Изобретение относится к области судостроения и касается вопросов создания способа и технических средств для осуществления в условиях морского волнения подъемных операций с объектами, расположенными на дне, в том числе с затонувшими подводными лодками (ПЛ), и транспортировки этих объектов в назначенный пункт.
Известен способ и комплекс технических средств для подъема затонувших морских объектов, который впервые был применен для подъема затонувшей ПЛ. Способ основан на использовании двух видов сил. Сила плавучести платформы используется для отрыва, подъема и поддержания во взвешенном состоянии поднимаемого объекта. Сила реакции донного грунта, используемого в качестве опоры для покоящегося объекта, используется для фиксации положения объекта, которое достигается после его подъема на некоторую ограниченную высоту. Поочередный перенос веса объекта на плавучее основание и на донный грунт обеспечивает шаговое перемещение объекта вверх и в направлении убывания глубины (В.А. Молчанов, «Возвращение из глубины», Л., «Судостроение», с.156).
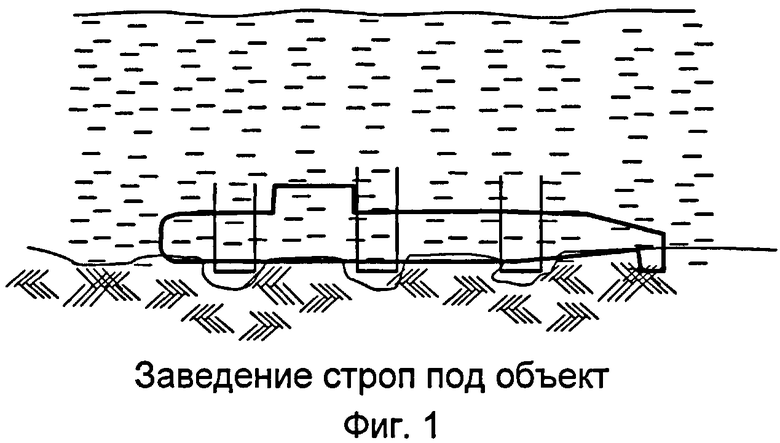
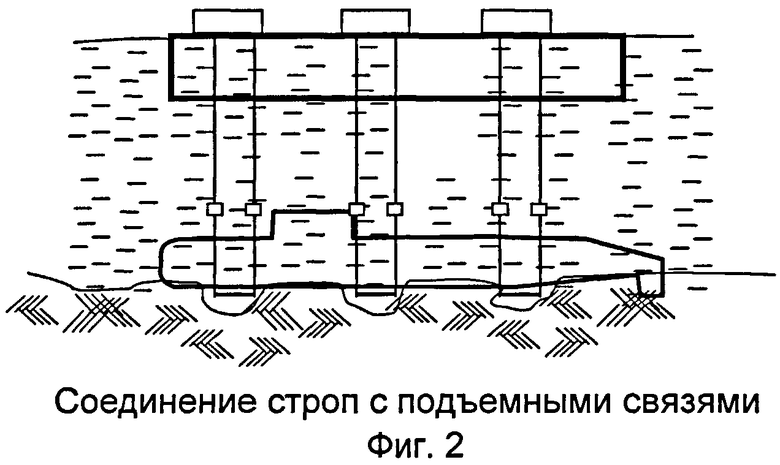
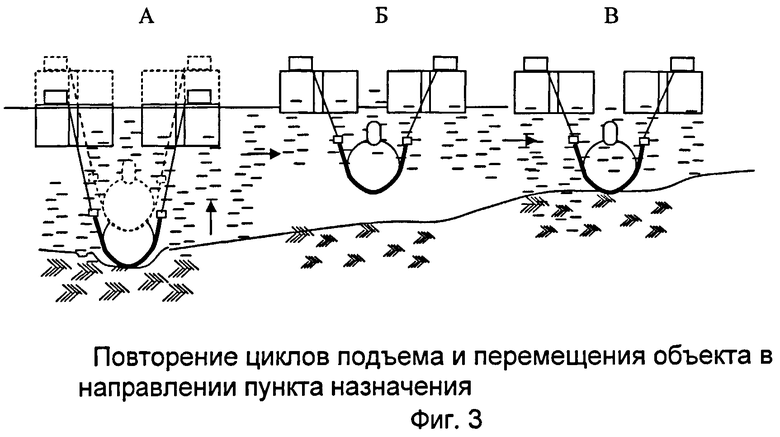
В известном способе для отрыва и подъема объекта над грунтом используют плавучую платформу с отсеками и устройствами для загрузки и выгрузки балласта. В качестве балласта используют забортную воду. Загрузку балласта производят через кингстоны платформы, выгрузку осуществляют путем вытеснения воды из цистерн сжатым воздухом или откачки с помощью насосов. Платформу оснащают гибкими подъемными связями (цепями, тросами и т.п.) и средствами их подъема, спуска и жесткого закрепления связей на платформе (Фиг.1, 2, 3). Перед подъемом под объект заводят подъемные стропы, так чтобы они охватывали поперечное сечение объекта целиком, проходя в грунте по границе контакта с объектом. Далее, когда в состоянии максимальной загрузки балластом платформа располагается над объектом, стропы соединяют с подъемными связями. После этого выбирают слабину и жестко закрепляют подъемные связи на платформе. Разгружая платформу от балласта, прикладывают к объекту подъемную силу и переводят его во взвешенное состояние, поднимая его на высоту, равную разности между осадкой платформы при полной балластной нагрузке и осадкой под действием веса объекта соответственно при выгруженном балласте. После отрыва и подъема объект вместе с платформой перемещают ближе к месту назначения объекта в направлении уменьшения глубины вплоть до касания объекта с донным грунтом. Затем переносят вес объекта на грунт, вновь переводя платформу в состоянии максимальной загрузки балластом. После приема балласта на более мелком месте при максимальной осадке платформы подъемные связи приобретают слабину, которую в случае необходимости дальнейшего движения вновь выбирают и затем повторяют указанные операции вплоть до касания с грунтом в месте назначения объекта (Фиг.3).
Указанные способ и комплекс технических средств имеют ряд недостатков, основные из которых состоят в следующем.
- Процессы подъема и транспортировки в этом случае не могут быть разделены в принципе.
- Ход выполнения подъемно-транспортной операции, помимо всего прочего, существенно зависит от профиля морского дна в области, охватывающей место проведения операции и место назначения объекта.
- Способ предполагает многократную покладку объекта на грунт в различных местах акватории, поэтому на параметры технических средств и технологии в целом существенно влияют свойства донного грунта по маршруту следования объекта. Этот фактор принципиально неустраним, поэтому техническая реализация способа априори предполагает усложнение и удорожание подъемной операции за счет привлечения дополнительных технических средств, нейтрализующих его.
- Использование для подъема охватывающих подъемных строп увеличивает продолжительность, риски и стоимость выполнения подъемной операции также за счет привлечения дополнительных технических средств. Например, для установки подъемных строп способом протаскивания тросов-проводников («подрезка») необходимо как минимум два буксирных судна и водолазный комплекс или осмотровый подводный аппарат для контроля положения проводников относительно корпуса объекта. Если «подрезка» невозможна, например, из-за выступающих частей на корпусе объекта, погруженных в грунт, или из-за недоступности объекта для водолазов, необходимо использовать глубоководные аппараты, средства ведения подводных земляных и проходческих работ и т.п. Сложность и трудоемкость заведения строп существенно увеличиваются с ростом глубины.
- Жесткое закрепление подъемных связей на плавучей платформе приводит к тому, что колебательные движения системы «платформа - объект» при волнении моря и неравновесный процесс отрыва объекта от грунта в начале каждого цикла подъема приводят к дополнительным нагрузкам на подъемные связи. При этом суммарное растяжение связей может весьма существенно превышать значения, отвечающие статическому равновесию объекта в подвешенном состоянии. Жесткость закрепления может приводить к перенапряжению связей также на стадии отрыва объекта от грунта. «Отрывной вес» объекта может существенно превышать его собственный вес в воде. Известно, что при первой же попытке реализации способа произошел к обрыв подъемных связей.
- Большая продолжительность подготовительных работ и подъемно-транспортной операции в целом увеличивает риск выхода параметров волнения моря за жестко ограниченные допустимые пределы. Обеспечение безопасности в этом случае возможно лишь за счет прерывания подъема и принятия необходимых мер безопасности, вплоть до отсоединения подъемного комплекса от подъемных строп и перехода платформы в безопасный район.
- Эффективность способа убывает пропорционально произведению глубины операции и массы объекта. В частности, увеличение массы объекта непосредственно в прямой пропорции уменьшает шаг подъема по высоте. Соответственно, увеличивается общее число шагов процесса, что в прямой пропорции увеличивает затраты энергии и времени на перекачку балласта и т.д. Дополнительное снижение эффективности способа обусловлено увеличением веса грузонесущей системы - подъемных связей и захватных устройств, по мере увеличения глубины моря и массы объекта. Увеличение массы грузонесущей системы также уменьшает шаг подъема.
- Увеличение числа промежуточных покладок объекта на грунт и/или их продолжительности увеличивает риски подъемно-транспортной операции, за счет суммирования вкладов в общий риск, рисков, обусловленных каждой покладкой, и/или в результате увеличения импульса неуравновешенных сил в процессе преодоления присоса, величина которых зависит от времени контакта объекта с грунтом.
Задачей предлагаемого изобретения является обеспечение безопасности подъема подводных объектов в условиях морского волнения, сокращение временных затрат и увеличение эффективности подъемных операций, уменьшение трудозатрат и исключение необходимости применения технологий, связанных с непосредственным взаимодействием подъемных связей с донным грунтом, а также расширение области допустимых параметров волнения моря при проведении подъемной операции.
Для достижения указанного технического результата в известном способе подъема в морских условиях объектов, расположенных на дне, при котором используют плавающую платформу с отсеками и устройствами для загрузки и выгрузки балласта и оснащенную средствами подъема, включающими подъемные связи и устройства для их функционирования, которую в состоянии максимальной загрузки балластом располагают над объектом и при помощи подъемных связей соединяют с ним и, выбирая слабину связей, жестко закрепляют их на платформе, а затем, разгружая платформу от балласта, переводят объект во взвешенное состояние, поднимая его на высоту, равную разности между осадкой платформы при полной балластной нагрузке и осадкой под действием веса объекта, но при полностью выгруженном балласте, и перемещают платформу вместе с объектом ближе к месту назначения объекта в направлении уменьшения глубины моря до касания объекта с донным грунтом, после чего платформу вновь переводят в состояние максимальной загрузки балластом и повторяют указанные операции и весь указанный цикл вплоть до касания объекта с грунтом в месте назначения объекта, соединение подъемных связей с объектом осуществляют через прочные элементы силового набора корпуса объекта, расположенные преимущественно в верхней его части, а силу натяжения каждой подъемной связи на всех стадиях движения объекта настраивают и стабилизируют с помощью пневматических устройств на величину, необходимую для сохранения устойчивого равновесия и пространственного положения объекта независимо от параметров волнения водной поверхности.
В комплексе для осуществления в условиях морского волнения подъема объектов, расположенных на дне, включающем плавучую платформу с отсеками и устройствами для загрузки и выгрузки балласта, преимущественно жидкого, подъемные связи и устройства подъема, спуска, натяжения и прочной фиксации подъемных связей, по изобретению платформа оснащена датчиками скорости, крена и дифферента и регулируемыми источниками сжатого газа с управляемым запорным клапаном и пневмогидравлическим устройством, а в ее корпусе выполняют, по меньшей мере, один сквозной вертикальный проем удлиненной формы, ориентированный по диаметральной плоскости платформы, относительно плоскости симметрии которых размещают устройства подъема, которые выполнены в виде отдельных модулей, установленных на горизонтальных направляющих с возможностью перемещения модулей по ним, при этом модули имеют в своем корпусе вертикальную шахту, расположенную внутри проема, ось которой лежит в плоскости симметрии проема, при этом в нижней части шахты установлен ограничитель боковых смещений подъемной связи и распорные устройства, а в верхней части расположен пневматический цилиндр с поршнем, имеющим шток, на нижнем конце которого закреплен фиксатор подъемной связи с гидравлическим зажимом, установленный внутри шахты с возможностью скольжения, при этом в шахте над фиксатором подъемной связи и под ним установлены поглотители энергии удара фиксатора о корпус поглотителя, причем пневматический цилиндр оснащен датчиком положения поршня, а его полости над и под поршнем сообщены через управляемые клапаны с окружающей атмосферой и далее через запорный клапан - с источником сжатого газа, причем пневмогидравлическое устройство связано с одной стороны с гидравлическим зажимом фиксатора подъемной связи, а с другой, через клапан, управляемый по сигналам датчиков скорости, крена и дифферента, и через управляемый запорный клапан - с источником сжатого газа, при этом подъемная связь модулей имеет на нижнем конце захватное устройство, а ее верхний конец пропущен через устройство подъема, спуска, натяжения и фиксации подъемной связи, которым оснащены подъемные модули.
Кроме того, подъемные модули оснащены резервуаром с унитарным топливом, преимущественно с гидразином. Резервуар разделен плавающей перегородкой на две полости, верхняя из которых сообщена с источником сжатого газа, а нижняя, через дозатор, управляемый по сигналам датчика положения поршня, сообщена с полостью пневматического цилиндра, расположенной под поршнем. Поршень оснащен предохранительным клапаном, сообщающим верхнюю и нижнюю полость цилиндра.
При этом для повышения надежности подъемного комплекса и расширения допустимого диапазона амплитуды колебаний платформы при волнении моря у подъемного комплекса его подъемные модули дополнены промежуточной гибкой связью, соединенной с фиксатором подъемной связи, другой конец которой закреплен на корпусе подъемного модуля, а тело промежуточной гибкой связи опирается при этом на ролики, которыми оснащен подъемный модуль, и, по меньшей мере, один ролик через цилиндрический шарнир опирается на шток поршня пневматического цилиндра.
Преимущества, которые обеспечивает новый комплекс, в основном состоят в следующем.
- Оснащение платформы датчиками скорости, крена и дифферента позволяет оптимально выбрать момент фиксации подъемных связей, когда углы крена и дифферента имеют минимальные значения.
- Наличие в корпусе сквозных проемов и модульное построение подъемного комплекса обеспечивают возможность оптимального расположения подъемных модулей по длине платформы в соответствии с распределением весовой нагрузки от объекта, что позволяет минимизировать статическую составляющую нагрузки, действующей на подъемные модули, связи и элементы корпуса объекта и т.д.
- Оснащение подъемных модулей пневматическими устройствами позволяет минимизировать динамическую составляющую нагрузки на подъемные модули, связи и элементы корпуса объекта и т.д.
- Оснащение пневматических цилиндров датчиками положения поршня позволяет оптимальным образом выбрать начальный момент и интенсивность увеличения натяжения при активации подъемных связей при отрыве объекта от грунта в стадии перехода объекта из состояния покоя во взвешенное состояние в каждом цикле подъема.
- Оснащение подъемных модулей поглотителями энергии удара позволяет снизить риск разрушения подъемных связей при внезапном выходе колебаний системы «платформа - объект» за пределы допустимого диапазона.
- Использование регулируемых источников сжатого газа позволяет настраивать усилия натяжения связей на всех стадиях движения объекта в процессе подъемно-транспортной операции и т.д.
- Оснащение подъемного модуля резервуаром с унитарным топливом-энергоносителем позволяет, путем каталитического разложения топлива, создать импульс давления в нижней полости цилиндра, при возникновении угрозы соударения поршня с нижней стенкой пневматического цилиндра.
- Сообщение верхней полости резервуара с источником сжатого газа позволяет создать в резервуаре давление, необходимое для работы дозатора и впрыска топлива в нижнюю полость цилиндра.
- Оснащение пневматического цилиндра датчиком перемещения поршня обеспечивает необходимые данные для своевременного срабатывания дозатора предохранительного клапана поршня.
- Установка на поршне предохранительного клапана позволяет не допустить минимизирование импульса последействия давления продуктов разложения топлива и рывка подъемной связи при обратном ходе поршня из его крайнего нижнего положения после срабатывания компенсирующего импульса давления.
- Оснащение подъемного модуля промежуточной гибкой связь и роликами позволяет существенно увеличивать ход фиксатора подъемной связи при том же ходе штока поршня. Это позволяет существенно увеличить амплитуду допустимых вертикальных перемещений платформы при качке и тем самым расширить область параметров и временной интервал безопасного проведения подъемно-транспортных операций. В случае необходимости, дополнительное увеличение безопасного хода фиксатора может быть достигнуто увеличением количества роликов на подвижных опорах в составе подъемного модуля. При использовании одного подвижного ролика и соответственно одного пневматического цилиндра рабочий ход фиксатора можно увеличить в 2 раза, при двух подвижных роликах - 4, при трех - в 8 раз и т.д. При использовании такого механизма критичным, с точки зрения условий подъемной операции, становится не волнение моря, а другие факторы, например скорость ветра и другие метеорологические условия на акватории.
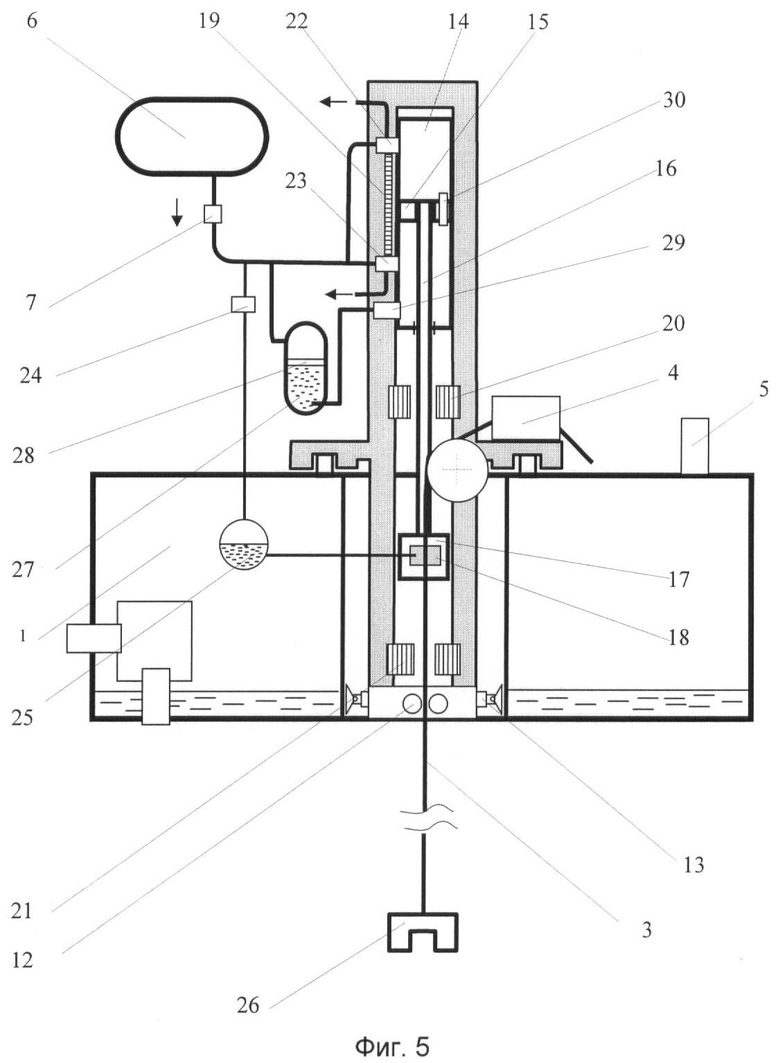
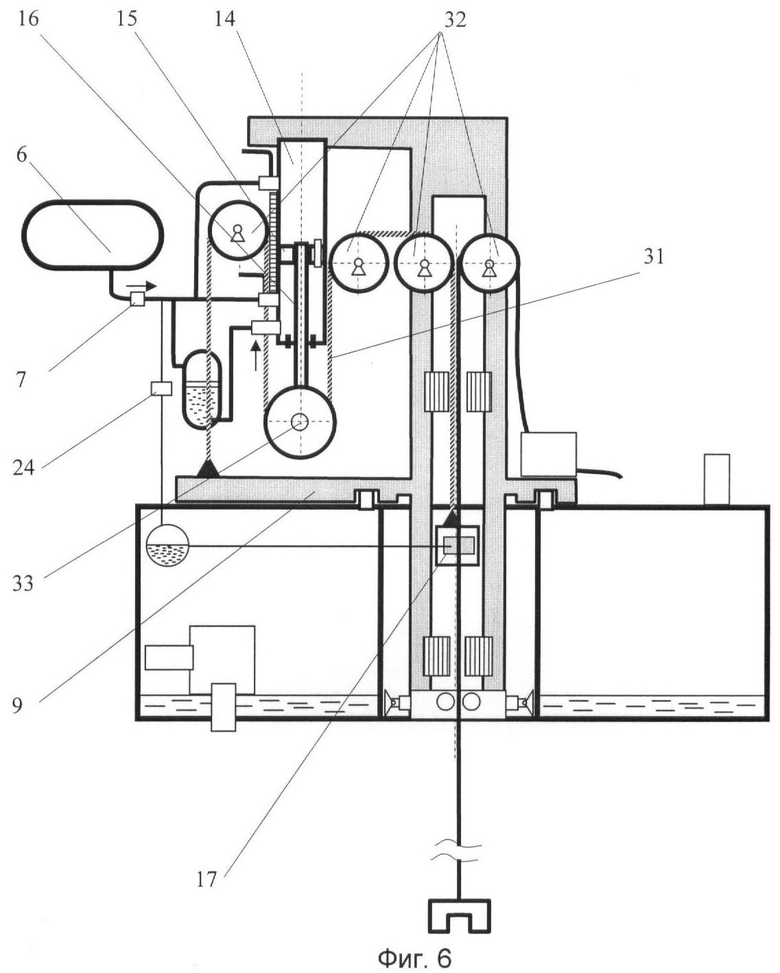
Сущность изобретения поясняется чертежами, где на Фиг.4 представлен общий вид комплекса для осуществления способа подъема в условиях морского волнения объектов, расположенных на дне моря, на Фиг.5 - общий вид указанного комплекса (Фиг.4), оснащенного резервуаром с унитарным топливом, на Фиг.6 - общий вид комплекса (Фиг.4, 5) - с промежуточной гибкой связью, и на Фиг.7 - схема подъема по предлагаемому изобретению.
Комплекс для осуществления в условиях морского волнения подъема объектов, расположенных на дне (Фиг.4), состоит из плавучей платформы 1 с отсеками и устройствами для загрузки и выгрузки балласта 2, подъемных связей 3 и устройства подъема, спуска, натяжения и прочной фиксации подъемных связей 4. Платформа 1 оснащена датчиками скорости, крена и дифферента 5 и регулируемыми источниками сжатого газа 6 с управляемыми запорными клапанами 7. Подача и регулирование давления в источники 6 могут быть осуществлены различными способами, например с помощью компрессорной станции, расположенной на платформе, или с помощью резервуаров со сжатым газом (на чертеже не показаны).
В корпусе платформы выполнен, по меньшей мере, один сквозной вертикальный проем 8. Относительно плоскости симметрии проема размещены подъемные модули 9, которые установлены с возможностью перемещения на горизонтальных направляющих 10. Модули имеют в своем корпусе вертикальную шахту 11, в нижней части которой установлен ограничитель боковых смещений подъемной связи 12 и распорные устройства 13 (для фиксации положения модулей внутри проема 8). В верхней части шахты расположен пневматический цилиндр 14 с поршнем 15, имеющим шток 16. На нижнем конце штока закреплен фиксатор подъемной связи 17 с гидравлическим зажимом 18. Фиксатор 17 установлен внутри шахты 11 с возможностью скольжения. Пневматический цилиндр также оснащен датчиком положения поршня 19. В шахте над фиксатором подъемной связи и под ним установлены поглотители энергии удара 20 и 21. Полости пневматического цилиндра над и под поршнем сообщены через запорный клапан 7 источника сжатого газа и управляемые клапаны 22 и 23 с источником сжатого газа 6. Устройство клапанов 22 и 23 позволяет сообщать соответствующие полости с окружающей атмосферой. Параллельно клапанам 22 и 23 источник сжатого газа 6 через запорный клапан 7, трубопровод и клапан 24 (управляемый по сигналам датчиков 5) соединен с установленным на корпусе подъемного модуля пневмогидравлическим устройством 25, которое, с другой стороны, соединено с гидравлическим зажимом фиксатора подъемной связи 18. На нижнем конце связи 3 подъемных модулей закреплено захватное устройство 26, при этом верхний конец подъемной связи пропущен через устройство подъема, спуска, натяжения и фиксации связи 4.
Кроме того, в указанном комплексе (см. Фиг.5) подъемные модули оснащены резервуаром с унитарным топливом (например, гидразином) 27. Резервуар разделен плавающей перегородкой 28 на две полости, верхняя из которых сообщена с источником сжатого газа 6, а нижняя сообщена через дозатор 29 с полостью пневматического цилиндра 14, расположенной под поршнем 15. Датчик положения 19 поршня 15 соединен с дозатором 29. Поршень 15 оснащен автоматическим предохранительным клапаном 30, через который нижняя полость пневматического цилиндра может сообщаться с его верхней полостью (и через клапан 22 - с окружающей атмосферой).
Наряду с этим подъемный комплекс (Фиг.6) оснащен промежуточной гибкой связью 31, к одному концу которой прикреплен фиксатор подъемной связи 17, а другой конец закреплен на корпусе 9 подъемного модуля 9. Промежуточная связь 31 пропущена через ролики 32. Ось, по меньше мере, одного ролика через цилиндрический шарнир 33 оперта на шток 16 поршня 15 пневматического цилиндра 14.
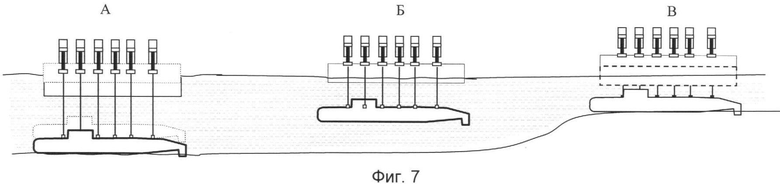
В предлагаемом способе при подъеме подводного объекта стадии заведения подъемных строп и соединения их с подъемными связями 3 (Фиг.4) объединены в одной стадии (Фиг.7) установки на конструкциях объекта присоединяемых захватов, которые через подъемные связи 3 и пневматические устройства передают подъемное усилие на корпус платформы. Каждый цикл подъема осуществляется в три операции (Фиг.7): отрыв объекта от грунта - А; перемещение объекта в направлении пункта назначения до касания с грунтом - Б; ослабление натяжения связей в точке касания объекта с грунтом до величины, обеспечивающей нормальное функционирование механизмов фиксации и выборки слабины подъемных связей - В. Цикл (А-Б-В) повторяется вплоть до касания объекта с грунтом в пункте назначения.
Функционирование подъемного комплекса осуществляется следующим образом (см. Фиг.4).
На основании расчета сил, обеспечивающих статическое равновесие, и с учетом допустимых нагрузок на прочные элементы корпуса объекта, к которым будут приложены подъемные усилия, определяется давление в полостях пневмоцилинров и положение подъемных модулей вдоль плоскости симметрии проемов 8 в корпусе платформы 1.
Перемещая подъемные модули 9 по направляющим 10, модули устанавливают на платформе и фиксируются на своих местах с помощью распорных устройств 13.
С учетом веса объекта, водоизмещения платформы, прогнозируемой амплитуды колебаний платформы и других существенных факторов устанавливают в требуемое положение поглотители энергии удара 20 и 21.
Доставляют платформу к месту проведения операции.
С помощью устройств балластировки 2 платформу переводят в состояние максимальной осадки и располагают над объектом.
Создают необходимое давление в источниках сжатого газа 6.
При раскрытых гидравлических зажимах 18 опускают подъемные связи 3 с захватными устройствами 26 и закрепляют их на прочных элементах корпуса объекта (которые были назначены заранее на стадии инженерной подготовки операции).
Открывают запорный клапан 7 и клапаны 22 и 23 и заполняют сжатым газом верхнюю и нижнюю полости цилиндра 14. При этом сжатый газ может свободно перемещаться между полостями. Клапан 24 на трубопроводе, подающем газ в пневмогидравлическое устройство 25, закрыт.
Выбирают слабину подъемных связей с помощью устройства подъема, спуска, натяжения и фиксации 4 и поддерживают это состояние (например, с помощью противовеса, входящего с состав устройства 4 (на Фиг.4 не показан)).
По показаниям датчиков 5 выбирают момент времени, когда значения углов крена и дифферента платформы имеют минимальное значение, и, одновременно на всех подъемных модулях, открывают клапан 24, приводят в действие пневмогидравлическое устройство 25 и гидравлические зажимы 21 фиксатора подъемных связей 17, с помощью клапана 22 разобщают полости цилиндра над и под поршнем и сбрасывают часть газа из верхней полости цилиндра в атмосферу, снижая давление газа в верхней полости цилиндра до величины, обеспечивающей натяжение подъемных связей (избыточным давлением в нижней полости). При этом создают натяжение связей, достаточное лишь для преодоления сил трения между цилиндром и поршнем со штоком и поддержания связей в натянутом состоянии при качке платформы. Включение штоков и поршней подъемных модулей приводит к изменению параметров колебания платформы.
На основании наблюдений параметров движения платформы (крена, дифферента и скорости) определяют момент завершения перехода платформы в новый режим колебаний. В момент оптимального сочетания углов крена и дифферента, а также направления и величины скорости вертикального движения платформы, на всех подъемных модулях клапан 22 устанавливают в положение, обеспечивающее постепенный сброс давления из верхней полости цилиндров 14. Одновременно с помощью устройств 2 производят разгрузку балласта из отсеков платформы. Сброс давления из верхних полостей пневматических цилиндров производят до тех пор, пока давление в нижней полости цилиндров всех подъемных модулей не создаст натяжение связей, соответствующее условиям равновесия объекта в подвешенном состоянии.
Если, после завершения дебалластировки, в течение приемлемого по условиям операции времени не происходит отрыва объекта от грунта, то для преодоления сил отрыва давление в источниках сжатого газа 6 всех подъемных модулей (одновременно или по заранее принятому алгоритму) увеличивается на некоторую величину. Увеличение давления производят ступенями с выдержкой на каждой ступени в течение некоторого времени.
В момент начала отрыва, по мере перехода объекта из состояния покоя во взвешенное состояние, для уменьшения натяжения подъемных связей клапаны 22 устанавливаются в положение, обеспечивающее сброс сжатого газа из нижней полости цилиндров в верхнюю. Натяжение подъемных связей, таким образом, доводят до расчетного, отвечающего статическому равновесию объекта в подвешенном состоянии. Если в процессе отрыва, из-за колебаний системы «платформа - объект», объект вновь пришел в соприкосновение с грунтом и усилие, необходимое для перевода объекта во взвешенное состояние, вновь увеличилось, клапан 22 вновь переводят в состояние, обеспечивающее сброс газа в атмосферу из верхней полости, тем самым понижая давление в верхней полости цилиндра и увеличивая натяжение подъемных связей. При всех этих действиях нижняя полость постоянно сообщается с источником 6 сжатого газа, что обеспечивает минимизацию динамической составляющей натяжения подъемных связей.
После полного завершения отрыва объекта от грунта и освобождения платформы от балласта система «платформа - объект» приобретает минимально возможную осадку и в таком состоянии транспортируется в направлении уменьшения глубины, которое должно максимально совпадать с направлением на место назначения объекта.
После касания объекта с грунтом на более мелком месте с помощью устройств 2 платформу вновь загружают балластом. Одновременно закрывают запорный клапан 7, через клапан 23 сообщают нижнюю полость цилиндра с атмосферой, а после выравнивания давления в нижней и верхней полостях цилиндров открывают клапан 22 и сбрасывают давление газа в обеих полостях цилиндров на всех подъемных модулях.
Открывают гидравлические зажимы 18 всех подъемных модулей и приводят в действие механизмы 4 для сохранения натяжения подъемных связей без слабины.
После полной разгрузки подъемных связей и производят балластировку платформы.
При максимальной осадке платформы с помощью устройства 25 закрывают гидравлические зажимы 18 и повторяют все действия, следующие после этого, описанные выше.
Отличия параметров операций на следующем цикле главным образом связаны с изменениями морского волнения и условиями взаимодействия объекта с грунтом.
Подъемный комплекс по п.3 формулы изобретения функционирует по описанному выше алгоритму, но имеет следующие отличия.
В момент открытия запорного клапана 7 (см. Фиг.5) сжатый газ попадает в верхнюю полость резервуара с унитарным топливом 27. При этом топливо, находящееся в нижней полости резервуара и трубопроводе, заканчивающемся дозатором 29, находится под давлением, равным давлению в нижней полости пневматического цилиндра на каждом подъемном модуле.
В случае опасного сближения поршня с нижней стенкой пневматического цилиндра, по сигналу от датчика положения поршня 19 дозатор 29 (например, с помощью гидроусилителя, который может быть включен в состав дозатора) производит впрыск топлива в полость цилиндра под поршнем. Быстрое экзотермическое разложение топлива приводит к возникновению дополнительного импульса давления, препятствующего движению поршня вниз. При соударении чувствительного элемента предохранительного клапана (на чертеже не показан) с нижней стенкой цилиндра предохранительный клапан открывается и в момент максимального давления под поршнем происходит сброс давления из нижней полости цилиндра в верхнюю. Откуда он через клапан 22 выходит в атмосферу.
Если компенсирующее воздействие импульса давления продуктов разложения топлива оказалось избыточным и срабатывание клапана 30 не произошло, предохранительный клапан срабатывает по сигналу датчика 19 в момент изменения знака изменения положения поршня на противоположный, что соответствует движению поршня вверх. Сброс продуктов разложения в верхнюю полость пневматического цилиндра приводит к быстрому уменьшению натяжения подъемной связи. Приведение значения натяжения связи к расчетному значению происходит с помощью клапана 22 аналогично тому, как это происходит на стадии отрыва объекта от грунта (см. выше).
Если компенсирующее воздействие импульса давления продуктов разложения топлива оказалось недостаточным и, соответственно, торможение поршня оказалось неполным, остаточную энергию удара воспринимает поглотитель энергии удара 21 (см. Фиг.4). При этом в момент касания чувствительного элемента предохранительного клапана 32 с нижней стенкой пневматического цилиндра происходит сброс давления из нижней полости цилиндра и возврат давления в ней к расчетному происходит с помощью клапана 22 (см. выше).
Подъемный комплекс по п.4 формулы изобретения (см. Фиг.6) функционирует так же, как и комплексы по п.2 или 3 формулы изобретения. Отличие функционирования комплекса по п.4 состоит в том, что шток 16 пневматического цилиндра 14 взаимодействует с фиксатором подъемной связи 17 не непосредственно, а через промежуточную гибкую связь 31, пропущенную через систему жестко закрепленных на корпусе подъемного модуля роликов 32. При этом, по крайней мере, один из роликов через цилиндрический шарнир 33 опирается на шток 16 поршня 15.
Особенность функционирования комплекса по п.4 формулы изобретения состоит в том, что при той же амплитуде перемещения поршня 15 допустимое перемещение фиксатора подъемной связи 17 может быть увеличено, по меньшей мере, в два раза по сравнению с вариантом подъемного модуля по п.2 формулы изобретения.
Увеличивая количество подвижных роликов и соответственно пневматических цилиндров до 2, 3 и т.д., можно увеличить допустимые перемещения фиксаторов подъемных связей и допустимую амплитуду колебаний платформы соответственно в 4, 6 и т.д. раз. Это позволяет существенно уменьшить объем цилиндров 14 по отношению к объему источника сжатого газа 6 и тем самым повысить степень амортизации динамических нагрузок на подъемные связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКОЕ ГРУЗОВОЕ СУДНО ДЛЯ ПОДЪЕМА, ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ ЗАТОНУВШИХ ОБЪЕКТОВ В ПУНКТ ПРИЕМА | 2008 |
|
RU2377155C1 |
| ВОЛНОСТОЙКАЯ МОРСКАЯ ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА (ВМГП) | 2014 |
|
RU2561491C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ ОПЕРАЦИИ И ПОДВОДНОЕ СУДНО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478517C2 |
| КОРПУС ПОДВОДНОГО КОМПЛЕКСА ДЛЯ ОСВОЕНИЯ МОРСКИХ И ОКЕАНИЧЕСКИХ ГЛУБИН | 1999 |
|
RU2162425C2 |
| СПОСОБ ПРОИЗВОДСТВА ПРОМЫСЛОВЫХ РАБОТ НА ГЛУБОКОВОДНОМ ШЕЛЬФЕ | 2019 |
|
RU2702470C1 |
| СИСТЕМА КОМПЛЕКСНОГО ПРОИЗВОДСТВА УГЛЕВОДОРОДНОГО ТОПЛИВА, ТЕПЛОВОЙ И ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И ПРОИЗВОДСТВА ИЗ МОРСКОЙ ВОДЫ ТОВАРНОЙ ПРЕСНОЙ И ПИТЬЕВОЙ ВОДЫ, ПОЛЕЗНЫХ ХИМИЧЕСКИХ ЭЛЕМЕНТОВ И СОЕДИНЕНИЙ НА ОСНОВЕ ПЕРЕРАБОТКИ НЕФТИ ИЛИ ГАЗОВОГО КОНДЕНСАТА ВБЛИЗИ МЕСТ ИХ ДОБЫЧИ И СНАБЖЕНИЯ ПРИБРЕЖНЫХ ДЕЦЕНТРАЛИЗОВАННЫХ ПОТРЕБИТЕЛЕЙ ПРОДУКЦИЕЙ ЭТОГО ПРОИЗВОДСТВА | 2001 |
|
RU2198111C2 |
| СПОСОБ ПРОВЕДЕНИЯ В ОПЫТОВОМ БАССЕЙНЕ ИСПЫТАНИЙ МОДЕЛЕЙ ПЛАВУЧИХ ОБЪЕКТОВ С ПРОТЯЖЕННЫМИ ЯКОРНЫМИ СИСТЕМАМИ УДЕРЖАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389996C1 |
| СПОСОБ ОБУСТРОЙСТВА МОРСКИХ ГЛУБОКОВОДНЫХ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2013 |
|
RU2547161C2 |
| Технологический комплекс для морского кустового бурения | 2019 |
|
RU2731010C1 |
Изобретение относится к области судостроения, а именно к способу и устройству для подъема в условиях морского волнения объектов, расположенных на дне. Способ подъема включает плавающую платформу, которую в состоянии максимальной загрузки балластом располагают над объектом и при помощи подъемных связей соединяют с ним. Выбирают слабину связей, жестко закрепляют их на платформе. Разгружают платформу от балласта, переводят объект во взвешенное состояние, поднимая его на высоту, равную разности между осадкой платформы при полной балластной нагрузке и осадкой под действием веса объекта, но при полностью выгруженном балласте. Перемещают платформу вместе с объектом ближе к месту назначения в направлении уменьшения глубины моря до касания объекта с донным грунтом. Операции повторяют вплоть до касания объекта с грунтом в месте назначения объекта. Комплекс для осуществления подъема включает плавучую платформу с отсеками и устройствами для загрузки и выгрузки балласта, преимущественно жидкого, подъемные связи и устройства подъема, спуска, натяжения и прочной фиксации подъемных связей. Платформа оснащена датчиками скорости, крена и дифферента и регулируемыми источниками сжатого газа. В корпусе платформы выполнен, по меньшей мере, один сквозной вертикальный проем удлиненной формы, ориентированный по диаметральной плоскости платформы. Относительно плоскости симметрии проемов размещены устройства подъема, выполненные в виде отдельных модулей с возможностью перемещения по горизонтальным направляющим. Модули имеют в своем корпусе вертикальную шахту, расположенную внутри проема платформы. Повышается надежность и безопасность подъемного комплекса. 2 н. и 2 з.п. ф-лы, 7 ил.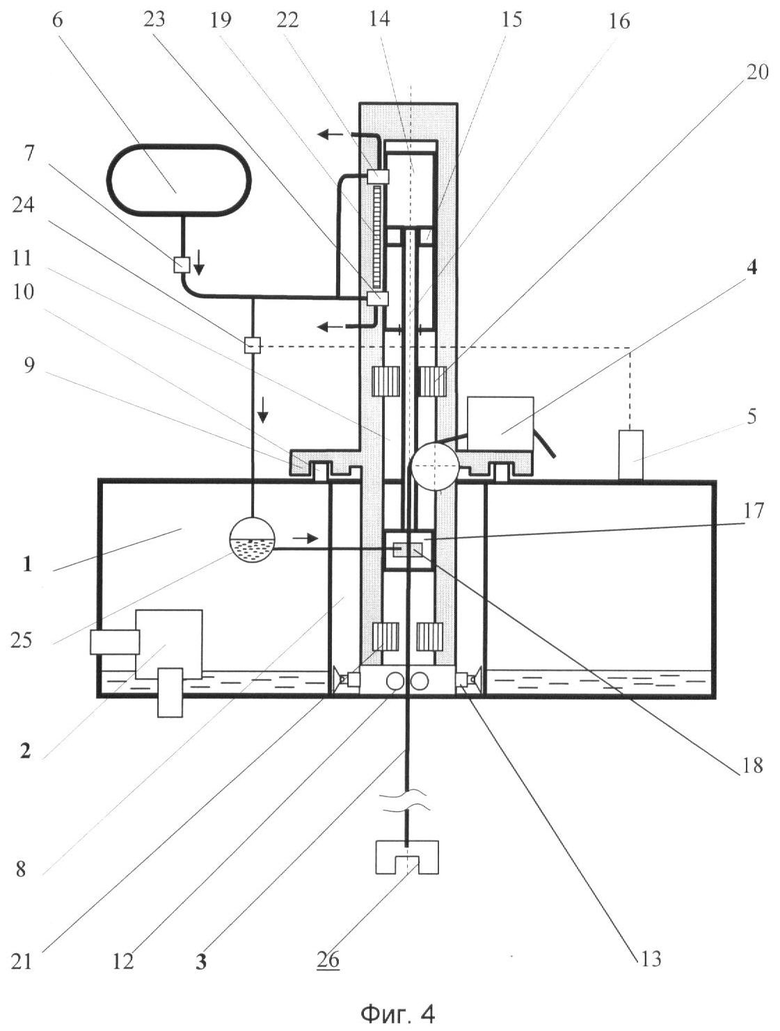
1. Способ подъема в условиях морского волнения объектов, расположенных на дне, при котором используют плавающую платформу с отсеками и устройствами для загрузки и выгрузки балласта, оснащенную средствами подъема, включающими подъемные связи и устройства для их функционирования, которую в состоянии максимальной загрузки балластом располагают над объектом и при помощи подъемных связей соединяют с ним, и, выбирая слабину связей, жестко закрепляют их на платформе, а затем, разгружая платформу от балласта, переводят объект во взвешенное состояние, поднимая его на высоту, равную разности между осадкой платформы при полной балластной нагрузке и осадкой под действием веса объекта, но при полностью выгруженном балласте, и перемещают платформу вместе с объектом ближе к месту назначения объекта в направлении уменьшения глубины моря до касания объекта с донным грунтом, после чего платформу вновь переводят в состояние максимальной загрузки балластом и повторяют указанные операции и весь указанный цикл вплоть до касания объекта с грунтом в месте назначения объекта, отличающийся тем, что соединение подъемных связей с объектом осуществляют через прочные элементы силового набора корпуса объекта, расположенные преимущественно в верхней его части, а силу натяжения каждой подъемной связи на всех стадиях движения объекта настраивают и стабилизируют с помощью пневматических устройств на величину, необходимую для сохранения устойчивого равновесия и пространственного положения объекта независимо от параметров волнения водной поверхности.
2. Комплекс для осуществления в условиях морского волнения подъема объектов, расположенных на дне, включающий плавучую платформу с отсеками и устройствами для загрузки и выгрузки балласта, преимущественно жидкого, подъемные связи и устройства подъема, спуска, натяжения и прочной фиксации подъемных связей, отличающийся тем, что платформа оснащена датчиками скорости, крена и дифферента, регулируемыми источниками сжатого газа с управляемым запорным клапаном, и пневмогидравлическим устройством, а в ее корпусе выполнен, по меньшей мере, один сквозной вертикальный проем удлиненной формы, ориентированный по диаметральной плоскости платформы, относительно плоскости симметрии которых размещены устройства подъема, которые выполнены в виде отдельных модулей, установленных на горизонтальных направляющих с возможностью перемещения модулей по ним, при этом модули имеют в своем корпусе вертикальную шахту, расположенную внутри проема, ось которой лежит в плоскости симметрии проема, при этом в нижней части шахты установлен ограничитель боковых смещений подъемной связи и распорные устройства, а в верхней части расположен пневматический цилиндр с поршнем, имеющим шток, на нижнем конце которого закреплен фиксатор подъемной связи с гидравлическим зажимом, установленный внутри шахты с возможностью скольжения, при этом в шахте над фиксатором подъемной связи и под ним установлены поглотители энергии удара фиксатора о корпус поглотителя, причем пневматический цилиндр оснащен датчиком положения поршня, а его полости над и под поршнем сообщены через управляемые клапаны с окружающей атмосферой и далее через запорный клапан с источником сжатого газа, причем пнемогидравлическое устройство связано с одной стороны с гидравлическим зажимом фиксатора подъемной связи, а с другой через клапан, управляемый по сигналам датчиков скорости, крена и дифферента и через управляемый запорный клапан - с источником сжатого газа, при этом подъемная связь модулей имеет на нижнем конце захватное устройство, а ее верхний конец пропущен через устройство подъема, спуска, натяжения и фиксации подъемной связи, которым оснащены подъемные модули.
3. Комплекс для осуществления в условиях морского волнения подъема объектов, расположенных на дне, по п.2, отличающийся тем, что подъемные модули оснащены резервуаром с унитарным топливом, преимущественно гидразином, при этом резервуар разделен плавающей перегородкой на две полости, верхняя из которых сообщена с источником сжатого газа, а нижняя через дозатор, управляемый по сигналам датчика положения поршня, сообщена с полостью пневматического цилиндра, расположенной под поршнем, а сам поршень оснащен предохранительным клапаном, сообщающим верхнюю и нижнюю полости цилиндра.
4. Комплекс для осуществления в условиях морского волнения подъема объектов, расположенных на дне, по п.2 или 3, отличающийся тем, что подъемные модули дополнены промежуточной гибкой связью, соединенной с фиксатором подъемной связи, другой конец которой закреплен на корпусе подъемного модуля, а тело промежуточной гибкой связи при этом опирается на ролики, которыми оснащен подъемный модуль, и, по меньшей мере, один ролик через цилиндрический шарнир опирается на шток поршня пневматического цилиндра.
| Молчанов В.А | |||
| Возвращение из глубины | |||
| - Л.: Судостроение, 1982, с.156 | |||
| Устройство для подъема затонувших судов | 1987 |
|
SU1439033A1 |
| МОРСКОЕ ГРУЗОВОЕ СУДНО ДЛЯ ПОДЪЕМА, ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ ЗАТОНУВШИХ ОБЪЕКТОВ В ПУНКТ ПРИЕМА | 2008 |
|
RU2377155C1 |
| US 3844237 А, 29.10.1974. | |||

