Изобретение относится к области космической техники и может быть использовано при уходе с рабочей позиции при организации перевода геостационарного космического аппарата (КА) на другую долготу стояния и увода КА с геостационарной орбиты (ГСО) на орбиту захоронения (ОЗ). Решение такой технической задачи является работой, отвечающей техническим требованиям к КА.
Технической проблемой при эксплуатации КА на ГСО является обеспечение нахождения этого КА в состоянии коллокации со смежными (сторонними) КА (СКА) в начале процессов перевода и увода КА, пока КА на пролете еще не покинул свою и соседнюю с ней по направлению долготного дрейфа области удержания (ОУ) по долготе. Никаких технических решений на этот счет не имеется, как не имеется и решений по уходу только из своей, заданной области удержания (ЗОУ) по долготе.
Этап перевода (увода) на орбите начинается с включения двигателя коррекции (ДК).
При неорганизованном переводе (уводе), хотя и на время всего в несколько часов, может наступить рассогласованность в структуре общей безопасности КА и СКА. Сколько будет длиться уход из ЗОУ и смежной с ней ОУ по долготе значения не имеет. Рисков неблагоприятных исходов коллокации не должно быть. В настоящее время коллокация на ГСО являются частью баллистического обеспечения (БО) полета КА.
Известен способ мониторинговой коллокации на ГСО (RU 2558959 C2, МПК В64G1/10, B64G1/24). Этот способ относится к автономным способам коллокации. Согласно способу линии узлов и линии апсид орбит мониторингового КА и смежного КА поддерживают соответственно ортогональными, и сумма эксцентриситетов орбит этих двух КА должна составлять порядка 0,0004.
Способ не удовлетворяет требованию коллокации при нахождении в ЗОУ более двух КА. При высокой плотности заселения ГСО такая ситуация вполне вероятна.
Из уровня техники известен способ коллокации разнесением двух КА по гринвичской долготе, который можно отнести к способам автономной коллокации. С помощью двигателей малой тяги проводят коррекции удержания КА по гринвичской долготе, эксцентриситету и широте (наклонению). Достоинством способа является (при существовании буферной зоны порядка не менее суммарной погрешности знания текущего положения обоих КА по долготе по наихудшему варианту) практически полная независимость КА друг от друга. Остается необходимость в нахождении и учитывании «соседа» КА на долготной дистанции от СКА. Способ предполагает, что оба КА добровольно делят между собой номинальную ЗОУ по долготе примерно на равные части. Недостатками прототипа являются слишком узкая в итоге ЗОУ по долготе для каждого из КА и, как следствие, повышенный расход топлива на коррекции уклонения и повышенные риски критического сближения аппаратов, либо невозможность гарантированного разнесения по долготе. В данной области по долготе могут находиться уже не один, и не два СКА. Реализуемость способа при существующих плотностях заселения ГСО КА маловероятна. Однако если для каждого из двух КА ЗОУ по долготе составит ±0,05°, функционирование каждого их них на своих рабочих позициях будет успешным.
Известна коллокация по согласованным схемам (Ю.Г. Сухой, В.Ф. Брагинец, В.М. Мещеряков «Особенности управления орбитальным движением геостационарных спутников в условиях их коллокации», Инженерный журнал: наука и инновации, №3, 2019 г., М., МГТУ). Все эти схемы сводятся к равноудалению точек прицеливания векторов еn ([еn, (Ω+ω)n], n =1,2,…) и in ([in, Ωn], n =1,2,…) в соответствующих фазовых плоскостях КА и поддержанию концов векторов еn и in внутри соответствующих областей выбранных радиусов, центрами которых являются соответствующие точки прицеливания. Идеальным вариантом считается для двух КА разнесение долгот восходящих узлов (Ωn) и прямых восхождений перигеев (Ω+ω)n точек прицеливания на 180°, причем аргументы широты перигеев КА должны быть близки нулю. Для трех КА цифру 180 заменяют на 120. Способ взят за прототип. Такой принцип коллокации общеизвестен, он следует из уровня техники. Однако за кажущейся простотой схем скрывается сложная и затратная процедура управления векторами коллокации.
Наконец, в случае нахождения в ЗОУ по долготе более трех КА, никакая системная коллокация в заданном диапазоне отклонений по долготе (и радиусу от ГСО) невозможна. Центр управления (ЦУП) каждого из КА в ЗОУ должен постоянно мониторить баллистическую ситуацию и быть готовым к выполнению коррекций уклонения.
Технической проблемой изобретения является создание способа коллокации на относительно короткое время ухода геостационарного КА из ЗОУ по долготе при переводе и уводе КА. Указанная техническая проблема решается за счет того, что в способе коллокации при переводе геостационарного КА на другую долготу стояния и уводе его на ОЗ, включающем определение параметров орбиты КА, расчет планов и проведение коррекций параметров орбиты, введены новые операции, заключающиеся в том, что при остром угле установки двигателей коррекции (ДК) более 20° относительно оси крена перед уводом из ЗОУ КА разворачивают уводимый КА (УКА) по рысканию до совмещения ДК с плоскостью орбиты УКА, выбирают срок начала увода УКА из ЗОУ, переводят УКА в центр ЗОУ, на выбранном с шагом в сутки интервале времени моделируют коллокацию УКА со всеми имеющимися в ЗОУ СКА в части безопасных соответствующих межспутниковых расстояний в условиях непрерывной работы ДК, выбранного для коррекции разгона и увеличения модуля вектора эксцентриситета орбиты на начальном полусуточном интервале времени, середина которого есть время прохождения соответствующей апсидальной точки, уточняют время начала увода УКА, определяют перспективный план коррекций орбиты УКА и в расчетное время начинают коррекцию разгона согласно перспективному плану коррекций.
Идея предлагаемого изобретения состоит в исключении возможности опасного сближения УКА с СКА при уходе УКА из ЗОУ при любых вариантах коллокации, проводимых до ухода (на этапе удержания) УКА в этой области - за счет краткости временного интервала гарантированного ухода по долготе из ЗОУ.
Изобретение направлено на технический результат - на создание и кратковременную, но достаточную консервацию условий коллокации в процессе ухода УКА из ЗОУ.
Технический результат достигается за счет того, что есть возможность для УКА быстро, в течение суток непрерывной работы ДК, выйти из зоны коллокации, оказавшись вне ЗОУ по долготе. Увеличение модуля среднего вектора эксцентриситета е вдоль его выставленного и безопасного направления в фазовой плоскости [ех; еу], где ех = |е|⋅cos(Ω+ω); еу = |е|⋅sin(Ω+ω), сохраняет гарантии имеющейся в данный момент коллокации, в отличие от изменения е по, вообще говоря, любому другому направлению.
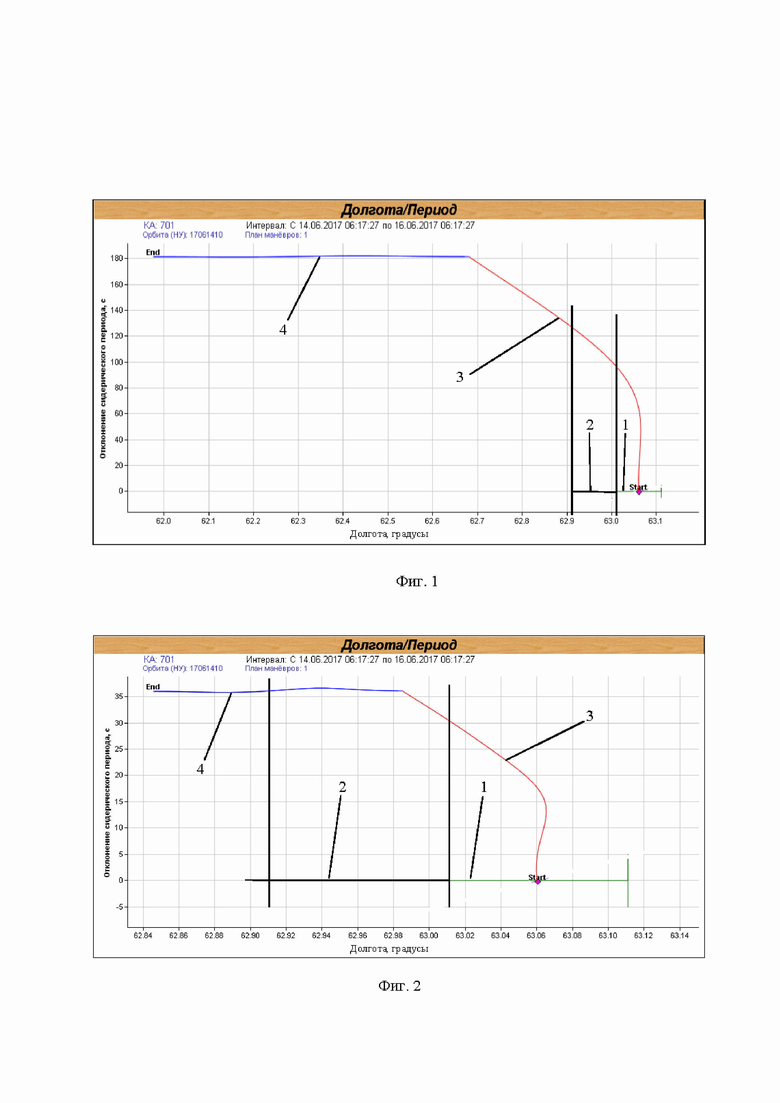
На фиг. 1 и фиг. 2 представлены маневры ухода УКА с ГСО на одну из орбит долготного дрейфа после суток непрерывной работы ДК с ускорением соответственно 2,5⋅10-5м/с2 (разворот ДК) и 0,5⋅10-5м/с2 (в отсутствие разворота ДК). На фиг. 1, 2 цифрами обозначены:
1 - ЗОУ, градусы;
2 - смежная с ЗОУ ОУ по долготе, где могут находиться СКА, градусы;
3 - активный участок орбиты УКА;
4 - пассивный участок орбиты УКА.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций:
1. Решают вопрос об ориентации УКА на этапе разгона (ухода его из ЗОУ).
Как правило, на геостационарных КА компоновка ДК такова, что самостоятельных ДК коррекций наклонения и коррекций долготы уже нет. Одним и тем же ДК проводят одновременно и коррекции наклонения, и коррекции долготы, причем в эффективности выдачи корректирующего импульса предпочтение отдается выдаче его в ортогональном направлении. Угол γ установки ДК обыкновенно составляет от 50 до 65° относительно оси Y (оси крена) связанной с КА системы координат (ССК). Какая бы не была выработана стратегия ухода из ЗОУ, эта стратегия является частью общего плана перевода на другую долготу стояния или увода на ОЗ, по энергозатратам соизмеримого с годовым топливным бюджетом удержания КА в ЗОУ. К тому же переводов КА из точки в точку допускается больше одного, и обычно выставляются жесткие требования ко времени перевода. При указанных углах γ потери импульса скорости составляют от 36 до 58%.
Если допустить, что при угле γ большем 20° будут проводиться развороты УКА вокруг оси Z (оси рыскания) ССК, то проигрыш в выдаче импульса скорости при γ меньшем 20° составит не более 8%. Это укладывается в точность знания тяги ДК.
2. Согласно принятому решению (пункт 1) по ориентации оси крена УКА либо оставляют в рабочей (штатной) ориентации, либо разворачивают по тангажу до совмещения выбранного ДК с плоскостью орбиты УКА.
3. Измеряют текущие навигационные параметры и определяют параметры орбиты УКА (ИТНП и ОПО).
4. По независимым измерениям орбит определяют параметры орбит СКА внутри ЗОУ.
Баллистические сведения о СКА возможно получать с помощью СККП - системы контроля космического пространства РФ, а также, используя, например, данные - результаты измерения параметров орбиты от международной системы слежения за спутниками NORAD. Обе системы хорошо раскрывают тактику и стратегию удержания СКА. Ошибки по векторам эксцентриситета и наклонения более чем удовлетворительны.
5. Определяют срок начала увода УКА из ЗОУ.
Срок начала ухода УКА из ЗОУ совпадает со сроком начала увода УКА на другую долготу стояния или на ОЗ.
6. Переводят УКА в центр ЗОУ.
Перевод УКА в центр ЗОУ 1 - необходимое и достаточное условие успешного ухода не только из ЗОУ, но и из смежной с ней ОУ 2 по направлению дальнейшего долготного дрейфа УКА, в которой может находиться или не находиться один или несколько СКА. Эту ОУ 2 будем проходить быстро и на высоте, гарантирующей безопасные с учетом предельных ошибок определения и прогнозирования параметров движения всех КА межспутниковые расстояния. Стартуя из середины ЗОУ 1 за 6 ч до прохождения апсидальной точки (выбор ее описан в пункте 7), в течение первых 12 ч формируют рост эксцентриситета, который является следствием непрерывного изменения на этом интервале времени текущей скорости полета УКА (увеличения - при приложении импульса скорости по орбитальной скорости в перигее орбиты УКА; уменьшения - при приложении импульса скорости против орбитальной скорости в апогее орбиты УКА). На фиг. 1, 2 окончание полусуточного интервала времени работы ДК - место начала прямолинейного наклонного активного участка (линии 3). Активный участок до окончания полусуточного интервала работы ДК поднимается практически вверх за счет компенсации текущей скорости полета УКА и среднеорбитальной скорости, образующейся вследствие увеличения (уменьшения) большой полуоси орбиты. За счет этой компенсации и старта коррекции разгона из середины ЗОУ появляется возможность именно при небольших углах установки ДК или их довороте до плоскости орбиты в трансверсальном направлении (фиг. 1) выйти из ЗОУ на высоте от ГСО, позволяющей, без оглядки на СКА в смежной с ЗОУ 1 по направлению долготного дрейфа УКА ОУ 2 по долготе, уйти на орбиту дрейфа 4. Забота о дальних соседях - наша забота.
В течение всей коррекции разгона средний за оборот вектор эксцентриситета не изменяется ни по величине, ни по направлению. Наклонение орбиты остается неизменным согласно стратегии удержания и коллокации. Все это, при нормальной ситуации с коллокацией до начала ухода УКА из ЗОУ, с большой степенью вероятности дает возможность начать процедуру ухода из ЗОУ и ОУ без предварительных орбитальных маневров по коллокации перед уходом. Во всяком случае, переходят к выполнению пункта 7.
7. Моделируют коллокацию УКА с СКА.
Достоинства прототипа неоспоримы. Согласно прототипу основной фазовый портрет - плоскость [ех; еу] ограничен радиусом максимального для ЗОУ эксцентриситета, внутри этой окружности расположены малые области - окружности, границы возможного для концов векторов эксцентриситетов с центрами в точках прицеливания по вектору эксцентриситета. То же касается фазового портрета [iх; iу]. Ненулевое наклонение с максимально возможным разнесением орбит КА и СКА по долготе восходящего узла и ненулевой (как правило) эксцентриситет с максимально возможным разнесением орбит КА и СКА по прямому восхождению перигея орбиты позволяет не принимать в расчет положение УКА по долготе и периоду обращения (радиусу орбиты). То есть, соблюдая все требования к согласованной коллокации (прототип), выхода КА из ЗОУ с возникновением критических сближений КА и СКА не будет. Но на согласованную коллокацию в ЗОУ в связи с ведомственной и даже государственной разобщенностью ЦУП рассчитывать не приходится. Значит, постоянную и долговременную коллокацию прототип не может обеспечить. Прототип не может обеспечить коллокацию и при количестве КА в ЗОУ более трех. Но ситуация меняется, когда эта коллокация имеет кратковременный характер и проходит соответственно в кратковременных условиях БО полета. Ситуация в части БО в течение 1 сут остается практически неизменной в отношении положения космических аппаратов в плоскостях [ех; еу] и [iх; iу], даже при проведении коррекции удержания. Большего для ухода из ЗОУ не требуется. Достаточно провести несколько итерационных расчетов параметров согласующих (то есть учитывающих текущие параметры движения центра масс СКА) коррекций вектора наклонения и вектора эксцентриситета орбиты УКА, чтобы добиться желаемого результата - незамедлительного ухода из ЗОУ.
На фиг. 1 приведена схема ухода из ЗОУ при типичном максимальном ускорении 2,5⋅10-5м/с2 от работы ДК, расположенного в плоскости орбиты (масса КА 3200 кг, тяга 8,0 Н). Выход из за границу ЗОУ по долготе происходит при отклонении периода обращения от звездных суток 97 с.
При расчете параметров коррекции разгона следует придерживаться следующих принципов:
1) в любом варианте расчета параметров коррекции в первые 12 ч полета с работающим ДК среднее значение модуля вектора эксцентриситета должно расти в направлении, имеющем место перед началом ухода УКА и согласующемся со стратегией коллокации на предстоящие сутки активного полета УКА, что создаст гарантию коллокации на сутки, за пределами которых вопрос коллокации будет снят;
2) для того, чтобы эксцентриситет в первые 12 ч полета с работающим ДК рос максимально эффективно и заход в смежную с ЗОУ ОУ по долготе проходил на максимальной высоте от ГСО, при организации дрейфа в западном (восточном) направлении, необходимо, чтобы УКА через 6 ч активного полета находился соответственно в районе перигея (апогея) орбиты разгона.
Крайнее время начала коррекции разгона - время прохождения выбранной апсидальной точки минус 6 ч. При больших тягах ДК время отстояния начала работы ДК от времени прохождения апсидальной точки может быть меньшим 6 ч.
Импульс скорости вдоль орбиты (ΔVτ, км/с) определяется стратегией реального управления центром масс КА по известным формулам, например, П.Е. Эльясберг «Введение в теорию полета ИСЗ», стр. 66, М., Наука, 1965 г., В.А. Одинцов, В.М. Анучин «Маневрирование в космосе», стр. 22, 23, М., Воениздат, 1974 г.:

где ΔT - изменение периода обращения, с;
V - средняя скорость полета, км/с;
Т - период обращения, с;
μ - гравитационный параметр Земли, км3/с2;
R 0 - радиус ГСО, км,
или, в м/с,
Импульс скорости при ускорении от работы ДК 2,5⋅10-5 м/с2 на интервале 12 ч составляет 1,08 м/с, что дает приращение периода обращения 90,7 с. Выход из ЗОУ здесь практически совпадает с окончанием формирования большого эксцентриситета (который принимает прежнее, как на этапе подготовки к уходу УКА, значение в течение следующих 12 ч).
С другой стороны, согласно К. Эрике «Космический полет», т. I, стр. 391, М., Физматгиз, 1963 г.:
где Т - период обращения КА, с;
a - большая полуось орбиты КА, км.
После дифференцирования (3) и перехода к приращениям будем иметь:
где  , км,
, км,
или ΔТ ≈ 3Δa.
Тогда вход в смежную с ЗОУ ОУ по долготе состоится на высоте 32 км, а выход - на высоте 42 км от ГСО. Рабочий эксцентриситет орбит КА в ОУ по долготе ±0,05° относительно долготы стояния составляет 0,00015 - 0,00030, это дает разницу между радиусом ГСО и текущим радиусом орбиты в процессе эксплуатации КА до 25 км и гарантированное межспутниковое расстояние 7 км за счет полного охвата с запасом орбит СКА разгонной орбитой УКА. «Импульс, направленный в сторону увеличения скорости спутника, вызывает одновременное увеличение высоты полета. Кинетическая энергия спутника переходит в потенциальную, и скорость полета начинает уменьшаться. На большей части орбиты (83%) это уменьшение скорости превалирует над ускоряющим импульсом. При этом средняя скорость полета уменьшается, и конечным результатом воздействия рассматриваемого импульса является увеличение периода обращения (и большой полуоси, примеч. автора) и вековое нарастающее отставание спутника от его соответствующего положения на невозмущенной орбите» (П.Е. Эльясберг «Введение в теорию полета ИСЗ, стр. 66). Те же рассуждения с соответствующими поправками относятся и к импульсу скорости, направленному на уменьшение скорости КА.
Как видно из фиг. 2, вход в смежную ОУ по долготе на уровне 30 с по периоду не позволяет решать задачу гарантированного безопасного ухода УКА с заданной орбитальной позиции. Значит, развороты по тангажу до совмещения выбранного ДК с плоскостью орбиты УКА должны стать основным правилом подготовки УКА к уходу из ЗОУ.
Следует сказать, что ДК малой тяги класса электрореактивных плазменных двигателей имеют и более высокую тягу, чем отмеченную выше. Скажем, 9,5 Н. И масса геостационарного КА может быть значительно меньше. Скажем, 1900 кг. В результате получаем исключительно надежный способ увода КА на другую долготу стояния и на ОЗ.
Если СКА в ОЗУ более двух, всегда можно реализовать два исхода:
1) дождаться благоприятных на короткий срок условий для ухода УКА;
2) договориться с ЦУП СКА о разводе орбит УКА и СКА по наклонению и эксцентриситету.
Окна возможности обязательно появятся.
Поскольку вопросы перевода по ГСО или увода на ОЗ возникают заблаговременно и уход УКА из ЗОУ согласно подпункту 1) не требует дополнительных энергозатрат на построение схемы коллокации, данный вариант ухода УКА из ЗОУ предпочтителен.
8. Уточняют время начала увода УКА.
Из выбранных вариантов сроков начала коррекции разгона выбирают наиболее оптимальные.
9. Рассчитывают план коррекций перевода (увода) с учетом коррекции разгона.
Расчет проводят по ИТНП и ОПО, полученным до перевода УКА в центр ЗОУ, поскольку параметры орбиты УКА на интервале 2 - 3 сут точно прогнозируются даже при проведении коррекций удержания в ЗОУ, а ИТНП может занять до 2 сут.
10. Включают ДК за 6 ч до прохождения выбранной в пункте 7 апсидальной точки.
11. В расчетное время выключают ДК.
12. Восстанавливают рабочую ориентацию уведенного на орбиту дрейфа или ОЗ КА.
13. Проводят ИТНП и ОПО уведенного КА и определяют конечную орбиту дрейфа при переводе КА на другую долготу стояния или на ОЗ.
14. Корректируют план дальнейшей работы с уведенным из ЗОУ КА.
Операции 9, 11 - 14 относятся к работам, следующим за реализацией данного технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДГОТОВКИ К КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787603C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2716394C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ ПРИВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ И ПЕРЕВОДА НА НОВУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2788555C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ БАЛЛИСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ МОНИТОРИНГА КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787796C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2020 |
|
RU2729347C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
Изобретение относится к области космической техники и может быть использовано при переводе геостационарного космического аппарата (КА) на другую орбитальную позицию и уводе его на орбиту захоронения. Для этого при остром угле установки двигателей коррекции (ДК) относительно оси крена перед уводом из заданной области удержания (ЗОУ) разворачивают уводимый КА (УКА) по рысканию до совмещения ДК с плоскостью орбиты УКА. Переводят УКА в центр ЗОУ. Выбирают интервал времени для моделирования коллокации УКА со всеми имеющимися в ЗОУ сторонними КА в части безопасных соответствующих межспутниковых расстояний в условиях непрерывной работы ДК. Уточняют время начала увода УКА, определяют перспективный план коррекций орбиты УКА и в расчетное время начинают коррекцию разгона согласно перспективному плану коррекций. Достигается создание коллокации на относительно короткое время при переводе геостационарного КА на другую долготу стояния или уводе его на орбиту захоронения. 2 ил.
Способ коллокации при переводе геостационарного космического аппарата (КА) на другую долготу стояния и уводе его на орбиту захоронения, включающий определение параметров орбиты КА, расчет планов и проведение коррекций параметров орбиты, отличающийся тем, что при остром угле установки двигателей коррекции (ДК) более 20° относительно оси крена перед уводом из заданной области удержания (ЗОУ) КА разворачивают уводимый КА (УКА) по рысканию до совмещения ДК с плоскостью орбиты УКА, выбирают срок начала увода УКА из ЗОУ, переводят УКА в центр ЗОУ, на выбранном с шагом в сутки интервале времени моделируют коллокацию УКА со всеми имеющимися в ЗОУ сторонними КА в части безопасных соответствующих межспутниковых расстояний в условиях непрерывной работы ДК, выбранного для коррекции разгона и увеличения модуля вектора эксцентриситета орбиты на начальном полусуточном интервале времени, середина которого есть время прохождения соответствующей апсидальной точки, уточняют время начала увода УКА, определяют перспективный план коррекций орбиты УКА и в расчетное время начинают коррекцию разгона согласно перспективному плану коррекций.
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| US 9550585 B2, 24.01.2017 | |||
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО СПУСКЕ С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2561490C1 |
| KR 100782269 B1, 04.12.2007. | |||

