Изобретение относится к устройствам для измерения высотно-скоростных параметров вертолета.
Известны способы и устройства для измерения высотно-скоростных параметров самолета, в которых реализуется аэрометрический метод измерения. В таких устройствах с помощью приемника воздушного давления воспринимаются статическое и полное давление набегающего воздушного потока, по которым определяются барометрическая высота, индикаторная (приборная) и истинная воздушная скорость (Браславский Д.А. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970. 392 с.) - [1]. С помощью установленных в набегающем потоке приемников также воспринимают давления, которые характеризуют угловое положение вектора воздушной скорости в связанной системе координат - углы атаки и скольжения (Петунин А.Н. Методы и техника измерения параметров газового потока. М.: Машиностроение, 1972. 392 с.) - [2]. Однако применение таких устройств на вертолете позволяет достаточно точно измерить барометрическую высоту и воздушную скорость только при скоростях полета более 50...70 км/ч, когда приемники давления выходят за пределы вихревой колонны, создаваемой несущим винтом вертолета, и обеспечивается помехоустойчивое восприятие и преобразование воспринимаемых воздушных давлений. Диапазон измерения углов атаки и скольжения указанных устройств также ограничен значениями ±30°, в то время как для вертолета рабочими являются полеты вперед-назад, вправо-влево, а также полеты в области малых и околонулевых скоростей.
Для получения информации о высотно-скоростных параметрах в области малых скоростей полета вертолета в известных системах воздушных сигналов (СВС) вертолета применяют несколько проточных приемников давления, размещаемых симметрично относительно продольной оси вертолета (Козицын В.К., Макаров Н.Н., Порунов А.А., Солдаткин В.М. Анализ принципов построения СВС вертолета. //Авиакосмическое приборостроение, 2003, №10. С.2-13) - [3]. Экспериментальные исследования такой СВС, разработанной МПКБ "Восход" [3], показали, что при скоростях полета менее 30 км/ч погрешность измерения угла скольжения достигает ±2°, а при скоростях более 70 км/ч, когда носовая часть фюзеляжа вертолета (где установлены проточные приемники) выходит из вихревой колонны, погрешность уменьшается до ±0,4°. Однако одним из основных недостатков такой СВС является ограниченный диапазон измерения, составляющий по углу скольжения β=±20°.
В последние годы за рубежом и у нас в стране находят применение СВС вертолета со свободно-ориентируемым приемником давления типа Lassie, ХМ-143 и СВС-В1 - [3], которые позволяют получать информацию о параметрах вектора воздушной скорости вертолета и при скоростях полета менее 50...70 км/ч, когда приемник давления находится в створе вихревой колонны. Однако за счет подвижных механических элементов, поворачивающихся в кардановом подвесе, усложняется конструкция приемника, затрудняется съем первичных пневматических сигналов (давлений), снижается надежность работы и увеличивается стоимость системы.
Указанные недостатки отсутствуют в системе воздушных сигналов вертолета на основе неподвижного многоканального (многофункционального) проточного аэрометрического приемника (преобразователя) и струйно-конвективных (термоанемометрических) измерительных каналов (преобразователей), взятой в качестве прототипа (Порунов А.А., Солдаткин В.В. Структура и алгоритмы системы воздушных сигналов вертолета на основе многофункционального аэрометрического преобразователя. //Сборник материалов Второго Международного симпозиума "Авиакосмические приборные технологии", 17-20 сентября 2002 года. Санкт-Петербург. СПбГУАП. С.33-35) - [4]. В основу построения такой системы воздушных сигналов положена обработка массива первичных информативных сигналов-давлений, воспринимаемых многоканальным проточным аэрометрическим преобразователем (приемником), выполненным, например, согласно патента РФ (патент РФ №2042137, МПК G01Р 5/16. Многоканальный аэрометрический преобразователь. //Порунов А.А., Олин В.Н., Захарова Н.С., 1995) - [5].
Система содержит многоканальный аэрометрический приемник (АМП), полости воспринимаемых давлений которого пневматическими каналами соединены со входом осредняющей камеры и со входом струйно-конвективных преобразователей (СКП). Полость статического давления АМП пневматическим каналом связана со входом датчика статического давления, формирующего электрический сигнал, пропорциональный статическому давлению. На выходе осредняющей камеры формируется опорное давление, которое по пневмоканалам подается на другие входы СКП и на вход компенсационного СКП, на выходе электроизмерительной схемы которого формируется компенсационный (опорный) сигнал. Электроизмерительные схемы СКП формируют электрические сигналы, пропорциональные давлениям. Выходы электроизмерительных схем СКП соединены со входами схем обработки аналоговых сигналов, другие входы которых соединены с выходом электроизмерительной схемы компенсационного СКП. Компенсационный сигнал используется в качестве опорного для реализации дифференциального способа обработки аналоговых сигналов, что позволяет уменьшить аддитивную составляющую погрешности из-за изменения параметров окружающей среды. Выходы схем обработки аналоговых сигналов подключены к мультиплексору, соединенного с аналого-цифровым преобразователем (АЦП), подключенным к микропроцессору.
При работе системы воспринимаемые АМП давления с помощью СКП и электроизмерительных схем преобразуются в электрические сигналы, пропорциональные давлениям, которые через схемы обработки аналоговых сигналов, мультиплексор и АЦП поступают в микропроцессор. Микропроцессор, обрабатывая поступившие сигналы в соответствии с разработанными алгоритмами, формирует выходные сигналы по величине воздушной скорости Vв, углу атаки α и углу скольжения β. Обрабатывая сигнал с выхода датчика статического давления, на выходе микропроцессора формируется выходной сигнал по барометрической высоте полета Н и вертикальной скорости Vу=dH/dt.
Применение многоканального проточного аэрометрического приемника позволяет расширить диапазон измерения по углу скольжения до ±180°, обеспечить помехоустойчивое измерение угла атаки, воздушной скорости, барометрической высоты и вертикальной скорости вертолета, в том числе при малых скоростях полета. При этом использование струйно-конвективных измерительных каналов преобразования аэрометрических сигналов (давлений) в электрический сигнал, благодаря их высокой чувствительности в диапазоне малых перепадов давлений, позволяет расширить нижнюю границу рабочих скоростей полета до 3...5 км/ч.
Недостатком такой системы воздушных сигналов является усложнение конструктивной схемы и аппаратной реализации системы, вызванное большим количеством пневмоэлектрических, например термоанемометрических измерительных каналов преобразования массива первичных пневматических сигналов-давлений в электрические сигналы, по которым проводится определение угла скольжения вертолета. Следует отметить, что к используемым пневмоэлектрическим предъявляются жесткие требования к идентичности и стабильности их статических характеристик, что практически трудно осуществить для большого числа преобразователей, например шести или восьми, в условиях реальной эксплуатации. Это приводит к снижению технологичности и повышению стоимости системы или ее дополнительному усложнению за счет реализации структурных методов повышения точности, например использование цепей адаптивной автоподстройки пневмоэлектрических каналов. Так как число пневмоэлектрических преобразователей определяется количеством трубок полного давления, равным шести или восьми, то это усложняет и аппаратную реализацию системы.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в упрощении конструктивной схемы, повышении технологичности и снижении стоимости системы за счет уменьшения числа пневмоэлектрических преобразователей в канале измерения угла скольжения.
Технический результат достигается тем, что в системе воздушных сигналов вертолета, содержащей проточный многоканальный аэрометрический приемник, полости дросселированного статического давления и 2n-трубок полного давления которого, подключены ко входам пневмоэлектрических преобразователей, где n=2, 3 ..., электроизмерительные схемы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по высотно-скоростным параметрам полета вертолета, новым является то, что в ней использованы n-дифференциальных пневмоэлектрических преобразователей, пневматические входы каждого из которых подключены к трубкам полного давления, расположенным на одной оси в противоположных направлениях. В качестве пневмоэлектрических преобразователей использованы дифференциальные термоанемометрические преобразователи расхода газа.
Сущность изобретения поясняется на фиг.1 - 3, где
фиг.1 - структурно-функциональная схема системы воздушных сигналов вертолета;
фиг.2 и 3 - угловые характеристики трубок полного давления.
Здесь 1 - многоканальный аэрометрический приемник; 2 - шесть соосно расположенных трубок полного давления с шагом 60°; 3 - пневмоэлектрические, например термоанемометрические преобразователи полного и дросселированного давлений; 4 - пневмоэлектрический преобразователь статического давления; 5 - электроизмерительные схемы, 6 - мультиплексор, 7 - аналого-цифровой преобразователь, 8 - микропроцессор-вычислитель.
Неподвижный проточный многоканальный аэрометрический приемник (АМП) 1 устанавливают на фюзеляже или над втулкой несущего винта вертолета и ориентируют по осям связанной (скоростной) системы координат, в которой положение вектора воздушной скорости вертолета  определяется углами атаки α и скольжения β. Полости трубок полного давления 2, расположенных попарно на одной оси в противоположных направлениях, подключены ко входам пневмоэлектрических преобразователей 3, выходные сигналы электроизмерительных схем 5 которых соответствуют величинам давлений pi, воспринимаемых соответствующими трубками полного давления с учетом знака давления, определяемым угловым положением вектора воздушной скорости. Выходы электроизмерительных схем 5 подключены к мультиплексору 6 и, далее на аналого-цифровой преобразователь 7. Выходной код аналого-цифрового преобразователя 7, содержащий информацию о величинах давлений pi, регистрируемых поочередно, поступает на микропроцессорный вычислитель 8. Сигнал с каналов статического давления и каналов измерения угла атаки α через свой пневмоэлектрический преобразователь 4 и электроизмерительную схему 5 также подается через мультиплексор и аналого-цифровой преобразователь на микропроцессорный вычислитель.
определяется углами атаки α и скольжения β. Полости трубок полного давления 2, расположенных попарно на одной оси в противоположных направлениях, подключены ко входам пневмоэлектрических преобразователей 3, выходные сигналы электроизмерительных схем 5 которых соответствуют величинам давлений pi, воспринимаемых соответствующими трубками полного давления с учетом знака давления, определяемым угловым положением вектора воздушной скорости. Выходы электроизмерительных схем 5 подключены к мультиплексору 6 и, далее на аналого-цифровой преобразователь 7. Выходной код аналого-цифрового преобразователя 7, содержащий информацию о величинах давлений pi, регистрируемых поочередно, поступает на микропроцессорный вычислитель 8. Сигнал с каналов статического давления и каналов измерения угла атаки α через свой пневмоэлектрический преобразователь 4 и электроизмерительную схему 5 также подается через мультиплексор и аналого-цифровой преобразователь на микропроцессорный вычислитель.
При работе системы воздушных сигналов вертолета воспринимаемые трубками полного давления 2 АМП давления рi пневмоэлектрическими преобразователями преобразуются в электрические сигналы Ui, которые подаются в вычислитель для обработки.
Алгоритм обработки массива информативных сигналов определяется спецификой угловых характеристик соосных трубок полного давления, расположенных в противоположных направлениях и подключенных ко входам дифференциальных пневмоэлектрических преобразователей, представленных на фиг.2.
Сигналы на выходе дифференциальных пневмоэлектрических преобразователей имеют области положительного скоростного напора, соответствующие встречному взаимному расположению трубки полного давления, подключенной к положительному входу дифференциального пневмоэлектрического преобразователя, и вектора скорости воздушного потока, и области отрицательного напора, соответствующие ориентации трубки приемника по направлению вектора скорости воздушного потока. Введем следующие обозначения для полученных информативных сигналов U1, U2, U3.
При инвертированном расположении трубок для электрических сигналов дифференциальных пневмоэлектрических преобразователей справедлива иллюстрация, приведенная на фиг.3. При этом для полученных информативных сигналов U4, U5, U6 справедливы следующие соотношения:
U4=-U1, U5=-U2, U6=-U3.
Работа разработанного алгоритма обработки массива сигналов U1...U6 начинается с определения максимального из сигналов

при этом вначале производится поиск максимального из сигналов первых трех датчиков, после чего сигналы датчиков инвертируются и процесс поиска максимума продолжается.
Номер k канала с максимальным уровнем сигнала определяет первое приближение углового положения вектора воздушной скорости β0.
Например, в соответствии с результатами, представленными на фиг.2 и 3, расчеты первого приближения сведены в таблицу 1.
Юстировка начального углового положения осуществляется при установке аэрометрического приемника на объекте.
Вторым этапом обработки массива сигналов является определение знака отклонения углового положения вектора воздушной скорости от направления приемника с максимальным сигналом. Для этого производится сравнение по величине информативных сигналов соседних с каналом максимального сигнала аэрометрического приемника и в зависимости от этого определяется знак приращения углового положения ±k*Δβ.
Результаты определения знака отклонения Δβ сведены в таблицу 2.
(-U3<U2)
(-U2<U1)
Уточнение величины приращения Δβ производится исходя из решения уравнения вида


где f(Δβ), f(60-Δβ) - нормированные угловые характеристики трубок полного давления многоканального проточного аэрометрического приемника в диапазоне углов 0...30 и 30...60°, рассчитанные аналогично выбранному прототипу. Тогда угол скольжения вертолета β=β0+k*Δβ.
Восстановление истинной величины сигнала, соответствующего вектору воздушной скорости, действующему под углом Δβ к приемнику, производится в соответствии с выражением
Угол атаки α, барометрическая высота Н и вертикальная скорость Vу вертолета определяются аналогично прототипу.
Таким образом, применение дифференциальных пневмоэлектрических преобразователей для преобразования массива давлений, воспринимаемых трубками полного давления многоканального проточного аэрометрического приемника в электрический сигнал, позволяет существенно упростить конструктивное и аппаратное исполнение системы воздушных сигналов вертолета, вдвое уменьшив количество пневмоэлектрических преобразователей при сохранении ее метрологических характеристик и повышении ее надежности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОЗДУШНОГО ПОТОКА | 2009 |
|
RU2426133C1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |


Изобретение относится к устройствам для измерения высотно-скоростных параметров вертолета. Система содержит проточный многоканальный аэрометрический приемник, полости дросселированного статического давления и 2n-трубок полного давления которого подключены ко входам n дифференциальных пневмоэлектрических преобразователей, где n=2, 3 ..., электроизмерительные схемы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по высотно-скоростным параметрам полета вертолета. В качестве пневмоэлектрических преобразователей, использование которых позволяет существенно упростить конструктивное и аппаратное исполнение системы, могут быть использованы дифференциальные термоанемометрические преобразователи расхода газа. 1 з.п. ф-лы, 3 ил., 2 табл.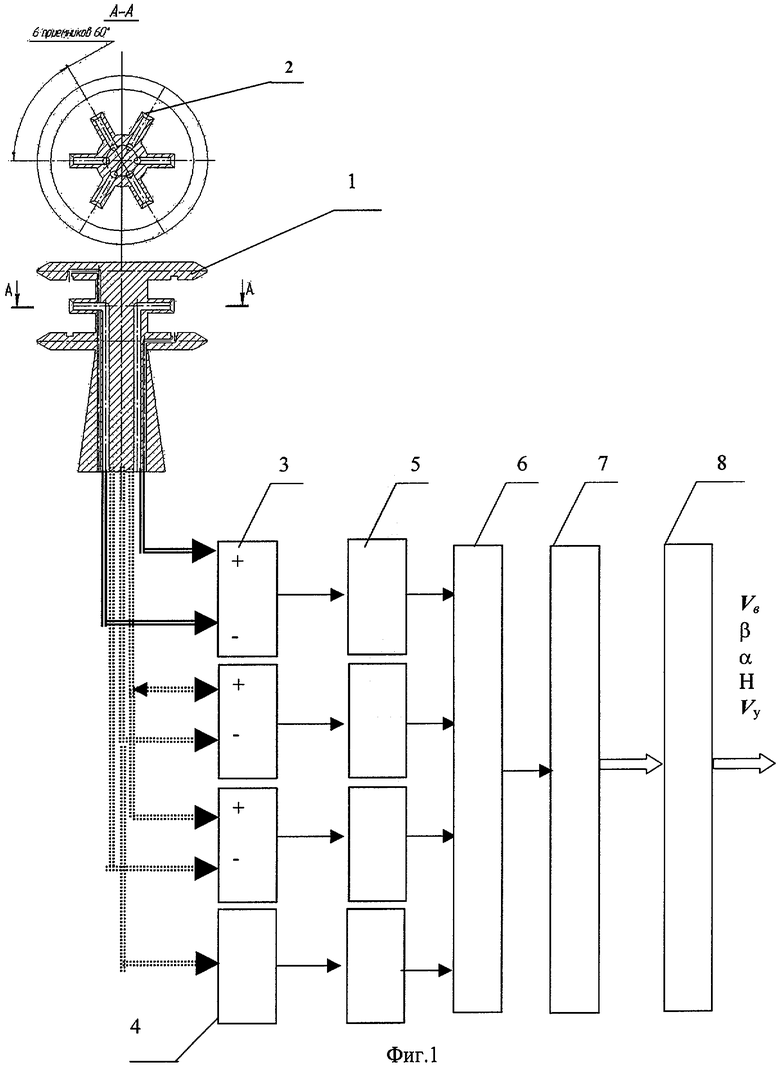
| МНОГОКАНАЛЬНЫЙ АЭРОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1993 |
|
RU2042137C1 |
| Клещевидный висячий замок | 1934 |
|
SU41875A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2192015C1 |
| US 6038932 A, 21.03.2000 | |||
| US 5648604 A, 15.07.1997. | |||

