Изобретение относится к области освоения минеральных ресурсов арктического шельфа. Уровень развития научно-технической базы в этой области требует разработки новых методов и средств добычи полезных ископаемых.
В настоящее время подъем, перемещения и монтаж объектов обустройства месторождений производится с надводных крановых судов. Работа этих судов зависит от метеоусловий и ледовой обстановки в районе строительства.
Например, крановое судно с краном грузоподъемностью 600 тонн с глубиной опускания груза 400 метров имеет ограничения по степени волнения моря - не более 3-х баллов. (Караев Р.Н., Портной А.С., Разуваев В.И. «Суда и плавучие технические средства для освоения морских нефтегазовых месторождений», С-Петербург, Моринтех, 2009).
Известен способ подъема и перемещения затонувших кораблей (судов) с помощью продувания сжатым воздухом судоподъемных понтонов. Однако он не может служить прототипом предлагаемого способа, т.к. понтоны не имеют устройств регулирования плавучести, движительного комплекса, систем автоматического наведения на цель и захватных устройств и предназначены для подъема затонувших кораблей, поддержания на плаву кораблей, частично потерявших плавучесть, уменьшения осадки и т.п. (Справочник специалиста аварийно-спасательной службы ВМФ, часть IV, Воениздат, М., 1967 г.)
Акватории арктических морей являются регионами, в которых 9-10 месяцев в году ледовые условия и штормовые ветра затрудняют или делают вообще невозможной работу надводных судов по монтажу элементов обустройства морских месторождений.
Подводных судов, оснащенных для выполнения вышеуказанных работ, мировая практика морских работ не имеет.
Предлагаемый способ позволяет перенести выполняемые операции подъема, перемещения и монтажа объектов обустройства морских арктических месторождений в подводно-подледное положение.
При этом в основу операции положен принцип использования регулируемой плавучести подводного сооружения - подводной грузоподъемной самоходной платформы (ПГСП).
Аналогов подобным подводным сооружениям не имеется.
Конструктивно ПГСП состоит из 3-х прочных корпусов цилиндрической формы, связанных между собой.
Два крайних корпуса 1 (фиг.1) обеспечивают изменение плавучести сооружения, в них расположены прочные уравнительные цистерны.
В среднем корпусе 2 расположено оборудование, обеспечивающее заполнение и осушение уравнительных цистерн, управление перемещением сооружения, автоматическую посадку сооружения, зацепление и отсоединение груза, электрооборудование, обеспечивающее прием электроэнергии с носителя, аккумуляторная батарея.
Для стыковки с подводным носителем на корпусах 1 установлены штоковые устройства 3, а для захвата груза на корпусе 2 - грузовые захваты 4.
С целью обеспечения точности выхода на объект ПГСП снабжена движителями маршевого 5, лагового 6 и вертикального 7 перемещений.
Электроснабжение ПГСП и управление операциями производится по кабелю 8 с подводного носителя.
Работа системы производится следующим образом:
- надводное судно в период навигации доставляет в район работ и опускает на грунт крупногабаритный груз, после чего покидает район работ, предварительно установив на месте опускания груза гидроакустический маяк;
- подводный носитель доставляет ПГСП к месту работ;
- ПГСП отстыковывается от носителя, дифферентуется по плавучести и по сигналу маяка выходит к месту расположения груза;
- ПГСП располагается над грузом и закрепляет захваты;
- откачивая воду из уравнительных цистерн, ПГСП создает положительную плавучесть, приподнимает груз, перемещает его в заданное место установки, при этом используются системы автоматического наведения на цель и посадки;
- на месте установки положительная плавучесть гасится приемом забортной воды в уравнительные цистерны, и груз устанавливается на заданное место;
- отдаются грузовые захваты;
ПГСП дифферентуется по плавучести с помощью насосов и возвращается к носителю.
Все операции проводятся под контролем необитаемых подводных аппаратов, выпускаемых с носителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВАЯ ПОДВОДНАЯ СТАНЦИЯ (МПС) | 2010 |
|
RU2436705C1 |
| ПОДВОДНЫЙ МОДУЛЬ ДЛЯ ПРОИЗВОДСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2016 |
|
RU2608843C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| СПОСОБ ОБУСТРОЙСТВА МОРСКИХ ГЛУБОКОВОДНЫХ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2013 |
|
RU2547161C2 |
| ПОДВОДНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2462388C2 |
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ И ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388022C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ НЕГАБАРИТНЫХ ПОДВОДНЫХ ОБЪЕКТОВ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500569C2 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| УНИВЕРСАЛЬНОЕ ПОДВОДНОЕ СООРУЖЕНИЕ "АПЕЛЬСИН" ДЛЯ БУРЕНИЯ СКВАЖИН НА НЕФТЬ/ГАЗ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2012 |
|
RU2515657C1 |
Изобретение относится к области освоения минеральных ресурсов арктического шельфа. Способ подъема, перемещения и монтажа объектов обустройства арктических морских месторождений углеводородов в подводно-подледном положении, при котором подъем, перемещение и монтаж производят с использованием сил плавучести. Используют подводную грузоподъемную самоходную платформу, снабженную прочными уравнительными цистернами, заполняемыми и осушаемыми насосами, движителями маршевого, лагового и вертикального перемещения, системами автоматического наведения на цель и автоматической посадки. Для стыковки с подводным носителем подводная грузоподъемная самоходная платформа снабжена штоковым устройством, для стыковки с перемещаемым объектом оснащена грузовыми захватами. Электроснабжение и управление операциями подъема, перемещения и монтажа производится по кабелю с подводного носителя. Все операции проводят под контролем необитаемых подводных аппаратов, выпускаемых с носителя. Обеспечивается возможность подводного монтажа элементов обустройства морских месторождений в суровых ледовых и климатических условиях. 3 ил.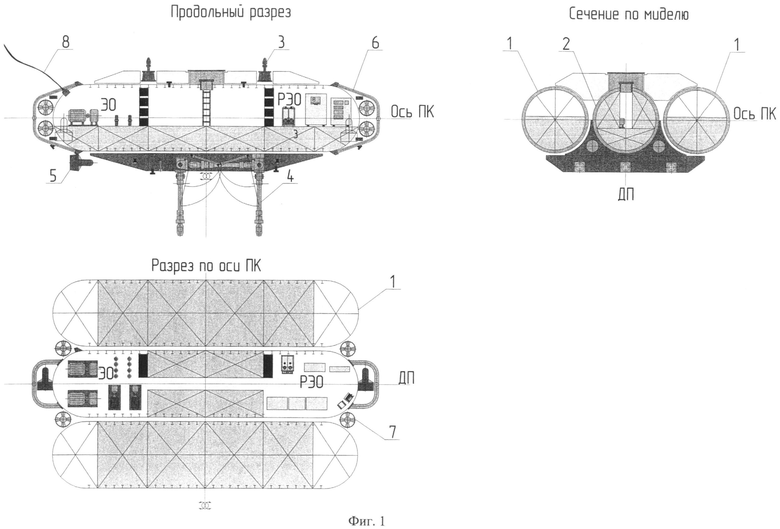
Способ подъема, перемещения и монтажа объектов обустройства арктических морских месторождений углеводородов в подводно-подледном положении, при котором подъем, перемещение и монтаж производят с использованием сил плавучести, отличающийся тем, что для достижения указанных целей используют подводную грузоподъемную самоходную платформу, снабженную прочными уравнительными цистернами, заполняемыми и осушаемыми насосами, движителями маршевого, лагового и вертикального перемещения, системами автоматического наведения на цель и автоматической посадки, при этом для стыковки с подводным носителем подводная грузоподъемная самоходная платформа снабжена штоковым устройством, для стыковки с перемещаемым объектом оснащена грузовыми захватами, а электроснабжение и управление операциями подъема, перемещения и монтажа производится по кабелю с подводного носителя, все операции проводят под контролем необитаемых подводных аппаратов, выпускаемых с носителя.
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238876C2 |
| СПОСОБ ПОДЪЕМА В УСЛОВИЯХ МОРСКОГО ВОЛНЕНИЯ ОБЪЕКТОВ, РАСПОЛОЖЕННЫХ НА ДНЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2424152C1 |
| US 3541986 A, 24.11.1970 | |||
| Устройство для подъема затонувших объектов | 1990 |
|
SU1804408A3 |

