Настоящая заявка относится в целом к визуализации изображений и в частности к способу и системе для выполнения реконструкции изучаемой области (ROI) с максимальным правдоподобием, даже если исходные данные проецирования усечены. В отличие от ранее известных реконструкций с максимальным правдоподобием или других, более общих, итерационных реконструкций ROI, данная реконструкция осуществляется на расширенном множестве ROI. Расширенное множество ROI или области итерации содержит области вне поля обзора сканирования, но все еще в пределах окна изображения системы визуализации, где объекты найдены с помощью расширенной реконструкции поля обзора. Новый способ, описанный здесь, имеет применение во многих различных типах систем визуализации, таких как СТ или другие рентгеновские системы, системы SPECT, системы PEТ и другие системы визуализации. Таким образом, хотя далее речь пойдет о СТ системах визуализации, способ имеет более широкое применение в других визуализациях изображений.
Реконструкция с максимальным правдоподобием - это перспективный способ уменьшить дозу излучения, применяемую к пациенту на СТ обследованиях. Такое уменьшение дозы излучения достигнуто путем учета шумовых характеристик в измеренных данных для улучшения отношения «сигнал/шум». Однако нет аналитического решения для задачи математической реконструкции, поэтому методики итерационной реконструкции часто используются для реконструкции с максимальным правдоподобием. Методики итерационной реконструкции имеют общее строение. Они моделируют прямую проекцию первоначального сбора данных предположением изображения. Эта прямая проекция и измеренная проекция оцениваются для подсчета разницы или соотношения функций, которые могут быть, например, разницей линейных интегралов или разницей числа фотонов на детекторе, или некоторых других критериев. Эти разницы или соотношения функций приводят к обновлению, которое улучшает изображение в том смысле, что, например, разница между прямой проекцией и измерением минимизируется.
Имеются два вида методов итерационных реконструкций. Первый вид, такой как, например, методика алгебраической реконструкции (ART), просто решает систему линейных уравнений и не учитывает статистику измерений. Второй вид итерационной реконструкции включает в себя алгоритмы статистической реконструкции, такие как методы максимальной вероятности, которые предлагают возможность включить статистику фотонов в реконструкцию и попробовать сопоставить теоретическую модель с шумовыми данными настолько близко, насколько возможно. Второй метод приводит к повышению отношения «сигнал/шум» реконструированных изображений, сопоставленных с алгоритмами аналитической реконструкции в таком же разрешении.
Многие методы итерационных реконструкций для СТ требуют, чтобы алгоритм реконструкции повторялся на всем объеме, способствуя поглощению излучения, поэтому вся область сканирования (FOV) системы визуализации реконструируется. Для типичных СТ систем с неусеченными проекциями FOV часто является круглой областью приблизительно от 500 мм до 600 мм в диаметре. Таким образом, реконструкция всей FOV требует большого числа вокселей, особенно в случае высокого разрешения реконструкции, увеличения требуемой вычислительной мощности и времени.
В некоторых ситуациях, однако, изучаемая экспертом область или ROI меньше, чем основная FOV системы визуализации. Одной из таких ситуаций является кардиологическая конусно-лучевая СТ, в которой сердце пациента определяет ROI. Поэтому известны для итерационной реконструкции только ROI плюс небольшой переходный диапазон, окружающий ROI, например, как описано Анди Зиглером, Тимом Нильсеном и Михаэлем Грассом в «Итерационной реконструкции изучаемой области трансмиссионной томографии», Мед. Физ. 35(4), Апрель 2008, страницы 1317-1327, здесь в качестве ссылки. Сопоставленные с полной FOV итерационной реконструкции, такие способы уменьшают время реконструкции уменьшением числа вокселей, которые используются для реконструкции.
Согласно одному аспекту изобретения способ и система предложены для формирования изображения изучаемой области. Согласно этому аспекту собирают данные визуализации для формирования измеренных данных синограммы, которая реконструируется для формирования реконструированного изображения туннеля. Область итерации определяется в реконструированном изображении туннеля, которое включает часть внутри области сканирования системы визуализации и часть вне области сканирования. Область итерации удаляется из реконструированного изображения туннеля для формирования промежуточного изображения, которое является прямым проецированием для формирования смоделированных данных частичной информационной синограммы. Смоделированные данные частичной синограммы вычитаются из данных измеренной полной синограммы для формирования данных области итерации синограммы, которая реконструируется для формирования изображения изучаемой области.
Настоящее изобретение уменьшает визуальные искажения, которые могут возникать при использовании ранее известных реконструкций изучаемой области. Далее аспекты настоящего изобретения будут оценены специалистами в данной области при чтении и истолковании прилагающегося детального описания. Многочисленные дополнительные достоинства и преимущества будут далее очевидны. Изобретение может принимать форму в различных составляющих и компоновках составляющих и в различных технологических операциях и составляющих технологических операций. Чертежи присутствуют только с целью иллюстрации выбранных вариантов осуществления и не должны быть истолкованы как ограничение изобретения.
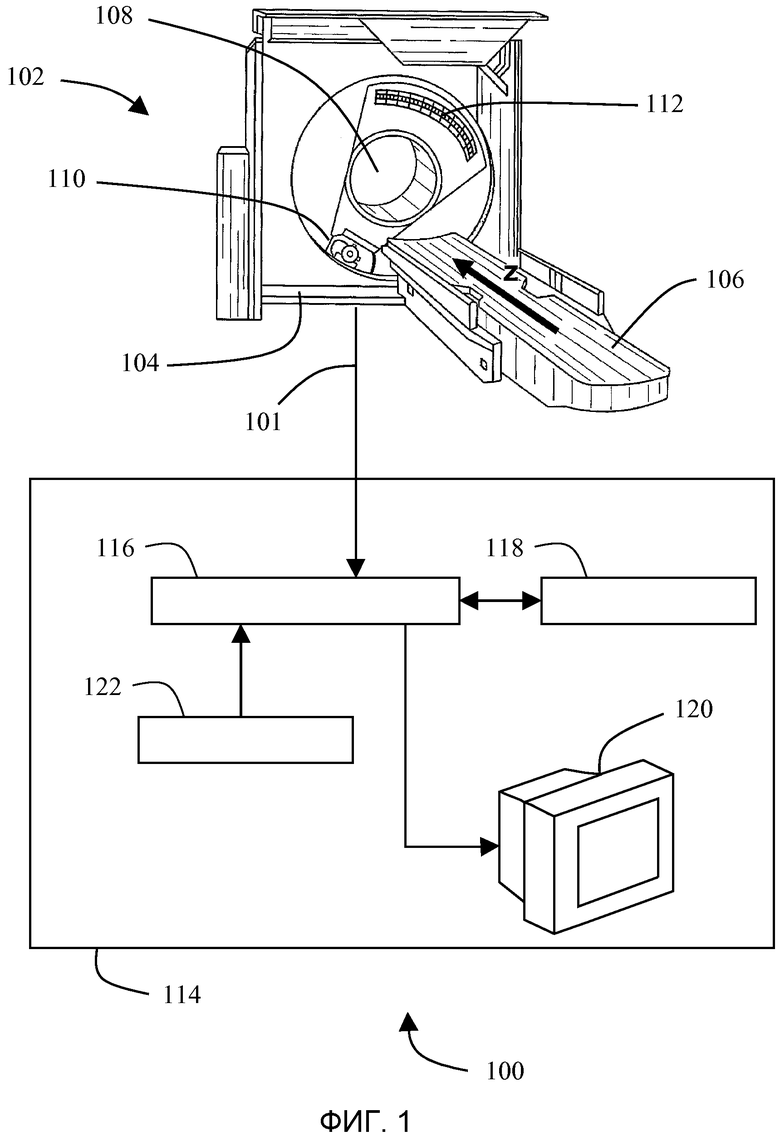
Фиг.1 показывает примерную СТ систему визуализации;
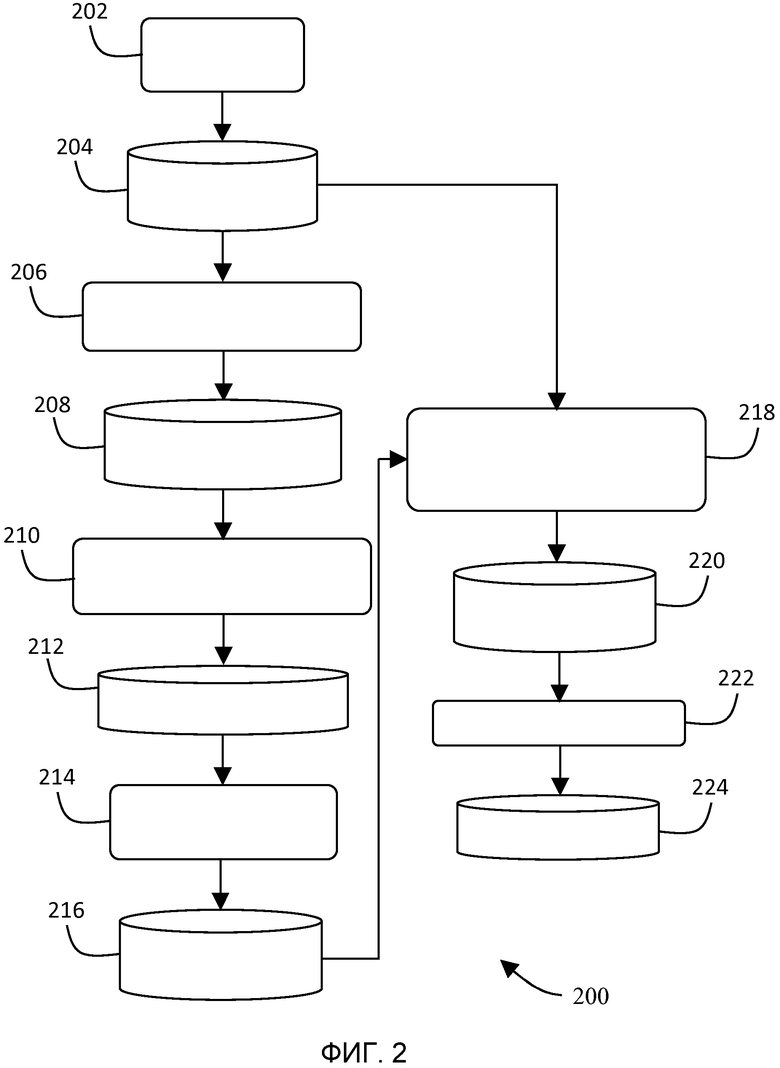
Фиг.2 показывает известный метод Зиглера и др., указанные выше;
Фиг.3 является типичным примером измеренной синограммы, сформированной с использованием программного моделирования и способа из Фиг.2;
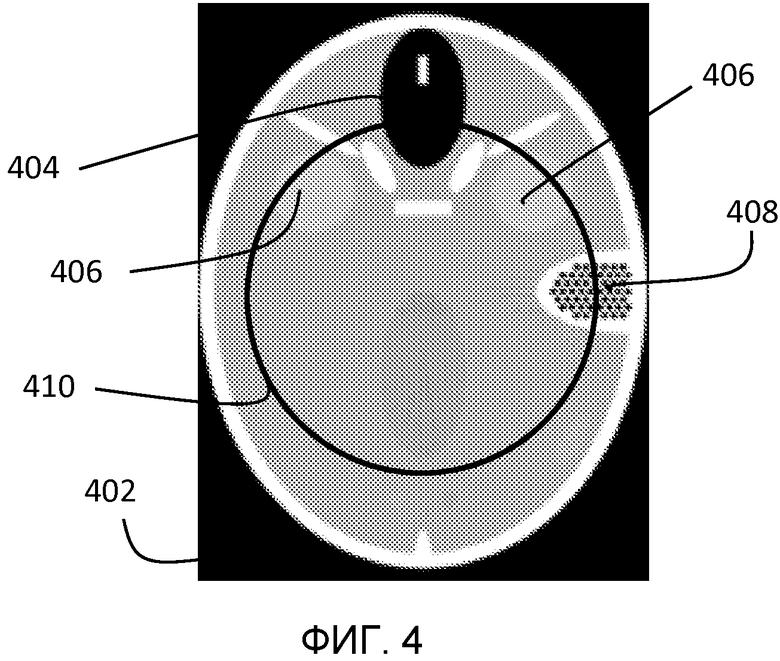
Фиг.4 является частью полного FOV реконструированного изображения, созданного с использованием программного моделирования и способа на Фиг.2;
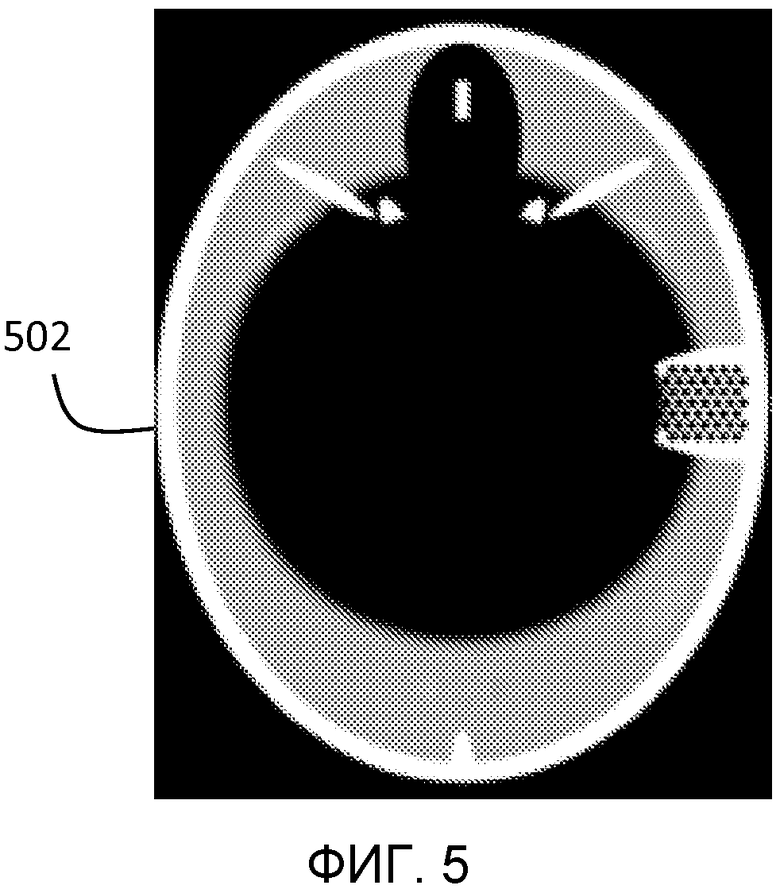
Фиг.5 является промежуточным изображением, сформированным с использованием программного моделирования и способа Фиг.2, где ROI Фиг.4 определена и удалена;
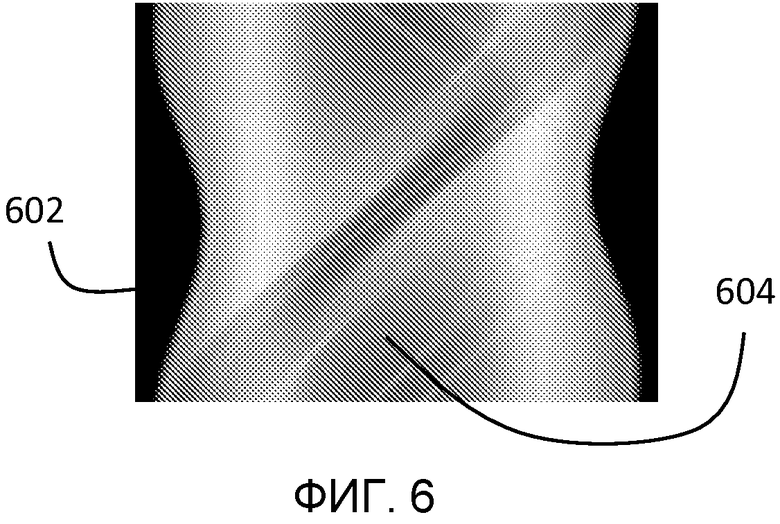
Фиг.6 является смоделированной частичной синограммой, сформированной с использованием программного моделирования и способа Фиг.2, с прямой проекцией Фиг.5;
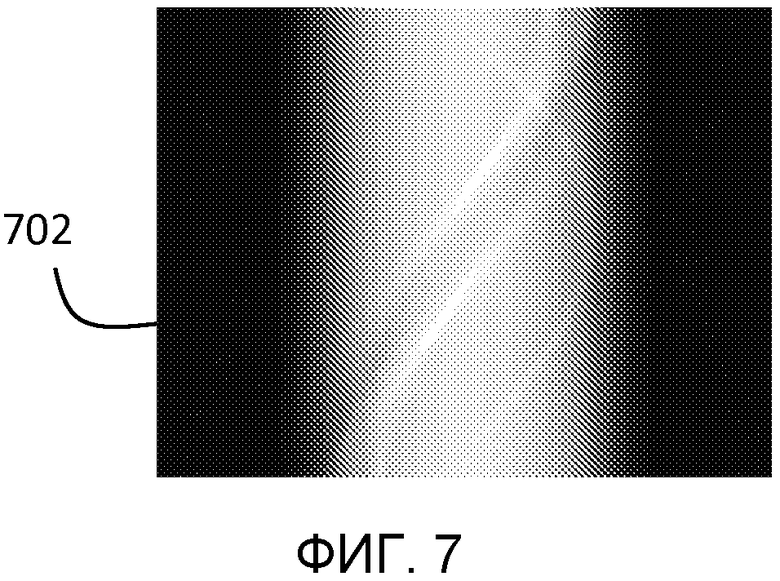
Фиг.7 является типичным примером синограммы ROI, сформированной с использованием программного моделирования и способа Фиг.2 вычитанием Фиг.6 из Фиг.3;
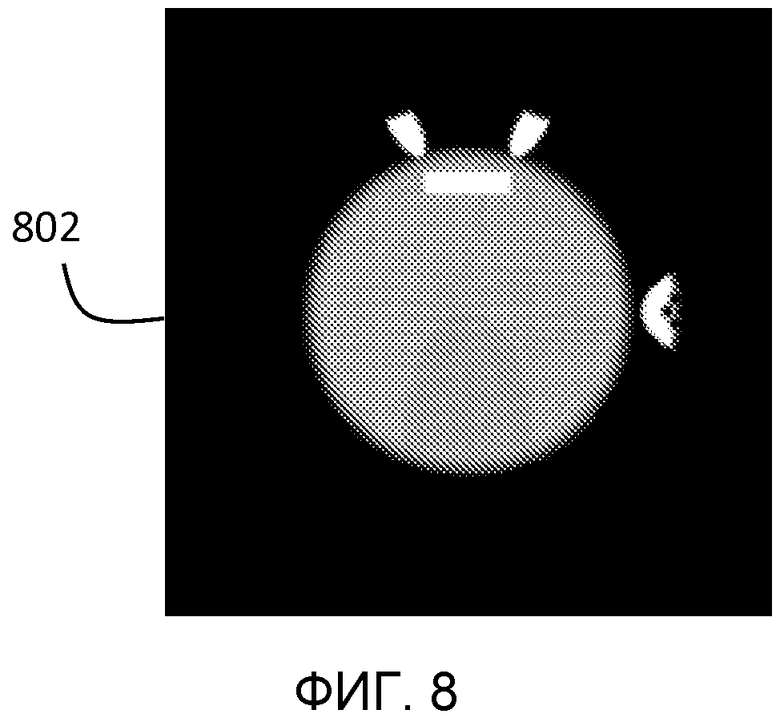
Фиг.8 является типичным примером реконструированного изображения ROI, сформированного с использованием программного моделирования и способа Фиг.2;
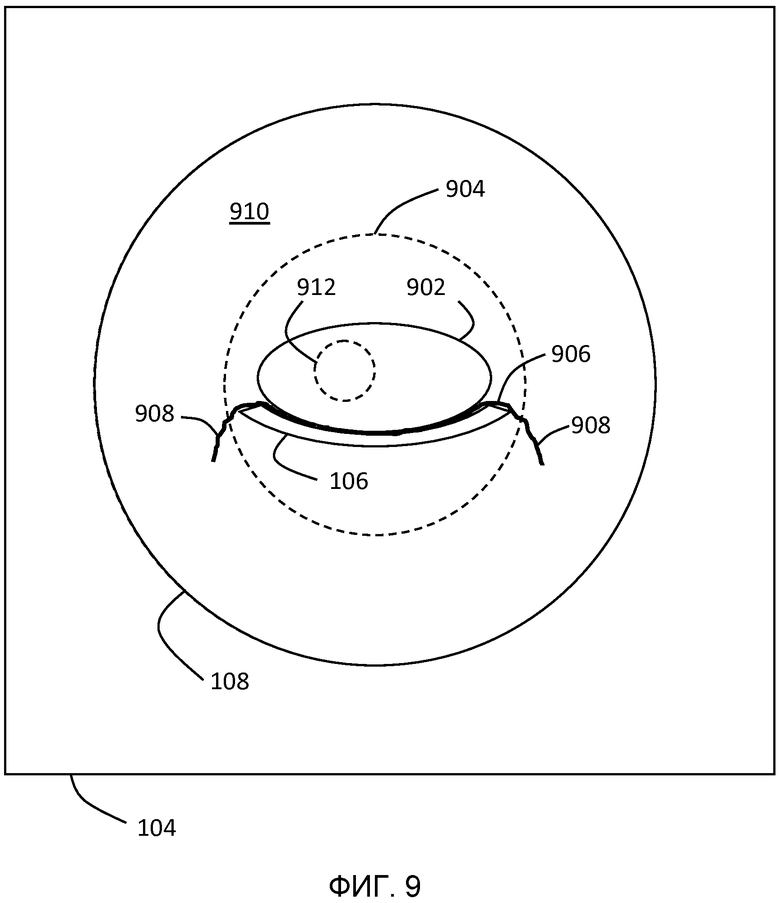
Фиг.9 иллюстрирует гентри Фиг.1 при наличии пациента на столе внутри туннеля и объект проходит за FOV сканирования;
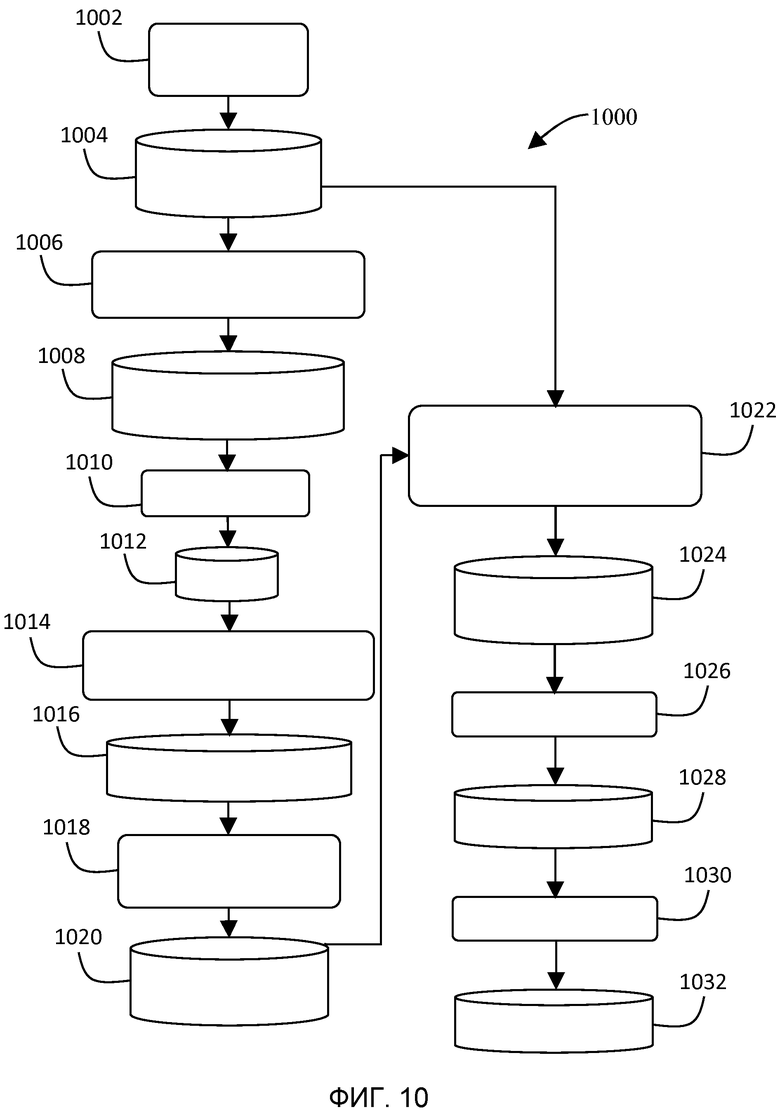
Фиг.10 показывает процесс реконструкции изображения изучаемой области согласно аспекту настоящего изобретения; и
Фиг.11 является изображением реконструкции размера туннеля, показывающим область итерации (RTI).
Примерная СТ система визуализации показана на Фиг.1. СТ система 102 визуализации включает в себя гентри 104 и стол или другую консоль 106, которая перемещается вдоль оси аппликат. Пациент или другой объект визуализации (не показан на Фиг.1) ложится на стол 106 и перемещается для расположения внутри апертуры или туннеля 108 в гентри 104. Как только пациент будет находиться в нужном положении, источник 110 рентгеновского излучения и детектор 112 рентгеновского излучения поворачиваются вместе вокруг туннеля 108 и регистрируют данные СТ визуализации.
СТ система 102 визуализации далее передает данные СТ визуализации на обработку СТ визуализации и систему 114 индикации через устройство 101 коммуникационной связи. Хотя системы 102 и 114 показаны и описаны здесь как отдельные системы с целью иллюстрации, они могут в других воплощениях быть частью одной системы. Данные СТ визуализации передаются на блок 116 обработки изображений, который сохраняет данные в запоминающем устройстве 118. Блок 116 обработки изображений в электронном виде обрабатывает данные, чтобы выполнить реконструкцию изображения, как описано более полно ниже. Блок 116 обработки изображений может показывать итоговые изображения на присоединенном дисплее 120. Пользовательский ввод 122, такой как клавиатура и/или мышь, могут быть предоставлены пользователю для контроля блока 116.
Таким образом, вышеупомянутые функции могут выполняться как логическая схема. «Логическая схема», как использовано здесь, включает в себя без ограничения аппаратно-программное воплощение, программное обеспечение и/или комбинации каждого для выполнения функции(ий) или действия(ий) и/или вызова функции или действия из другого компонента. Например, основанный на желаемом применении или потребности, логическая схема может включать в себя микропроцессор, контролируемый программным обеспечением, дискретной логикой, такой как применение конкретной интегральной схемы (ASIC), или другим запрограммированным устройством логической схемы. Логическая схема может также быть полностью воплощена как программное обеспечение.
«Программное обеспечение», как использовано здесь, включает, но без ограничения, одну или более считываемые компьютером и/или выполняемые инструкции, которые побуждают компьютер или другое электронное устройство выполнять функции, действия и/или работать желаемым образом. Инструкции могут быть воплощены в различных формах, таких как программы, алгоритмы, модули или программы, включающие в себя отдельные приложения или код из динамически связанных библиотек. Программное обеспечение может также быть реализовано в различных формах, таких как системно-независимая программа, вызов функции, сервлет, апплет, инструкции, сохраненные в памяти, такой как запоминающее устройство 118, части операционной системы или другом типе выполняемых инструкций. Для специалиста очевидно, что форма программного обеспечения зависит от, например, запросов выбранного приложения, среды, в которой оно работает, и/или предпочтений дизайнера/программиста и т.п.
Системы и способы, описанные здесь, могут быть реализованы на множестве платформ, включающих в себя, например, сетевые системы управления и автономные системы управления. Кроме того, логическая схема, показанная и описанная здесь, предпочтительно находится в или на считываемом компьютером носителе, таком как запоминающее устройство 118. Примеры различных считываемых компьютером устройств включают в себя флэш-память, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), программы постоянного запоминающего устройства (PROM), электрически программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое запоминающее устройство (EEPROM), магнитный диск или магнитная лента, оптически считываемые носители информации, включающие в себя CD-ROM и DVD-ROM, и другие. Более того, процессы и логическая схема, описанные здесь, могут быть объединены в одну большую технологическую схему или разделены на множество субтехнологических потоков. Порядок, в котором технологические потоки здесь были описаны, не решающий и может быть переставлен, в то же время, для достижения таких же результатов. Действительно, технологические потоки, описанные здесь, могут быть переставлены, консолидированы и/или реорганизованы в их реализации как гарантировано или желаемо.
Известный уровень техники, метод итерационных реконструкций ROI Зиглера и соавтор., определенный выше, показан на Фиг.2. На этапе 202 данные визуализации получают, например, выполнением сканирования изображения для формирования данных 204 полной измеренной информационной синограммы 204. Данные 204 представляют серию двухмерных изображений, полученных детектором 112 рентгеновского излучения при различных угловых позициях при вращении вокруг отображаемого пациента в апертуре 108. Типичный пример полученной полной синограммы 302 показан на Фиг.3, которая была создана с помощью программного моделирования реконструкции фактического изображения с использованием математической модели головы как объекта визуализации.
Используя измеренные данные 204 полной синограммы, полная реконструкция FOV выполняется 206 с использованием неитерационного алгоритма реконструкции, такого как отфильтрованная реконструкция обратного проецирования. В результате чего получают полное FOV реконструированное изображение 208. Типичный пример такой полного FOV реконструированного изображения показан на Фиг.4, которая показывает изображение 402 математической модели головы, используемой для создания синограммы 302 Фиг.3. Таким образом, изображение 402 включает в себя смоделированную лобную синусовую область 404, два смоделированных глаза 406 и одно смоделированное внутренне ухо 408.
ROI внутри полной FOV реконструированного изображения 208 далее определяется и удаляется 210. ROI может быть определена пользователем, взаимодействующим с изображением полного FOV реконструированного изображения 208, показанным на мониторе 120. ROI может, кроме того, быть определена с использованием обычных автоматизированных методов для уменьшения или устранения участия пользователей, или с использованием другого метода. ROI 410 определена на Фиг.4. Когда ROI, такая как 410, определена, она вырезается 210 из полной FOV реконструированного изображения 208, предпочтительно сохраняя плавный переход к созданию промежуточного изображения 212. Примерное промежуточное изображение 502 показано на Фиг.5, где ROI 410 была удалена с полной FOV реконструированного изображения 402 Фиг.4.
Промежуточное изображение 212 далее прямым способом проецируется 214 для формирования смоделированных данных 216 частичной синограммы. Данные 216 представляют серии двумерных изображений, которые были бы получены детектором 112 рентгеновского излучения при различных угловых позициях во время его поворота вокруг объекта, как показано на промежуточном изображении 212, то есть без присутствия ROI. Типичный пример смоделированной частичной синограммы 602 показан на Фиг.6, которая была сформирована прямым проецированием промежуточного изображения 502 Фиг.5. Как может быть видно, смоделированная частичная синограмма 602 отличается от полной измеренной синограммы 302 тем, что в ней есть более темный столбец 604, проходящий через ее центральную область, как результат вырезания ROI на этапе 210. Прямое проецирование на этапе 214 формирует несколько смоделированных двумерных изображений 216, каждое из которых соответствует угловому положению одного из двумерных изображений данных 204 полной синограммы.
Смоделированные данные 216 частичной синограммы затем вычитаются 218 из соответствующих данных 204 измеренной полной синограммы в том же угловом положении для формирования данных 220 ROI синограммы. Данные 220 представляют серии двумерных изображений, которые были бы получены детектором 112 рентгеновского излучения в различных угловых позициях во время его поворота вокруг ROI, включая область плавного перехода вокруг ROI, но без других частей объекта, которые не представляют интереса. Типичный пример синограммы 702 ROI показан на Фиг.7, которая была сформирована вычитанием смоделированной частичной синограммы 602 Фиг.6 из полной измеренной синограммы 302 Фиг.3. Данные 220 ROI синограммы могут далее быть проанализированы блоком 116 обработки изображений с использованием стандартных методов 222 реконструкции, таких как итерационная реконструкция, для создания изображения 224 ROI. В некоторых случаях реконструкция 222 может включать в себя части данных 204 измеренной полной синограммы в дополнении к данным 220 ROI синограммы. Посмотрите, например, Патрика И. Ла Ривьера, «Монотонные Итерационные Алгоритмы Реконструкции для Целевой Реконструкции в Излучающей и Отражающей Компьютерной Томографии», 206 IEEE Отчет Симпозиума Конференции Ядерных Наук, страницы 2924-2928, здесь включенные в качестве ссылки. Типичный пример реконструированной ROI изображения 802 показан на Фиг.8, которая была создана реконструкцией 222 данных 702 синограммы Фиг.7.
Одним ограничением известного метода на Фиг.2 является то, что он полагается на верную реконструкцию изображения внутри ROI, созданной на этапе 206. Это возможно, если неусеченные проекции установлены в данных 204 измеренной синограммы, такой как доступной внутри FOV сканирования системы 100 визуализации. Однако во многих случаях объекты также представлены снаружи FOV сканирования, но внутри туннеля 108 гентри 104. Такие объекты могут включать, например, кабели, участки покрытия, участки пациента или даже стола пациента. В такой ситуации известный метод Фиг.2 не может предоставить желаемую синограмму ROI, потому что только усеченные проекции доступны к визуализации объектов снаружи FOV сканирования. Таким образом, известная итерационная реконструкция Фиг.2 ограничена в этом отношении.
Такая ситуация проиллюстрирована на Фиг.9, показывающей гентри 104 СТ системы 100 визуализации Фиг.1, с пациентом 902, расположенным на столе 106 внутри туннеля 108 гентри 104. Пунктирные окружности показывают FOV 904 сканирования системы 100, то есть область визуализации, в которой неусеченные проекции могут быть измерены с помощью детектора 112 рентгеновского излучения, когда он поворачивается вокруг туннеля 108. Покрывало 906 используется для удобства пациента 902. Участки 908 покрывала 906 располагаются снаружи FOV 904 сканирования и внутри окружности 910 снаружи FOV 904 сканирования, но все еще внутри туннеля 108. Детектор 112 рентгеновского излучения может объединять данные визуализации в объекты внутри окружности 910, как участки 908 покрывала 906, но такие данные визуализации будут вырезаны. Типичная ROI 912 внутри пациента 902, такая как кардиальная область, также определена на Фиг.9.
Примерный процесс 1000 реконструкции изображения изучаемой области в соответствии с одним аспектом настоящего изобретения показан на Фиг.10, который может быть использован для формирования изображения ROI 912 даже через участки 908 покрывала 906 (и, возможно, других объектов), представленных в окружности 910 снаружи FOV сканирования 904.
На этапе 1002 получают данные визуализации, например, выполнением сканирования изображения для формирования измеренных данных 1004 полной синограммы. Данные 1004 представляют серии двумерных изображений, полученных детектором 112 рентгеновского излучения в различных угловых позициях при вращении вокруг отображаемого пациента 902 в туннеле 108.
На этапе 1006 выполняют полную реконструкцию туннеля 118 системы визуализации с использованием данных 1004 измеренной полной синограммы. Реконструкция может быть обычной отфильтрованной обратной проекции и другой неитерационной реконструкцией. Эти результаты показаны на реконструкции изображении туннеля 108. Таким образом, как показано на Фиг.9, например, реконструированное изображение 1008 туннеля включает в себя объекты внутри FOV 904 сканирования системы визуализации 100, такой как пациент 902 и стол 106. Реконструкция изображения 1008 туннеля также включает в себя другие объекты в окружности 910 снаружи FOV 904 сканирования, но все еще внутри туннеля 108 системы 100 визуализации, такие как участки 908 покрывала 906. Измеренные данные 1004 полной синограммы являются не усеченными для объектов внутри FOV 904 сканирования, но данные 1004 являются усеченными для объектов внутри окружности 910 снаружи FOV 904 сканирования. Следовательно, очень вероятно будут дефекты на участках изображения 1008, которые находятся внутри окружности 910.
ROI внутри реконструированного изображения 1008 туннеля определяется на этапе 1010. Изучаемой областью может быть, например, вся область груди пациента 902, или другой объект для визуализации, или, возможно, только часть, такая как кардиальная область 912. В дополнение, объекты визуализации (или их участки) в окружности 910 снаружи FOV 904 сканирования, но внутри туннеля 108, также определяются. Такие объекты могут включать в себя, например, поддерживающий стол, кабели, лампы, покрытия, части пациента и тому подобное. Область итерации или RTI определяется комбинацией ROI с объектами (или их участками) в окружности 910. RTI 1012 может быть определена пользователем, взаимодействующим с проекцией реконструированного изображения туннеля 1008, отображаемой на мониторе 120. RTI 1012 может поочередно быть определена с использованием обычных автоматизированных методов для уменьшения или устранения участия пользователя или с помощью других методов.
Например, Фиг. 11 является изображением 1102 пациента-ребенка, лежащего на верхней части подушки покрывала внутри туннеля системы визуализации. Большая сплошная линия окружности соответствует FOV сканирования системы визуализации, используемой для формирования изображения 1102. Пунктирный овал в центре изображения соответствует ROI, которая в этом случае является всей областью груди пациента. Остальные участки, выделенные штриховкой, являются двумя участками подушки покрывала, которое располагается снаружи FOV сканирования, а также тремя другими объектами, которые находятся снаружи FOV сканирования, но внутри туннеля системы визуализации. На примере Фиг. 11 RTI 1012 соответствует пунктирной области в центре изображения и пяти заштрихованным участкам, которые находятся снаружи FOV сканирования.
Когда RTI 1012 определяется, она вырезается 1014 из реконструированного изображения туннеля 1008, желательно, с сохранением области плавного перехода вокруг ROI и других объектов внутри окружности 910, для создания промежуточного изображения 1016. Это может быть реализовано установкой всех величин вокселей в RTI 1012 на ноль с плавным усилением в зонах перехода. Промежуточное изображение 1016 подвергают прямому проецированию 1018 для формирования данных 1020 смоделированной неполной синограммы, желательно, в геометрии наблюдения начального сканированного изображения 1002. Однако также могут быть использованы другие геометрии. Данные 1020 представляют серии двумерных изображений, которые будут получены детектором 112 рентгеновского излучения в различных угловых позициях при вращении вокруг объекта, как показано на промежуточном изображении 1016, которое представлено без RTI 1012. Этап 1018 прямого проецирования формирует несколько смоделированных двумерных изображений 1020, каждое из которых соответствует угловой позиции одного из двумерных изображений полной информационной синограммы 1004.
Данные 1020 моделированной частичной синограммы далее вычитаются 1022 из соответствующих данных 1004 полной измеренной синограммы того же угла для создания данных 1024 RTI синограммы. Данные 1024 представляют серии двумерных изображений, которые будут получены детектором 112 рентгеновского излучения в различных угловых позициях при вращении вокруг RTI 1012, включая области плавного перехода. Данные 1024 RTI синограммы могут далее быть проанализированы блоком изображений 116 с использованием стандартных методик реконструкции 1026, таких как итерационная реконструкция, для формирования изображения 1028 RTI. На этапе 1030 участки RTI изображения, которые не находятся в ROI, удаляются вычитанием, сегментированием, выбором пользователем области и тому подобное. Оставшиеся данные изображения содержат в себе изображение ROI 1032. Реконструкция может быть, например, реконструкцией с максимальным правдоподобием и может включать в себя использование данных 1004 полной синограммы в дополнение к данным 1024 RTI синограммы.
Различные воплощения данного изобретения могут включать ранее обсуждаемый порядок этапов в процессе 1000 в различных порядках. В дополнение, различные воплощения могут включать либо больше, либо меньше этапов, чем ранее обсуждаемый порядок этапов в процессе 1000.
Изобретение было описано со ссылкой на предпочтительное воплощение. Очевидно, модификации и внесение изменений будут иметь место при прочтении и толковании предшествующего детального описания. Это предполагает, что изобретение сконструировано, включая все такие модификации и внесения изменений, соответственно они находятся внутри объема прилагаемой формулы изобретения или ее эквивалентов. Изобретение может принимать вид в различных составляющих и компоновках составляющих и в различных технологических операциях и составляющих технологических операций. Чертежи присутствуют только с целью иллюстрации выбранных вариантов осуществления и не должны быть истолкованы как ограничение изобретения.
Изобретение относится к области визуализации изображений, в частности к способу и системе для выполнения реконструкции изучаемой области (ROI) с максимальным правдоподобием, даже если исходные данные проецирования усечены. Техническим результатом является уменьшение визуальных искажений реконструированных изображений. В способе реконструкции изображения для формирования изображения изучаемой области собирают данные изображения, связанные с объектом визуализации в туннеле системы визуализации для формирования измеренных данных полной синограммы. Используют измеренные данные для выполнения реконструкции изображения туннеля и формирования реконструированного изображения туннеля. Определяют область итерации в реконструированном изображении. Удаляют область итерации из реконструированного изображения для формирования промежуточного изображения. Выполняют прямое проецирование промежуточного изображения для формирования данных смоделированной частичной синограммы. Вычитают данные смоделированной частичной синограммы из измеренных данных полной синограммы для формирования области итерации данных синограммы. Реконструируют данные области итерации синограммы для формирования изображения изучаемой области. 2 н. и 12 з.п. ф-лы, 11 ил.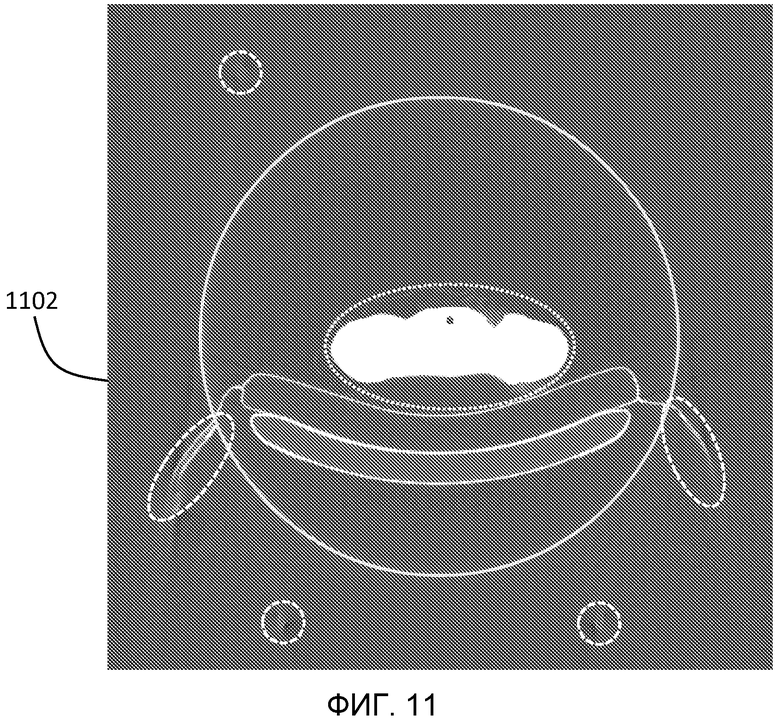
1. Способ реконструкции изображения для формирования изображения изучаемой области, в котором:
собирают данные (1002) изображения, связанные с объектом визуализации в туннеле (108) системы визуализации (100) для формирования измеренных данных (1004) полной синограммы;
используют измеренные данные (1004) полной синограммы для выполнения реконструкции (1006) изображения туннеля и формирования реконструированного изображения (1008) туннеля, причем реконструированное изображение туннеля включает в себя, по меньшей мере, часть первого элемента внутри области сканирования системы визуализации и, по меньшей мере, часть второго элемента снаружи области сканирования, но внутри туннеля;
определяют область итерации (1012) в реконструированном изображении туннеля, причем область итерации содержит изучаемую область внутри области сканирования, а также, по меньшей мере, часть второго элемента снаружи области сканирования;
удаляют область итерации из реконструированного изображения туннеля для формирования промежуточного изображения (1016);
выполняют прямое проецирование промежуточного изображения для формирования данных (1020) смоделированной частичной синограммы;
вычитают данные смоделированной частичной синограммы из измеренных данных полной синограммы для формирования области итерации данных (1024) синограммы; и
реконструируют данные области итерации синограммы для формирования изображения изучаемой области.
2. Способ по п. 1, в котором реконструкция изображения туннеля системы визуализации является неитерационной реконструкцией.
3. Способ по п. 2, в котором реконструкция изображения туннеля системы визуализации является отфильтрованной реконструкцией обратного проецирования.
4. Способ в соответствии с любым предшествующим пунктом, в котором этап удаления содержит сохранение области плавного перехода вокруг изучаемой области в реконструированном изображении туннеля.
5. Способ в соответствии с любым из пп. 1-3, в котором прямое проецирование промежуточного изображения выполнено в геометрии наблюдения отсканированного изображения.
6. Способ в соответствии с любым из пп. 1-3, в котором реконструкция данных области итерации синограммы является итерационной реконструкцией.
7. Способ по п. 6, в котором итерационная реконструкция является реконструкцией с максимальным правдоподобием.
8. Система (100) для выполнения реконструкции для формирования изображения изучаемой области, причем система содержит машиночитаемый носитель (116), сконфигурированный для получения данных изображения, причем машиночитаемый носитель (116) содержит логическую схему для:
выполнения сканирования (1002) изображения объекта визуализации в туннеле (108) системы визуализации для формирования измеренных данных (1004) полной синограммы;
использования измеренных данных (1004) полной синограммы для выполнения реконструкции (1006) изображения туннеля и формирования реконструированного изображения (1008) туннеля, причем реконструированное изображение (1008) туннеля включает в себя изучаемую область внутри области сканирования системы визуализации и, по меньшей мере, часть второго элемента снаружи области сканирования, но внутри туннеля;
определяют область итерации (1012) в реконструированном изображении туннеля, причем область итерации содержит изучаемую область и, по меньшей мере, часть второго элемента снаружи области сканирования;
удаления области итерации из реконструированного изображения туннеля для формирования промежуточного изображения (1016);
выполнения прямого проецирования промежуточного изображения для формирования данных (1020) смоделированной синограммы;
вычитания данных смоделированной частичной синограммы из измеренных данных полной синограммы для формирования области итерации данных (1024) синограммы; и
реконструкции данных области итерации синограммы для формирования изображения изучаемой области.
9. Система по п. 8, в которой реконструкция изображения туннеля системы визуализации является неитерационной реконструкцией.
10. Система по п. 9, в которой реконструкция изображения туннеля системы визуализации является отфильтрованной реконструкцией обратного проецирования.
11. Система по пп. 8, 9 или 10, в которой этап удаления содержит сохранение области плавного перехода вокруг изучаемой области в реконструированном изображении туннеля.
12. Система по любому из пп. 8-10, в которой прямое проецирование промежуточного изображения выполнено в геометрии наблюдения отсканированного изображения.
13. Система по п. 8, в которой реконструкция данных области итерации синограммы является итерационной реконструкцией.
14. Система по п. 13, в которой итерационная реконструкция является реконструкцией с максимальным правдоподобием.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 6915005 B1, 05.07.2005 | |||
| СПОСОБ РАДИАЦИОННОЙ ВЫЧИСЛИТЕЛЬНОЙ ВИБРОТОМОГРАФИИ | 1992 |
|
RU2114419C1 |

