Область техники
Настоящее изобретение относится к устройству управления для гибридного транспортного средства, которое имеет двигатель и электромотор в качестве источника приведения в движение с первым элементом сцепления, вставленным между двигателем и электромотором, в то время как второй элемент сцепления вставлен между электромотором и ведущим колесом.
Уровень техники
В таком гибридном транспортном средстве, имеющем первый элемент сцепления между двигателем и электромотором и имеющем второй элемент сцепления между электромотором и ведущим колесом, второй элемент сцепления защищается за счет пресечения формирования избыточного тепла, когда нагрузка в системе передачи движущей силы является большой. Для того, чтобы достигать этой цели, известна такая система (см., например, Патентный Документ 1), в которой, когда нагрузка в системе передачи движущей силы равна предварительно определенному значению или больше, первый элемент CL1 сцепления расцепляется с работающим двигателем, в то время как второй элемент CL2 сцепления сцеплен с проскальзыванием, так что электромотор удерживается на скорости вращения, более низкой, чем скорость вращения двигателя.
Документы предшествующего уровня техники
Патентный документ 1: Публикация японской патентной заявки № 2009-132195 A.
Задача, которая должна быть решена изобретением
Однако в устройстве управления гибридного транспортного средства, описанном выше, хотя скорость вращения с проскальзыванием второго элемента CL2 сцепления уменьшается за счет электромотора, стратегия не может быть применена, когда выходная мощность аккумулятора или выходная мощность электромотора ограничена.
Настоящее изобретение осуществлено с учетом вышеописанной проблемы, и его задачей является создание устройства управления для гибридного транспортного средства, которое может достигать уменьшения в крутящем моменте электромотора в режиме управления приведением в движение с проскальзыванием электромотора, который должен выполняться, когда нагрузка в системе передачи движущей силы является большой.
Средства решения задачи
Для решения этой задачи устройство управления для гибридного транспортного средства согласно настоящему изобретению предоставляется с двигателем, электромотором, первым элементом сцепления, устройством определения нагрузки системы передачи движущей силы и блоком управления приведением в движение с проскальзыванием двигателя/электромотора. Электромотор сконфигурирован, чтобы выводить движущую силу для транспортного средства в дополнение к запуску двигателя. Первый элемент сцепления вставлен между двигателем и электромотором для выборочного сцепления и расцепления двигателя и электромотора. Второй элемент сцепления вставлен между электромотором и ведущим колесом для выборочного сцепления и расцепления электромотора и ведущего колеса. Устройство определения нагрузки системы передачи движущей силы либо определяет, либо оценивает нагрузку системы передачи движущей силы.
Блок управления приведением в движение с проскальзыванием двигателя/электромотора функционирует, когда нагрузка системы передачи движущей силы равна или больше предварительно определенного значения, чтобы сцеплять с проскальзыванием первый элемент сцепления с двигателем, работающим с предварительно определенной скоростью вращения, в то же время сцепляя с проскальзыванием второй элемент сцепления с электромотором, вращающимся со скоростью вращения, более низкой, чем предварительно определенная скорость вращения.
Преимущества изобретения
Таким образом, когда нагрузка системы передачи движущей силы равна предварительно определенному значению или больше, блок управления приведением в движение с проскальзыванием двигателя/электромотора функционирует, чтобы сцеплять с проскальзыванием первый элемент сцепления с двигателем, работающим с предварительно определенной скоростью вращения, в то же время сцепляя с проскальзыванием второй элемент сцепления со скоростью вращения, более низкой, чем предварительно определенная скорость вращения.
Т.е. поскольку электромотор вращается со скоростью вращения, более низкой, чем скорость двигателя, возможно уменьшать величину проскальзывания второго элемента сцепления, так что возможно подавлять величину нагрева второго элемента сцепления. Дополнительно, поскольку двигатель находится в рабочем состоянии, а первый элемент сцепления сцепляется с проскальзыванием, крутящий момент приведения в движение от двигателя передается через первую муфту сцепления, таким образом, требуемый крутящий момент электромотора может быть уменьшен на передаваемую величину крутящего момента двигателя.
В результате, возможно уменьшать крутящий момент электромотора во время режима управления приведением в движение с проскальзыванием электромотора, когда нагрузка системы передачи движущей силы является высокой.
Краткое описание чертежей
Фиг. 1 является общей конфигурацией системы гибридного транспортного средства с приводом на задние колеса, к которому применяется устройство управления первого варианта осуществления;
Фиг. 2 является блок-схемой управления, иллюстрирующей программу процесса вычисления в интегрированном контроллере в первом варианте осуществления;
Фиг. 3 является примером карты целевого крутящего момента приведения в движение, используемого в секции вычисления целевого крутящего момента приведения в движение для вычисления целевого крутящего момента приведения в движение;
Фиг. 4 является графиком, представляющим соотношение между оцененным уклоном, представляющим критерии выбора режима в блоке выбора режима на фиг. 2, и картой режима;
Фиг. 5 является примером карты нормального режима в выборе целевого режима в секции выбора режима, показанной на фиг. 2;
Фиг. 6 является графиком, иллюстрирующим три шаблона карты режима, соответствующего MWSC, используемой при выборе целевого режима в секции выбора режима на фиг. 2;
Фиг. 7 является блок-схемой последовательности операций, показывающей последовательность операций процесса управления переключением режимов приведения в движение, выполняемого объединенным контроллером в первом варианте осуществления;
Фиг. 8 является схематичным чертежом, иллюстрирующим рабочую точку каждого актуатора во время WSC-управления;
Фиг. 9 является схематичным чертежом, иллюстрирующим рабочую точку каждого актуатора во время MWSC-управления;
Фиг. 10 является схематичным чертежом, иллюстрирующим рабочую точку каждого актуатора во время MWSC+CL1-управления с проскальзыванием;
Фиг. 11 является временной диаграммой в случае во время движения с MWSC+CL1-управлением с проскальзыванием, выбранным в первом варианте осуществления (целевой крутящий момент муфты CL1 = целевой крутящий момент приведения в движение - α), с движением в соответствии с уклоном при постоянном открытии акселератора;
Фиг. 12 является временной диаграммой в случае во время движения с MWSC+CL1-управлением с проскальзыванием, выбранным во втором варианте осуществления (целевой крутящий момент муфты CL1 = целевой крутящий момент приведения в движение), с движением в соответствии с уклоном при постоянном открытии акселератора;
Фиг. 13 является временной диаграммой случая во время движения с MWSC+CL1-управлением с проскальзыванием, выбранным в третьем варианте осуществления (целевой крутящий момент муфты CL1 = целевой крутящий момент приведения в движение + крутящий момент выработки электрической мощности), с движением в соответствии с уклоном при постоянном открытии акселератора; и
Фиг. 14 является временной диаграммой случая во время движения с совместным MWSC+CL1-управлением с проскальзыванием, выбранным в четвертом варианте осуществления MWSC+CL1-управления с проскальзыванием, с движением в соответствии с уклоном при постоянном открытии акселератора.
Далее в данном документе приведено описание оптимального варианта осуществления для реализации устройства управления в гибридном транспортном средстве согласно настоящему изобретению со ссылкой на первый-четвертый варианты осуществления, показанные на сопровождающих чертежах.
Первый вариант осуществления изобретения
Сначала будет приведено описание конфигурации.
Конфигурация устройства управления в гибридном транспортном средстве в первом варианте осуществления описывается посредством разделения на "конфигурацию системы", "конфигурацию управления объединенного контроллера" и "конфигурацию управления переключением режимов приведения в движение", соответственно.
Конфигурация системы
Фиг. 1 является общей схемой системы, показывающей устройство управления гибридного транспортного средства с приводом на задние колеса, к которому применяется первый вариант осуществления. Ниже, со ссылкой на фиг. 1, описывается конфигурация системы (конфигурации системы приведения в движение и системы управления).
Как показано на фиг. 1, система приведения в движение в гибридном транспортном средстве включает в себя двигатель E, первую муфту CL1 (первый элемент сцепления), электромотор-генератор MG (электромотор), вторую муфту CL2 (второй элемент сцепления), автоматическую коробку AT передач, карданный вал PS, дифференциал DF, левый ведущий вал DSL, правый ведущий вал DSR, левое заднее колесо RL (ведущее колесо) и правое заднее колесо RR (ведущее колесо). Отметим, что FL обозначает левое переднее колесо, а FR обозначает правое переднее колесо.
Двигатель E является, например, бензиновым двигателем и включает в себя дроссельную заслонку, угол открытия заслонки управляется на основе управляющей команды от контроллера 1 двигателя. Здесь маховик FW предусмотрен на выходном валу двигателя E.
Первая муфта является муфтой, вставленной между двигателем E и электромотором-генератором MG и которая, на основе управляющей команды от контроллера 5 первой муфты, описанного ниже, управляется так, чтобы выборочно осуществлять сцепление и расцепление, включающее в себя сцепление с проскальзыванием посредством гидравлического давления, созданного гидравлическим блоком 6 первой муфты.
Электромотор-генератор MG является статором синхронного электромотора-генератора, в котором постоянные магниты вставлены в ротор, а обмотка статора намотана вокруг статора. Электромотор-генератор MG управляется посредством трехфазного переменного тока, формируемого инвертором 3 и подаваемого на основе управляющей команды от контроллера 2 электромотора, описанного ниже. Этот электромотор-генератор MG может работать как электромотор, который вращается посредством приема подаваемой электрической энергии от аккумулятора 4 (далее в данном документе это состояние называется состоянием "приведения в движение"). В случае, когда ротор вращается посредством внешней силы, электромотор-генератор MG может также работать как генератор, который генерирует электродвижущую силу на обоих концах обмотки статора, чтобы предоставлять возможность заряда аккумулятора 4 (далее в данном документе это рабочее состояние называется "рекуперативным" состоянием). Отметим, что ротор этого электромотора-генератора MG соединяется с входным валом автоматической коробки AT передач через демпфер (не показан).
Вторая муфта CL2 является муфтой, которая вставлена между электромотором-генератором MG и левым и правым задними колесами RL. На основе управляющей команды от AT-контроллера 7, который будет описан ниже, вторая муфта CL2 управляется так, чтобы выборочно сцепляться и расцепляться со сцеплением с проскальзыванием, включенным посредством гидравлического давления, сформированного гидравлическим блоком 8 второй муфты.
Автоматическая коробка AT передач является ступенчатой автоматической коробкой передач, в которой шестерни ограниченных ступеней, такие как семь передних передач и одна задняя передача, могут автоматически переключаться согласно условиям эксплуатации транспортного средства, таким как скорость транспортного средства и угол открытия акселератора. Вторая муфта CL2 необязательно является муфтой, которая заново добавлена в качестве выделенной муфты. Вместо этого, некоторые элементы муфты множества муфт, которые выборочно сцепляются на соответствующей ступени переключения передач автоматической коробки AT передач, могут содержать вторую муфту CL2. Дополнительно, выходной вал автоматической коробки AT передач соединяется с задним левым и задним правым колесами RL, RR через карданный вал PS, дифференциальную передачу DF, левый ведущий вал DSL и правый ведущий вал DSR, соответственно.
Эта гибридная система приведения в движение имеет три режима приведения в движение согласно состоянию сцепления и выключения/расцепления первой муфты CL1. Первый режим приведения в движение является электрическим режимом приведения в движение транспортного средства (далее в данном документе называемым EV-режимом приведения в движение), в котором первая муфта CL1 находится в расцепленном состоянии, и транспортное средство движется только посредством движущей энергии электромотора-генератора MG в качестве источника энергии. Второй режим приведения в движение является гибридным режимом приведения в движение (далее в данном документе называемым HEV-режимом приведения в движение), в котором первая муфта CL1 находится в сцепленном состоянии, и транспортное средство движется, при этом включая в себя двигатель E в качестве источника энергии. Третий режим приведения в движение является режимом приведения в движение с проскальзыванием с используемым двигателем (режим приведения в движение с плавным стартом муфты, далее в данном документе называемый WSC-режимом приведения в движение), в котором первая муфта CL1 находится в сцепленном состоянии, а вторая муфта CL2 управляется с проскальзыванием, и транспортное средство движется, при этом двигатель E включен в него в качестве источника энергии. Находясь в WSC-режиме приведения в движение, транспортное средство может выполнять медленное приведение в движение, особенно когда состояние заряда (SOC) аккумулятора является низким или когда температура воды двигателя является низкой. Отметим, что при переходе из EV-режима приведения в движение в HEV-режим приведения в движение первая муфта CL1 сцеплена, и двигатель будет запускаться с использованием крутящего момента электромотора-генератора MG.
Дополнительно, на дороге, идущей вверх по склону или т.п., с уклоном, равным предварительно определенному значению или больше, когда водитель управляет педалью акселератора, чтобы удерживать транспортное средство в остановленном состоянии, чтобы выполнять удержание на подъеме с помощью акселератора, величина проскальзывания второй муфты CL2 может быть слишком большой в течение длительного периода времени при переключении в WSC-режим приведения в движение. Это обусловлено тем, что скорость вращения двигателя E не может быть задана ниже, чем скорость холостого хода двигателя. Соответственно, для того, чтобы выполнять защиту муфты CL2, транспортное средство дополнительно снабжено режимом приведения в движение с проскальзыванием электромотора с расцепленной муфтой CL1 (режим приведения в движение от электромотора с плавным запуском муфты, далее в данном документе называемый MWSC-режимом приведения в движение), а также режимом приведения в движение с проскальзыванием электромотора со сцепленной с проскальзыванием муфтой CL1 (далее в данном документе называемым MWSC+CL1-режимом приведения в движение с управлением проскальзыванием). В "MWSC-режиме приведения в движение", с работающими как двигателем E, так и электромотором-генератором MG, первая муфта CL1 расцеплена, в то время как вторая муфта CL2 сцеплена с проскальзыванием для движения. В "MWSC+CL1-режиме приведения в движение с управлением проскальзыванием", с работающими как двигателем E, так и электромотором-генератором MG, и первая муфта CL1, и вторая муфта CL2 управляются с проскальзыванием для продвижения вперед транспортного средства. Отметим, что описание будет детализировано ниже.
Вышеописанный HEV-режим приведения в движение включает в себя три режима приведения в движение: режим приведения в движение от двигателя, режим приведения в движение с помощью электромотора и режим выработки электрической энергии во время движения или режим приведения в движение с выработкой энергии.
В режиме приведения в движение от двигателя ведущие колеса приводятся в движение только с помощью двигателя E в качестве источника мощности. В режиме приведения в движение с помощью электромотора ведущие колеса приводятся в движение с помощью как двигателя E, так и электромотора-генератора MG в качестве источников мощности. В режиме приведения в движение с выработкой энергии, в то время как ведущие колеса RL, RR приводятся в движение с помощью двигателя E в качестве источника приведения в движение, электромотор-генератор MG работает как генератор. Дополнительно, во время операций замедления вышеописанный HEV-режим приведения в движение включает в себя три режима приведения в движение: режим приведения в движение от двигателя, режим приведения в движение с помощью электромотора и режим выработки электрической энергии во время движения (далее в данном документе называемый режимом приведения в движение с выработкой энергии).
В режиме приведения в движение от двигателя ведущие колеса приводятся в движение только с помощью двигателя E в качестве источника энергии. В режиме приведения в движение с помощью электромотора ведущие колеса приводятся в движение с помощью как двигателя E, так и электромотора-генератора MG в качестве источников энергии. В режиме приведения в движение с выработкой энергии, в то время как ведущие колеса RL, RR приводятся в движение с помощью двигателя E в качестве источника энергии, электромотор-генератор MG работает как генератор, чтобы заряжать аккумулятор 4. Дополнительно, во время операции замедления, выработка энергии электромотором-генератором MG посредством энергии рекуперативного торможения используется для зарядки аккумулятора 4. В качестве дополнительного режима, при остановленном транспортном средстве, режим выработки предоставляется так, чтобы давать возможность электромотору-генератору MG работать за счет энергии двигателя E.
Как показано на фиг. 1, система управления гибридного транспортного средства снабжена контроллером 1 двигателя, контроллером 2 электромотора, инвертором 3, аккумулятором 4, контроллером 5 первой муфты, гидравлическим блоком 6 первой муфты, AT-контроллером 7, гидравлическим блоком 8 второй муфты, контроллером 9 тормоза и объединенным контроллером 10. Контроллер 1 двигателя, контроллер 2 электромотора, контроллер 5 первой муфты, AT-контроллер 7, контроллер 9 тормоза и объединенный контроллер 10 связываются через CAN-линию 11 связи, чтобы предоставлять возможность обмена информацией друг с другом.
Контроллер 1 двигателя принимает информацию о скорости вращения двигателя от датчика 12 оборотов двигателя и выводит команду, которая управляет рабочей точкой двигателя (Ne: скорость вращения двигателя, Te: крутящий момент двигателя), актуатору дроссельной заслонки (не показан на чертеже), например, в соответствии с командой целевого крутящего момента двигателя от объединенного контроллера 10. Содержимое управления двигателем подробно описывается ниже. Информация, такая как скорость Ne вращения двигателя и т.д., отправляется объединенному контроллеру 10 через CAN-линию 11 связи.
Контроллер 2 электромотора принимает информацию от преобразователя 13, который определяет угловое положение ротора электромотора-генератора MG и выводит команду, которая управляет рабочей точкой электромотора (Nm: скорость вращения электромотора-генератора, Tm: крутящий момент электромотора-генератора), электромотора-генератора MG, инвертору 3 в соответствии с командой целевого крутящего момента электромотора-генератора от объединенного контроллера 10. Отметим, что контроллер 2 электромотора проверяет или наблюдает за SOC аккумулятора, указывающим заряженное состояние аккумулятора 4. Информация, касающаяся SOC аккумулятора, используется, чтобы управлять электромотором-генератором MG, и также отправляется объединенному контроллеру 10 через CAN-линию 11 связи.
Контроллер 5 первой муфты принимает информацию датчика как от датчика 14 гидравлического давления первой муфты, так и от датчика 15 хода первой муфты и выводит команду гидравлическому блоку 6 первой муфты в соответствии с командой управления первой муфты от объединенного контроллера 10, чтобы выборочно управлять сцеплением и расцеплением первой муфты CL1. Отметим, что информация о ходе C1S первой муфты отправляется объединенному контроллеру 10 через CAN-линию 11 связи.
AT-контроллер 7 принимает входную информацию, соответствующую информации датчика от датчика 16 угла открытия акселератора, датчика 17 скорости транспортного средства и датчика 18 гидравлического давления второй муфты и переключателя режимов движения, который выводит сигнал, соответствующий положению рычага переключения режимов движения, который задействуется водителем. AT-контроллер 7 затем выводит команду, которая выборочно управляет сцеплением и расцеплением второй муфты CL2, гидравлическому блоку 8 второй муфты в клапане управления гидравлическим давлением AT в соответствии с командой управления второй муфтой от объединенного контроллера 10. Отметим, что информация об угле APO открытия акселератора и скорости VSP транспортного средства и информация от переключателя режимов движения отправляется объединенному контроллеру 10 по CAN-линии 11 связи.
Контроллер 9 тормоза принимает информацию датчика от датчика 19 скорости ходового колеса, который определяет скорость каждого колеса для четырех ходовых колес, и датчика 20 хода тормоза. Контроллер 9 тормоза выполняет управление рекуперативным согласованным торможением на основе команды BS рекуперативного согласованного управления от объединенного контроллера 10, когда, например, тормозного усилия недостаточно, чтобы удовлетворять тормозному усилию, требуемому согласно датчику 20 хода тормоза в случае, когда только рекуперативное тормозное усилие применяется при операции торможения посредством нажатия на педаль тормоза. Таким образом, недостаток тормозного усилия компенсируется механическим тормозным усилием (тормозным усилием посредством фрикционного тормоза).
Объединенный контроллер 10 управляет потреблением энергии всего транспортного средства для того, чтобы предоставлять возможность транспортному средству двигаться с максимальной эффективностью. Объединенный контроллер 10 принимает информацию от датчика 21 скорости вращения электромотора, который определяет скорость Nm вращения электромотора, датчика 22 выходной скорости вращения второй муфты, который определяет выходную скорость N2out вращения второй муфты CL2, датчика 23 крутящего момента второй муфты, который определяет максимальный запас TCL2 по передаваемому крутящему моменту второй муфты CL2, датчика 24 гидравлического давления тормоза, датчика 10a температуры, который определяет температуру второй муфты CL2, и G-датчика 10b, который определяет продольное ускорение. Объединенный контроллер 10 также принимает информацию, полученную по CAN-линии 11 связи.
Дополнительно, объединенный контроллер 10 выполняет управление работой двигателя E посредством управляющей команды контроллеру 1 двигателя, управление работой электромотора-генератора MG посредством управляющей команды контроллеру 2 электромотора, управление выборочным сцеплением и расцеплением первой муфты CL1 посредством управляющей команды контроллеру 5 первой муфты, и управление выборочным сцеплением и расцеплением второй муфты CL2 посредством управляющей команды AT-контроллеру 7.
Конфигурация управления объединенного контроллера
Далее, со ссылкой на блок-схему, показанную на фиг. 2, будет приведено описание конфигурации управления, которая вычисляется посредством объединенного контроллера 10 в первом варианте осуществления. Например, эта операция вычисляется объединенным контроллером 10 в периоде управления каждые 10 мс.
Как показано на фиг. 2, объединенный контроллер 10 снабжен блоком 100 вычисления целевого крутящего момента приведения в движение, блоком 200 выбора режима, блоком 300 вычисления целевого заряда-разряда, блоком 400 команды рабочей точки и блоком 500 управления трансмиссией.
Блок 100 вычисления целевого крутящего момента приведения в движение использует карту целевого крутящего момента приведения в движение, показанный на фиг. 3, чтобы вычислять целевой крутящий момент tFoO приведения в движение на основе скорости VSP транспортного средства и открытия APO акселератора.
Блок 200 выбора режима имеет секцию 201 вычисления оценки уклона дороги (устройство определения нагрузки системы передачи движущей силы), которая оценивает уклон дороги на основе обнаруженного значения G-датчика 10b. Блок 201 вычисления оценки уклона поверхности дороги вычисляет фактическое ускорение из среднего значения ускорения на основе датчика 19 скорости колеса и оценивает уклон поверхности дороги из отклонения обнаруженного значения G-датчика от результата вычисления. Дополнительно предусмотрен блок 202 выбора карты режима на основе оцененного уклона поверхности дороги, чтобы выбирать одну из двух карт режимов, которые должны быть описаны ниже.
Как показано на фиг. 4, блок или секция 202 выбора карты режима переключается из состояния, выбирающего карту нормального режима (фиг. 5), на карту режима, соответствующего MWSC, (фиг. 6), когда оцененный уклон равен предварительно определенному значению g2 или более. С другой стороны, в состоянии, выбирающем карту режима, соответствующего MWSC, (фиг. 6), когда оцененный уклон меньше предварительно определенного значения g1 (<g2), управление переключается на карту нормального режима (фиг. 5). Другими словами, предоставляя гистерезис относительно оцененного уклона, колебание управления будет подавляться при переключении карты.
Карта нормального режима выбирается, когда оцененный уклон меньше предварительно определенного значения g1, и, как показано на фиг. 5, на карте, предоставлены EV-режим приведения в движение, WSC-режим приведения в движение и HEV-режим. В зависимости от открытия APO акселератора и скорости VSP транспортного средства вычисляется целевой режим. Однако даже если выбирается EV-режим приведения в движение, когда SOC аккумулятора равно или меньше предварительно определенного значения, "HEV-режим приведения в движение" принудительно задается в качестве целевого режима. На карте нормального режима, показанной на фиг. 5, линия переключения HEV → WSC задается в области, более низкой, чем нижняя предельная скорость VSP1 транспортного средства, представляющая скорость вращения, меньшую, чем скорость холостого хода двигателя E, в области меньшего, чем предварительно определенное, открытия APO1 акселератора с автоматической коробкой передач, находящейся в диапазоне первой скорости.
Дополнительно, в области открытия акселератора, равного или большего, чем предварительно определенное открытие APO1 акселератора, поскольку требуется большая движущая сила, WSC-режим приведения в движение задается до тех пор, пока скорость VSP1' транспортного средства не будет выше, чем нижняя предельная скорость VSP1 транспортного средства. Кстати говоря, когда SOC аккумулятора является низким, и EV-режим приведения в движение не может выполняться, система сконфигурирована, чтобы выбирать WSC-режим приведения в движение даже при запуске или т.п. Когда открытие APO акселератора является большим, иногда трудно достигать требуемого крутящего момента посредством крутящего момента двигателя от двигателя, который вращается почти со скоростью вращения холостого хода, и крутящего момента от электромотора-генератора MG. Здесь крутящий момент двигателя может увеличиваться, чтобы выводить больший крутящий момент, если скорость двигателя увеличивается. С этой точки зрения, при выводе большего крутящего момента посредством увеличения скорости вращения двигателя, даже если WSC-режим приведения в движение выполняется при скорости транспортного средства, более высокой, чем нижняя предельная скорость VSP1 транспортного средства, переключение от WSC-режима приведения в движение к HEV-режиму приведения в движение может быть выполнено в короткое время. Эта ситуация соответствует WSC-области, которая протягивается вплоть до нижней предельной скорости VSP1' транспортного средства, показанной на фиг. 5.
Карта режима, соответствующего MWSC, имеет первый график, показанный на фиг. 6A, второй график, показанный на фиг. 6B, и третий график, показанный на фиг. 6C.
Как показано на фиг. 6A, на карте, первый график имеет WSC-режим приведения в движение, MWSC-режим приведения в движение, MWSC+CL1-режим приведения в движение с управлением проскальзыванием и HEV-режим для целевого режима, который должен быть вычислен на основе открытия APO акселератора и скорости VSP транспортного средства.
Как показано на фиг. 6B, на карте, второй график имеет MWSC-режим приведения в движение, MWSC+CL1-режим приведения в движение с управлением проскальзыванием и HEV-режим приведения в движение для целевого режима, который должен быть выбран на основе открытия APO акселератора и скорости VSP транспортного средства.
Как показано на фиг. 6C, на карте, третий график имеет WSC-режим приведения в движение, EV-режим. MWSC+CL1-режим приведения в движение с управлением проскальзыванием и HEV-режим приведения в движение для целевого режима должен выбираться на основе открытия APO акселератора и скорости VSP транспортного средства.
Эти первый-третий графики могут выбираться в зависимости от состояний первой муфты CL1, второй муфты CL2 или электромотора-генератора MG для каждой модели транспортного средства. Альтернативно, по меньшей мере, два из первого-третьего графиков могут быть выборочно использованы в одном гибридном транспортном средстве.
Секция 300 вычисления целевого заряда-разряда использует карту целевой величины заряда-разряда, чтобы вычислять целевую зарядно-разрядную мощность tP от аккумулятора C.
Блок 400 команды рабочей точки вычисляет переходный целевой крутящий момент двигателя, целевой крутящий момент электромотора-генератора, целевой максимальный запас по передаваемому крутящему моменту второй муфты, целевое передаточное число автоматической коробки AT передач и команду тока соленоида первой муфты в качестве рабочей точки, достигающей цели на основе открытия APO акселератора, целевого крутящего момента tFoO приведения в движение, целевого режима, скорости VSP транспортного средства и целевой зарядно-разрядной мощности tP. Блок 400 команды рабочей точки снабжен блоком управления запуском двигателя, чтобы предоставлять возможность запуска двигателя, когда управление переходит из EV-режима приведения в движение в HEV-режим приведения в движение.
Блок 500 управления изменением скорости и приводит в действие, и управляет соленоидным клапаном в автоматической коробке AT передач по предварительно определенному графику переключения с тем, чтобы достигать целевого максимального крутящего момента передачи второй муфты и целевого изменения передаточного числа. Отметим, что карта переключений является картой, в которой целевое положение передачи задается заранее на основе открытия APO акселератора и скорости VSP транспортного средства.
Конфигурация управления переключением режимов приведения в движение
Фиг. 7 является блок-схемой последовательности операций, показывающей последовательность операций процесса управления переключением режимов приведения в движение, выполняемого объединенным контроллером 10 в первом варианте осуществления. Далее в данном документе, со ссылкой на фиг. 7, будет описан каждый этап, представляющий конфигурацию управления переключением режимов приведения в движение.
На этапе S1 определяется, выбрана или нет карта нормального режима. Процесс переходит к этапу S2, когда ответ - "да" (выбор карты нормального режима), тогда как процесс переходит к этапу S11, когда ответ - "нет" (выбор карты режима, соответствующего MWSC).
На этапе S2, следом за положительным определением на этапе S1, определяется, больше или нет оцененный уклон, чем предварительно определенное значение g2, т.е. является ли большой или нет нагрузка на систему передачи движущей силы. Процесс переходит к этапу S3, если ответ - "да" (оцененный уклон > g2), и программа переходит к этапу S17, когда ответ - "нет" (оцененный уклон ≤ g2), и выполняет процесс управления на основе карты нормального режима.
На этапе S3, следом за положительным определением на этапе S2, выполняется переключение на карту режима, соответствующего MWSC, с карты нормального режима, и процесс переходит к этапу S4.
На этапе S4, следом за переключением карты режима на этапе S3 или отрицательным определением на этапе S13, рабочая точка, определенная по текущему открытию APO акселератора и скорости VSP транспортного средства, находится в MWSC-режиме приведения в движение. Процесс переходит к этапу S5, когда ответ - "да" (область MWSC-режима приведения в движение), тогда как процесс переходит к этапу S8, когда ответ - "нет" (за пределами области MWSC-режима приведения в движение).
На этапе S5, следующем за положительным определением на этапе S4, определяется, больше ли SOC аккумулятора предварительно определенного значения A. Процесс переходит к этапу S6, когда ответ - "да" (SOC аккумулятора > A), и процесс переходит к этапу S11, когда ответ - "нет" (SOC аккумулятора ≤ A).
Отметим, что предварительно определенное значение A представляет порог для определения того, возможно или нет обеспечивать движущую силу только посредством электромотора-генератора MG. Движущая сила может обеспечиваться только посредством электромотора-генератора MG, когда SOC аккумулятора больше предварительно определенного значения A, тогда как требуется заряд аккумулятора 4, когда SOC равно предварительно определенному значению A или ниже. Таким образом, выбор MWSC-режима приведения в движение будет запрещен.
На этапе S6, следом за положительным определением на этапе S5, определяется, меньше или нет максимальный запас TCL2 по крутящему моменту передачи второй муфты CL2, чем предварительно определенное значение B. Когда ответ - "да" (TCL2<B), процесс переходит к этапу S7, а когда - "нет" (TCL2≥B), процесс переходит к этапу S11.
Отметим, что предварительно определенное значение B представляет предварительно определенное значение, указывающее, что избыточный ток не протекает к электромотору-генератору MG. Поскольку электромотор-генератор MG управляется по скорости вращения, сформированный посредством электромотора-генератора MG крутящий момент превышает нагрузку системы передачи движущей силы, действующей на электромотор-генератор MG.
Другими словами, поскольку электромотор-генератор MG управляется по скорости вращения с тем, чтобы предоставлять возможность второй муфте быть в проскальзывающем состоянии, электромотор-генератор MG создает крутящий момент, больший, чем максимальный запас TCL2 по крутящему моменту передачи второй муфты. Таким образом, при максимальном крутящем моменте TCL2 передачи второй муфты CL2 ток через электромотор-генератор MG будет избыточным, что, тем самым, ухудшает продолжительность службы переключающего элемента и т.п. Чтобы избегать такой ситуации, при превышении предварительно определенного значения B, переключение в MWSC-режим приведения в движение будет запрещено.
На этапе S7, следом за положительным определением на этапе S6, устройство управления выполняет процесс MWSC-управления, и процесс переходит к блоку "Возврат".
В частности, в процессе MWSC-управления первая муфта CL1 расцепляется с двигателем, поддерживаемым в рабочем состоянии, и двигатель E управляется, чтобы получать скорость вращения холостого хода. Дополнительно, электромотор-генератор MG управляется по обратной связи, чтобы достигать целевой скорости вращения (однако, с более низким значением, чем скорость холостого хода), в то время как вторая муфта CL2 управляется по обратной связи, чтобы предполагать максимальный запас по передаваемому крутящему моменту, соответствующий целевому крутящему моменту приведения в движение. Отметим, что поскольку MWSC-режим приведения в движение не предусмотрен в карте нормального режима, процесс MWSC-управления на этапе S7 включает в себя процесс переключения режимов из WSC-режима приведения в движение и режима выработки на холостом ходу.
На этапе S8, следом за отрицательным определением на этапе S4, рабочая точка, определенная посредством текущего открытия APO акселератора и скорости VSP транспортного средства, находится в диапазоне или области MWSC+CL1-режима приведения в движение с управлением проскальзыванием, когда ответ - "да" (в области MWSC+CL1-режима приведения в движение с управлением проскальзыванием), процесс переходит к этапу S9, в то время как, когда ответ - "нет" (за пределами области MWSC+CL1-режима приведения в движение с управлением проскальзыванием), управление переходит к этапу S10.
На этапе S9, следующем за положительным определением на этапе S8, устройство управления выполняет процесс MWSC+CL1-управления с проскальзыванием, и процесс переходит к блоку "Возврат".
В процессе MWSC+CL1-управления c проскальзыванием, в частности, целевой CL1-крутящий момент первой муфты CL1 задается как (целевой крутящий момент приведения в движение - α) муфта сцеплена с проскальзыванием с тем, чтобы двигатель E управлялся по обратной связи, чтобы достигать скорости вращения холостого хода. Дополнительно, электромотор-генератор MG управляется по обратной связи, чтобы допускать целевую скорость вращения (однако, с более низким значением, чем скорость вращения холостого хода), которая получается посредством добавления к скорости Ncl2out вращения на выходной стороне второй муфты CL2 предварительно определенной скорости β', в то время как вторая муфта CL2 управляется по обратной связи, чтобы допускать максимальный запас по передаваемому крутящему моменту, соответствующий целевому крутящему моменту приведения в движение. Отметим, что предварительно определенная скорость β' вращения (= величине проскальзывания муфты CL2) будет установлена, чтобы предполагать более низкую скорость вращения, когда формирование тепла второй муфты CL2 является более высоким.
На этапе S10, следующем за отрицательным определением на этапе S8, определяется, находится или нет рабочая точка, определяемая в зависимости от текущего открытия APO акселератора и скорости VSP транспортного средства, в области WSC-режима приведения в движение. Процесс переходит к этапу S11 при ответе "да" (в области WSC-режима приведения в движение), в то время как процесс переходит к этапу S12, когда ответ - "нет" (за пределами диапазона WSC-режима приведения в движение) с определением, что система находится в диапазоне HEV-режима приведения в движение.
На этапе S11, следующем за положительным определением на этапе S10, устройство управления выполняет процесс WSC-управления, и процесс переходит к блоку "Возврат".
Более конкретно, в процессе WSC-управления, двигатель E управляется по прямой связи в соответствии с целевым крутящим моментом с полностью сцепленной первой муфтой, электромотор-генератор MG управляется по обратной связи, чтобы допускать скорость холостого хода, и вторая муфта CL2 управляется по обратной связи, чтобы допускать максимальный запас по передаваемому крутящему моменту, соответствующий целевому крутящему моменту приведения в движение. Отметим, что в карте режима, соответствующего MWSC, где EV-режим приведения в движение не предусмотрен, процесс WSC-управления на этапе S11 включает в себя процесс переключения режимов из EV-режима приведения в движение.
На этапе S12, следующем за отрицательным определением на этапе S10, устройство управления выполняет процесс HEV-управления, и процесс переходит к блоку "Возврат".
В процессе HEV-управления, в частности, и двигатель E, и электромотор-генератор MG управляются по обратной связи, чтобы допускать целевой крутящий момент приведения в движение с полностью сцепленной первой муфтой CL1, и вторая муфта CL2 полностью сцеплена. Отметим, что в карте режима, соответствующего MWSC, где EV-режим приведения в движение не предусмотрен, процесс HEV-управления на этапе S12 включает в себя процесс переключения режима из EV-режима.
На этапе S13, вслед за отрицательным определением на этапе S1, определяется, меньше или нет оцененный уклон, чем предварительно определенное значение g1. Управление переходит к этапу S14, когда ответ - "да" (когда оцененный уклон < g1), и управление переходит к этапу S4 и продолжает управление посредством карты режима, соответствующего MWSC, когда ответ - "нет" (оцененный уклон ≥ g1).
На этапе S14, следующем за положительным определением на этапе S13, выполняется переключение на карту нормального режима с карты режима, соответствующего MWSC, и процесс переходит к этапу S15.
На этапе S15, следующем за переключением карты на этапе S14, определяется, изменен ли режим приведения в движение, ассоциированный с переключением карты. Процесс переходит к этапу S16, когда ответ - "да" (с изменением режима приведения в движение или движения), процесс переходит к этапу S17, когда ответ - "нет" (режим движения не изменен).
Отметим, что когда переключение на карту нормального режима с карты режима, соответствующего MWSC, происходило бы…
На этапе S16, следующем за положительным определением на этапе S15, устройство управления выполняет процесс изменения режима приведения в движение, и процесс переходит к этапу S17.
Более конкретно, например, при переходе к WSC-режиму приведения в движение из MWSC-режима приведения в движение целевая скорость вращения электромотора-генератора MG изменяется на скорость холостого хода, и первая муфта CL1 сцепляется после синхронизации. Дополнительно, управление двигателем будет переключаться с управления по обратной связи скоростью вращения холостого хода на управление по прямой связи целевого крутящего момента двигателя.
На этапе S17, следующем за отрицательным определением на этапе S2, отрицательным определением на этапе S15 или процессом изменения режима приведения в движение на этапе S16 выполняется процесс управления на основе карты нормального режима, и процесс переходит к блоку возврата.
Далее приводится описание операций.
Операции в блоке управления для гибридного транспортного средства первого варианта осуществления разделены на разделы [Сравнение между WSC-управлением, MWSC-управлением и MWSC+CL1-управлением с проскальзыванием], [работа в WSC-режиме приведения в движение], [работа в MWSC-режиме приведения в движение] и [работа в MWSC+CL1-режиме приведения в движение с управлением проскальзыванием], и описаны отдельно.
Сравнение WSC-управления, MWSC-управления и MWSC+CL1-управления с проскальзыванием
Фиг. 8 является схематичным чертежом, иллюстрирующим рабочую точку каждого актуатора во время WSC-управления,
Фиг. 9 является схематичным чертежом, иллюстрирующим рабочую точку каждого актуатора во время MWSC-управления, и
Фиг. 10 является схематичным чертежом, иллюстрирующим рабочую точку каждого актуатора во время MWSC+CL1-управления с проскальзыванием. Далее в данном документе, со ссылкой на фиг. 8-10, описание будет приведено в сравнении с WSC-управлением, MWSC-управлением и MWSC+CL1-управлением с проскальзыванием.
Как показано на фиг. 8, при "WSC-управлении", двигатель E управляется по прямой связи в соответствии с целевым крутящим моментом двигателя с полностью сцепленной первой муфтой CL1, а электромотор-генератор MG управляется по обратной связи, чтобы получать скорость вращения холостого хода. Кроме того, вторая муфта CL2 управляется по обратной связи в сцеплении с проскальзыванием с тем, чтобы иметь максимальный запас по передаваемому крутящему моменту, соответствующий целевому крутящему моменту приведения в движение.
При "MWSC-управлении", как показано на фиг. 9, первая муфта CL1 расцеплена с работающим двигателем, и двигатель E управляется по обратной связи, чтобы получать скорость вращения холостого хода. Кроме того, электромотор-генератор MG управляется по обратной связи, чтобы достигать целевой скорости вращения, полученной путем прибавления к скорости Nct2out вращения на выходной стороне второй муфты CL2 предварительно определенной скорости β вращения (однако, более низкой, чем скорость холостого хода). Дополнительно, вторая муфта CL2 управляется по обратной связи посредством сцепления с проскальзыванием с тем, чтобы получать максимальный запас по передаваемому крутящему моменту, соответствующий целевому крутящему моменту приведения в движение.
В "MWSC+CL1-управлении с проскальзыванием", как показано на фиг. 10, первая муфта CL1 сцеплена с проскальзыванием, чтобы достигать целевого крутящего момента муфты CL1, который должен быть равен (целевой крутящий момент приведения в движение - α), а двигатель E управляется по обратной связи, чтобы получать скорость вращения холостого хода. Кроме того, электромотор-генератор MG управляется по обратной связи, чтобы достигать целевой скорости вращения, полученной путем прибавления к скорости Nct2out вращения на выходной стороне второй муфты CL2 предварительно определенной скорости β' вращения (однако, более низкой, чем скорость холостого хода). Дополнительно, вторая муфта CL2 управляется по обратной связи, чтобы допускать максимальный запас по передаваемому крутящему моменту, соответствующий целевому крутящему моменту приведения в движение в условиях сцепления с проскальзыванием. Отметим, что предварительно определенная скорость β' вращения (= величине проскальзывания CL2) задается в более низкую скорость вращения, когда температура муфты CL2 более высокая.
WSC-режим приведения в движение при "WSC-управлении" характеризуется тем, что двигатель E остается работающим, а первая муфта CL1 полностью сцеплена. В WSC-режиме приведения в движение, разница между скоростью вращения ведущего колеса и скоростью вращения двигателя поглощается посредством проскальзывания второй муфты CL2. Дополнительно, поскольку на изменение в целевом крутящем моменте приведения в движение может быть реакция посредством изменения в максимальном крутящем моменте второй муфты CL2, чувствительность относительно изменения целевого крутящего момента приведения в движение является высокой. Кроме того, когда вторая муфта CL2 помещается под управление с проскальзыванием, чтобы получать максимальный запас по передаваемому крутящему моменту в соответствии с целевым крутящим моментом приведения в движение, транспортное средство движется вперед посредством движущей силы с помощью двигателя E и/или электромотора-генератора MG.
MWSC-режим приведения в движение посредством "MWSC-управления" характеризуется тем, что расцепляется первая муфта CL1, которая полностью сцеплена в WSC-режиме приведения в движение. В MWSC-режиме приведения в движение, без привязки к скорости холостого хода двигателя E, возможно управлять величиной проскальзывания посредством управления скоростью вращения электромотора-генератора MG, по сравнению с WSC-режимом приведения в движение, величина проскальзывания второй муфты CL2 (=β) может быть уменьшена. Тогда, вторая муфта CL2 переходит под управление с проскальзыванием, заставляя максимальный запас по передаваемому крутящему моменту приспосабливаться согласно целевому крутящему моменту приведения в движение, и транспортное средство движется с помощью движущей силы электромотора-генератора MG.
MWSC+CL1-режим приведения в движение с управлением проскальзыванием посредством "MWSC+CL1-управления с проскальзыванием" характеризуется сцеплением с проскальзыванием первой муфты CL1, которая расцеплена в MWSC-режиме приведения в движение. В MWSC+CL1-режиме приведения в движение с управлением проскальзыванием возможно уменьшать величину проскальзывания второй муфты CL2 (=β′) как в MWSC-режиме приведения в движение. Дополнительно, поскольку максимальный запас по передаваемому крутящему моменту первой муфты CL1 применяется в качестве крутящего момента приведения в движение, возможно уменьшать крутящий момент электромотора для электромотора-генератора MG. Затем управление с проскальзыванием выполняется, чтобы заставлять вторую муфту CL2 допускать максимальный запас по передаваемому крутящему моменту согласно целевому крутящему моменту приведения в движение, и транспортное средство движется с помощью движущей силы двигателя E и электромотора-генератора MG (первый вариант осуществления 1). Альтернативно, транспортное средство движется с помощью движущей силы двигателя E (второй вариант осуществления). Или транспортное средство движется с помощью движущей силы двигателя E (третий и четвертый варианты осуществления).
Работа в WSC-режиме приведения в движение
Сейчас будет приведено объяснение причины для предоставления области WSC-режима приведения в движение. Согласно гибридному транспортному средству в первом варианте осуществления, вследствие отсутствия элемента, такого как преобразователь крутящего момента, для поглощения разности вращения, если первая муфта CL1 и вторая муфта CL2 будут полностью сцеплены, скорость транспортного средства определяется согласно скорости вращения двигателя E. Двигатель E имеет нижнее предельное значение как скорость холостого хода, чтобы гарантировать автономное или независимое вращение, и нижний предел дополнительно увеличивается, когда работа на холостом ходу уместна для операции прогрева двигателя. Дополнительно, может быть случай, в котором переход в HEV-режим приведения в движение быстро не будет обеспечен с высоким целевым крутящим моментом приведения в движение.
С другой стороны, в EV-режиме приведения в движение для того, чтобы расцеплять первую муфту CL1, не существует ограничения, ассоциированного с нижним предельным значением согласно скорости вращения двигателя. Однако нет другого варианта, но заставлять двигатель производить устойчивый крутящий момент при движении в EV-режиме приведения в движение трудно посредством ограничения на основе SOC аккумулятора, или в области, в которой целевой крутящий момент приведения в движение не может быть достигнут посредством только электромотора-генератора MG.
Следовательно, в более низкой области в скорости транспортного средства, соответствующей нижнему предельному значению, и когда движение в EV-режиме приведения в движение затруднено, или целевой крутящий момент приведения в движение не достигается только посредством электромотора-генератора MG, будет выбран WSC-режим приведения в движение, в котором скорость вращения двигателя поддерживается на нижней предельной скорости с помощью второй муфты CL2 под управлением с проскальзыванием, чтобы двигаться с помощью крутящего момента двигателя.
В первом варианте осуществления, когда выбрана карта нормального режима и когда оцененный уклон равен g2 или ниже, на блок-схеме последовательности операций на фиг. 7, последовательность операций, проходящая по цепочке "этап S1 → этап S2 → этап S17 → возврат", повторяется. Затем на этапе S17, когда рабочая точка согласно текущему открытию APO акселератора и скорости VSP транспортного средства находится в области WSC-режима приведения в движение, выбирается WSC-режим приведения в движение.
Дополнительно, когда выбрана карта нормального режима, и оцененный уклон больше g2, в блок-схеме последовательности операций на фиг. 7, процесс переходит по цепочке "этап S1 → этап S2 → этап S3", и, на этапе S3, карта нормального режима переключается на соответствующий MWSC режим. Поэтому когда рабочая точка, определенная посредством текущего открытия APO акселератора и скорости VSP транспортного средства, находится в области WSC-режима приведения в движение, процесс переходит от этапа S3 по цепочке "этап S4 → этап S8 → этап S10 → этап S11 → возврат", и выбирается WSC-режим приведения в движение посредством процесса WSC-управления.
С другой стороны, когда, даже если рабочая точка на основе текущего открытия педали акселератора и скорости транспортного средства находится в области MWSC-режима приведения в движение, но когда условие на этапе S5 и этапе S6 не удовлетворяется, процесс переходит от этапа S3 по цепочке "этап S4 → этап S5 (→ этап S6) → этап S11 → возврат", и выбирается WSC-режим приведения в движение посредством процесса WSC-управления.
Поэтому когда WSC-режим приведения в движение выбирается на горизонтальной дороге при начале движения или т.п., возможно получать следующие преимущества.
(a) Вторая муфта CL2 выступает для того, чтобы функционировать в качестве элемента, чтобы поглощать разницу вращения между скоростью вращения ведущего колеса и скоростью вращения двигателя с тем, чтобы иметь возможность поглощения разности вращения посредством проскальзывания второй муфты CL2.
(b) Поскольку вторая муфта CL2 задается так, чтобы допускать максимальный запас по передаваемому крутящему моменту согласно целевому крутящему моменту приведения в движение, возможно выполнять начало движения транспортного средства посредством передачи ведущему колесу крутящего момента приведения в движение, которого требует водитель.
(c) Поскольку возможно, относительно изменения целевого крутящего момента приведения в движение вследствие изменения в скорости VSP транспортного средства или изменений в открытии APO акселератора, без ожидания изменения движущей силы от двигателя E, реагировать посредством изменения максимального крутящего момента передачи второй муфты CL2, чувствительность к изменению целевого крутящего момента приведения в движение является высокой.
Работа в MWSC-режиме приведения в движение
Сначала приводится описание причины предоставления области MWSC-режима приведения в движение. Когда оцененный уклон по поверхности дороги для движения больше предварительно определенного уклона (g2 или g1), например, и при попытке поддержания в состоянии низкой начальной скорости движения или в остановленном состоянии транспортного средства без выполнения управления педалью тормоза, требуется большая движущая сила по сравнению с горизонтальной дорогой. Поэтому существует необходимость противодействовать соответствующей уклону нагрузке, действующей на транспортное средство.
С точки зрения недопущения формирования тепла, вызванного проскальзыванием второй муфты CL2, когда существует возможность или запас по SOC аккумулятора, выбор EV-режима приведения в движение является альтернативным вариантом. В это время, при переходе из области EV-режима приведения в движение в область WSC-режима приведения в движение, необходимо выполнять запуск двигателя. Таким образом, электромотор-генератор будет формировать крутящий момент приведения в движение, в то же время обеспечивая крутящий момент для запуска двигателя, верхний предел по крутящему моменту приведения в движение будет чрезмерно сужен.
Кроме того, в EV-режиме приведения в движение, при удержании электромотора-генератора MG остановленным или вращающимся с очень низкой скоростью с выводом электромотору-генератору MG лишь крутящего момента, ток блокировки (явление, когда ток продолжает протекать в одном элементе) протекает к переключающему элементу инвертора, что может приводить к ухудшению продолжительности службы.
Дополнительно, в области, более низкой, чем нижняя предельная скорость VSP1 транспортного средства, которая соответствует скорости холостого хода двигателя E при первом передаточном числе (далее в данном документе VSP2 на фиг. 6), вращение самого двигателя E не может быть снижено ниже скорости холостого хода. В это время, при выборе WSC-режима приведения в движение, величина проскальзывания второй муфты CL2 увеличивается, что может неблагоприятно влиять на продолжительность службы второй муфты CL2.
В частности, на поднимающейся по склону дороге, поскольку по сравнению с горизонтальной дорогой требуется большая движущая сила, максимальный запас по передаваемому крутящему моменту, требуемый от второй муфты CL2, является более высоким, и состояние, в котором высокая величина проскальзывания продолжается при высоком крутящем моменте, может легко приводить в результате к сокращенной продолжительности службы второй муфты CL2. Дополнительно, поскольку увеличение скорости транспортного средства также медленное, существует вероятность, что потребуется время до перехода в HEV-режим приведения в движение, что подразумевает возможность дополнительного формирования тепла.
Следовательно, при работающем двигателе E MWSC-режим приведения в движение подготавливается к расцеплению первой муфты CL1, в то же время управляя максимальным запасом по передаваемому крутящему моменту второй муфты CL2, чтобы соответствовать целевому крутящему моменту от водителя, и управлению по обратной связи скоростью вращения электромотора-генератора MG, чтобы допускать целевую скорость вращения выше на предварительно определенную скорость вращения, чем выходная скорость вращения второй муфты CL2.
Другими словами, управление предназначается, чтобы управлять с проскальзыванием второй муфтой CL2, в то же время удерживая состояние вращения электромотора-генератора MG ниже скорости холостого хода двигателя. В то же время, двигатель E переключается на управление по обратной связи, в котором скорость холостого хода задается в качестве целевой скорости вращения. В WSC-режиме приведения в движение скорость двигателя поддерживается посредством управления по обратной связи скоростью вращения электромотора-генератора MG. В отличие от этого, после того как первая муфта CL1 расцепляется, скорость вращения двигателя не будет иметь возможности управляться до скорости холостого хода посредством электромотора-генератора MG. Поэтому управление по обратной связи скоростью двигателя выполняется самим двигателем E.
В первом варианте осуществления, когда выбрана карта нормального режима и оцененный уклон больше g2, в блок-схеме последовательности операций на фиг. 7, процесс переходит по цепочке "этап S1 → этап S2 → этап S3", и на этапе S3 карта нормального режима переключается на карту режима, соответствующего MWSC. Поэтому когда рабочая точка согласно текущему открытию APO акселератора и скорости VSP транспортного средства находится в области MWSC-режима приведения в движение, и когда как состояние SOC аккумулятора, так и условие крутящего момента второй муфты удовлетворяются, процесс переходит от этапа S3 по цепочке "этап S4 → этап S5 → этап S6 → этап S7". На этапе S7 выбирается MWSC-режим приведения в движение согласно процессу MWSC-управления. Затем, в блок-схеме на фиг. 7, последовательность операций, переходящая по цепочке "этап S1 → этап S13 → этап S4 → этап S5 → этап S6 → этап S7 → возврат", повторяется, пока оцененный уклон равен g1 или более, и выбор MWSC-режима приведения в движение посредством процесса MWSC-управления сохраняется.
Следовательно, когда MWSC-режим приведения в движение выбирается на подъеме при начале движения или т.п., возможно получать преимущества, описанные ниже.
(a) Не нужно оставлять крутящий момент приведения в движение для запуска двигателя с помощью электромотора-генератора MG, поскольку двигатель E находится в рабочем состоянии, что увеличивает верхний предел по крутящему моменту приведения в движение электромотора-генератора MG. В частности, при просмотре относительно оси целевого крутящего момента приведения в движение, область может соответствовать более высокому целевому крутящему моменту, чем в области EV-режима приведения в движение.
(b) Возможно улучшать продолжительность службы переключающего элемента и т.п., обеспечивая состояние вращения электромотора-генератора MG.
(c) Поскольку электромотору-генератору MG предоставлена возможность вращаться с более низкой скоростью вращения, чем скорость холостого хода, возможно уменьшать величину проскальзывания второй муфты CL2 и улучшать продолжительность службы второй муфты CL2 (управление с защитой CL2).
Работа в MWSC+CL1-режиме приведения в движение с управлением проскальзыванием
Приводится пояснение причины предоставления области MWSC+CL1-режима приведения в движение с управлением проскальзыванием. MWSC-режим приведения в движение выполняется, чтобы снижать скорость вращения при проскальзывании второй муфты CL2 с помощью электромотора-генератора MG. Следовательно, если существует ограничение выходной мощности электромотора-генератора MG или ограничение выходной мощности аккумулятора 4, невозможно применять MWSC-режим приведения в движение.
Поэтому в ограниченное время недоступности MWSC-режима приведения в движение, например, допускается режим движения, в котором вторая муфта CL2 полностью сцеплена, в то же время предоставляя возможность управления с проскальзыванием при начале движения посредством первой муфты CL1. В случае этого режима приведения в движение, вследствие возросшей величины проскальзывания первой муфты CL1, существуют воздействия на продолжительность службы первой муфты CL1. Более того, вследствие полностью сцепленного состояния второй муфты CL2 возникает скачок при повторном входе второй муфты CL2 в проскальзывающее состояние. Кроме того, при выполнении выработки энергии необходимо осуществлять балансировку относительно крутящего момента первой муфты.
Поэтому когда крутящий момент электромотора от электромотора-генератора MG не может обеспечивать требуемый водителем крутящий момент приведения в движение (= целевому крутящему моменту приведения в движение), невозможно поддерживать MWSC-режим приведения в движение. Соответственно, будет принудительно выбираться WSC-режим приведения в движение, и при начале движения на восходящем уклоне или т.п. скорость вращения с проскальзыванием второй муфты CL2 увеличивается (полное сцепление первой муфты CL1), и на продолжительность службы второй муфты CL2 оказывается неблагоприятное влияние.
Т.е. когда невозможно за счет крутящего момента электромотора обеспечивать требуемый водителем крутящий момент (= целевому крутящему моменту приведения в движение), так что MWSC-режим приведения в движение не может поддерживаться, требуется режим приведения в движение, заменяющий MWSC-режим приведения в движение. В это время выбирается MWSC+CL1-режим приведения в движение с управлением проскальзыванием.
В первом варианте осуществления, когда выбирается карта нормального режима, и оцененный уклон больше g2, в блок-схеме последовательности операций на фиг. 7, процесс переходит по цепочке "этап S1 → этап S2 → этап S3", и на этапе S3 карта нормального режима переключается на карту режима, соответствующего MWSC. Поэтому когда рабочая точка, определенная посредством открытия APO педали акселератора и скорости VSP транспортного средства, находится в области режима MWSC+CL1-управления с проскальзыванием, процесс переходит от этапа S3 по цепочке "этап S4 → этап S8 → этап S9", и на этапе S9 выбирается MWSC+CL1-режим приведения в движение с управлением проскальзыванием посредством MWSC+CL1-управления с проскальзыванием. Затем пока оцененный уклон равен g1 или больше, в блок-схеме последовательности операций на фиг. 7, последовательность операций, переходящих по цепочке "этап S1 → этап S13 → этап S4 → этап S8 → этап S9 → возврат", повторяется. Затем выбор MWSC+CL1-режима приведения в движение с управлением проскальзыванием посредством процесса MWSC+CL1-управления с проскальзыванием сохраняется.
Теперь приводится описание причины уменьшения крутящего момента электромотора после выбора MWSC+CL1-режима приведения в движение с управлением проскальзыванием со ссылкой на фиг. 8-10.
Уравнение движения вокруг оси двигателя выражено следующим образом:
Teng-Tcl1=Ieng*dωeng... (1)
Уравнение движения вокруг вала электромотора представлено следующим образом:
Tmg+Tcl1-Tcl2=Img*dωmg... (2)
При этом
Teng: крутящий момент двигателя;
Tmg: крутящий момент электромотора;
Tcl1: максимальный запас по крутящему моменту муфты CL1;
Tcl2: максимальный запас по крутящему моменту муфты CL2;
Ieng: инерция двигателя;
Img: инерция электромотора;
dωeng: угловое ускорение вращения двигателя;
dωmg: угловое ускорение вращения электромотора.
В случае MWSC-режима, поскольку Tcl1=0, уравнение (1) может быть выражено следующим образом:
Teng=Ieng*dωeng... (1-1)
Вышеописанная формула (2) может быть выражена следующим образом:
Tmg-Tcl2=Img*dωmg... (2-1)
Поэтому когда выбирается MWSC-режим, как может быть видно из уравнения (2-1), необходимо, чтобы крутящий момент Tmg электромотора был достаточным, чтобы противодействовать максимальному запасу Tcl2 по крутящему моменту муфты CL2.
В отличие от этого, в случае MWSC+CL1-режима приведения в движение с управлением проскальзыванием, поскольку Tcl1>0, как может быть видно из уравнения (2), максимальному запасу Tcl2 по крутящему моменту муфты CL2 противопоставляется крутящий момент, который равен сумме максимального запаса Tcl1 по крутящему моменту муфты CL1 и крутящего момента Tmg электромотора. Поэтому возможно уменьшать крутящий момент Tmg электромотора на величину максимального запаса Tcl1 по крутящему моменту муфты CL1 (>0).
В случае первого варианта осуществления, поскольку целевой крутящий момент CL1 получается посредством целевого крутящего момента приведения в движение (= максимальный запас TCL2 по крутящему моменту муфты CL2 - α), вышеупомянутое уравнение (2) теперь может быть выражено следующим образом:
Tmg-α=Img*dωmg... (2-2)
Поскольку Tcl2>α, как может быть видно из уравнения (2-2), описанного выше, достаточно предоставлять крутящий момент Tmg электромотора, который может конкурировать с α (<Tcl2).
Фиг. 11 является временной диаграммой в первом варианте осуществления, где целевой крутящий момент CL1 задается как равный (целевой крутящий момент приведения в движение - α) с балансировкой на уклоне при постоянном открытии акселератора. Другими словами, движение посредством выбора MWSC+CL1-режима приведения в движение с управлением проскальзыванием становится движением с помощью части крутящего момента двигателя и уменьшенного крутящего момента электромотора, как показано на фиг. 11, крутящий момент электромотора в течение времени MWSC+CL1-управления с проскальзыванием представлено уменьшением ΔTmg1 относительно крутящего момента электромотора во время MWSC-управления, как показано на фиг. 11. Формулируя иначе, даже если выходная мощность электромотора-генератора MG и выходная мощность аккумулятора 4 ограничены, когда α (<Tcl2) может быть обеспечена в качестве крутящего момента электромотора, MWSC+CL1-режим приведения в движение с управлением проскальзыванием может выбираться.
Дополнительно, условие открытия акселератора для перехода в MWSC+CL1-режим приведения в движение с управлением проскальзыванием определяется, как показано на фиг. 6A, 6B, как верхнее предельное значение APO1 или более, при котором MWSC-режим приведения в движение выбирается.
Таким образом, выбирая MWSC-режим приведения в движение, пока электромотор-генератор MG может использоваться, по сравнению с тем, когда изменение или переключение режима происходило бы в MWSC+CL1-режим приведения в движение с управлением проскальзыванием, пока электромотор-генератор MG может быть использован, нагрузка на первую муфту CL1 уменьшается.
Кроме того, величина β' проскальзывания второй муфты CL2 в MWSC+CL1-режиме приведения в движение с управлением проскальзыванием задается ниже, когда теплотворность второй муфты CL2 при переключении режима из MWSC-режима приведения в движение является более высокой.
Т.е. в MWSC+CL1-режиме приведения в движение с управлением проскальзыванием, как показано на фиг. 10, различие скорости вращения между двигателем E (скорость вращения холостого хода) и транспортным средством будет разделяться посредством величины γ проскальзывания муфты CL1 и величины β' проскальзывания муфты CL2. Поэтому когда выбор MWSC-режима приведения в движение продолжается, при переключении режима в MWSC+CL1-режим приведения в движение с управлением проскальзыванием нагрузка на вторую муфту CL2 будет уменьшаться.
Поэтому когда выбирается MWSC+CL1-режим приведения в движение с управлением проскальзыванием в начале движения вверх по склону или т.п., возможно получать следующие преимущества.
(a) Когда выбирается MWSC+CL1-режим приведения в движение с управлением проскальзыванием, вследствие проскальзывания первой муфты CL1, крутящий момент электромотора для электромотора-генератора MG уменьшается. В результате, возможно уменьшать потребление энергии и увеличивать продолжительность службы электромотора-генератора MG.
(b) Выбирая MWSC+CL1-режим приведения в движение с управлением проскальзыванием при предельной степени APO1 открытия акселератора или более, когда выбран MWSC-режим приведения в движение, выбор MWSC-режима приведения в движение сохраняется, пока электромотор-генератор MG может использоваться. В результате, нагрузка на первую муфту CL1 вследствие продленного выбора MWSC+CL1-режима приведения в движение с управлением проскальзыванием в течение длительного периода времени может быть уменьшена.
(c) Величина β′ проскальзывания второй муфты CL2 в MWSC+CL1-режиме приведения в движение с управлением проскальзыванием определяется посредством количества тепла, сформированного второй муфтой CL2 при переключении режима из MWSC-режима приведения в движение. В результате, после переключения режима на MWSC+CL1-режим приведения в движение с управлением проскальзыванием, возможно уменьшать нагрузку второй муфты CL2 (управление защитой муфты CL2).
(d) Целевой крутящий момент CL1 в MWSC+CL1-режиме приведения в движение с управлением проскальзыванием задается как целевой крутящий момент приведения в движение - α.
Поэтому вследствие использования части крутящего момента двигателя, возможно безусловно уменьшать крутящий момент электромотора от электромотора-генератора MG, так что величина уменьшения крутящего момента электромотора может регулироваться.
Теперь приводится описание результатов.
В устройстве управления для гибридного транспортного средства первого варианта осуществления возможно получать следующие результаты.
(1) Предоставляются двигатель E;
электромотор (электромотор-генератор MG), работающий для вывода движущей силы транспортного средства и выполнения запуска двигателя E;
первый элемент сцепления (первая муфта CL1), вставленный между двигателем E и электромотором (электромотором-генератором MG) для выборочного соединения и отсоединения двигателя E и электромотора (электромотора-генератора MG);
второй элемент сцепления (вторая муфта CL2), вставленный между электромотором (электромотором-генератором MG) и ведущим колесом (левым и правым задними колесами RL, RR) для выборочного сцепления и расцепления электромотора (электромотора-генератора MG) и ведущего колеса (левого и правого задних колес RL, RR);
устройство определения нагрузки передачи движущей силы (блок 201 вычисления оценки уклона поверхности дороги) для определения или оценки нагрузки системы передачи движущей силы; и
блок управления приведением в движение с проскальзыванием двигателя/электромотора (этап S9 на фиг. 7) для сцепления с проскальзыванием первого элемента сцепления (первой муфты CL1) с двигателем E, поддерживаемым в состоянии вращения с предварительно определенной скоростью вращения, в то же время для сцепления с проскальзыванием второго элемента сцепления (второй муфты CL2) с электромотором (электромотором-генератором MG) со скоростью вращения, более низкой, чем предварительно определенная скорость вращения.
Поэтому возможно уменьшать крутящий момент электромотора во время управления приведением в движение с проскальзыванием электромотора, которое должно выполняться, когда нагрузка системы передачи движущей силы является высокой.
(2) Предоставляется блок управления приведением в движение с проскальзыванием электромотора (этап S7 на фиг. 7), который работает, когда нагрузка системы передачи движущей силы равна предварительно определенному значению или более, чтобы расцеплять первый элемент сцепления (первую муфту CL1) с двигателем E, который продолжает вращаться с предварительно определенной скоростью вращения, в то же время чтобы сцеплять с проскальзыванием второй элемент сцепления (вторую муфту CL2) с электромотором (электромотором-генератором MG), вращающимся со скоростью вращения, более низкой, чем предварительно определенная скорость вращения, при этом блок управления приведением в движение с проскальзыванием двигателя/электромотора (этап S9 на фиг. 7) сконфигурирован, чтобы задавать состояние открытия акселератора, при котором управление приведением в движение с проскальзыванием электромотора (MWSC-управление) переходит к управлению приведением в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управлению с проскальзыванием) при верхнем пределе APO1 открытия акселератора или выше, при котором блок управления приведением в движение с проскальзыванием электромотора (этап S7 на фиг. 7) выбирается (фиг. 6).
Поэтому, в дополнение к результатам (1), выбирая управление приведением в движение с проскальзыванием электромотора (MWSC-управление), пока электромотор (электромотор-генератор MG) является используемым, частота выбора управления приведением в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управление с проскальзыванием) сдерживается, так что нагрузка на первый элемент сцепления (первую муфту CL1) может быть уменьшена.
(3) Блок управления приведением в движение с проскальзыванием двигателя/электромотора (этап S9 на фиг. 7) сконфигурирован, чтобы задавать величину проскальзывания второго элемента сцепления во время управления приведением в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управления с проскальзыванием) согласно состоянию нагрева второго элемента сцепления (второй муфты CL2) в момент переключения управления от управления приведением в движение с проскальзыванием электромотора (MWSC-управления).
Поэтому, в дополнение к результатам (2), возможно уменьшать нагрузку на второй элемент сцепления (вторую муфту CL2) после переключения режима на управление приведением в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управление с проскальзыванием).
(4) Блок управления приведением в движение с проскальзыванием двигателя/электромотора (этап S9 на фиг. 7) сконфигурирован, чтобы задавать целевой крутящий момент сцепления первого элемента сцепления (первой муфты CL1) в значение крутящего момента, полученное вычитанием предварительно определенного значения α из целевого крутящего момента приведения в движение.
Поэтому, в дополнение к результатам (1)-(3), возможно надежно уменьшать крутящий момент электромотора от электромотора (электромотора-генератора MG), используя часть крутящего момента двигателя, величина уменьшения крутящего момента электромотора может регулироваться посредством регулировки настройки предварительно определенного значения α.
Второй вариант осуществления изобретения
Во втором варианте осуществления, при MWSC+CL1-управлении с проскальзыванием, целевой крутящий момент муфты CL1 задается посредством целевого крутящего момента приведения в движение.
Чтобы описывать структуру, поскольку конфигурация второго варианта осуществления является такой же, что и у первого варианта осуществления, за исключением этапа 9 на фиг. 7, специальный чертеж не показан. Таким образом, приводится описание этапа 7 во втором варианте осуществления.
На этапе S9, следом за положительным определением на этапе S8, система выполняет процесс MWSC+CL1-управления с проскальзыванием, и процесс переходит к блоку "Возврат".
В частности, в процессе MWSC+CL1-управления с проскальзыванием первая муфта CL1 сцепляется с проскальзыванием посредством задания целевого крутящего момента CL1 как целевого крутящего момента приведения в движение, двигатель E управляется по обратной связи, чтобы достигать скорости вращения холостого хода, электромотор-генератор MG управляется по обратной связи, чтобы достигать целевой скорости вращения (однако, более низкого значения, чем скорость холостого хода), полученной посредством добавления к скорости Nxl2out вращения на выходной стороне второй муфты CL2 предварительно определенной скорости β' вращения. Дополнительно, вторая муфта CL2 управляется по обратной связи, чтобы допускать максимальный запас по передаваемому крутящему моменту согласно целевому крутящему моменту приведения в движение. Отметим, что предварительно определенная скорость β' вращения (= величине проскальзывания муфты CL2) задается в более низкую скорость вращения, когда теплотворность второй муфты CL2 является более высокой.
Далее приводится описание работы второго варианта осуществления. Поскольку целевой крутящий момент муфты CL1 задается посредством целевого крутящего момента приведения в движение (= максимальному запасу Tcl2 по крутящему моменту муфты CL2), уравнение (2) выше может быть выражено следующим образом:
Tmg=Img*dωmg... (2-3)
Очевидно из уравнения (2-3), что крутящий момент Tmg электромотора может быть нулевым, т.е. Tmg=0.
Фиг. 12 является временной диаграммой в случае, в котором целевой крутящий момент муфты CL1 задается в целевой крутящий момент приведения в движение при движении в соответствии с уклоном при постоянном открытии акселератора во втором варианте осуществления. Другими словами, движение с выбранным MWSC+CL1-режимом приведения в движение с управлением проскальзыванием выполняется только с помощью части крутящего момента двигателя, и крутящий момент электромотора во время MWSC+CL1-управления с проскальзыванием уменьшается на ΔTmg2 от крутящего момента электромотора в режиме MWSC-управления. Другими словами, даже если крутящий момент Tmg электромотора не может быть обеспечен вовсе вследствие ограничения выходной мощности электромотора-генератора MG, ограничения аккумулятора 4 и т.д., возможно выбирать MWSC+CL1-режим приведения в движение с управлением проскальзыванием.
Отметим, что поскольку другие операции являются такими же, что и операции в первом варианте осуществления, точное описание опущено.
Далее описываются результаты.
В устройстве управления для гибридного транспортного средства во втором варианте осуществления, в дополнение к результатам (1)-(3), могут быть получены следующие результаты.
(5) Блок управления приведением в движение с проскальзыванием двигателя/электромотора (этап S9 на фиг. 7) сконфигурирован, чтобы задавать целевой крутящий момент сцепления первого элемента сцепления (первой муфты CL1), чтобы допускать целевой крутящий момент приведения в движение.
Поэтому даже когда выходная мощность электромотора (электромотора-генератора MG), выходная мощность аккумулятора 4 и т.д. ограничены, и крутящий момент Tmg электромотора недоступен вовсе, возможно выбирать режим приведения в движение посредством управления приведением в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управление с проскальзыванием), которое защищает второй элемент сцепления (вторую муфту CL2).
Третий вариант осуществления изобретения
В третьем варианте осуществления, при MWSC+CL1-управлении с проскальзыванием, целевой крутящий момент муфты CL1 получается как целевой крутящий момент приведения в движение + крутящий момент выработки энергии.
Чтобы описать структуру, кроме этапа S9 на фиг. 7, конфигурация третьего варианта осуществления является такой же, что и первый вариант осуществления. Поэтому специальные чертежи исключены. Ниже приведено описание этапа S9 в третьем варианте осуществления.
На этапе S9, следом за положительным определением на этапе S8, система выполняет процесс MWSC+CL1-управления с проскальзыванием, и процесс переходит к блоку "Возврат".
В процессе MWSC+CL1-управления с проскальзыванием, в частности, первая муфта CL1 сцепляется с проскальзыванием посредством задания целевого крутящего момента муфты CL1 как целевой крутящий момент приведения в движение + крутящий момент выработки энергии, поддерживая двигатель в рабочем состоянии, и двигатель E управляется по обратной связи для того, чтобы двигатель вращался со скоростью холостого хода. Дополнительно, электромотор-генератор MG управляется по обратной связи с тем, чтобы достигать целевой скорости вращения (однако, в более низком значении, чем скорость холостого хода), полученной посредством прибавления к скорости Nclout вращения на выходной стороне второй муфты CL2 предварительно определенной скорости β' вращения. Кроме того, вторая муфта CL2 управляется по обратной связи, чтобы допускать максимальный запас по передаваемому крутящему моменту согласно целевому крутящему моменту приведения в движение. Отметим, что предварительно определенная скорость β' вращения (= величине проскальзывания муфты CL2) задается в более низкую скорость вращения, когда теплотворность второй муфты CL2 увеличивается.
Далее описываются операции. В третьем варианте осуществления, поскольку целевой крутящий момент муфты CL1 получается посредством суммирования целевого крутящего момента приведения в движение (= максимальному запасу Tcl2 по крутящему моменту муфты CL2) и крутящего момента выработки энергии, вышеописанное уравнение (2) может быть выражено следующим образом:
Tmg + крутящий момент выработки = Img·dωmg... (2-4)
Как ясно из уравнения (2-4), крутящий момент Tmg электромотора становится отрицательным вследствие части крутящего момента выработки энергии.
Фиг. 13 является временной диаграммой в случае, в котором целевой крутящий момент муфты CL1 задается равным (целевой крутящий момент приведения в движение + крутящий момент выработки) в третьем варианте осуществления с балансировкой движения по уклону с постоянным открытием педали акселератора. Другими словами, движение посредством выбора MWSC+CL1-режима приведения в движение с управлением проскальзыванием представлено движением с выработкой энергии, в котором часть крутящего момента двигателя используется для крутящего момента приведения в движение для движения, а часть крутящего момента двигателя используется для крутящего момента выработки энергии. Крутящий момент электромотора во время MWSC+CL1-управления с проскальзыванием, как показано на фиг. 13, уменьшается на ΔTmg3 от крутящего момента электромотора при MWSC-управлении. Другими словами, даже когда требуется зарядка аккумулятора 4, в дополнение к полной недоступности крутящего момента Tmg электромотора вследствие ограничений на выходную мощность электромотора-генератора MG или на выходную мощность аккумулятора 4, MWSC+CL1-режим приведения в движение с управлением проскальзыванием выбирается, чтобы осуществлять движение с выработкой энергии.
Отметим, что поскольку другие операции являются такими же, что и в первом варианте осуществления, описания опущены.
Далее описываются результаты.
В устройстве управления для гибридного транспортного средства в третьем варианте осуществления, в дополнение к результатам (1)-(3), могут быть получены следующие результаты.
(6) Блок управления приведением в движение с проскальзыванием двигателя/электромотора (этап S9 на фиг. 7) сконфигурирован, чтобы задавать целевой крутящий момент сцепления первого элемента сцепления (первой муфты CL1) в значение крутящего момента, полученное посредством прибавления к целевому крутящему моменту приведения в движение крутящего момента выработки энергии.
Таким образом, когда необходима зарядка аккумулятора 4, возможно выбирать режим приведения в движение с выработкой энергии посредством управления приведением в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управления с проскальзыванием), чтобы защищать второй элемент сцепления (вторую муфту CL2).
Четвертый вариант осуществления изобретения
В четвертом варианте осуществления излагается пример, в котором MWSC+CL1-управление с проскальзыванием, при котором целевой крутящий момент муфты CL1 получается как целевой крутящий момент приведения в движение + крутящий момент выработки в третьем варианте осуществления, применяется к совместному или объединенному управлению, чтобы обеспечивать SOC аккумулятора.
Чтобы описывать конфигурацию на фиг. 7, когда определяется, что операция находится в области MWSC-режима приведения в движение на этапе S4, управление переходит к этапу S9 от этапа S5 (однако, SOC ≤ порогового значения вмешательства в управление), и выполняется процесс MWSC+CL1-управления с проскальзыванием, в котором целевой крутящий момент муфты CL1 получается как (целевой крутящий момент приведения в движение + крутящий момент выработки энергии). Затем когда SOC аккумулятора вырастает до порога отмены вмешательства вследствие выполнения MWSC+CL1-управления с проскальзыванием, управление возвращается опять к процессу MWSC-управления. Настоящий вариант осуществления, таким образом, представляет пример циклического выполнения как режима выработки энергии посредством MWSC+CL1-управления с проскальзыванием, так и MWSC-управления, с тем, чтобы выполнять циклическую операцию переключения многократно, при этом отслеживая SOC аккумулятора. Отметим, что другие конфигурации являются такими же, что и в третьем варианте осуществления.
Далее описываются операции. Фиг. 14 является временной диаграммой в случае, в котором MWSC+CL1-управление с проскальзыванием, обсужденное в третьем варианте осуществления, и целевой крутящий момент муфты CL1, который задается как (целевой крутящий момент приведения в движение + крутящий момент выработки энергии), применяются к совместному управлению для обеспечения SOC аккумулятора с балансируемым уклоном при постоянном открытии акселератора. Т.е. выполняя MWSC-управление с помощью крутящего момента электромотора, при SOC аккумулятора, равном пороговому значению вмешательства в управление или меньше, во время t1, выполняется MWSC+CL1-управление с проскальзыванием третьего варианта осуществления, и SOC аккумулятора повышается от времени t1 до времени t2. Затем когда SOC аккумулятора достигает порога отмены вмешательства во время t2, программа возвращается опять к MWSC-управлению и поддерживает MWSC-управление до времени t3, в которое SOC аккумулятора падает ниже порога вмешательства в управление. Этот циклический режим повторений повторяется между временем t3 и временем t8. Поэтому при выборе режима приведения в движение с MWSC-управлением в ситуациях, которые требуют заряда аккумулятора, применяя режим выработки энергии посредством MWSC+CL1-управления с проскальзыванием посредством цикличной операции в качестве управления вмешательством, уменьшение SOC аккумулятора пресекается, и может быть обеспечено максимальное поддержание MWSC-управления.
Отметим, что другие операции являются такими же, что и в третьем варианте осуществления, точные описания будут опущены.
Далее описывается результат.
В устройстве управления для гибридного транспортного средства в четвертом варианте осуществления, в дополнение к результатам (6) в третьем варианте осуществления, достигаются следующие результаты.
(7) Блок управления приведением в движение с проскальзыванием двигателя/электромотора (этап S9 на фиг. 7) сконфигурирован, чтобы выполнять цикличные операции, в которых управление приведением в движение с проскальзыванием электромотора (MWSC-управление) переключается в режим выработки энергии посредством режима приведения в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управление с проскальзыванием), после того как зарядная емкость аккумулятора (SOC аккумулятора) уменьшается до порога вмешательства в управление или ниже во время управления приведением в движение с проскальзыванием электромотора, в то время как режим выработки энергии посредством управления приведением в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управления с проскальзыванием) переключается в режим приведения в движение с проскальзыванием электромотора (MWSC-управление), после того как зарядная емкость аккумулятора повышается до порога отмены вмешательства или выше.
Таким образом, во время выбора управления приведением в движение с проскальзыванием электромотора (MWSC-управления) в ситуациях, которые требуют заряда аккумулятора, применяя режим выработки энергии посредством управления приведением в движение с проскальзыванием двигателя/электромотора (MWSC+CL1-управления с проскальзыванием) посредством цикличных операций в качестве управления вмешательством, возможно пресекать уменьшение SOC аккумулятора и поддерживать максимальным управление приведением в движение с проскальзыванием электромотора (MWSC-управление).
Предшествующее описание приведено со ссылкой на первый-четвертый варианты осуществления. Однако, относительно конкретных структур, эти варианты осуществления не являются ограничивающими. Скорее, изменение конструкции или добавление объектов может быть приемлемым без отступления от сути изобретений, принадлежащих к каждому пункту, описанному в формуле изобретения.
В первом-четвертом вариантах осуществления пример использования блока 201 вычисления оценки уклона поверхности дороги используется в качестве устройства определения нагрузки системы передачи движущей силы. Однако аналогично устройству определения нагрузки системы передачи движущей силы, может быть выполнено обнаружение присутствия или отсутствия буксировки транспортного средства, или может использоваться информация о загрузке грузом. Когда нагрузка системы передачи движущей силы является большой, увеличение скорости транспортного средства замедляется, и вторая муфта CL2 имеет тенденцию к формированию тепла. Дополнительно, могут быть использованы обнаруженная температура, оцененная температура или оцененное количество тепла второй муфты CL2. Например, когда оцененное количество тепла второй муфты CL2 используется в качестве относящейся к системе передачи движущей силы нагрузки, количество формирования тепла CLS будет оцениваться путем интегрирования по времени разностного вращения на концах второй муфты CL2, умноженного на максимальный запас по передаваемому крутящему моменту второй муфты CL2. Затем когда оцененное количество формирования тепла муфты CL2 превышает количество формирования тепла, нагрузка системы передачи движущей силы определяется как большая. В это время, учитывая температуру автоматической коробки передач для вычисления количества формируемого тепла муфты CL2, точность количества формируемого тепла муфты CL2 может быть улучшена.
В первом-четвертом вариантах осуществления, когда уклон вверх поверхности дороги равен предварительно определенному значению или больше, выполняется либо MWSC-управление, либо MWSC+CL1-управление с проскальзыванием. Однако, альтернативно, когда уклон вверх поверхности дороги равен предварительно определенному значению или больше, и обнаруженная температура или оцененная температура второй муфты превышает предварительно определенное значение, может выполняться MSC-управление или MWSC+CL1-управление.
В первом-четвертом вариантах осуществления устройство управления согласно настоящему изобретению применяется к FR-гибридному (заднеприводному) транспортному средству. Однако устройство управления согласно настоящему изобретению может быть равно применимо, конечно, также к гибридному транспортному средству FF-типа (переднеприводному).
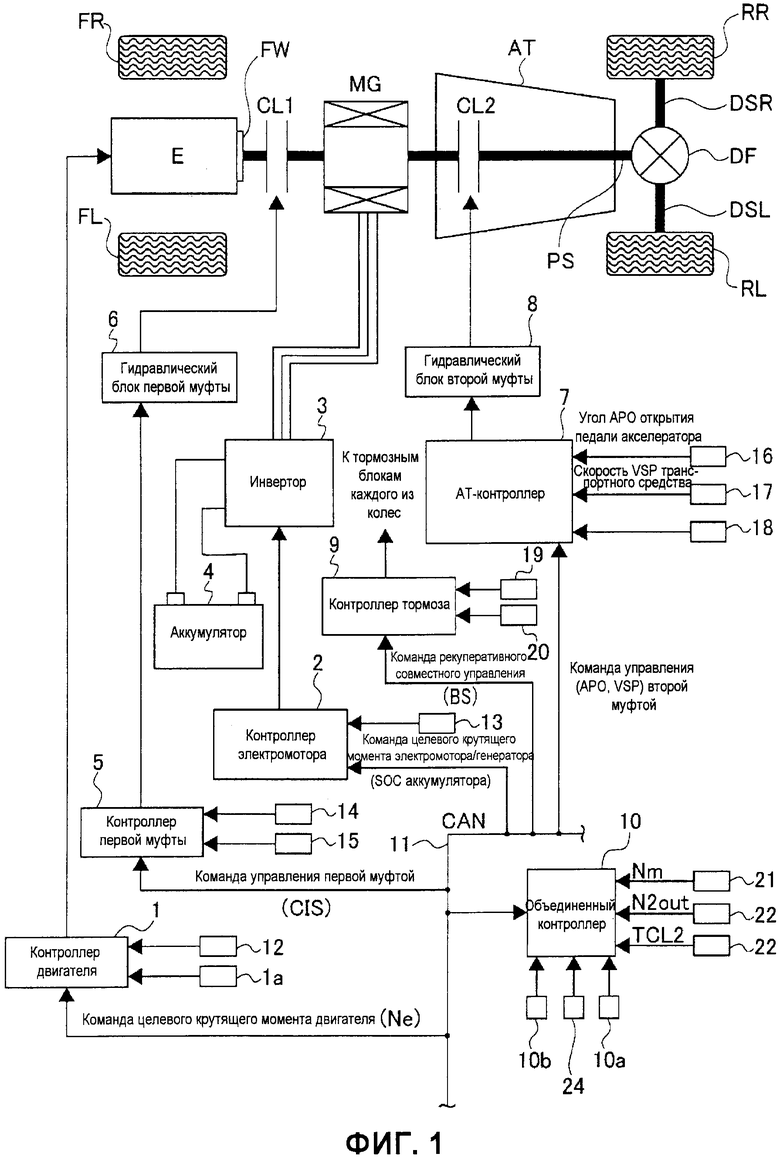
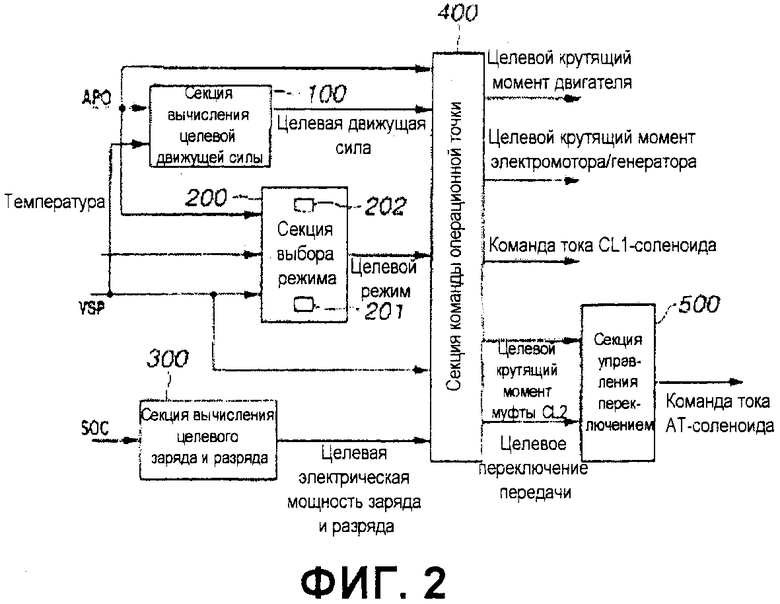
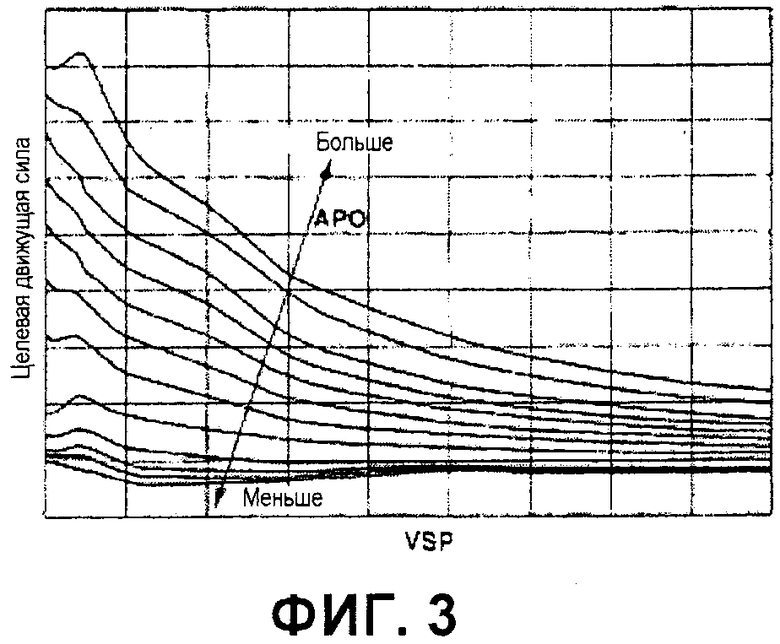
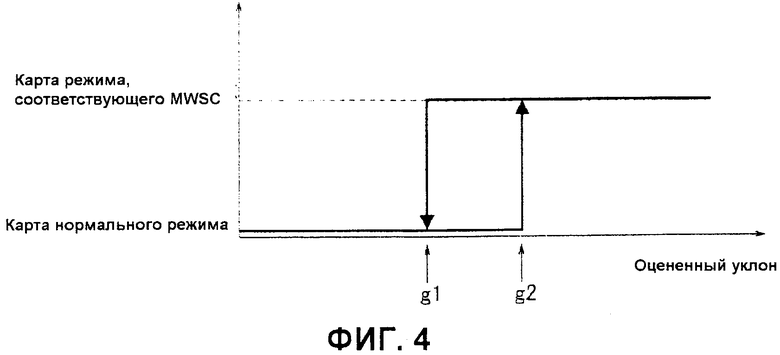
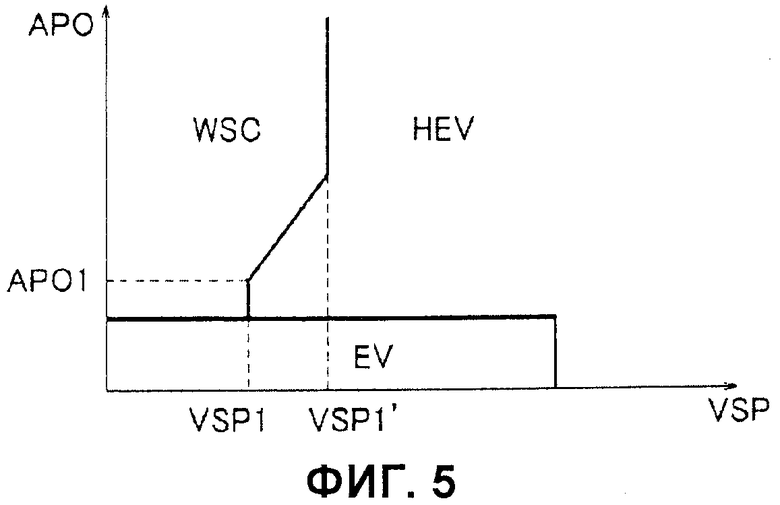
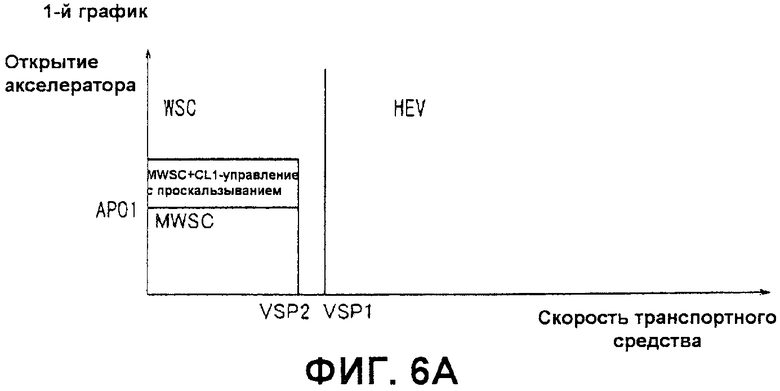

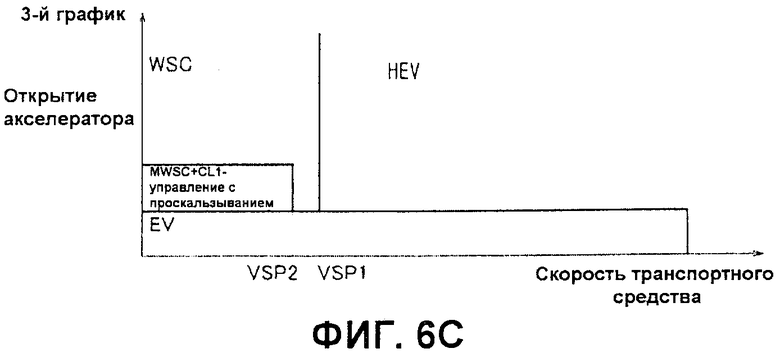
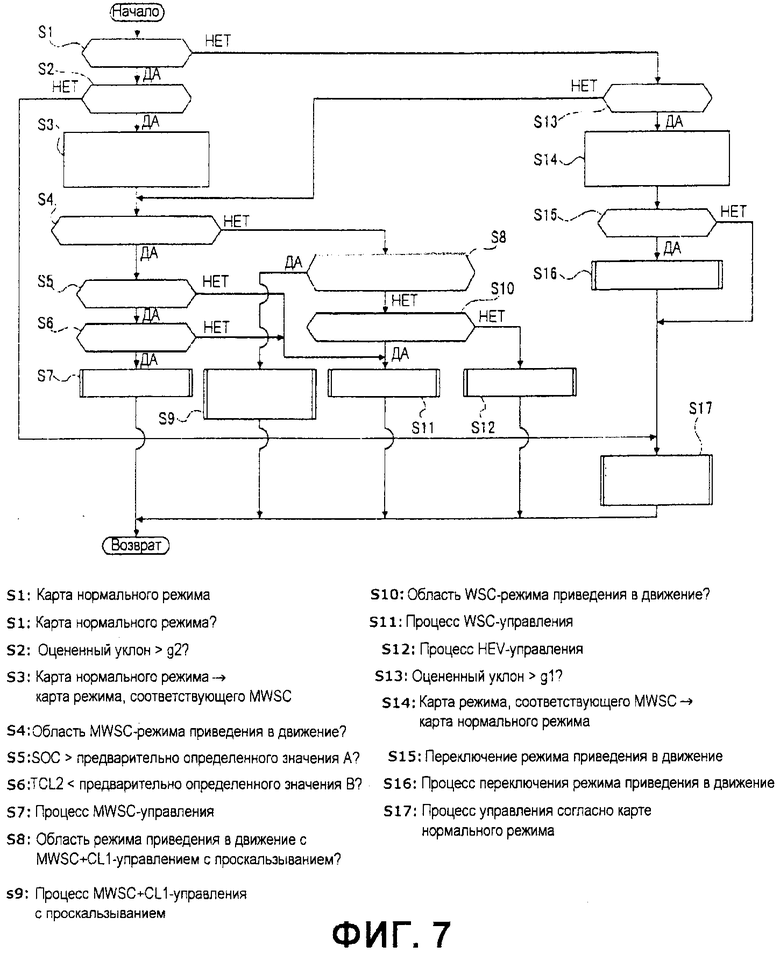

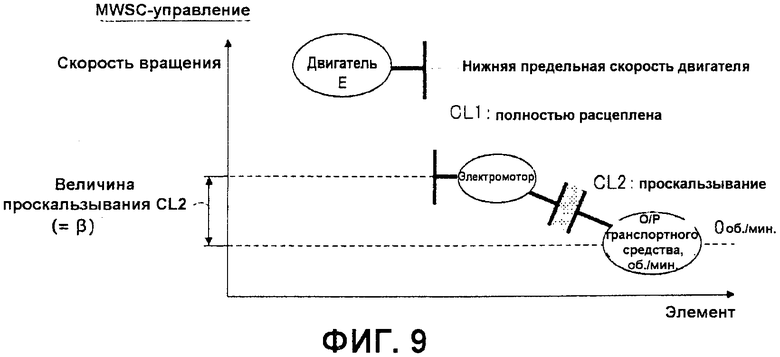
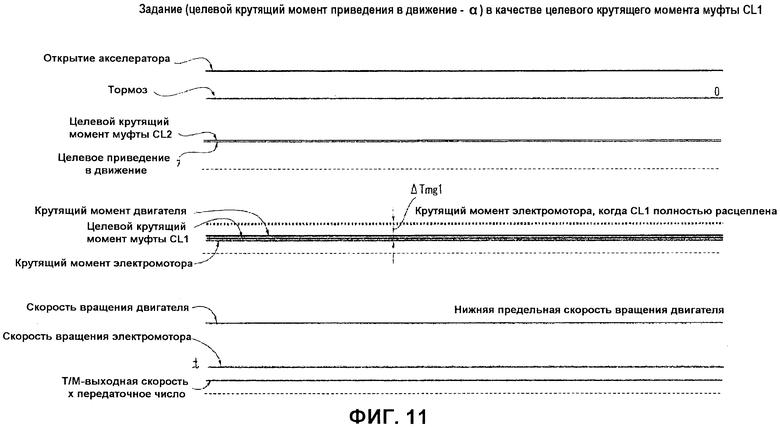
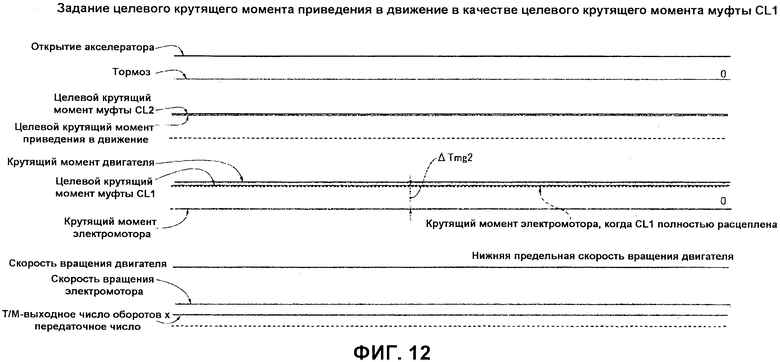
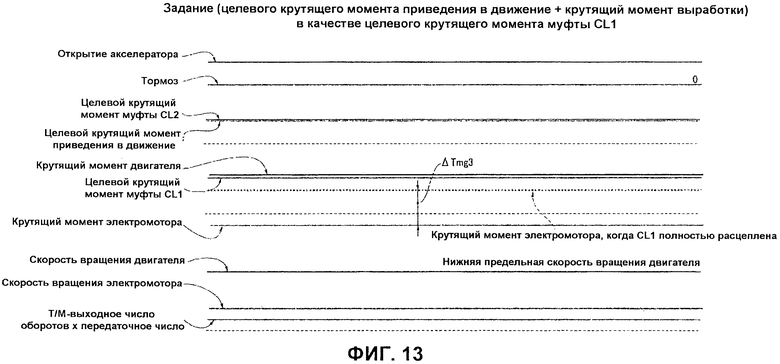
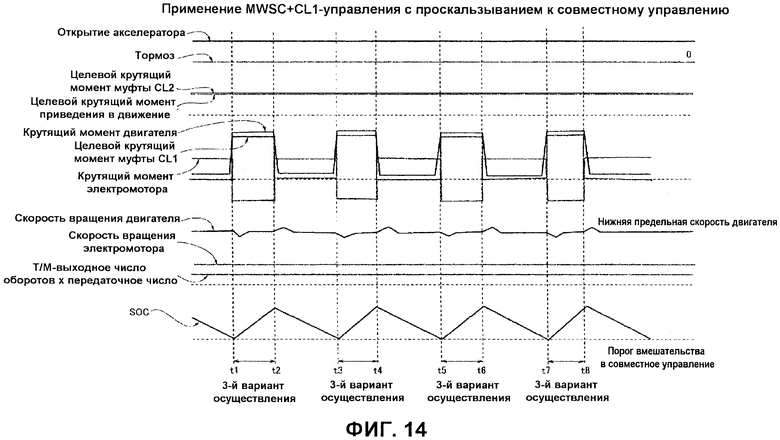
Изобретение относится к устройству управления для гибридного транспортного средства. Устройство управления для гибридного транспортного средства содержит двигатель; мотор, функционирующий для вывода движущей силы транспортного средства и выполнения запуска двигателя; первый элемент сцепления, вставленный между двигателем и электромотором; второй элемент сцепления, вставленный между электромотором и ведущим колесом. Также имеется устройство определения нагрузки системы передачи движущей силы. Устройство также содержит блок управления приведением в движение с проскальзыванием двигателя/электромотора для сцепления с проскальзыванием первого элемента сцепления с двигателем и для сцепления с проскальзыванием второго элемента сцепления с электромотором при скорости вращения, более низкой, чем предварительно определенная скорость вращения. Снижается крутящий момент электромотора. 6 з.п. ф-лы, 14 ил.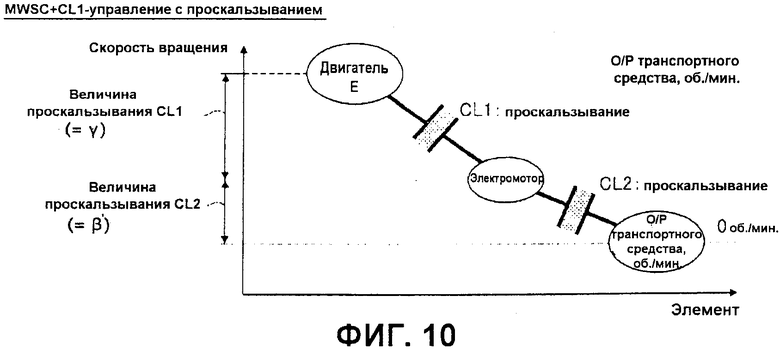
1. Устройство управления для гибридного транспортного средства, содержащее:
двигатель;
мотор, функционирующий для вывода движущей силы транспортного средства и выполнения запуска двигателя;
первый элемент сцепления, вставленный между двигателем и электромотором для выборочного сцепления и расцепления двигателя и электромотора;
второй элемент сцепления, вставленный между электромотором и ведущим колесом для выборочного сцепления и расцепления электромотора и ведущего колеса;
устройство определения нагрузки системы передачи движущей силы либо для определения, либо для оценки нагрузки системы передачи движущей силы; и
блок управления приведением в движение с проскальзыванием двигателя/электромотора для сцепления с проскальзыванием первого элемента сцепления с двигателем, поддерживаемым во вращающемся состоянии с предварительно определенной скоростью вращения, и в то же время для сцепления с проскальзыванием второго элемента сцепления с электромотором при скорости вращения, более низкой, чем предварительно определенная скорость вращения.
2. Устройство управления по п. 1, дополнительно содержащее:
блок управления приведением в движение с проскальзыванием электромотора, который работает, когда нагрузка системы передачи движущей силы равна предварительно определенному значению или превышает его, чтобы расцеплять первый элемент сцепления с
двигателем, который продолжает вращаться с предварительно определенной скоростью вращения, и в то же время, чтобы сцеплять с проскальзыванием второй элемент сцепления с электромотором, вращающимся с более низкой скоростью вращения, чем предварительно определенная скорость вращения, при этом блок управления приведением в движение с проскальзыванием двигателя/электромотора сконфигурирован таким образом, чтобы задавать условия открытия акселератора, при которых управление приведением в движение с проскальзыванием электромотора переходит к управлению приведением в движение с проскальзыванием двигателя/электромотора при верхнем пределе открытия акселератора или выше, при котором выбирается блок управления приведением в движение с проскальзыванием электромотора.
3. Устройство управления по п. 2, в котором блок управления приведением в движение с проскальзыванием двигателя/электромотора сконфигурирован таким образом, чтобы задавать величину проскальзывания второго элемента сцепления во время управления приведением в движение с проскальзыванием двигателя/электромотора согласно состоянию нагрева второго элемента сцепления во время перехода управления от управления приведением в движение с проскальзыванием электромотора.
4. Устройство управления по любому из пп. 1-3, в котором блок управления приведением в движение с проскальзыванием двигателя/электромотора сконфигурирован таким образом, чтобы задавать целевой крутящий момент сцепления первого элемента сцепления в значение крутящего момента, полученное вычитанием предварительно определенного значения из целевого крутящего момента приведения в движение.
5. Устройство управления по любому из пп. 1-3, в котором блок управления приведением в движение с проскальзыванием двигателя/электромотора сконфигурирован таким образом, чтобы задавать целевой крутящий момент сцепления первого элемента сцепления таким, чтобы допускать целевой крутящий момент приведения в движение.
6. Устройство управления по любому из пп. 1-3, в котором блок управления приведением в движение с проскальзыванием двигателя/электромотора сконфигурирован таким образом, чтобы задавать целевой крутящий момент сцепления первого элемента сцепления в значение крутящего момента, полученное добавлением к целевому крутящему моменту приведения в движение крутящего момента выработки энергии.
7. Устройство управления по п. 1, в котором блок управления приведением в движение с проскальзыванием двигателя/электромотора сконфигурирован таким образом, чтобы выполнять циклические операции, в которых управление приведением в движение с проскальзыванием электромотора переключается в режим выработки энергии посредством режима приведения в движение с проскальзыванием двигателя/электромотора, после того как зарядная емкость аккумулятора уменьшается до порога вмешательства в управление или ниже во время управления приведением в движение с проскальзыванием электромотора, в то время как режим выработки энергии посредством управления приведением в движение с проскальзыванием двигателя/электромотора переключается в режим приведения в движение с проскальзыванием электромотора, после того как зарядная емкость аккумулятора растет до порога отмены вмешательства или выше.
| JP 2007314097 A, 06.12.2007 | |||
| JP 2009132195 A, 18.06.2009 | |||
| JP 2010030486 A, 12.02.2010 | |||
| JP 2010155590 A, 15.07.2010 |

