=f(Hp) блока 13 автокоррекции.
Пневмомодуль 6 аэрометричесого канала содержит струйный инвертор 18, струйно-конвективный модуль 19 по полному давлению и струйно-конвективный модуль 20 по дросселированному давлению. Первый вход пневмомодуля 6 аэрометрического канала по полному давлению сообщен с входом струйного инвертора 18, второй вход которого сообщен с выходом струйно-конвективного модуля 19 по полному давлению, а второй вход сообщен с выходом струйно-конвективного модуля 20 по дросселированному давлению.
Входы струйно-конвективного модуля 20 по дросселированному давлению и струйно-конвективного модуля 19 по полному давлению, а также выход струйного инвертора 18 сообщены с окружающей средой.
Электрические выходы струйно-конвективного модуля 20 по дросселированному давлению и струйно-конвективного модуля 19 по полному давлению являются электрическими выходами пневмомодуля 6 аэрометрического канала.
Пневмомодуль 12 барометрического канала содержит двухтактный микронагнетатель 21, измерительный 22 и компенсационный 23 струйно-конвективные модули. Полости 24 повышенного давления двухтактного микронагнетателя 21 сообщены с пневматическим входом пневмомодуля 12 барометрического канала и с входом измерительного 22 струйно-конвективного модуля, пневматический выход которого сообщен с входом компенсационного 23 струйно-конвективного модуля и полостями 25 пониженного давления двухтактного микронагнетателя 21. Управляющий вход двухтактного микронагнетателя 21 подключен к сигнальному входу первого ключа 14, сигнальный вход которого подключен к источнику электропитания U0.
Электрический выход измерительного 22 струйно-конвективного модуля является первым электрическим выходом, а электрический выход компенсационного 23 струйно-конвективного модуля является вторым электрическим выходом пневмомодуля 12 барометрического канала.
Блок 7 формирования информативных сигналов содержит электронный модуль 26 ионно-меточного канала, электронный модуль 27 аэрометрического канала и электронный модуль 28 барометрического канала.
Первый вход электронного модуля 26 ионно-меточного канала соединен со вторым, а второй с первым входами блока 7 формирования информативных сигналов. При этом первый выход электронного модуля 26 ионно-меточного канала соединен с первым, второй - с третьим, а третий - со вторым выходами блока 7 формирования информативных сигналов.
Первый и второй входы электронного модуля 27 аэрометрического канала соединены с третьим и четвертым входами, а выход - с четвертым выходом блока 7 формирования информативных сигналов.
Первый и второй входы электронного модуля 28 барометрического канала соединены с пятым и шестым входами, а его первый выход соединен с пятым выходом блока 7 формирования информативных сигналов, а второй выход электронного модуля 28 барометрического канала соединен с третьим входом электронного модуль 27 аэрометрического канала.
Электронный модуль 27 аэрометрического канала содержит первую 29 и вторую 30 электроизмерительную схемы, первый 31 и второй 32 дифференциальные усилители, сумматор 33, фильтр нижних частот 34 и делитель 35 напряжения.
Первый вход электронного модуля 27 аэрометрического канала подсоединен к первой 29 электроизмерительной схеме, второй его вход - к второй 30 электроизмерительной схеме, а третий вход подсоединен к вторым входам первого 31 и второго 32 дифференциальных усилителей. На первые входы дифференциальных усилителей 31 и 32 соответственно подсоединены выходы первой 29 и второй 30 электроизмерительных схем, и ко второму входу делителя 35 напряжения.
При этом выходы первого 31 и второго 32 дифференциальных усилителей подключены соответственно к первому и второму входам сумматора 33, выход которого через фильтр низких частот 34 подсоединен к первому входу делителя 35 напряжения, выход которого является выходом электронного модуля 27 аэрометрического канала.
Электронный модуль 28 барометрического канала содержит электроизмерительную схему 36, компенсационную электроизмерительную схему 37, вычитатель 38, фильтр нижних частот 39, делитель 40 напряжения.
Причем первый вход электронного модуля 28 барометрического канала подсоединен к входу электроизмерительной схемы 36, выход которой подключен к первому входу вычитателя 38. Второй вход электронного модуля 28 барометрического канала подсоединен к входу компенсационной электроизмерительной схемы 37, выход которой является вторым выходом электронного модуля 28 барометрического канала по сигналу компенсирующего напряжения и подсоединен на второй вход вычитателя 38, а также на второй вход делителя 40. На первый вход делителя 40 через фильтр нижних частот 39 подсоединен выход вычитателя 38. При этом выход делителя 40 является первым выходом электронного модуля 28 барометрического канала.
Блок 8 обработки выходных сигналов содержит соединенные между собой 41 делитель напряжения, квадрататор 42, функциональный преобразователь 43, дифференциатор 44, масштабирующее звено 45, задатчик температуры 46 на начальной высоте полета, задатчик 47 градиента температуры по высоте.
Причем первый и второй входы блока 8 обработки выходных сигналов соответственно соединены с первым и вторым входами делителя 41 напряжения, выход которого соединен с входом квадрататора 42, выходной сигнал с которого, являющийся выходом системы по сигналу относительной плотности U=f(Δ), подключен к первому входу функционального преобразователя 43. На второй вход функционального преобразователя 43 подключен выход с задатчика 46 температуры на начальной высоте полета, а на третий вход - выход с задатчика 47 градиента температуры по высоте. Выход функционального преобразователя 43, являющийся третьим выходом системы по сигналу барометрической высоты U=f(H), подсоединен одновременно на вход дифференциатора 44 и на второй вход масштабирующего звена 45 с управляемым коэффициентом передачи, на первый вход которого подключен выход дифференциатора 44. При этом выход масштабирующего звена 45 является вторым выходом блока 8 обработки выходных сигналов по сигналу вертикальной скорости U=f(Vy).
Блок 13 автокоррекции содержит модуль 48 автокоррекции аэрометрического канала, модуль 49 автокоррекции барометрического канала и модуль 50 управления периодичностью автокоррекции.
Первый вход модуля 48 автокоррекции аэрометрического канала соединен с первым входом блока 13 автокоррекции, а первый и второй выходы с первым и вторым выходами блока 13 автокоррекции.
Первый вход модуля 49 автокоррекции барометрического канала соединен со вторым входом, а выход соединен с третьим выходом блока 13 автокоррекции.
Вход модуля 50 управления периодичностью автокоррекции соединен со вторым входом блока 13 автокоррекции, а выход, являющийся четвертым выходом блока 13 автокоррекции, подключен ко вторым входам модуля 48 автокоррекции аэрометрического канала и модуля 49 автокоррекции барометрического канала.
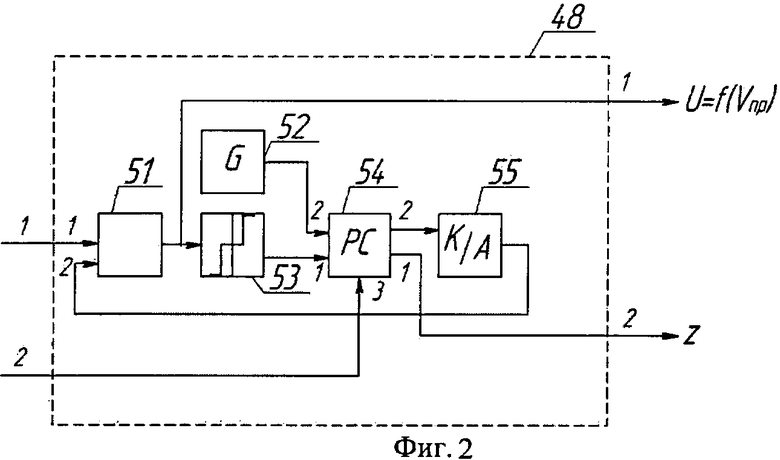
Модуль 48 автокоррекции аэрометрического канала содержит схему коррекции 51, генератор счетных импульсов 52, компаратор 53, реверсивный счетчик 54, преобразователь код-аналог 55.
Первый вход модуля 48 автокоррекции аэрометрического канала соединен с первым входом схемы коррекции 51, на второй вход которой подсоединен выход преобразователя код-аналог 55. Выход схемы коррекции 51 является первым выходом модуля 48 автокоррекции аэрометрического канала по сигналу приборной скорости U=f(Vпр), а также подсоединен к входу компаратора 53, выход которого соединен с первым входом реверсивного счетчика 54, второй вход которого подключен к генератору счетных импульсов 52.
При этом первый выход реверсивного счетчика 54 является первым выходом модуля 48 автокоррекции аэрометрического канала по сигналу контроля Z режима работы и управления индикацией, а второй выход счетчика 54 подсоединен к входу преобразователя код-аналог 55.
Кроме того, второй вход модуля 48 автокоррекции аэрометрического канала подсоединен к третьему входу реверсивного счетчика 54.
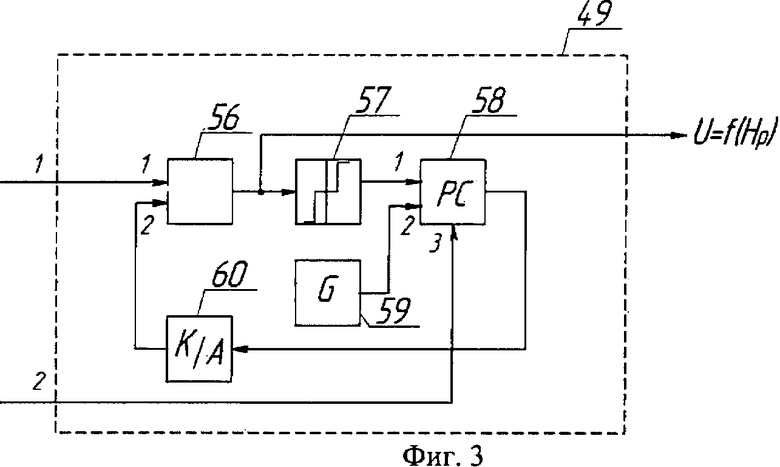
Модуль 49 автокоррекции барометрического канала содержит схему коррекции 56, компаратор 57, реверсивный счетчик 58, генератор счетных импульсов 59, преобразователь код-аналог 60.
Причем первый вход модуля 49 автокоррекции барометрического канала соединен с первым входом схемы коррекции 56, на второй вход которой подключен выход преобразователя код-аналог 60.
Выход схемы коррекции 56 одновременно является первым выходом модуля 53 автокоррекции барометрического канала по резервному сигналу барометрической высоты U=f(Hр) и подсоединен к входу компаратора 57, выход которого совместно с выходом генератора счетных импульсов 59 подключены к первому и второму входам реверсивного счетчика 58, выход которого соединен с входом преобразователя код-аналог 60.
Третий вход реверсивного счетчика 58 соединен со вторым входом модуля 49 автокоррекции барометрического канала.
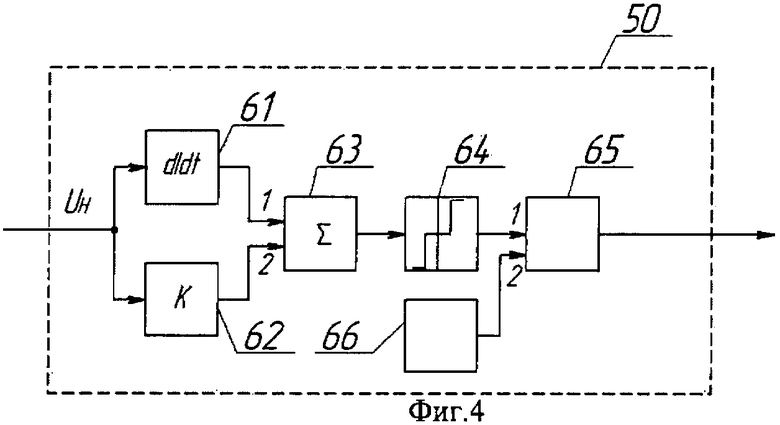
Модуль 50 управления периодичностью автокоррекции содержит дифференциатор 61, масштабирующее звено 62, сумматор 63, компаратор 64, генератор управляющих сигналов 65, таймер 66.
Вход модуля 50 управления периодичностью автокоррекции одновременно подсоединен к входу дифференциатора 61 и ко входу масштабирующего звена 62, выходы которых соответственно подключены к первому и второму входам сумматора 63, выход которого соединен с входом компаратора 64, выход которого совместно с выходом таймера 66 подключены соответственно к первому и второму входам генератора управляющих сигналов 65, выход которого является выходом модуля 50 управления периодичностью автокоррекции.
Система измерения высотно-скоростных параметров летательного аппарата работает в двух режимах: измерения и автокоррекции, сигнализация о которых осуществляется с помощью сигнала контроля Z режима работы и управления индикацией, формируемого на выходе блока 13 автокоррекции.
В процессе полета и при работе устройства в режиме измерения проточный приемник потока 1, взаимодействуя с набегающим воздушным потоком, деформирует его таким образом, что в результате в проточном канале формируется осесимметричная струя, параметры который воспринимаются приемными отверстиями 2 полного давления рп и приемными давлениями 9 дросселированного давления рд. На выходе приемных отверстий формируется перепад давления, подаваемый на капиллярный делитель 10 давлений, на выходе которого формируется сигнал по статическому давлению рс, подаваемый далее на вход пневмомодуля 12 барометрического канала. Кроме того, полное давление рп подается на первый вход, а дросселированное давление рд на второй вход пневмомодуля 6 аэрометрического канала. Эти давления рп и рд подаются соответственно на вход струйного инвертора 18, первый выход которого сообщен с условно статическим давлением рус салона летательного аппарата, и на выход струйно-конвективного модуля 20 по дросселированному давлению. Давление рин≈рп со второго выхода струйного инвертора 18 подается на выход струйно-конвективного модуля 19 по полному давлению. На входы обоих струйно-конвективных модулей подается условно статическое давление рус. В результате на каждом из струйно-конвективных модулей 19 и 20 возникают перепады давления, равные Δрп=рус-рин и Δрд=рус-рд. Эти перепады давления вызывают однонаправленное перетекание воздуха одинаковой плотности ρН и температуры Тн с расходом Gп и Gд.
Таким образом, тепловое состояние (температура) анемочувствительных элементов струйно-конвективных модулей 19 и 20 определяется расходами Gп и которые несут информацию о скоростном напоре Δрп и Δрд.
Анемочувствительных элементов струйно-конвективных модулей 19 и 20 включены в свои электроизмерительные схемы 29 и 30, расположенные в электронном модуле 27 аэрометрического канала, являющегося частью блока 7 формирования первичных информативных сигналов. На выходе электроизмерительных схем 29 и 30 формируются соответственно напряжения U=f(Gп, T) и U=f(Gд, T), которые подаются на первые входы дифференциальных усилителей 31 и 32.
На вторые входы этих схем, а также на второй вход делителя 35 со второго выхода электронного модуля 28 барометрического канала подается напряжение U=f(T), пропорциональное температуре окружающей среды для коррекции измеренного значения напряжения по аддитивной и мультипликативной составляющих температурной погрешности. Выходные сигналы с дифференциальных усилителей для повышения чувствительности и расширения диапазона в сторону измерения малых скоростей подаются на сумматор 33 и через фильтр 34 нижних частот на делитель 35, на выходе которого формируется выходной сигнал электронного модуля 27 аэрометрического канала по приборной скорости Vпр, в достаточной мере свободный от аддитивной и мультипликативной составляющих температурной погрешности и обеспечивающий повышение чувствительности.
Выходной сигнал электронного модуля 27 аэрометрического канала поступает на первый вход модуль 48 автокоррекции аэрометрического канала блока 13 автокоррекции, на выходе которого в режиме автокоррекции формируется сигнал по приборной скорости U=f(Vпр), свободный от обеих составляющих остаточной температурной погрешности.
Кроме того, этот сигнал подается на второй вход блока 8 обработки выходных сигналов.
Осесимметричная струя воздуха во время движения внутри проточного канала приемника 1 воздушных давлений взаимодействует также с генератором 3 метки ионно-меточного канала и переносит униполярный заряд в область регистрирующих электродов 4 и 5 со скоростью V этой струи, зависящей от истинной воздушной скорости поступательного движения ЛА. В каждом из регистрирующих электродов 4 и 5 последовательно и поочередно формируется импульсы напряжения, сдвинутые во времени на интервал времени Δt, определяемый скоростью V и базовым расстоянием L и которые поступают в электронный модуль 26 ионно-меточного канала, структурное построение и процессы в котором аналогичны, описанным в работе [6]. На выходе электронного модуля 26 ионно-меточного канала формируются импульсы напряжений, временной сдвиг которых несет информацию об истинной воздушной скорости U=f(Vист), и этот сигнал подается на первый вход блока 8 обработки выходных сигналов.
В основу алгоритма получения информации по относительной плотности в блоке 8 обработки выходных сигналов положена следующая зависимость - [1, 325; 2, с.333]
На вход делителя 41 подается сигнал по истинной воздушной скорости Vист (делимое) с первого входа блока 8 обработки выходных сигналов, на второй вход делителя 41 подается сигнал по приборной скорости Vпр (делитель) со второго входа блока 8 обработки выходных сигналов. На выходе делителя 41 формируется сигнал, который после возведения его в квадрат в блоке 42, используется для получения сигнала по относительной плотности U=f(Δ), являющегося одним из выходных сигналов системы.
В основу алгоритма получения барометрической высоты Нб положена зависимость [6]
Функциональный преобразователь 43 реализует зависимость (2), и на его входы подаются: на первый вход сигнал по относительной плотности с выхода квадрататора 42, на второй вход сигнал по температуре T0 на уровне Земли от задатчика температуры 46 и на третий вход сигнал по высотному градиенту температуры τ от задатчика 47. В результате обработки на выходе функционального преобразователя 43 формируется выходной сигнал системы по барометрической высоте U=f(Нб).
Для получения сигнала по вертикальной скорости Vy по зависимости
выходной сигнал с функционального преобразователя 43 подается на дифференциатор 44, и на подсоединенное к выходу дифференциатора 44, масштабирующее звено 45 с переменным коэффициентом передачи KH для коррекции сигнала по высоте. На выходе масштабирующего звена 45 формируется выходной сигнал системы по вертикальной скорости U=f(Vy).
Для получения электрического сигнала, пропорционального относительной плотности, необходимого для получения резервного сигнала по высоте, а также управления периодичностью автокоррекции используются дополнительно введенные пневмомодуль барометрического канала 12 и электронный модуль 28 барометрического канала. При этом сигнал по статическому давлению рс, поступающий от капиллярного делителя 10 давлений и связанный с высотой полета Н, подается в полости повышенного 24 и пониженного 25 давления двухтактного микронагнетателя 21, подключенного через ключ 14 к генератору 15 привода нагнетателя, формирующего строго стабилизированное по амплитуде напряжение. В каналах, сообщающих полости повышенного и пониженного давления размещены измерительный 22 и компенсационный 23 струйно-конвективные модули. Причем измерительный 22 струйно-конвективный модуль находится в проточном канале, а компенсационный 23 в глухой камере. Анемочувствительных элементов струйно-конвективных модулей 22 и 23 включены в свои электроизмерительные схемы 36 и 37, расположенные в электронном модуле 28 барометрического канала, являющегося частью блока 7 формирования первичных информативных сигналов. На выходе электроизмерительных схем 36 и 37 формируются соответственно напряжения U=f(ρVмн, T) и U=f(T), которые подаются на вычитатель 38. Его выходной сигнал через фильтр 39 нижних частот подается на делитель 40, на второй вход которого подключен выход электроизмерительной схемы 37.
Таким образом, на выходе электронного модуля 28 барометрического канала формируется сигнал по изменению плотности ρ с высотой Н, который несет информацию как о давлении рН, так и о температуре ТН. Использование этого сигнала позволяет провести комплексную коррекцию информативного сигнала, а также получить резервный сигнал по высоте, который можно использовать для управления в случае отказа основного канала.
Периодичность автокоррекции при полете ЛА с постоянной высотой, когда вариации дестабилизирующих факторов незначительны, составляет 60-90 с и задается таймером 66, формирующим управляющие сигналы для срабатывания генератора 65 управляющих сигналов. При этом в режиме автокоррекции все средства индикации системы переводятся в режим памяти предыдущего значения измеряемых параметров.
При изменении высоты полета происходит существенное изменение параметров дестабилизирующих факторов, таких как давление и температура. При этом предельно допустимое значение погрешности  (определяется экспериментально из условия соответствия заданному значению аддитивной погрешности на уровне земли по аэрометрическому каналу - 10 км/ч; по каналу барометрической высоты - 10 м, а по каналу вертикальной скорости - 0,5 м/с. Указанные значения этих погрешностей задаются порогом срабатывания соответственно компараторов 53 и 57. Учет влияния характера изменения дестабилизирующего фактора, а также оценка эффективности устранения вызванных ими аддитивной погрешности осуществляется с помощью сравнивающего устройства на основе компаратора 64, работающего в соответствии с неравенством:
(определяется экспериментально из условия соответствия заданному значению аддитивной погрешности на уровне земли по аэрометрическому каналу - 10 км/ч; по каналу барометрической высоты - 10 м, а по каналу вертикальной скорости - 0,5 м/с. Указанные значения этих погрешностей задаются порогом срабатывания соответственно компараторов 53 и 57. Учет влияния характера изменения дестабилизирующего фактора, а также оценка эффективности устранения вызванных ими аддитивной погрешности осуществляется с помощью сравнивающего устройства на основе компаратора 64, работающего в соответствии с неравенством:
где Uρ - напряжение по плотности, и скорости ее изменения  , определяемых соответственно барометрической высотой и скоростью ее изменения; К - коэффициент, определяющий долю сигнала по скорости изменения плотности (высоты) в суммарном сигнале управления периодичностью автокоррекции; KΣ, m и
, определяемых соответственно барометрической высотой и скоростью ее изменения; К - коэффициент, определяющий долю сигнала по скорости изменения плотности (высоты) в суммарном сигнале управления периодичностью автокоррекции; KΣ, m и  - соответственно коэффициент передачи блока управления периодичностью автокоррекции, учитывающий разброс конструктивных параметров измерительных каналов, коэффициент, зависящий от отклонения разброса конструктивных параметров измерительных каналов от номинальных значений, и предельно допустимое значение аддитивных погрешностей измерительных каналов. Граничные значения выражения (4) задаются с помощью компаратора 64.
- соответственно коэффициент передачи блока управления периодичностью автокоррекции, учитывающий разброс конструктивных параметров измерительных каналов, коэффициент, зависящий от отклонения разброса конструктивных параметров измерительных каналов от номинальных значений, и предельно допустимое значение аддитивных погрешностей измерительных каналов. Граничные значения выражения (4) задаются с помощью компаратора 64.
При нарушении неравенства (4) система измерения высотно-скоростных параметров переходит в режим автокоррекции. Для реализации этого режима используется выходной сигнал электронного модуля 28 барометрического канала, который подается на вход модуля управления периодичностью автокоррекции 50 блока автокоррекции 13, где с помощью дифференциатора 61 и масштабирующего звена 62 после суммирования в сумматоре 63 формируется сигнал, определяющий левую часть неравенства (4). Этот сигнал поступает на компаратор 64, пороги срабатывания которого определяются правой частью неравенства (4).
Режим автокоррекции осуществляется в два этапа, смещенных относительно друг друга на время 150-200 мс. Первый этап состоит в формировании тестовых воздействий по аэрометрическому и барометрическому каналам. Реализация этого этапа начинается с подачи первого импульса, поступающего с генератора 65 управляющих сигналов, который подается на коммутатор 16. После его срабатывания на электропневмоклапан 17 подается электропитание. Одновременно этот сигнал подается на коммутатор 14, который отключает микронагнетатель 21 от генератора 15 привода нагнетателя. В результате срабатывания электропневмоклапана 16 каналы полного и дросселированного давления шунтируются между собой, создавая сигнал нулевого давления на первом и втором пневматических входах пневмомодуля 6 аэрометрического канала. При этом перетекание воздуха по струйным модулям 19 и 20 прекращается и на выходе электроизмерительных схем 29 и 30 электронного модуля 27 аэрометрического канала формируется сигнал, пропорциональный аддитивной температурной погрешности по каналу полного и дросселированного давления. Эти сигналы, как и в режиме измерения, поступают на дифференциальные усилители 31 и 32 и после суммирования в блоке 33 и фильтрации в блоке 34 на выходе электронного модуля 27 аэрометрического канала формируется сигнал в виде напряжения, пропорционального остаточной температурной погрешности, который подается на первый вход модуля 48 автокоррекции аэрометрического канала блока автокоррекции 13. Этот сигнал в модуле 48 автокоррекции аэрометрического канала подается на схему коррекции 51, на второй вход которой подается сигнал от преобразователя 55 код-аналог. В результате на первом выходе модуля 48 автокоррекции аэрометрического канала формируется выходной сигнал, который подается на компаратор 53. Выходной сигнал компаратора 53 подается на первый управляющий вход реверсивного счетчика 54, на второй его управляющий вход подается сигнал с выхода блока 50 управления периодичностью автокоррекции, на третий тактовый вход реверсивного счетчика 54 подается напряжение с генератора 52.
Второй этап автокоррекции начинается после затухания переходных процессов, длительность которых не превышает 150-200 мс. При этом работа счетчика 54 начинается после поступления второго импульса с генератора 65 управляющих сигналов на второй вход модуля 48 автокоррекции аэрометрического канала. Сигнал с первого выхода реверсивного счетчика 54 является выходным сигналом системы по сигналу контролю Z режима ее работы и управления индикацией.
Сигнал со второго выхода реверсивного счетчика 54 подается на преобразователь код-аналог 55, выходной сигнал которого в виде аналогового сигнала подается на схему коррекции 51 погрешностей. В результате выходной сигнал блока коррекции 51 уменьшается до уровня, определяемого порогами срабатывания компаратора 53, выходного сигнал которого становится равным логическому нулю и реверсивный счетчик 54 прекращает работу, сохраняя на выходе преобразователя 55 код-аналог напряжение достаточное для коррекции остаточной погрешности аэрометрического канала в режиме измерения.
Одновременно, второй импульс от генератора 65 управляющих сигналов подается также на второй вход модуля автокоррекции 49 барометрического канала блока автокоррекции 13, соединенного с третьим входом реверсивного счетчика 58. Выходной сигнал с реверсивного счетчика 58 подается на преобразователь код-аналог 60, выходной сигнал которого подается на второй вход блока 56 коррекции погрешностей барометрического канала. В результате выходной сигнал блока 56 коррекции уменьшается до уровня, определяемого порогами срабатывания компаратора 57, выходной сигнал которого становится равным нулю, и реверсивный счетчик 57 прекращает работу, сохраняя на выходе преобразователя 60 код-аналог напряжение, достаточное для коррекции остаточной погрешности барометрического канала в режиме измерения.
После завершения второго этапа автокоррекции генератора 65 управляющих сигналов снимает управляющие сигналы с коммутаторов 14 и 16. В результате генератор 15 привода нагнетателя подключается к микронагнетателю 21, а электропневмоклапан разобщает каналы полного и дросселированного давления, и тем самым, восстанавливается работа системы измерения высотно-скоростных параметров в режиме измерения.
Таким образом, введение в систему измерения высотно-скоростных параметров барометрического канала, блока автокоррекции позволяет существенно уменьшить погрешности измерения высотно-скоростных параметров летательного аппарата, обусловленные действием дестабилизирующих факторов (вариаций давления и температуры), а также неидентичностью (разбросом) и нестабильностью характеристик элементов струйно-конвективных модулей, что особенно важно в области малых скоростей полета. Применение модуля управления периодичностью автокоррекции сокращает количество подстроек и позволяет существенно уменьшить динамические погрешности и обеспечить высокую точность работы системы измерения высотно-скоростных параметров летательного аппарата в тяжелых условиях реального полета.
Заявляемое изобретение расширяет функциональные возможности системы за счет одновременного формирования массива информативных сигналов по относительной плотности, истинной воздушной и приборной скорости, барометрической высоте и скорости ее изменения в широком диапазоне их изменения от сверхмалых значений по скорости от 10 до 300 км/ч, по высоте от 30 до 3000 м, по вертикальной скорости от 0,3 до 30 м/с при скосах потоках ±60 град. При этом полученная информация характеризуется высокой точностью, достоверностью и метрологической надежностью, а конструкция системы измерения высотно-скоростных параметров летательных аппаратов достаточно проста в реализации и надежна в работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ | 1987 |
|
SU1568729A1 |
| СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИНАМИКИ АТМОСФЕРЫ В ПРИЗЕМНОМ СЛОЕ | 2013 |
|
RU2548299C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И СКОРОСТИ ЕГО ИЗМЕНЕНИЯ | 2012 |
|
RU2518851C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ГАЗОВОГО ПОТОКА | 2005 |
|
RU2305288C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ГАЗОДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2009 |
|
RU2403545C1 |
| УСТРОЙСТВО КОНТРОЛЯ И ПРОГНОЗИРОВАНИЯ СОСТОЯНИЯ СИСТЕМЫ "МАТЬ-ПЛОД" В ПРОЦЕССЕ РОДОВСПОМОЖЕНИЯ | 2014 |
|
RU2568254C2 |
Изобретение относится к области авиационного приборостроения и может быть использовано для получения информации о высотно-скоростных параметрах полета ЛA. Система измерения высотно-скоростных параметров летательного аппарата содержит приемник воздушных давлений, в проточном канале которого размещены приемные отверстия но полному давлению приемника, генератор и регистрирующие элементы ионно-меточного канала, пневмомодуль аэрометрического канала, блок формирования первичных информативных сигналов и блок обработки выходных сигналов. Дополнительно в приемнике выполнены капиллярный делитель давления, а в проточном канале - приемные отверстия дросселированного давления, сообщенные с первым входом капиллярного делителя давлений, второй вход которого сообщен с приемными отверстиями по полному давлению приемника воздушных давлений, которые посредством пневматических каналов сообщены с пневмомодулем аэрометрического канала. Также введены пневмомодуль барометрического канала, пневматический вход которого сообщен с выходом капиллярного делителя давления, блок автокоррекции и электропневмоклапан. Технический результат заключается в повышении точности и надежности измерений, обеспечении возможности непрерывного контроля режима работы измерительных каналов и адаптации измерительных каналов к изменению условий полета. 10 з.п. ф-лы, 4 ил.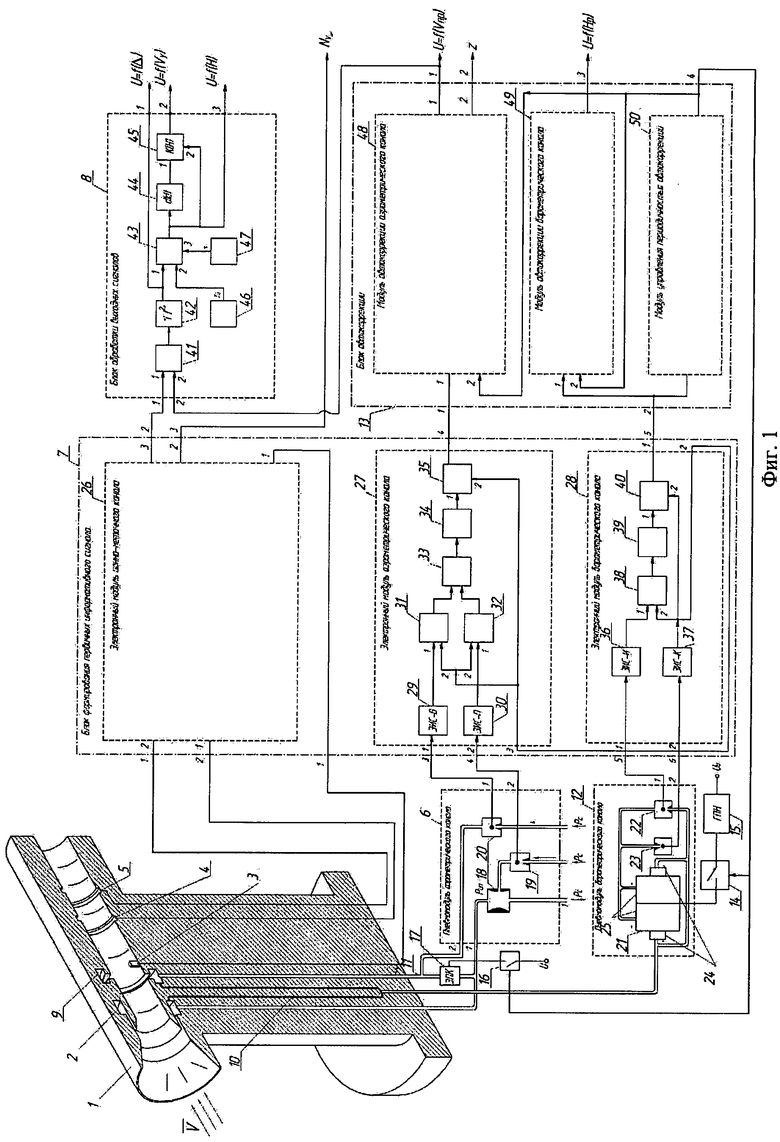
1. Система измерения высотно-скоростных параметров, состоящая из приемника воздушных давлений, в проточном канале которого размещены приемные отверстия по полному давлению приемника, генератор и регистрирующие элементы ионно-меточного канала, пневмомодуля аэрометрического канала, блока формирования первичных информативных сигналов и блока обработки выходных сигналов, отличающаяся тем, что
в приемнике воздушных давлений дополнительно выполнены капиллярный делитель давления, а в проточном канале приемные отверстия дросселированного давления, сообщенные с первым входом капиллярного делителя давлений, второй вход которого сообщен с приемными отверстиями по полному давлению приемника воздушных давлений, которые посредством пневматических каналов сообщены с пневмомодулем аэрометрического канала,
и введены
пневмомодуль барометрического канала, пневматический вход которого сообщен с выходом капиллярного делителя давления,
блок автокоррекции, первый и второй электрические входы которого подключены к четвертому и пятому выходам блока формирования первичных информативных сигналов, первый выход подсоединен к второму входу блока обработки выходных сигналов, причем его четвертый выход подключен к управляющему входу первого ключа, сигнальный выход которого соединен с генератором привода нагнетателя, вход которого соединен с источником электропитания U0, и к управляющему входу второго ключа, вход которого подсоединен к источнику электропитания U0, а его сигнальный выход подсоединен к электропневмоклапану,
электропневмоклапан, один из пневматических входов которого сообщен с приемными отверстиями дросселированного давления, а другой с приемными отверстиями по полному давлению приемника воздушных давлений и с первым входом пневмомодуля аэрометрического канала,
при этом первый и второй входы блока формирования первичных информативных сигналов подключены к первому и второму регистрирующим электродам ионно-меточного канала, а его первый выход к генератору ионно-меточного канала,
третий и четвертый входы блока формирования первичных информативных сигналов подсоединены к первому и второму электрическим выходам пневмомодуля аэрометрического канала, а его пятый и шестой входы подключены к первому и второму выходам пневмомодуля барометрического канала,
причем второй его выход подключен к первому входу блока обработки выходных сигналов,
а выходами системы являются
третий выход блока формирования первичных информативных сигналов по числовому эквиваленту  истинной воздушной скорости,
истинной воздушной скорости,
первый выход блока обработки выходных сигналов по сигналу относительной плотности U=f(Δ), второй его выход по сигналу вертикальной скорости U=f(Vy) и третий его выход по сигналу по барометрической высоте U=f(H),
первый выход блока автокоррекции по сигналу приборной скорости U=f(Vпр), второй его выход по сигналу контроля Z режима работы и управления индикацией системы и третий его выход по резервному сигналу барометрической высоты U=f(Hp).
2. Система по п.1, отличающаяся тем, что пневмомодуль аэрометрического канала содержит струйный инвертор, струйно-конвективный модуль по полному давлению и струйно-конвективный модуль по дросселированному давлению,
при этом первый вход пневмомодуля аэрометрического канала по полному давлению сообщен с входом струйного инвертора, второй вход которого сообщен с выходом струйно-конвективного модуля по полному давлению, а второй вход сообщен с выходом струйно-конвективного модуля по дросселированному давлению,
причем входы струйно-конвективного модуля по дросселированному давлению и струйно-конвективного модуля по полному давлению, а также выход струйного инвертора сообщены с окружающей средой,
а электрические выходы струйно-конвективного модуля по дросселированному давлению и струйно-конвективного модуля по полному давлению являются первым и вторым электрическими выходами пневмомодуля аэрометрического канала.
3. Система по п.1, отличающаяся тем, что пневмомодуль барометрического канала содержит двухтактный микронагнетатель, измерительный и компенсационный струйно-конвективные модули,
при этом полости повышенного давления двухтактного микронагнетателя сообщены с пневматическим входом пневмомодуля барометрического канала и с входом измерительного струйно-конвективного модуля, пневматический выход которого сообщен с входом компенсационного струйно-конвективного модуля и полостями пониженного давления двухтактного микронагнетателя, управляющий вход которого является электрическим входом пневмомодуля барометрического канала,
кроме того, электрический выход измерительного струйно-конвективного модуля является первым электрическим выходом, а электрический выход компенсационного струйно-конвективного модуля является вторым электрическим выходом пневмомодуля барометрического канала.
4. Система по п.1, отличающаяся тем, что блок формирования информативных сигналов содержит
электронный модуль ионно-меточного канала, первый вход которого соединен со вторым, а второй с первым входами блока формирования информативных сигналов, при этом первый выход электронного модуля ионно-меточного канала соединен с первым, второй - с третьим, а третий - с вторым выходами блока формирования информативных сигналов,
электронный модуль аэрометрического канала, первый и второй входы которого соединены с третьим и четвертым входами, а выход - с четвертым выходом блока формирования информативных сигналов, и
электронный модуль барометрического канала, первый и второй входы которого соединены с пятым и шестым входами, первый выход с пятым выходом блока формирования информативных сигналов, а второй выход с третьим входом электронного модуль аэрометрического канала.
5. Система по п.4, отличающаяся тем, что электронный модуль аэрометрического канала содержит первую и вторую электроизмерительную схемы, первый и второй дифференциальные усилители, сумматор, фильтр нижних частот и делитель напряжения,
причем первый вход электронного модуля аэрометрического канала подсоединен к первой электроизмерительной схеме, второй вход ко второй электроизмерительной схеме, третий вход ко вторым входам первого и второго дифференциальных усилителей, на первые входы которых соответственно подсоединены выходы первой и второй электроизмерительных схем, и ко второму входу делителя напряжения,
при этом выходы первого и второго дифференциальных усилителей подключены соответственно к первому и второму входам сумматора, выход которого через фильтр низких частот подсоединен к первому входу делителя напряжения, выход которого является выходом электронного модуля аэрометрического канала.
6. Система по п.4, отличающаяся тем, что электронный модуль барометрического канала содержит электроизмерительную схему, компенсационную электроизмерительную схему, вычитатель, фильтр нижних частот, делитель напряжения,
причем первый вход электронного модуля барометрического канала подсоединен к входу электроизмерительной схемы, выход которой подключен к первому входу вычитателя, второй вход электронного модуля барометрического канала подсоединен к входу компенсационной электроизмерительной схемы, выход которой является вторым выходом электронного модуля барометрического канала по сигналу компенсирующего напряжения и подсоединен на второй вход вычитателя, а также на второй вход делителя, на первый вход которого через фильтр нижних частот подсоединен выход вычитателя,
при этом выход делителя является первым выходом электронного модуля барометрического канала.
7. Система по п.1, отличающаяся тем, что блок обработки выходных сигналов содержит соединенные между собой делитель напряжения, квадрататор, функциональный преобразователь, дифференциатор, масштабирующее звено, задатчик температуры на начальной высоте полета, задатчик градиента температуры по высоте,
причем первый и второй входы блока обработки выходных сигналов соответственно соединены с первым и вторым входами делителя напряжения, выход которого соединен со входом квадрататора, выходной сигнал с которого, являющийся выходом системы по сигналу относительной плотности U=f(Δ), подключен к первому входу функционального преобразователя, на второй вход которого подключен выход с задатчика температуры на начальной высоте полета, а на третий вход - выход с задатчика градиента температуры по высоте, при этом выход функционального преобразователя, являющийся третьим выходом системы по сигналу барометрической высоты U=f(H), подсоединен одновременно на вход дифференциатора и на второй вход масштабирующего звена с управляемым коэффициентом передачи, на первый вход которого подключен выход дифференциатора, при этом выход масштабирующего звена является вторым выходом блока обработки выходных сигналов по сигналу вертикальной скорости U=f(Vy).
8. Система по п.1, отличающаяся тем, что блок автокоррекции содержит модуль автокоррекции аэрометрического канала, первый вход которого соединен с первым входом блока автокоррекции, а первый и второй выходы соединены соответственно с первым и вторым выходами блока автокоррекции,
модуль автокоррекции барометрического канала, первый вход которого соединен со вторым входом, а выход соединен с третьим выходом блока автокоррекции,
модуль управления периодичностью автокоррекции, вход которого соединен со вторым входом блока автокоррекции, а выход, являющийся четвертым выходом блока автокоррекции, подключен ко вторым входам модуля автокоррекции аэрометрического канала и модуля автокоррекции барометрического канала.
9. Система по п.8, отличающаяся тем, что модуль автокоррекции аэрометрического канала содержит схему коррекции, генератор счетных импульсов, компаратор, реверсивный счетчик, преобразователь код-аналог,
причем первый вход модуля автокоррекции аэрометрического канала соединен с первым входом схемы коррекции, на второй вход которой подсоединен выход преобразователя код-аналог, выход схемы коррекции является первым выходом модуля автокоррекции аэрометрического канала по сигналу приборной скорости U=f(Vпр), а также подсоединен к входу компаратора, выход которого соединен с первым входом реверсивного счетчика, второй вход которого подключен к генератору счетных импульсов,
при этом первый выход реверсивного счетчика является первым выходом модуля автокоррекции аэрометрического канала по сигналу контроля режима работы Z и управления индикацией, а второй подсоединен к входу преобразователя код-аналог,
кроме того, второй вход модуля автокоррекции аэрометрического канала подсоединен к третьему входу реверсивного счетчика.
10. Система по п.8, отличающаяся тем, что модуль автокоррекции барометрического канала содержит схему коррекции, компаратор, реверсивный счетчик, генератор счетных импульсов, преобразователь код-аналог,
причем первый вход модуля автокоррекции барометрического канала соединен с первым входом схемы коррекции, на второй вход которой подключен выход преобразователя код-аналог,
при этом выход схемы коррекции одновременно является первым выходом модуля автокоррекции барометрического канала по резервному сигналу барометрической высоты U=f(Hp) и подсоединен к входу компаратора, выход которого совместно с выходом генератора счетных импульсов подключены соответственно к первому и второму входам реверсивного счетчика, выход которого соединен с входом преобразователя код-аналог,
кроме того, третий вход реверсивного счетчика соединен со вторым входом модуля автокоррекции барометрического канала.
11. Система по п.8, отличающаяся тем, что модуль управления периодичностью автокоррекции содержит дифференциатор, масштабирующее звено, сумматор, компаратор, генератор управляющих сигналов, таймер,
при этом вход модуля управления периодичностью автокоррекции одновременно подсоединен к входу дифференциатора и к входу масштабирующего звена, выходы которых соответственно подключены к первому и второму входам сумматора, выход которого соединен с входом компаратора, выход которого совместно с выходом таймера подключены соответственно к первому и второму входам генератора управляющих сигналов, выход которого является выходом модуля управления периодичностью автокоррекции.
| Тюрина М.М., Порунова А.А | |||
| Система измерения высотно-скоростных параметров винтокрылых и сверхлегких летательных аппаратов // Изв | |||
| ВУЗов | |||
| Авиационная техника | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
| Способ без реактивного расщепления жиров | 1951 |
|
SU94346A1 |
| Кравцов В.Г., Алексеев Н.В | |||
| Аэрометрия высотно-скоростных параметров ЛА // Приборы и системы управления, | |||

