Настоящее изобретение относится к гибридным транспортным средствам, которые оборудованы трансмиссией с двойным (или спаренным) сцеплением (DCT) и в которых мощность вырабатывается как двигателем (мотором), так и электромотором.
Ранее предложенное гибридное транспортное средство оборудовано трансмиссией с двойным сцеплением, объединенной с электромотором, и имеет конструкцию, предусматривающую размещение электромотора на нижней части трансмиссии с двойным сцеплением. Благодаря этой конструкции уменьшаются потери при управлении сцеплением, поскольку посредством электромотора имеется возможность приводить в движение транспортное средство и рекуперировать энергию даже при отключении двойного сцепления.
Например, как описано в документе JP 2002-089594, трансмиссия с двойным сцеплением имеет два входных вала и один выходной вал и некоторое количество блоков шестерен между входным валом и выходным валом, при этом блоки шестерен содержат свободную шестерню, без способности вращения соединяемую с одним из валов, и неподвижную шестерню, без способности вращения размещенную на валу, которая сцепляется со свободной шестерней.
Кроме того, в документе JP 2005-329813 описано гибридное транспортное средство, оборудованное трансмиссией с двойным сцеплением.
Описанные выше устройства согласно известному уровню техники имеют ряд недостатков.
Для приведения в действие двигателя транспортного средства, находящегося в приостановленном состоянии, поскольку мощность двигателя и электромотора передается при включении одного из сцеплений двойного сцепления, необходим исполнительный механизм двойного сцепления, который может функционировать в приостановленном состоянии (например, электрический масляный насос), что повышает стоимость и увеличивает вес транспортного средства.
Кроме того, поскольку электромотор расположен спереди, сзади или сбоку трансмиссии, общая длина или общая ширина трансмиссии увеличивается, в результате чего увеличиваются размеры и вес моторного отделения и, соответственно, транспортного средства, что приводит к увеличению издержек производства и повышению расхода топлива.
Когда электромотор размещен с тыльной стороны трансмиссии, не представляется возможным в достаточной степени обеспечить угол поворота ведущего вала в связи с большим наружным диаметром электромотора. В этом отношении уменьшение наружного диаметра электромотора приводит к необходимости увеличения общей длины трансмиссии, что затрудняет размещение трансмиссии в пределах моторного отделения. Таким образом, достаточно трудно разместить указанную трансмиссию в транспортном средстве типа FF с поперечным расположением двигателя, учитывая имеющееся пространство моторного отделении.
Если двойное сцепление вмонтировать в электромотор, то увеличится диаметр ротора и общая длина трансмиссии увеличится, что исключит возможность размещения в моторном отделении, вследствие чего возникает необходимость в увеличении общей ширины кузова транспортного средства.
Кроме того, поскольку при приведении в действие двигателя электромотором должно быть включено сцепление, то для активации сцепления перед запуском двигателя необходимо дополнительно предусмотреть исполнительный механизм (например, электрический масляный насос), обеспечивающий работу сцепления, что повышает стоимость и увеличивает вес транспортного средства.
Задача настоящего изобретения состоит в том, чтобы для решения вышеупомянутых проблем предложить гибридное транспортное средство, содержащее трансмиссию, которая не приводит к увеличению общей длины или общей ширины транспортного средства, даже при размещении электромотора с нижней стороны сцепления трансмиссии с двойным сцеплением, к тому же для активации двойного сцепления из состояния приостановки не требуются какие-либо дополнительные средства.
В настоящем изобретении предлагается гибридное транспортное средство, содержащее в качестве источника мощности двигатель и электромотор для приведения в действие приводного блока посредством трансмиссии, при этом трансмиссия содержит ведущий вал коробки передач, который передает мощность от двигателя, и выходной вал коробки передач, который выводит мощность для приведения в действие ведомого блока, блок двойного сцепления, имеющий первое сцепление и второе сцепление, коаксиально размещенные на ведущем валу коробки передач, причем первый входной вал предназначен для соединения с ведущим валом коробки передач через первое сцепление, и второй входной вал предназначен для соединения с ведущим валом коробки передач через второе сцепление, и содержит блоки шестерен, сформированные с возможностью переключения для соединения как первого входного вала, так и второго входного вала с выходным валом коробки передач, и соединяющее устройство, которое может избирательно переключаться между первым рабочим положением, позволяющим передавать мощность от выходного вала электромотора к ведущему валу коробки передач, и вторым рабочим положением, позволяющим прервать передачу мощности, причем первый входной вал и второй входной вал размещены коаксиально между двигателем и блоком двойного сцепления и приводятся в движение электромотором через соединительное устройство и блок двойного сцепления.
Согласно настоящему изобретению при расположении указанных двух сцеплений в отдалении от двигателя и размещении между ними трансмиссии имеется возможность обеспечить пространство для электромотора и в то же самое время сократить общую ширину трансмиссии.
Кроме того, указанное расположение электромотора, имеющего выходной вал, соединение которого с ведущим валом коробки передач, соединенным с двумя сцеплениями блока двойного сцепления, может прерываться посредством соединительного устройства, позволяет соединять электромотор с двигателем независимо от состояния соединения трансмиссии и использовать электромотор в качестве стартера при запуске двигателя.
Кроме того, поскольку электромотор может быть соединен с двигателем отдельно от двойного сцепления, имеется возможность приводить в действие двигатель без включения двойного сцепления. Поэтому нет необходимости в дополнительном устройстве для включения двойного сцепления из приостановленного состояния в отличие от устройств согласно известному уровню техники, что является преимуществом с точки зрения стоимости и веса транспортного средства.
В одном из вариантов выполнения настоящего изобретения электромотор размещен между двигателем и трансмиссией и соединительное устройство расположено в электромоторе. При этом нет необходимости увеличивать размер моторного отделения для размещения электромотора, благодаря чему он может быть установлен в транспортных средствах различного типа.
Трансмиссия соединяет электромотор с ведущим валом коробки передач посредством соединительного устройства при холодном запуске или при напряжении аккумулятора, не превышающем заданную величину, обеспечивая, таким образом, приведение в действие двигателя электромотором.
Согласно указанному аспекту изобретения имеется возможность соединить электромотор с двигателем независимо от передачи, а также использовать электромотор как стартер для активации двигателя.
Второе соединительное устройство выполнено с возможностью избирательного переключения между первым рабочим положением, позволяющим передавать мощность от выходного вала электромотора на первый входной вал или второй входной вал, и вторым рабочим положением, позволяющим прервать передачу мощности.
Согласно указанному аспекту изобретения, поскольку выходной вал электромотора соединен с входным валом двойного сцепления посредством второго соединительного устройства, движение транспортного средства в режиме электромобиля обеспечивается электромотором без соединения с двигателем.
Первое соединительное устройство или второе соединительное устройство устанавливается в первое рабочее положение согласно состоянию транспортного средства во время приостановки транспортного средства или непосредственно перед приостановкой.
Согласно указанному аспекту изобретения второе соединительное устройство устанавливается в первое рабочее положение, когда возможно инициирование движения в режиме электромобиля посредством электромотора при соответствующем состоянии блока питания электромотора и двигателя.
Кроме того, при возможности инициирования движения транспортного средства в режиме электромобиля после приостановки движения транспортного средства, трансмиссия в процессе приостановки предварительно устанавливает нечетную передачу или четную передачу переключением блока шестерен, и после завершения приостановки транспортного средства передвижение транспортного средства в режиме электромобиля инициируется движущей силой электромотора, и, когда скорость транспортного средства достигает заданной величины или превышает ее, крутящий момент электромотора возрастает, и при включении сцепления со стороны блока шестерен, которые не приведены в движение, двигатель активируется электромотором.
Согласно указанному аспекту изобретения при инициировании движения транспортного средства в режиме электромобиля, поскольку мощность передается от электромотора через второе соединительное устройство непосредственно на первый входной вал или второй входной вал, мощность передается на выходной вал через блоки шестерен. Это позволяет незамедлительно производить инициирование движения транспортного средства.
Затем, когда скорость транспортного средства достигает заданной величины или превышает ее и определена необходимость в движущей силе двигателя, выбирается такое передаточное отношение блока шестерен на стороне, не приводимой в действие электромотором, которое будет превышать передаточное отношение другого блока шестерен, и далее включается сцепление.
Согласно указанному аспекту изобретения, что касается электромотора, то, поскольку двигатель приводится в действие при снижении скорости транспортного средства, имеется возможность уменьшить крутящий момент электромотора для активации двигателя. Таким образом, во время движения транспортного средства в режиме электромобиля посредством электромотора имеется возможность привести в действие двигатель при относительно небольшом крутящем моменте электромотора, благодаря чему диапазон использования крутящего момента электромотора, при котором транспортное средство может двигаться в режиме электромобиля, увеличивается и расход топлива оптимизируется.
Кроме того, при увеличении скорости вращения двигателя до заданной скорости вращения, необходимой для активации двигателя, двигатель приводится в действие и транспортное средство движется при поддержании фиксированного передаточного отношения, и когда скорость транспортного средства снижается и становится меньше заданной величины, двигатель приводится в действие после выравнивания скорости его вращения со скоростью вращения электромотора, и изменение скорости движущегося транспортного средства осуществляется переключением блоков шестерен на произвольно выбранную передачу.
В одном из предпочтительных вариантов выполнения настоящего изобретения при выборе передачи заднего хода во время приостановки движения транспортного средства трансмиссия предварительно устанавливает передачу заднего хода переключением блоков шестерен, и при инициировании движения первое соединительное устройство устанавливается в первое рабочее положение, затем двигатель приводится в действие электромотором и движение транспортного средства назад будет обеспечиваться двигателем. Это позволяет незамедлительно обеспечить инициирование заднего хода транспортного средства.
При выборе движения транспортного средства в режиме электромобиля посредством электромотора трансмиссия устанавливает заданную передачу переключением блоков шестерен и второе соединительное устройство устанавливается в первое рабочее положение, чтобы транспортное средство в режиме электромобиля могло двигаться посредством электромотора на выбранной передаче.
При замедлении движения транспортного средства двигатель находится в режиме остановки, переключением блоков шестерен трансмиссии устанавливается заданная передача, и посредством электромотора производится рекуперация электроэнергии.
Согласно указанному аспекту изобретения расход топлива оптимизируется, поскольку во время остановки двигателя рекуперация энергии полностью обеспечивается электромотором.
Настоящее изобретение поясняется чертежами, на которых представлено следующее:
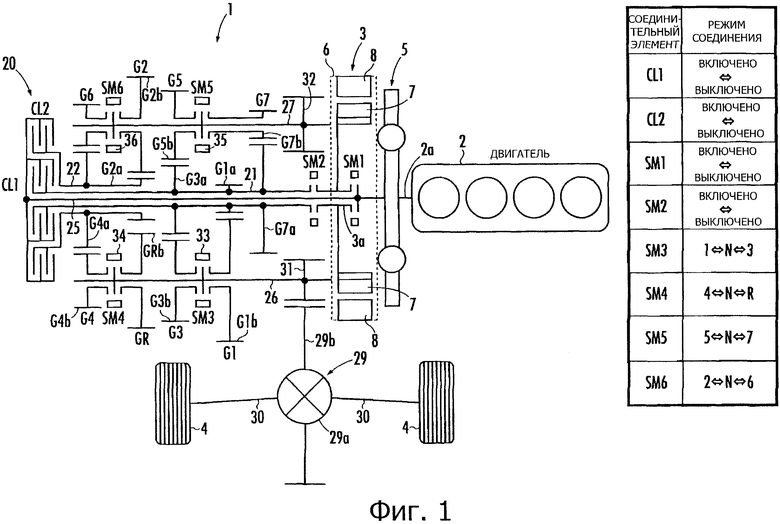
фиг.1 - общая схема силового агрегата гибридного транспортного средства согласно первому варианту выполнения настоящего изобретения;
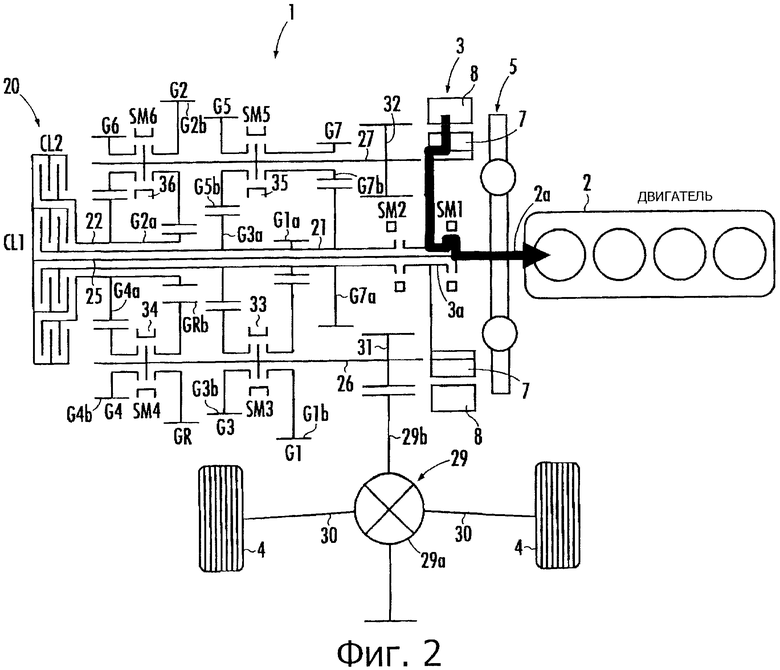
фиг.2 - общая схема силового агрегата гибридного транспортного средства согласно первому варианту выполнения настоящего изобретения, на которой показано соединение для приведения в действие двигателя;
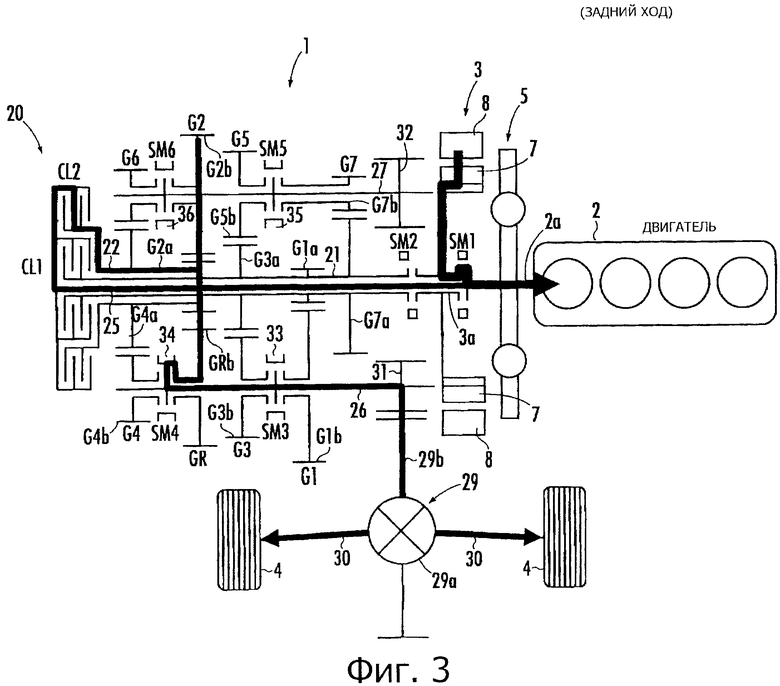
фиг.3 - общая схема силового агрегата гибридного транспортного средства согласно первому варианту выполнения настоящего изобретения, на которой показано соединение при инициировании обратного хода транспортного средства;
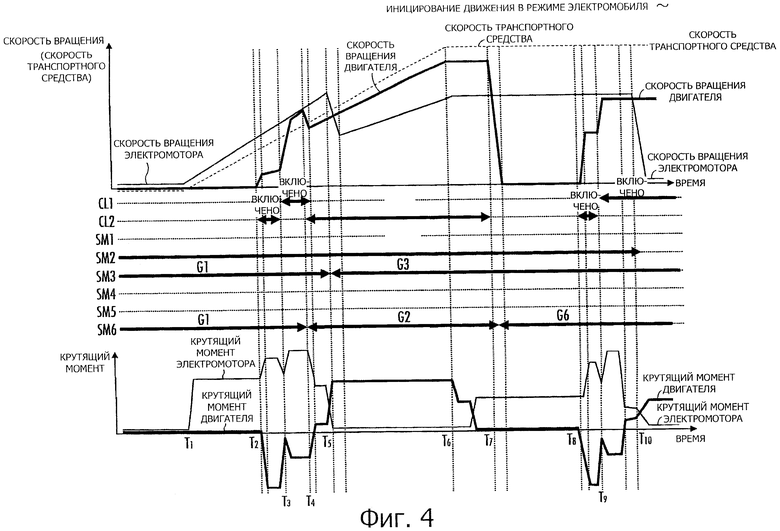
фиг.4 - пояснительная схема, на которой показана работа силового агрегата гибридного транспортного средства согласно первому варианту выполнения изобретения при инициировании движения/движении транспортного средства в режиме электромобиля;
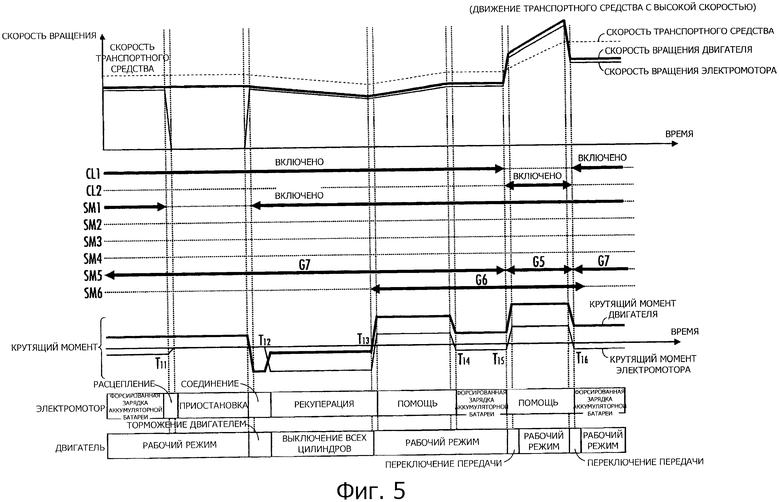
фиг.5 - пояснительная схема, на которой показана работа силового агрегата гибридного транспортного средства согласно первому варианту выполнения изобретения при движении транспортного средства с высокой скоростью;
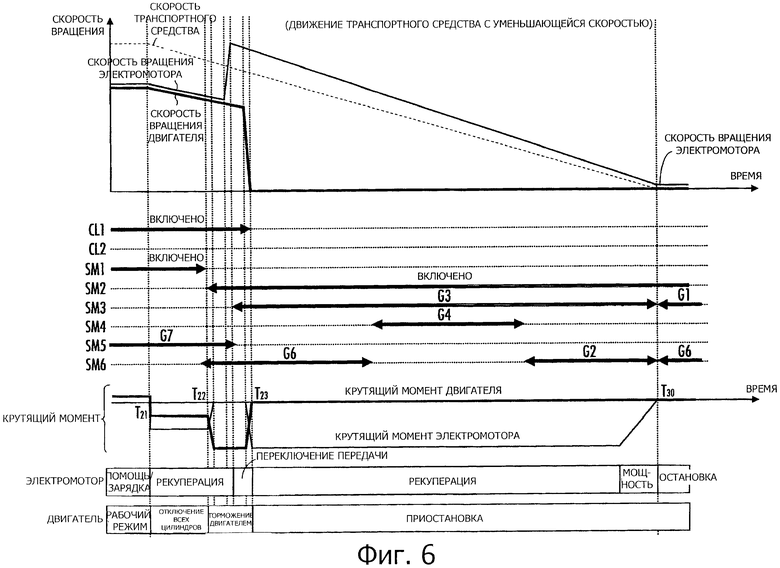
фиг.6 - пояснительная схема, на которой показана работа силового агрегата гибридного транспортного средства согласно первому варианту выполнения изобретения при движении транспортного средства с замедлением;
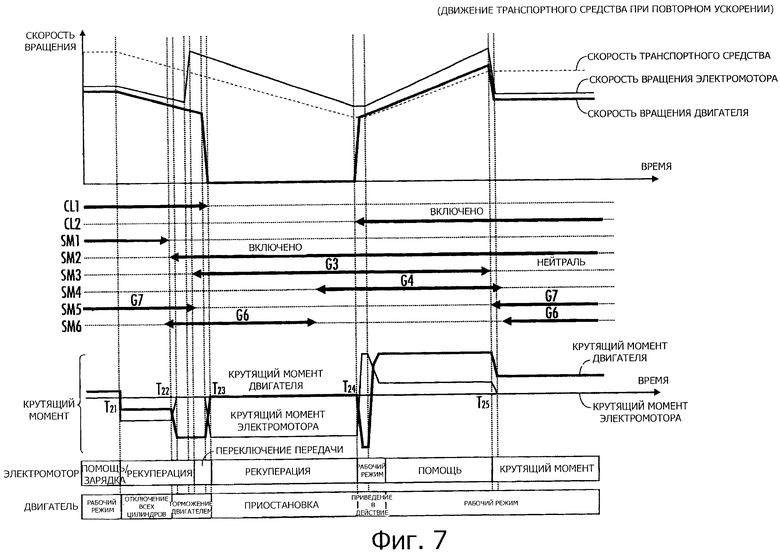
фиг.7 - пояснительная схема, на которой показана работа силового агрегата гибридного транспортного средства согласно первому варианту выполнения изобретения при повторном ускорении транспортного средства после движения с пониженной скоростью;
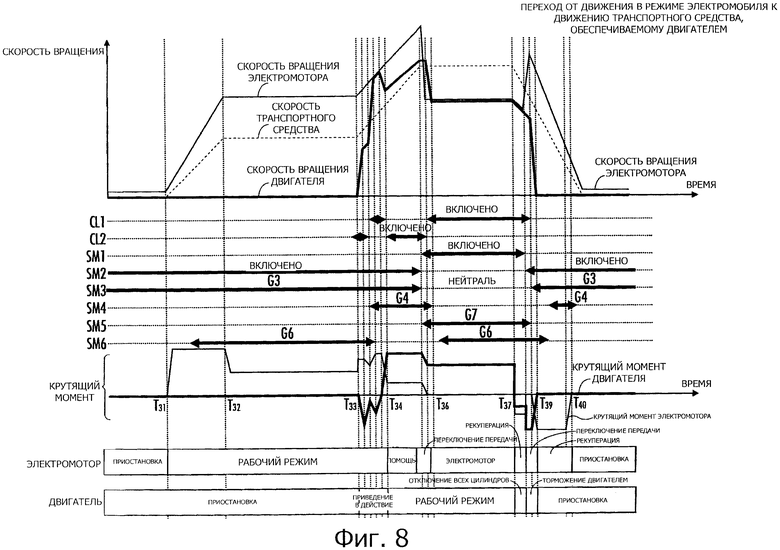
фиг.8 - пояснительная схема, на которой показана работа силового агрегата гибридного транспортного средства согласно первому варианту выполнения изобретения при переключении транспортного средства из режима электромобиля в режим двигателя внутреннего сгорания;
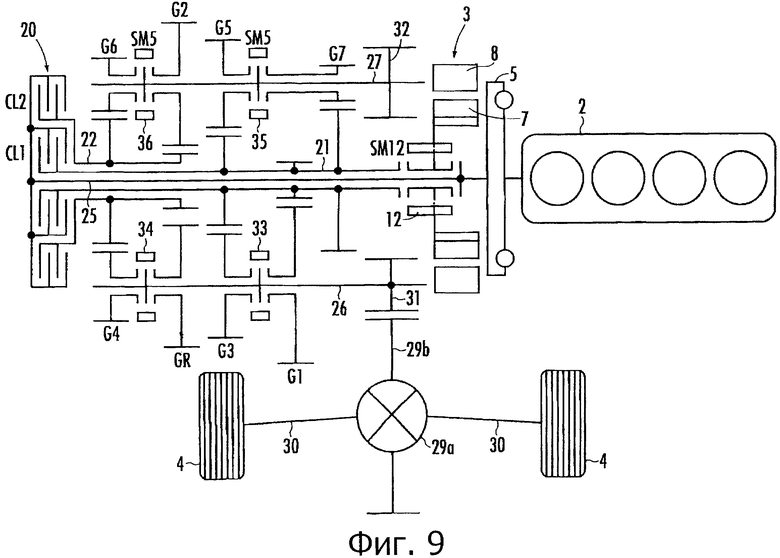
фиг.9 - общая схема силового агрегата гибридного транспортного средства согласно модифицированному варианту выполнения изобретения;
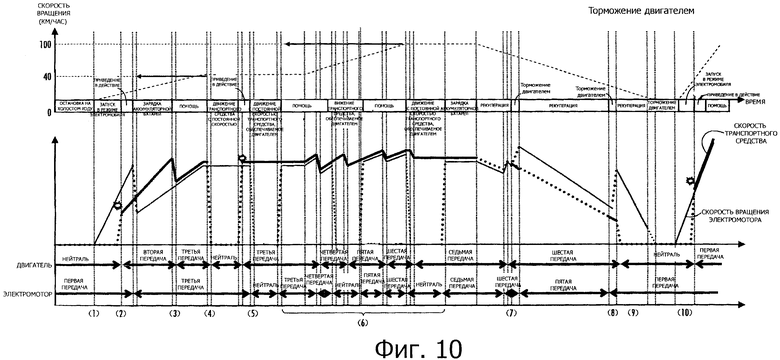
фиг.10 - график, показывающий работу силового агрегата, представленного на фиг.9;
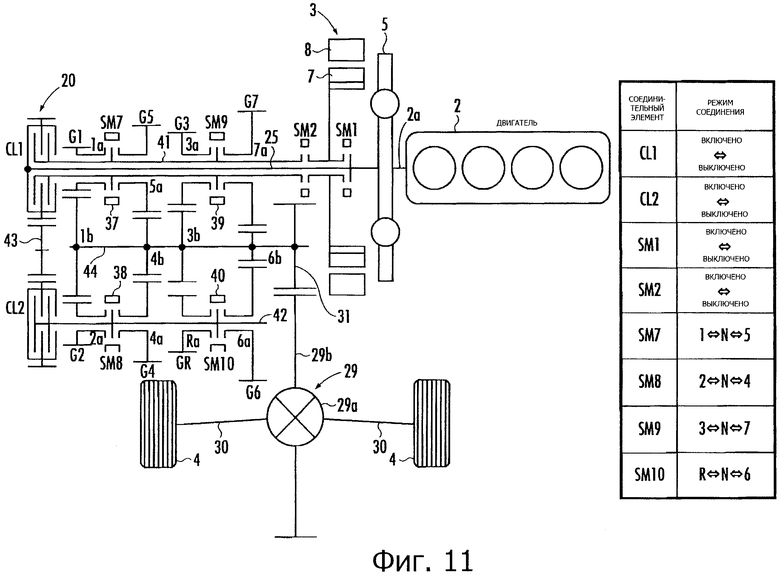
фиг.11 - общая схема силового агрегата гибридного транспортного средства согласно второму предпочтительному варианту выполнения настоящего изобретения.
Первый вариант выполнения изобретения
На фиг.1 показан силовой агрегат гибридного транспортного средства согласно первому варианту выполнения изобретения. Силовой агрегат содержит трансмиссию 1, двигатель 2 и электромотор 3 в качестве мотора и предназначен для передачи мощности двигателя 2 или электромотора 3 посредством трансмиссии 1 на пару ведущих колес 4, 4 транспортного средства и обеспечивает приведение в движение колес 4, 4, составляющих приводной узел.
В настоящем варианте выполнения изобретения двигатель 2 является двигателем внутреннего сгорания, вырабатывающим энергию (крутящий момент) при воспламенении топлива, например бензина, дизельного топлива и спирта или т.п. Двигатель 2 имеет выходной вал (кривошипный вал) 2а для вывода произведенной мощности наружу. Указанный двигатель 2 аналогичен обычному двигателю транспортного средства, выходная мощность которого регулируется степенью открытия дроссельной заслонки, содержащей трубопровод для впуска воздуха, не показанный на чертеже (позволяющей регулировать количество впускаемого воздуха в двигатель 2), при этом выходная мощность передается посредством выходного вала 2а. На выходном валу 2а двигателя установлен маховик 5, а также предусмотрен ведущий вал 25 коробки передач, который вращается вместе с выходным валом 2а.
В настоящем варианте выполнения изобретения электромотор 3 является трехфазным бесщеточным мотором постоянного тока и содержит ротор (вращающуюся часть) 7, поддерживаемый с возможностью вращения в корпусе 6, статор 8, закрепленный на корпусе 6 по периферии ротора 7, и выходной вал 3а для передачи наружу произведенной ротором 7 мощности (крутящего момента). Ротор 7 оснащен множеством постоянных магнитов, а статор 8 оснащен трехфазной катушкой 8а (обмоткой якоря). В данном случае корпус 6 электромотора 3 закреплен на стационарной части, которая является неподвижной относительно кузова транспортного средства, являющегося внешним корпусом моторного устройства или т.п.
Выходной вал 3а электромотора, внутренняя часть которого коаксиальна ротору 7, вращается с ротором 7 как единое целое и конфигурирован с возможностью соединения с ведущим валом 25 коробки передач через первое соединительное устройство (SM1). Кроме того, выходной вал 3а электромотора конфигурирован с возможностью соединения с первым входным валом 21 или вторым входным валом 22 (который будет описан далее) через второе соединительное устройство (SM2).
Первое соединительное устройство (SM1), состоящее из (первого) синхронизатора (синхронизатора коробки передач), размещенного в роторе 7 электромотора 3, имеет внутреннюю часть, коаксиальную выходному валу 2а двигателя 2 и выходному валу 3а электромотора 3. Аналогично второе соединительное устройство (SM2), состоящее из (второго) синхронизатора, размещенного вне электромотора 3, конфигурировано коаксиально выходному валу 2а двигателя 2 и выходному валу 3а электромотора 3.
Катушка 8а электромотора 3 электрически соединена с аккумулятором (аккумуляторной батареей), являющимся источником постоянного тока, через блок электродвигательного привода (PDU), который является управляющей схемой, включающей инверторную схему (не показано). Кроме того, обеспечено электрическое соединение PDU с электронным блоком управления (ECU), который выполняет регулировку движения силового агрегата, включая электромотор 3. Электромотор конфигурирован так, что мощность (крутящий момент), производимая ротором 7 электромотора 3, регулируется электронным блоком управления за счет регулировки тока, поступающего к катушке 8а через PDU. В этом случае регулировка PDU позволяет электромотору 3 работать в режиме генерирования мощности, создающей крутящий момент для движения транспортного средства, при этом энергия к электромотору поступает от аккумуляторной батареи, а также позволяет электромотору работать в режиме рекуперации энергии, при котором создается рекуперативный крутящий момент (рекуперация энергии крутящего момента при торможении транспортного средства) на роторе 7 и посредством механической энергии (вращательной энергии), подаваемой извне через выходной вал 3а электромотора к ротору 7, вырабатывается электроэнергия, которая заряжает аккумуляторную батарею.
Вышеупомянутый электронный блок управления (ECU) является электрическим блоком, содержащим центральный процессор (CPU), оперативную память (RAM), постоянную память (ROM) и схему интерфейса или т.п. и выполняет регулировку работы силового агрегата в соответствии с заданной программой. В этом случае в дополнение к функции регулировки работы электромотора 3 через PDU введена функция регулировки работы двигателя 2 через исполнительный механизм, позволяющая регулировать двигатель посредством исполнительного механизма для дроссельной заслонки или ему подобного (не показано), а также введена функция регулировки работы блока 20 двойного сцепления, который будет описан далее, с помощью схемы управления или исполнительным механизмом (не показано), при этом указанные функции регулировки осуществляются электронным блоком управления (ECU).
Трансмиссия 1 содержит блок 20 двойного сцепления, полый первый входной вал 21, в который вставлен ведущий вал 25 коробки передач, полый второй входной вал 22, установленный на одной и той же оси с первым входным валом 21 и являющийся продолжением первого входного вала 21, блоки G1-G7 и GR шестерен, имеющие различные передаточные отношения (передаточное отношение ведомой шестерни и ведущей шестерни), размещенные последовательно со стороны двигателя 2. Здесь ссылочные позиции (G1-G7, GR) каждого блока шестерен обозначают ступени передаточных отношений шестерен (от первой передачи к седьмой передаче и передачу обратного хода), соответственно.
Ведущий вал 25 коробки передач имеет внутреннюю часть, коаксиальную выходному валу 2а, и соединен с выходным валом 2а двигателя 2 так, что они вращаются как единое целое. В этом случае соединение ведущего вала 25 коробки передач с ротором 7 и выходным валом 3а электромотора 3 может прерываться (соединяться/разъединяться) первым соединительным устройством (SM1).
Блок 20 двойного сцепления содержит первое сцепление (CL1) и второе сцепление (CL2), которые коаксиальны ведущему валу 25 коробки передач и предназначены для передачи вращения ведущего вала 25 коробки передач к первому входному валу 21 через первое сцепление (CL1) и ко второму входному валу 22 через второе сцепление (CL2), соответственно.
Вышеупомянутое первое и второе сцепления CL1 и CL2 являются включающими механизмами, функционирующими для соединения и разъединения ведущего вала 25 коробки передач с первым и со вторым входными валами 21, 22, и регулируются электронным блоком управления (ECU) (указанные сцепления способны избирательно работать в положении соединения и положении разъединения). Таким образом, первое и второе сцепления CL1 и CL2 состоят из фрикционного механизма сцепления, который может быть включен и выключен и передает вращение ведущего вала 25 коробки передач, согласованное с выходным валом 2а двигателя, к первому входному валу 21 и ко второму входному валу 22 соответственно.
Каждый блок G1-G7 шестерен состоит из соответствующих ведущих шестерен G1a-G7a и ведомых шестерен G1b-G7b, каждая из которых сцепляется с соответствующей ведущей шестерней. В данном случае ведущие шестерни G1a, G3a (общие для G3 и G5) и G7a нечетных передач в блоке G1, G3, G5 и G7 шестерен установлены на первом входном валу 21, и ведущие шестерни G2a (общие для G2 и GR) и G4a (общие для G4 и G6) четных передач в блоке G2, G4, G6 и GR шестерен установлены на втором входном валу 22.
Кроме того, трансмиссия 1 имеет два выходных вала 26, 27 и ведомые шестерни G1b, G3b, G4b и GRb, которые сцепляются с ведущими шестернями G1a, G3a, G4a и G2a блоков G1, G3, G4 и GR шестерен, установленными с возможностью вращения на первом выходном валу 26, и ведомые шестерни G2b, G5b, G6b и G7b, которые сцепляются с ведущими шестернями G2a, G3a, G4a и G7a блока G2, G5, G6 и G7 шестерен, установленными с возможностью вращения на втором выходном валу 27.
Кроме того, третий синхронизатор (синхронизатор коробки передач) SM3, который избирательно соединяет ведомую шестерню G1b первого блока G1 шестерен и ведомую шестерню G3b третьего блока G3 шестерен с первым выходным валом 26, и четвертый синхронизатор SM4, который избирательно соединяет ведомую шестерню G4b четвертого блока G4 шестерен и ведомую шестерню GRb блока GR шестерен передачи заднего хода с первым выходным валом 26, установлены на первом выходном валу 26. При этом пятый синхронизатор SM5, который избирательно соединяет ведомую шестерню G5b пятого блока G5 шестерен и ведомую шестерню G7b седьмого блока G7 шестерен со вторым выходным валом 27, и шестой синхронизатор SM6, который избирательно соединяет ведомую шестерню G2b второго блока G2 шестерен и ведомую шестерню G6b шестого блока G6 шестерен со вторым выходным валом 27, установлены на втором выходном валу 27.
Третий и четвертый синхронизаторы SM3, SM4 являются механизмами, тормозящими завихрения на первом выходном валу 26, и содержат синхронизирующие муфты 33, 34, выполненные с возможностью перемещения в осевом направлении под действием исполнительного механизма, который не показан. При перемещении синхронизирующей муфты 33 третьего синхронизатора SM3 из указанного нейтрального положения N к ведомой шестерне G1b или G3b, ведомая шестерня G1b или G3b соединяется с первым выходным валом 26, таким образом, избирательно формируя первый блок G1 шестерен или третий блок G3 шестерен. Аналогично при перемещении синхронизирующей муфты 34 четвертого синхронизатора SM4 из указанного нейтрального положения N к ведомой шестерне GRb или G4b ведомая шестерня GRb или G4b соединяется с первым выходным валом 26, таким образом, избирательно формируя блок GR шестерен передачи заднего хода или четвертый блок G4 шестерен.
Кроме того, пятый и шестой синхронизаторы SM5, SM6 являются механизмами, тормозящими завихрения на втором выходном валу 27, и содержат синхронизирующие муфты 35, 36, способные перемещаться в осевом направлении под действием исполнительного механизма, который не показан. При перемещении синхронизирующей муфты 35 пятого синхронизатора SM5 из указанного нейтрального положения N к ведомой шестерне G5b или G7b ведомая шестерня G5b или G7b соединяется со вторым выходным валом 27, таким образом, избирательно формируя пятый блок G5 шестерен или седьмой блок G7 шестерен. Аналогично при перемещении синхронизирующей муфты 36 шестого синхронизатора SM6 из указанного нейтрального положения N к ведомой шестерне G2b или G6b ведомая шестерня G2b или G6b соединяется со вторым выходным валом 27, таким образом, избирательно формируя второй блок G2 шестерен или шестой блок G6 шестерен.
В данном случае под словосочетанием «формируя блок шестерен» подразумевается обеспечение передачи мощности от входного вала 21, 22 на соответствующие выходные валы 26, 27 посредством блока G1-G7 или GR шестерен.
Вышеупомянутые первый и второй передаточные выходные валы 26, 27 установлены параллельно ведущему валу 25 коробки передач и соединены с ведущими колесами 4, 4 транспортного средства посредством блока 29 дифференциала, расположенного между ведущими колесами 4, 4. Конкретнее, блок 29 дифференциала содержит картер 29а, вмещающий полуосевую шестерню (не показано), соединенную с ведущими колесами 4, 4 через оси 30, 30 соответственно, и шестерню 29b, установленную на внешней периферии картера 29а. Таким образом, выходная шестерня 31 или 32, установленная на одном концевом участке первого передаточного выходного вала 26 или второго передаточного выходного вала 27, сцепляется с шестерней 29b блока 29 дифференциала. Согласно этому передаточные выходные валы 26, 27 сформированы таким образом, чтобы обеспечивать вращение ведущих колес 4, 4 транспортного средства через блок 29 дифференциала.
Далее будет описан первый вариант выполнения настоящего изобретения. В указанном варианте выполнения изобретения используется электронный блок управления (ECU).
Приведение в действие двигателя
К примеру, если отсутствует возможность инициирования движения транспортного средства в режиме электромобиля (которая определяется электронным блоком управления) из-за низкой внешней температуры или уменьшенного напряжении (SOC) аккумуляторной батареи, имеется возможность привести в действие двигатель 2 электромотором 3.
Конкретнее, первое соединительное устройство SM1 заблаговременно соединено (занимает первое рабочее положение), в то время как второе соединительное устройство SM2 разъединено (занимает второе рабочее положение). При этом, как показано жирной линией на фиг.2, выходной вал электромотора 3 находится в положении соединения с выходным валом 2а двигателя, который соединен с ведущим валом 25 коробки передач.
В этом положении, когда тормоз транспортного средства выключен, имеется возможность привести в действие двигатель 2 через выходной вал 2а посредством электромотора 3. В данном случае, когда первое сцепление CL1 или второе сцепление CL2 блока 20 двойного сцепления переходит в сцепленное состояние, мощность от ведущего вала 25 коробки передач передается на первый входной вал 21 или на второй входной вал 22 и, соответственно, через блоки шестерен мощность передается на первый выходной вал 26 или на второй выходной вал 27. При этом ведущие колеса 4, 4 транспортного средства приводятся в движение через выходные шестерни 31 или 32, и транспортное средство способно незамедлительно начать движение.
Напротив, в приводном механизме с обычным двойным сцеплением, поскольку двигатель приводится в действие электромотором через двойное сцепление, перед приведением в действие двигателя необходимо задействовать управляющую мощность для включения сцепления. Согласно настоящему варианту выполнения изобретения двигатель 2 можно привести в действие непосредственно электромотором 3, что исключает необходимость в управляющей мощности для включения сцепления перед приведением в действие двигателя.
Инициирование движения транспортного средства задним ходом
Прежде всего, как и при описанном выше приведении в действие двигателя, первое соединительное устройство SM1 устанавливается в рабочее положение и двигатель 2 приводится в действие электромотором 3. Затем, когда четвертый синхронизатор SM4 перемещается к передаче (R) заднего хода, как уже описывалось, ведомая шестерня GRb блока GR шестерен передачи заднего хода соединяется с первым выходным валом 26, и формируется блок GR шестерен передачи заднего хода.
Поэтому после приведения в действие двигателя 2, когда второе сцепление CL2 блока 20 двойного сцепления приходит в сцепленное состояние, как показано жирной линией на фиг.3, мощность передается на второй входной вал 22 от ведущего вала 25 коробки передач, который соединен с выходным валом 2а двигателя, и, соответственно, через блок GR шестерен передачи заднего хода мощность передается на первый выходной вал 26. При этом ведущие колеса 4, 4 приводятся в движение через выходную шестерню 31 и транспортное средство незамедлительно может начать движение обратным ходом, т.е. будет двигаться назад. В этом случае электромотор 3, соответственно, оказывает помощь двигателю или выполняет рекуперацию энергии.
Инициирование движения транспортного средства в режиме электромобиля - движение транспортного средства, обеспечиваемое двигателем - движение транспортного средства с постоянной скоростью в режиме электромобиля.
В верхней части пояснительной схемы, приведенной на фиг.4, жирной линией показано изменение скорости вращения двигателя (отмеченное как «скорость вращения двигателя»), тонкой линией показано изменение скорости вращения электромотора (отмеченное как «скорость вращения электромотора») и пунктирной линией показано изменение скорости транспортного средства в зависимости от затраченного времени Т. В средней части схемы жирной линией показано сцепленное положение (ON) первого сцепления CL1, второго сцепления CL2, первого соединительного устройства (синхронизатора) SM1, второго соединительного устройства SM2, а также, соответственно, жирной линией показано положение от третьего до шестого синхронизаторов SM3-SM6, формирующих один из соответствующих двух блоков шестерен. На схеме точечной линией показано, что CL1, CL2, SM1, SM2 находятся в положении разъединения, или SM3-SM6 находятся в нейтральном положении N. В нижней части схемы жирной линией показано изменение крутящего момента двигателя (отмеченного как «крутящий момент двигателя») и тонкой линией показано изменение крутящего момента электромотора (отмеченного как «крутящий момент электромотора») в зависимости от затраченного времени Т.
(1) Инициирование движения транспортного средства в режиме электромобиля
Если транспортное средство остановлено и определено, что заряженность (SOC) аккумуляторной батареи равна заданной величине или превышает ее, а двигатель является теплым, выбирается вариант «инициирование движения транспортного средства в режиме электромобиля» и регулировка производится согласно фиг.4 и будет описана ниже.
Предварительно SM2 устанавливается в положение ON, SM3 смещается к G1 (первая передача), SM6 смещается к G6 (шестая передача), соответственно. Когда в произвольный момент времени (Т=Т1) выжата педаль акселератора, электромотор приводится в действие (крутящий момент электромотора является приблизительно постоянным), при этом CL1 и CL2 поддерживаются отключенными (разъединенными) и вращение от выходного вала 3а электромотора передается на первый входной вал 21 через SM2. Затем, поскольку вращение передается на первый выходной вал 26 через блок G1 шестерен, сформированный посредством SM3, инициирование движения транспортного средства в режиме электромобиля происходит на первой передаче, и скорость транспортного средства увеличивается, как показано на графике пунктирной линией. В это время двигатель 2 остановлен (крутящий момент двигателя =0).
(2) Крутящий момент электромотора возрастает, двигатель активируется на шестой передаче
Когда в момент времени (Т=Т2) скорость транспортного средства или требуемая движущая сила равны заданной величине или превышают ее, двигатель 2 приводится в действие. Одновременно второе сцепление CL2 устанавливается в положение ON, вращение от ведущего вала 25 коробки передач передается на второй входной вал 22. Затем, поскольку вращение передается через блок G6 шестерен, сформированный посредством SM6, на второй выходной вал 27, двигатель активируется на шестой передаче. А именно для приведения двигателя в действие без потери движущей силы, которая инициируется электромотором 3, добавляется необходимый крутящий момент (= момент, приводящий в действие двигатель × передаточное число на шестой передаче/передаточное число на первой передаче/коэффициент передачи трансмиссии). Таким образом, что касается двигателя, то он активируется на шестой передаче электромотором 3, активируемым на первой передаче, и происходит увеличение крутящего момента электродвигателя, при этом для активации двигателя 2 требуется меньший крутящий момент.
(3) Двигатель приводится в действие при переключении на первую передачу и при увеличении скорости вращения двигателя
Когда в момент времени (Т=Т3) двигатель 2 активирован, происходит переключение рабочих положений сцеплений блока 20 двойного сцепления. А именно CL2 не активировано (разъединено) и CL1 установлено в положение ON (соединено), в результате чего вращение от ведущего вала 25 коробки передач передается на первый входной вал 21, а не на второй входной вал 22. Затем через блок G1 шестерен, который сформирован посредством SM3, вращение передается на первый выходной вал 26, таким образом, двигатель активируется на первой передаче. При этом со стороны электромотора 3, как и в вышеописанном варианте (2), добавляется крутящий момент, необходимый для увеличения скорости вращения двигателя, при этом предотвращается потеря движущей силы. И затем, когда скорость вращения двигателя достигает заданной величины или превышает ее, двигатель запускается посредством впрыска топлива и воспламенения.
(4) Вторая передача двигателя
Далее SM6 в момент времени Т=Т4 смещается к G2 и снова переключается в рабочее положение двух сцеплений. А именно CL1 не приводится в действие, а CL2 устанавливается в положение ON (соединено), посредством которого вращение от ведущего вала 25 коробки передач передается на второй входной вал 22. Затем вращение через блок G2 шестерен, который сформирован посредством SM6, передается на второй выходной вал 27, и движение транспортного средства на второй передаче обеспечивается двигателем.
(5) Переключение электромотора 3 на третью передачу при движении транспортного средства на второй передаче, обеспечиваемом двигателем.
После переключения SM3 от G1 к G3 в момент времени Т=Т5 вращение от выходного вала 3а электромотора передается на первый входной вал 21 и затем через блок G3 шестерен передается на первый выходной вал 26, таким образом, электромотор 3 переключается на третью передачу. При этом наряду с уменьшением крутящего момента электромотора до 0, увеличивается крутящий момент двигателя, чтобы общее усилие, развиваемое двигателем, было равно требуемой величине.
(6) Увеличение крутящего момента электромотора в соответствии с требуемой движущей силой
Когда во время движения транспортного средства с помощью двигателя требуемая движущая сила достигает заданной величины или превышает ее, увеличивается крутящий момент электромотора. Кроме того, когда напряжение аккумуляторной батареи (SOC) становится равно заданной величине или меньше ее, зарядку производит электромотор 3, и в то же самое время добавляется крутящий момент двигателя, чтобы обеспечивалась необходимая общая движущая сила. Затем с момента времени (Т=Т6), когда скорость транспортного средства становится постоянной, крутящий момент двигателя начинает постепенно уменьшаться.
(7) Движение транспортного средства с постоянной скоростью
Во время движения транспортного средства, обеспечиваемого двигателем, если требуемая движущая сила равна заданной величине или меньше ее, скорость транспортного средства находится в пределах заданного диапазона и напряжение аккумуляторной батареи (SOC) равно заданной величине или превышает ее, то электронный блок управления (ECU) определяет, что возможно движение транспортного средства в режиме электромобиля с постоянной скоростью, и в момент времени (Т=Т7) CL2 переводится в отключенное положение (разъединяется). При этом режиме вращение от ведущего вала 25 коробки передач не передается ни на первый входной вал 21, ни на второй входной вал 22, вследствие чего останавливается двигатель (крутящий момент двигателя =0) или отключается подача топлива, либо останавливаются все цилиндры. Кроме того, SM6 перемещается от G2 к G6.
В данном случае электронный блок управления на основании режима переключения или навигационной информации принимает решение об остановке двигателя или остановке цилиндров.
(9) Приведение в действие двигателя на передаче от третьей до шестой при повторном ускорении транспортного средства
Во время вышеупомянутого движения транспортного средства в режиме электромобиля с постоянной скоростью транспортное средство в режиме электромобиля движется на третьей передаче, поскольку вращение от выходного вала 3а электромотора передается на первый входной вал 21 и через блок G3 шестерен передается на первый выходной вал 26. Во время указанного движения транспортного средства в режиме электромобиля при повторном ускорении активируется двигатель, поскольку SM2 устанавливается в положение ON, SM3 перемещается к G3 (третья передача) и SM6 перемещается к G6 (шестая передача) и когда CL2 устанавливается в положение ON (соединено) в момент времени (Т=Т8), как и в вышеупомянутом варианте (2), вращение от ведущего вала 25 коробки передач передается на второй входной вал 22 и через блок G6 шестерен передается на второй выходной вал 27, таким образом, двигатель активируется на шестой передаче.
И далее, в момент времени Т=Т9, когда CL2 находится в отключенном положении (разъединено) и CL1 устанавливается в положение ON (соединено), вращение от ведущего вала 25 коробки передач передается на первый входной вал 21 и через блок G3 шестерен передается на первый выходной вал 26, двигатель 2 приводится в действие на третьей передаче. В то же самое время на стороне электромотора 3, как и в вышеописанном варианте (2), при движении транспортного средства предотвращается потеря движущей силы при увеличении крутящего момента, необходимого, чтобы увеличить скорость вращения двигателя.
После этого, если электромотор 3 не используется, в момент времени Т=Т10 SM2 переключается на разъединение и электромотор останавливается (скорость вращения электромотора =0).
Согласно способу регулировки в вышеописанных вариантах (1)-(9) может быть уменьшен крутящий момент, требуемый для приведения в действие двигателя. Например, если на первой передаче передаточное отношение =12, а на шестой передаче передаточное отношение =2, крутящий момент, необходимый для приведения в действие двигателя, составляет только 120 (Нм)×2/12=20 (Нм). Таким образом, движение транспортного средства посредством электромотора и приведение в действие двигателя можно осуществить одним и тем же электромотором, без использования отдельного стартера (двигателя зажигания) ISG, что позволяет исключить ISG и существенно уменьшить вес и снизить стоимость транспортного средства.
Движение транспортного средства с высокой скоростью
На фиг.5 представлена пояснительная схема, иллюстрирующая способ регулировки во время движения транспортного средства с высокой скоростью и на которой, аналогично фиг.4, показано изменение скорости вращения двигателя, изменение скорости вращения электромотора и изменение скорости транспортного средства в зависимости от затраченного времени Т и показано соединение (ON)/разъединение CL1, CL2, SM1 и SM2, формирование блоков шестерен посредством SM3-SM6, а также показано изменение крутящего момента электромотора и изменение крутящего момента двигателя в зависимости от затраченного времени Т. Кроме того, в нижней части схемы показано состояние как электромотора 3, так и двигателя 2.
Как показано на фиг.5, во время движения транспортного средства с высокой скоростью, если только электромотор 3 не остановлен, то он оказывает помощь двигателю, при этом происходит рекуперация электроэнергии, или форсированная зарядка аккумулятора при установке SM1 в положение ON и соединении электромотора 3 с двигателем 2.
Таким образом, преемственность крутящего момента увеличивается во время помощи двигателю и рекуперации электроэнергии электромотором, и предотвращается уменьшение преемственности из-за того, что крутящий момент электромотора становится равным 0, когда блоки шестерен формируются заранее (во время предварительного переключения).
Движение транспортного средства при замедлении
На фиг.6 представлена пояснительная схема, иллюстрирующая способ регулировки во время движения транспортного средства со снижением скорости и на которой, аналогично фиг.5, показано изменение скорости вращения двигателя, изменение скорости вращения электромотора и изменение скорости транспортного средства в зависимости от затраченного времени Т и показано соединение (ОN)/разъединение CL1, CL2, SM1 и SM2, формирование блоков шестерен посредством SM3-SM6, а также показано изменение крутящего момента электромотора и изменение крутящего момента двигателя в зависимости от затраченного времени Т. Кроме того, в нижней части схемы показано состояние как электромотора 3, так и двигателя 2.
Как показано на фиг.6, когда электромотор находится в режиме рекуперации в момент времени Т=Т21, при котором высокая скорость движения транспортного средства, как показано выше на фиг.5, уменьшается посредством остановки всех цилиндров двигателя, SM2 устанавливается в положение ON и SM3 перемещается к G3 в момент времени Т=Т22 и транспортное средство двигается на третьей передаче посредством электромотора. Затем в момент времени Т=Т23 происходит переключение как CL1, так и CL2 в положение разъединения и двигатель останавливается. Кроме того, с момента времени Т=Т22 до момента (Т=Т30), когда SM3 переместился к G1 (Т=Т30), посредством установки рабочего положения SM6 и SM4 для предварительного переключения блоков G6, G4, G2 шестерен четных передач в режим ожидания, минимизируется задержка отклика при повторном введении в действие двигателя.
Переход при движении транспортного средства от снижения скорости к повторному ускорению
На фиг.7 представлена пояснительная схема, иллюстрирующая способ регулировки в случае повторного ускорения движения транспортного средства после снижения скорости и на которой, аналогично фиг.5 и 6, показано изменение скорости вращения двигателя, изменение скорости вращения электромотора и изменение скорости транспортного средства в зависимости от затраченного времени и показано соединение/разъединение CL1, CL2, SM1 и SM2, формирование блоков шестерен посредством SM3-SM6, а также показано изменение крутящего момента электромотора и изменение крутящего момента двигателя в зависимости от затраченного времени Т. Кроме того, в нижней части схемы показано состояние как электромотора 3, так и двигателя 2.
На фиг.7, как и ранее на фиг.6, показано, что во время рекуперации энергии при снижении скорости как CL1, так и CL2 находятся в положении разъединения и в момент времени (Т=Т23) двигатель остановлен, SM2 устанавливается в положение ON и SM3 перемещается к G3, и транспортное средство движется на третьей передаче посредством электромотора. В данном случае, когда CL2 устанавливается в положение ON в момент времени (Т=Т24), вращение от ведущего вала 25 коробки передач передается на второй входной вал 22. Затем через блок G4 шестерен, сформированный SM4, вращение передается на второй выходной вал 27, и двигатель снова приводится в действие на четвертой передаче. Таким образом, при увеличении крутящего момента электромотора увеличивается скорость вращения двигателя и имеется возможность быстро привести в действие двигатель.
После того как SM3 в момент времени Т=Т25 переключился от G3 в нейтральное положение N, вращение от выходного вала 3а коробки передач не передается на первый выходной вал 26 и крутящий момент электромотора 3 становится равным 0, таким образом, движение транспортного средства на постоянной скорости обеспечивается двигателем.
Перед вышеописанным повторным ускорением, устанавливая рабочее положение SM4 и SM6 для предварительного переключения блоков G6 и G4 шестерен четных передач в режим ожидания, можно минимизировать задержку отклика при повторном приведении в действие двигателя.
Переключение режима электромобиля в режим движения транспортного средства, обеспечиваемого двигателем
На фиг.8 представлена пояснительная схема, иллюстрирующая способ регулировки при переключении режима электромобиля в режим движения транспортного средства, обеспечиваемого двигателем, на которой, аналогично фиг.5-7, показано изменение скорости вращения двигателя, изменение скорости вращения электромотора и изменение скорости транспортного средства в зависимости от затраченного времени Т и показано соединение/разъединение CL1, CL2, SM, и SM2, формирование блоков шестерен посредством SM3-SM6, а также показано изменение крутящего момента электромотора и изменение крутящего момента двигателя в зависимости от затраченного времени Т. Кроме того, в нижней части схемы показано состояние как электромотора 3, так и двигателя 2.
Как показано на фиг.8, при выборе движения транспортного средства в режиме электромобиля, до момента (Т=Т31) времени инициирования движения в режиме электромобиля двигатель находится в режиме остановки, при этом как CL1, так и CL2 находятся в положении разъединения, транспортное средство находится в режиме ожидания, двигаясь на третьей передаче, при этом SM2 находится в положении ON и SM3 предварительно перемещается к G3. Затем, когда запущен режим электромобиля, как предварительно описано, во время движения транспортного средства в режиме электромобиля блоки G3 и G6 шестерен устанавливаются на постоянную передачу с момента времени Т=Т32. После этого CL2 устанавливается в положение ON в момент времени Т=Т3З, двигатель активируется на шестой передаче посредством G6, и затем CL1 устанавливается в положение ON и двигатель приводится в действие на третьей передаче посредством G3, далее CL2 снова устанавливается в положение ON в момент времени Т=Т34 и движение транспортного средства после ускорения на четвертой передаче (посредством включения G4) обеспечивается двигателем.
Когда скорость движения транспортного средства, обеспечиваемого двигателем, в момент времени (Т=Т35) достигает заданной скорости, то за счет разъединения SM2, соединения SM1 и установки SM3 в нейтральное положение N, а также за счет перемещения SM5 к G7 вращение от выходного вала 3а электродвигателя будет передаваться на ведущий вал 25 коробки передач через выходной вал 2а двигателя. В данном случае, когда CL2 переключается в положение разъединения и CL1 установлено в положение ON, выходная мощность электромотора передается от ведущего вала 25 коробки передач на первый входной вал 21, и после переключения передачи на максимальную седьмую передачу G7 крутящий момент электромотора становится равным 0 (Т=Т36).
После того как в момент времени Т=Т37 все цилиндры двигателя 2 остановлены, электромотор 3 переходит в режим рекуперации, и после уменьшения скорости вращения электромотора в момент времени Т=Т38 происходит разъединение SM1 и соединение SM2, а также перемещение SM3 к G3, в результате чего выход электромотора переключается на третью передачу через G3 от первого входного вала 21. При этом когда в момент времени (Т=Т38) крутящий момент электромотора реверсируется посредством торможения двигателем, электромотор 3 снова переходит в режим рекуперации и двигатель 2 останавливается в момент времени Т=Т39, электромотор 3 также останавливается в момент времени Т=Т40 и крутящий момент электромотора становится равным 0.
Модифицированный вариант выполнения изобретения
Согласно вышеупомянутому первому варианту выполнения изобретения предусмотрено два отдельных синхронизатора SM1 и SM2 в качестве соединительных устройств для соединения выходного вала 3а электромотора с ведущим валом 25 коробки передач и первым входным валом 21 (или вторым входным валом 22), чтобы обеспечивалась передача мощности, однако SM1 и SM2 могут быть совмещены с образованием единого синхронизатора. Указанный модифицированный вариант представлен на фиг.9.
Согласно модифицированному варианту выполнения изобретения, представленному на фиг.9, имеется синхронизатор SM12, который сформирован концентрически ведущему валу 25 коробки передач и расположен по направлению от внутренней стороны ротора 7 электромотора 3 к блоку 20 двойного сцепления. SM12 является механизмом, тормозящим завихрения на ведущем валу 25 коробки передач, и содержит синхронизирующую муфту 12, выполненную с возможностью перемещения в осевом направлении под действием исполнительного механизма, который не показан.
В данном случае синхронизирующая муфта 12 сформирована с возможностью избирательно устанавливаться в одно из положений, а именно, в первое рабочее положение, которое позволяет передавать мощность от выходного вала 3а электромотора на ведущий вал 25 коробки передач, и во второе рабочее положение, которое позволяет передавать мощность от выходного вала 3а электромотора на первый входной вал 21 или второй входной вал 22, а также может устанавливаться в нейтральное положение, которое отличается от вышеупомянутых двух рабочих положений и при котором не выполняется ни одна из вышеупомянутых двух передач мощности.
Согласно модифицированному варианту выполнения изобретения, представленному на фиг.9, имеется трансмиссия 1, в которой используется блок 20 двойного сцепления, а также имеется двигатель 2 и электромотор 3, и выполняется нижеследующая операция регулировки.
На фиг.10 в верхней части графика показано изменение скорости транспортного средства и состояние транспортного средства в зависимости от затраченного времени Т, а также жирной линией показано изменение скорости вращения двигателя и тонкой линией показано изменение скорости вращения электромотора в зависимости от затраченного времени Т. В нижней части графика показано изменение передач как двигателя, так и электромотора.
Как показано на фиг.10, первоначально как двигатель, так и электромотор остановлены, и предварительно выполнено переключение электромотора на первую передачу. Регулировка описана ниже.
(1) Начало движения транспортного средства посредством электромотора на первой передаче.
(2) Устанавливаются четные передачи G2, G4 или G6, при этом скорость вращения двигателя увеличивается, и он приводится в действие.
(3) Движение транспортного средства на второй передаче обеспечивается двигателем, и электромотор переключается на третью передачу.
(4) Движение транспортного средства в режиме электромобиля с постоянной скоростью на третьей передаче и остановка двигателя.
(5) Устанавливаются нечетные передачи G1, G3, G5 или G7, двигатель приводится в действие, и движение транспортного средства с постоянной скоростью обеспечивается двигателем, при этом электромотор остановлен.
(6) При переходе от средней скорости движения транспортного средства к высокой скорости задействованы двигатель и электромотор (помощь двигателю при движении и рекуперация обеспечивается электромотором). При движении с постоянной скоростью транспортного средства, обеспечиваемом двигателем, электромотор остановлен, а при рекуперации остановлены все цилиндры двигателя.
(7) Когда происходит рекуперация энергии при снижении скорости, двигатель приводится в действие на шестой передаче, и при рекуперации энергии все цилиндры остановлены. Электромотор включается на пятой передаче. Целью этого является минимизация крутящего момента торможения, производимого двигателем, и улучшение приемистости двигателя при повторном приведении в действие.
(8) При снижении скорости изменение скорости происходит за счет переключения передач при одновременном подключении всех отключенных цилиндров и при создании крутящего момента посредством торможения двигателем.
(9) Во время рекуперации при снижении скорости от средней скорости до низкой скорости двигатель остановлен, и электромотор работает на первой передаче.
(10) Чтобы быстро инициировать движение транспортного средства, выбираются нечетные передачи G1, G3, G5 или G7, скорость вращения двигателя увеличивается и двигатель приводится в действие.
Второй предпочтительный вариант выполнения изобретения
На фиг.11 схематично показана конструкция гибридного транспортного средства, содержащего силовую установку согласно второму предпочтительному варианту выполнения изобретения. Поскольку данный вариант выполнения изобретения отличается от первого варианта выполнения изобретения только перечисленными ниже признаками, одинаковые ссылочные позиции обозначают одинаковые элементы в обоих вариантах выполнения изобретения, в связи с этим объяснение будет сокращено.
Согласно данному варианту выполнения изобретения используется двойной основной вал, и ниже представлены отличия от первого варианта выполнения изобретения.
Согласно данному варианту выполнения изобретения трансмиссия содержит блок 20 двойного сцепления, полый первый входной вал 41, являющийся продолжением ведущего вала 25 коробки передач, который вращается вместе с выходным валом 2а двигателя 2, второй входной вал 42, размещенный параллельно первому входному валу 41, блоки G1 - G7 и GR шестерен с различными последовательными передаточными отношениями со стороны двигателя 2 и один выходной вал 44. Выходной вал 44 имеет один концевой участок с закрепленной на нем выходной шестерней 31, и он конфигурирован так, чтобы посредством сцепления выходной шестерни 31 с шестерней 29b блока 29 дифференциала обеспечивалось вращение ведущих колес 4, 4 транспортного средства через блок 29 дифференциала.
В то время как первый входной вал 41, который является одним из основных валов, соединен с ведущим валом 25 коробки передач через первое сцепление CL1 блока 20 двойного сцепления, второй входной вал 42, который является другим основным валом, также соединен с ведущим валом 25 коробки передач через второе сцепление CL2, которое согласуется посредством промежуточной шестерни 43 с первым сцеплением CL1 блока 20 двойного сцепления.
Среди вышеупомянутых блоков шестерен ведущие шестерни G1a, G5a, G3a и G7a блоков G1, G5, G3 и G7 шестерен нечетных передач соединяются с первым входным валом 41 через SM7 и SM9 соответственно, и ведущие шестерни G2a, G4a, G6a и GRa блоков R, G2, G4, G6 и GR шестерен четных передач соединяются со вторым входным валом 42 через SM8 и SM10 соответственно. Кроме того, ведомые шестерни G1b, G4b, G3b и G6b, которые являются общими для каждой пары блоков G1 и G2, G4 и G5, G3 и GR, G6 и G7 шестерен, установлены с возможностью вращения на выходном валу 31 трансмиссии.
Среди вышеупомянутых SM7-SM10 (от седьмого до десятого синхронизаторов) синхронизаторы SM7 и SM9 способны тормозить завихрения на первом входным валу 41 и содержат синхронизирующие муфты 37, 39, способные перемещаться в осевом направлении под действием исполнительного механизма, который не показан. При перемещении соответствующих синхронизирующих муфт 37, 39 из указанного нейтрального положения N к ведущей шестерне G1a или G5a либо к ведущей шестерне G3a или G7a происходит соединение с первым входным валом 41 ведущей шестерни G1a или G5a либо ведущей шестерни G3a или G7a, таким образом, избирательно формируются блоки G1 или G5, G3 или G7 шестерен.
Кроме того, синхронизаторы SM8 и SM10 способны тормозить завихрения на втором входном валу 42 и содержат синхронизирующие муфты 38, 40, способные перемещаться в осевом направлении под действием исполнительного механизма, который не показан. При перемещении соответствующих синхронизирующих муфт 38, 40 из указанного нейтрального положения N к ведущей шестерне G2a или G4a либо к ведущей шестерне G6a или GRa происходит соединение со вторым входным валом 42 ведущей шестерни G2a или G4a либо ведущей шестерни G6a или GRa, таким образом, избирательно формируются блоки G2 или G4; G6 или GR шестерен.
Согласно второму предпочтительному варианту выполнения изобретения гибридное транспортное средство, содержащее двойной основной вал, работает аналогично гибридному транспортному средству согласно первому варианту выполнения изобретения, и достигается аналогичный эффект.
В вышеупомянутых вариантах выполнения изобретения синхронизатор SM используется в качестве соединительного устройства для соединения выходного вала электромотора с выходным валом двигателя или с входным валом. Однако это не является ограничительным, и могут использоваться соответствующие соединительные средства типа сцепления, переключаемого посредством исполнительного механизма по команде на переключение.
Кроме того, блок двойного сцепления не ограничивается конструкцией, используемой в первом варианте выполнения изобретения и во втором варианте выполнения изобретения, и может иметь любую конструкцию, которая способна передавать мощность посредством двух сцеплений.
Как описано выше, благодаря размещению электромотора в нижней части сцепления трансмиссии с двойным сцеплением и при наличии трансмиссии, исключающей какие-либо дополнительные средства для обеспечения работы двойного сцепления из состояния остановки, не увеличивается общая длина и общая ширина гибридного транспортного средства согласно изобретению, что способствует уменьшению веса и снижению стоимости транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668448C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2659151C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИИ | 2013 |
|
RU2643901C2 |
| Модуль привода для гибридного транспортного средства | 2018 |
|
RU2683136C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2555394C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2694387C1 |
| Устройство адаптивного управления для пусковой муфты транспортного средства | 2014 |
|
RU2644492C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ОТКАЗОУСТОЙЧИВЫМ РЕЖИМОМ ДВИЖЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2670562C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2557103C1 |
Изобретение относится к гибридным транспортным средствам, которые оборудованы трансмиссией с двойным сцеплением. Гибридное транспортное средство содержит двигатель, электромотор, трансмиссию. Трансмиссия содержит ведущий и выходной валы коробки передач, блок двойного сцепления, первый входной и второй входной валы, блоки шестерен, первое и второе соединительные устройства. Первое соединительное устройство обеспечивает переключение между первым рабочим положением для передачи мощности от выходного вала электромотора к ведущему валу коробки передач и вторым рабочим положением для прерывания передачи мощности. Второе соединительное устройство обеспечивает переключения между первым рабочим положением для передачи мощности от выходного вала электромотора к первому входному валу или второму входному валу и вторым рабочим положением для прерывания передачи мощности. Первый и второй входные валы расположены коаксиально между двигателем и блоком двойного сцепления. Первый и второй входные валы приводятся в движение электромотором через соединительное устройство и блок двойного сцепления. Технический результат заключается в снижении габаритов и массы транспортного средства. 8 з.п. ф-лы, 11 ил.
1. Гибридное транспортное средство, содержащее двигатель и электромотор в качестве источника мощности, для приведения в движение ведомых узлов через трансмиссию, при этом трансмиссия содержит ведущий вал коробки передач, предназначенный для передачи мощности от двигателя, и выходной вал коробки передач, предназначенный для передачи мощности и приведения в движение ведомых узлов, блок двойного сцепления, имеющий первое сцепление и второе сцепление и расположенный коаксиально ведущему валу коробки передач, первый входной вал, выполненный с возможностью соединения с ведущим валом коробки передач через первое сцепление, и второй входной вал, выполненный с возможностью соединения с ведущим валом коробки передач через второе сцепление, блоки шестерен, выполненные с возможностью переключения для соединения каждого из валов, а именно первого входного вала и второго входного вала с выходным валом коробки передач, первое соединительное устройство, выполненное с возможностью избирательного переключения между первым рабочим положением для передачи мощности от выходного вала электромотора к ведущему валу коробки передач и вторым рабочим положением для прерывания передачи мощности, и второе соединительное устройство, выполненное с возможностью избирательного переключения между первым рабочим положением для передачи мощности от выходного вала электромотора к первому входному валу или второму входному валу и вторым рабочим положением для прерывания передачи мощности, причем первый входной вал и второй входной вал расположены коаксиально между двигателем и блоком двойного сцепления и приводятся в движение электромотором через соединительное устройство и блок двойного сцепления.
2. Транспортное средство по п.1, в котором трансмиссия предназначена для соединения электромотора с ведущим валом коробки передач посредством первого соединительного устройства при холодном запуске двигателя или при степени заряженности (SOC) аккумуляторной батареи, не превышающей заданную величину для приведения в действие двигателя электромотором.
3. Транспортное средство по п.1 или 2, в котором первое соединительное устройство или второе соединительное устройство выполнено с возможностью установки в первое рабочее положение согласно состоянию транспортного средства во время приостановки транспортного средства или непосредственно перед приостановкой.
4. Транспортное средство по п.3, в котором второе соединительное устройство выполнено с возможностью установки в первое рабочее положение, когда возможно инициирование движения в режиме электромобиля посредством электромотора при соответствующем состоянии блока питания электромотора и двигателя.
5. Транспортное средство по п.4, в котором при возможности инициирования движения в режиме электромобиля после приостановки движения транспортного средства трансмиссия в процессе приостановки предварительно устанавливает нечетную передачу или четную передачу посредством переключения блока шестерен, и после завершения приостановки транспортного средства второе соединительное устройство устанавливается в первое рабочее положение, при этом транспортное средство начинает движение под действием движущей силы электромотора, и когда скорость транспортного средства достигает заданной величины или превышает ее, крутящий момент электромотора возрастает, и при включении сцепления со стороны блока шестерен, которые не приведены в движение, двигатель активируется электромотором.
6. Транспортное средство по п.5, в котором при увеличении числа оборотов двигателя до заданного значения, необходимого для активации двигателя, при этом движение транспортного средства обеспечивается запущенным двигателем при поддержании фиксированного передаточного отношения трансмиссии, и когда скорость транспортного средства снижается и становится меньше заданной величины, двигатель приводится в действие после выравнивания скорости его вращения со скоростью вращения электромотора, а изменение скорости движущегося транспортного средства осуществляется посредством переключения блоков шестерен на произвольно выбранную передачу.
7. Транспортное средство по п.1, в котором трансмиссия выполнена с возможностью предварительной установки передачи заднего хода посредством переключения блоков шестерен при выборе передачи заднего хода во время приостановки движения транспортного средства, а при инициировании движения двигатель выполнен с возможностью приведения в действие посредством соединения электромотора и входного вала трансмиссии через соединительное устройство, при этом движение транспортного средства назад обеспечивается двигателем.
8. Транспортное средство по п.1, в котором при выборе движения транспортного средства в режиме электромобиля посредством электромотора трансмиссия устанавливает заданную передачу переключением блоков шестерен, а при установке второго соединительного устройства в первое рабочее положение транспортное средство выполнено с возможностью движения в режиме электромобиля посредством электромотора на заданной передаче.
9. Транспортное средство по п.1, в котором при замедлении движения двигатель находится в режиме остановки, а посредством переключения блоков шестерен трансмиссии устанавливается заданная передача и посредством электромотора производится рекуперация электроэнергии.
| JP 2008143242 А, 26.06.2008 | |||
| JP 9156388 A, 17.06.1997 | |||
| ПРИВОДНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2080266C1 |
| US 2003013569 A1, 16.01.2003. | |||

