Изобретение относится к методам обнаружения тепловых объектов на маскирующем атмосферном фоне в условиях ночного неба с использованием оптико-электронной системы (ОЭС), работающей в инфракрасном диапазоне волн. Рассматриваемая ОЭС имеет оптическую систему с широким полем зрения, коротким фокусным расстоянием и матричным приемником инфракрасного излучения. Угловой размер наблюдаемого точечного теплового объекта (ТТО) в такой ОЭС меньше или равен элементарному угловому полю матричных инфракрасных (ИК) приемников [1, с.58]. Под ТТО понимается малоразмерный тепловой объект, изображение которого умещается в элементарном поле зрения (представляемом на экране монитора в виде пикселя изображения) ОЭС [2, с.64].
Для таких ОЭС известен способ обнаружения объектов на ночном маскирующем фоне [3], основанный на применении порога при разделении отметок от объекта и от фона с учетом среднего значения излучения фона. Согласно этому способу [3] оптическую систему ОЭС направляют и затем фиксируют в сегменте небесной полусферы поиска, размер которого равен угловому полю ее объектива. Фоноцелевое изображение (ФЦИ) фокусируют на чувствительных элементах матричного многоэлементного приемника и, используя строчную схему считывания, фиксируют электрический сигнал, пропорциональный энергетической яркости излучения фона и ТТО. Амплитуды сигналов преобразуют в цифровой код при помощи аналого-цифрового преобразователя. Цифровые коды сигналов запоминают в оперативном запоминающем устройстве видеопроцессора в виде двумерного массива  , где
, где  , так что элемент un,m этого массива содержит информацию о напряжении, пропорциональном яркости излучения фона, снятого с ячейки многоэлементного приемника в n-й строке на m-м шаге. Далее для массива изображения U рассчитывают корреляционную диагональную матрицу K1N,N по строкам. Из элементов второй диагонали полученной матрицы K1N,N формируют вектор R1N-1. Затем для массива U рассчитывают корреляционную диагональную матрицу K2M,M по столбцам. Из элементов второй диагонали матрицы K2M,M формируют вектор R2M-1. Создают двумерный массив EN-1,M-1, в каждый элемент с индексами n и m которого записывают результаты умножения в соответствии с формулой en,m=r1n×r2m, где r1n и r2m - величины n-го и m-го элементов векторов R1N-1, и R2M-1 соответственно. Величины элементов массива EN-1,M-1 сравнивают с пороговым значением, равным 0,25. При превышении величиной элемента массива en,m порогового значения ему присваивают единичное значение, а при значении величины элемента массива en,m, меньшем или равном порогу, величину элемента обнуляют. Для формирования фоноцелевого изображения на мониторе видеоприемного устройства используют массив EN-1,M-1. Прямоугольный экран монитора видеоконтрольного устройства разделяют на прямоугольные ячейки по числу строк и столбцов массива EN-1,M-1. Ячейки en,m, содержащие нулевые значения, выделяют цветом, имеющим наибольшую контрастность по отношению к фону экрана монитора, и принимают решение, что в элементах массива со значениями en,m=0 находятся отметки от точечных тепловых объектов. По номерам строк и столбцов элементов, выделенных цветом наибольшей контрастности, определяют угловое положение тепловых объектов в сегменте поиска. При отсутствии на экране элементов, отличающихся по цвету от фона экрана монитора, принимают решение об отсутствии тепловых объектов в анализируемом сегменте небесной полусферы поиска [3].
, так что элемент un,m этого массива содержит информацию о напряжении, пропорциональном яркости излучения фона, снятого с ячейки многоэлементного приемника в n-й строке на m-м шаге. Далее для массива изображения U рассчитывают корреляционную диагональную матрицу K1N,N по строкам. Из элементов второй диагонали полученной матрицы K1N,N формируют вектор R1N-1. Затем для массива U рассчитывают корреляционную диагональную матрицу K2M,M по столбцам. Из элементов второй диагонали матрицы K2M,M формируют вектор R2M-1. Создают двумерный массив EN-1,M-1, в каждый элемент с индексами n и m которого записывают результаты умножения в соответствии с формулой en,m=r1n×r2m, где r1n и r2m - величины n-го и m-го элементов векторов R1N-1, и R2M-1 соответственно. Величины элементов массива EN-1,M-1 сравнивают с пороговым значением, равным 0,25. При превышении величиной элемента массива en,m порогового значения ему присваивают единичное значение, а при значении величины элемента массива en,m, меньшем или равном порогу, величину элемента обнуляют. Для формирования фоноцелевого изображения на мониторе видеоприемного устройства используют массив EN-1,M-1. Прямоугольный экран монитора видеоконтрольного устройства разделяют на прямоугольные ячейки по числу строк и столбцов массива EN-1,M-1. Ячейки en,m, содержащие нулевые значения, выделяют цветом, имеющим наибольшую контрастность по отношению к фону экрана монитора, и принимают решение, что в элементах массива со значениями en,m=0 находятся отметки от точечных тепловых объектов. По номерам строк и столбцов элементов, выделенных цветом наибольшей контрастности, определяют угловое положение тепловых объектов в сегменте поиска. При отсутствии на экране элементов, отличающихся по цвету от фона экрана монитора, принимают решение об отсутствии тепловых объектов в анализируемом сегменте небесной полусферы поиска [3].
К недостаткам способа следует отнести, во-первых, его детерминированность, т.е. использование жесткого неизменного порога принятия решения. При «гладком» фоне и отсутствии излучений местных предметов предложенный порог р=0,25 хорошо селектирует ТТО на фоне излучения атмосферы. Однако при наличии ярких контрастных облачных образований (грозовые облака, облака кучевой облачности 9 баллов) их излучения могут оказаться выше значения порога, что приведет к ошибочному отнесению облачных отметок к целевым. Это особенно опасно в алгоритмах автоматического обнаружения ТТО, когда для селекции ложных отметок от метеообразований не привлекается интеллект человека. Поэтому при увеличении яркости фона порог принятия решения должен адаптивно изменяться, поддерживая вероятность обнаружения ТТО на должном уровне. Во-вторых, даже при использовании адаптивного порога излучения местных предметов всегда будут его превышать и в результате будут выражаться в виде засвеченных секторов (областей), которые автоматическими системами будут отнесены к целям (к совокупности большого числа целей). Поэтому усовершенствованный способ должен предполагать устранение на ФЦИ областей, принадлежащих местным предметам, оставляя для обработки только отдельные точечные изображения искусственных объектов.
Задачей изобретения является разработка способа обнаружения одиночных ТТО на ночном маскирующем атмосферном фоне с адаптивным учетом изменения характеристик атмосферного фона и исключением из обработки изображений местных предметов.
Для решения задачи изобретения предлагается использовать пространственно-пороговую и оконную обработки принятых сигналов.
Пространственно-пороговую и оконную обработки принятых сигналов предлагается реализовать программно в соответствии со следующей последовательностью действий:
1. Получить массив изображения  из сигналов на выходе аналого-цифрового преобразователя видеопроцессора размером N×M, где N - число строк, а М - число столбцов массива.
из сигналов на выходе аналого-цифрового преобразователя видеопроцессора размером N×M, где N - число строк, а М - число столбцов массива.
2. Рассчитать приближенное среднее значение яркости фонового шума для массива  по формуле:
по формуле:

где un,m - элемент массива  , находящийся в N-й строке и М-м столбце.
, находящийся в N-й строке и М-м столбце.
3. Сформировать массив обработки  , в каждый элемент которого, имеющий индексы n и m, записать результат расчета в соответствии с формулой
, в каждый элемент которого, имеющий индексы n и m, записать результат расчета в соответствии с формулой

4. Рассчитать порог р принятия решения по формуле:

где fmax - максимальное значение элементов массива F;
fсред - среднее арифметическое величин элементов массива F, рассчитываемое по формуле:
5. Сравнить каждый элемент массива F c вычисленным порогом р и в случае превышения элементом fn,m порога присвоить ему единичное значение, а в противном случае - присвоить ему нулевое значение.
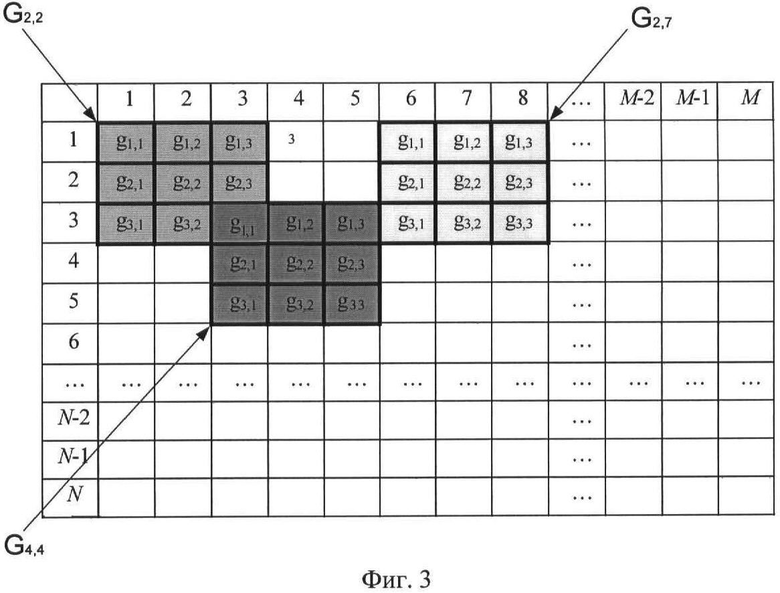
6. Сформировать из элементов массива F множество квадратных девятиэлементных матриц размером 3×3. Число таких матриц  , представленных на фиг.1, будет равно (N-2)(M-2). Индексацию полученных матриц Gs,k проводить в соответствии с индексами элементов массива F, которые в соответствующей матрице Gs,k имеют индексы х=2 и y=1 (на фиг.1 выделен цветом).
, представленных на фиг.1, будет равно (N-2)(M-2). Индексацию полученных матриц Gs,k проводить в соответствии с индексами элементов массива F, которые в соответствующей матрице Gs,k имеют индексы х=2 и y=1 (на фиг.1 выделен цветом).
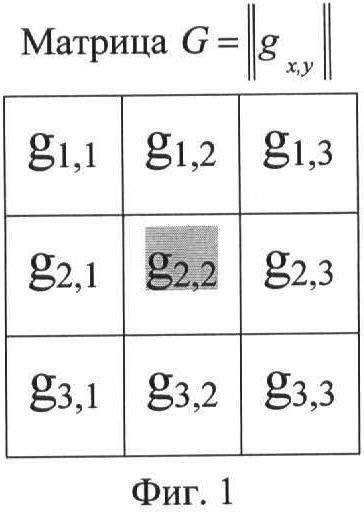
Поясним порядок формирования матриц Gs,k. Каждая матрица Gs,k должна являться плотной составной частью массива F. Матрица Gs,k создается для каждого элемента массива F (за исключением элементов крайних строк и столбцов, образующих «периметр плоскостного визуального изображения» массива и выделенных на фиг.2 цветом), и должна включать кроме этого элемента еще 8 смежных с ним элементов из состава массива F.
Так, элементами первой создаваемой матрицы G будут являться элементы f1,1, f1,2, f1,3, f2,1, f2,2, f2,3, f3,1, f3,2, f3,3 массива F.
Индексы серединного элемента g2,2 первой матрицы G в массиве F имеют значения n=2 и m=1. Значит, первая матрица G будет иметь индексы s=2 и k=2, т.е. будет носить наименование G2,2. Вторая матрица G будет состоять из элементов, f1,2, f1,3, f1,4, f2,2, f2,3, f2,4, f3,2, f3,3, f3,4 массива F. Она формируется методом сдвига первой 9-элементной квадратной матрицы G2,2 в пределах массива F на один столбец вправо. Серединный элемент g2,2 второй матрицы совпадает с элементом f2,3 массива F. Следовательно, вторая матрица G будет иметь индексы s=2 и k=3, т.е. будет обозначаться G2,3. Так, поочередно передвигаясь влево в пределах массива F на один столбец вправо, будет сформировано (М-2) матриц с индексами G2,2, G2,3, G2,4,…,G2,M-3, G2,M-2, G2,M-1. Сдвигая эти матрицы на одну строку вниз в пределах массива F, получим очередную (вторую) группу 9-элементных квадратных матриц G с индексами G3,2, G3,3,…,G3,M-1. Повторяя сдвиг на одну строку вниз, получим (N-2) групп матриц, по (М-2) в каждой. Последняя группа будет иметь индексы GN-1,2, GN-1,3,…,GN-1,M-1.
На фиг.3 показаны матрицы G2,2, G2,7, G4,4, сформированные в пределах массива F из его элементов. В каждой матрице Gs,k всегда имеется 9 элементов с индексами х и y, изменяющимися от 1 до 3. Таким образом, индекс s матрицы Gs,k изменяется от 2 до (N-1) и однозначно связан с индексом соответствующей строки n массива F, в которой расположен серединный элемент матрицы Gs,k. Столбцовый индекс k матрицы Gs,k изменяется от 2 до (М-1) и однозначно определяется номером столбца m массива F, в котором расположен серединный элемент матрицы Gs,k.
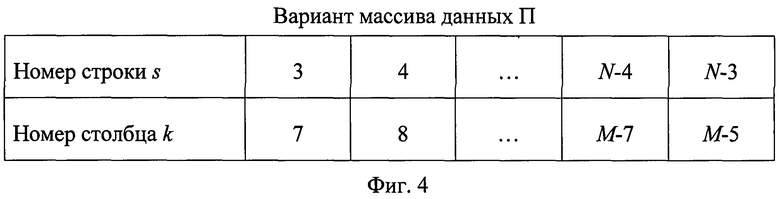
7. Проанализировать каждую матрицу Gs,k, т.е. проверить выполнение условия, чтобы в ней все элементы были нулевыми, а серединный элемент g2,2 - единичным. В случае выполнения этого двойного условия анализируемая матрица Gs,k маркируется как полезная  . В противном случае анализируемая матрица не маркируется, т.е. соответствующие ей индексы s и k не запоминаются. Индексы полезных матриц заносятся в специальный массив данных П, изображенный на фиг.4.
. В противном случае анализируемая матрица не маркируется, т.е. соответствующие ей индексы s и k не запоминаются. Индексы полезных матриц заносятся в специальный массив данных П, изображенный на фиг.4.
8. Сформировать фоноцелевое изображение на экране монитора видеоконтрольного устройства, для чего предварительно разделить весь экран на прямоугольные ячейки по числу строк и столбцов массива F и присвоить всем им нулевое значение яркости, что соответствует отсутствию в них ТТО, а затем, используя номера строк и столбцов, занесенных в матрицу П, соответствующим элементам массива F присвоить единичное значение. Выделить цветом элементы, имеющие единичное значение, имеющим наибольшую контрастность по отношению к фону экрана монитора, выражающему нулевой уровень яркости.
9. Зная угловое положение центрального элемента ФЦИ, по номерам строк и столбцов элементов, выделенных цветом наибольшей контрастности, определить наличие и угловое положение ТТО в сегменте поиска.
Сущность предлагаемого способа заключается в том, что в отличие известного способа для обнаружения ТТО на ночном маскирующем атмосферном фоне (АФ), используя сигналы, получаемые с выхода аналого-цифрового преобразователя видеопроцессора и рассчитанные значения яркости фонового шума, производят пространственно-оконную и пороговую обработки ФЦИ, позволяющие формировать бинарное изображение на экране монитора видеоконтрольного устройства, на котором присутствуют одиночные ТТО и отсутствуют отметки от местных предметов.
При пространственно-оконной обработке размер окна определяется характером изменения дисперсий флуктуации яркости собственного излучения, а также величиной радиуса пространственной корреляции яркостей излучения фона. Для сложной облачности размер радиуса пространственной корреляции по углу места составляет не менее 3°, а по азимуту - не менее 5°. Расчет элементарного углового поля зрения Эупз матричного приемника с горизонтальным размером углового поля зрения 20° проводился по формуле:

где L - горизонтальный размер углового поля зрения, град.;
Z - количество элементов в строке массива, шт.
Например, если угловые размеры сектора поиска (угла зрения объектива) составляют 20°×15° и после оцифровки амплитуд сигналов излучения в строке массива изображения имеется 240 элементов (соответствующих углу просмотра по горизонтали 20°), то размер одного элемента массива по горизонтали соответствует величине угла, равной 0,08°. Проведенные расчеты показали, что для учета характера изменения дисперсий флуктуации яркости собственного излучения и размеров радиуса пространственной корреляции сложного атмосферного фона по углу места и азимуту целесообразно использовать матрицу анализа с размерами не более 37×37 элементов. Чем меньше размер матрицы анализа, тем меньше вероятность того, что в ее пределах будут находиться элементы с существенно различными яркостями излучения фона. Значит, отметка от ТТО будет сильно отличаться по величине яркости от смежных с ней элементов матрицы. Наиболее точная оценка обеспечивается при использовании матрицы, которая соответствует телесному углу 0,24°×0,24°. Вот почему размер матрицы Gs,k равен 3×3, что соответствует размеру окна анализа 3×3 пикселя.
Оконная обработка позволяет избавиться от пикселей, для которых значение яркости, превышающее значение адаптивного порога, вызвано излучением от местных предметов.
С использованием выражения (3) рассчитывался адаптивный порог р. Он позволяет учитывать характер изменения дисперсий флуктуации яркости собственного излучения, а также величину радиуса пространственной корреляции яркостей излучения сложного атмосферного фона [4].
С целью проверки состоятельности предложенного адаптивного порога р было проведено математическое моделирование с использованием моделей излучения точечных ТТО и сложного атмосферного фона, на котором присутствовали излучения местных предметов [5]. Модели были построены на основе оцифрованных видеосигналов, полученных с видеовыхода ОЭС в ночных условиях в летний и осенний сезоны для следующих типов облачности: ясная, кучевая, слоистая, перистая в спектральном диапазоне 8-13 мкм, размером 320×240 пикселей. Преобразование информации из изображения (кадра) в формат электронной таблицы проводилось с использованием расчетно-аналитической программы, предназначенной для применения в научных экспериментах по исследованию и анализу свойств и характеристик сигналов тепловизионных устройств [6]. Для оптимизации процесса обработки матрицы производится настройка ее размеров, которая и будет соответствовать размерности обрабатываемой матрицы (массива). В случае необходимости геометрические размеры матрицы можно изменить. Всего было обработано 8000 кадров для каждого типа облачности.
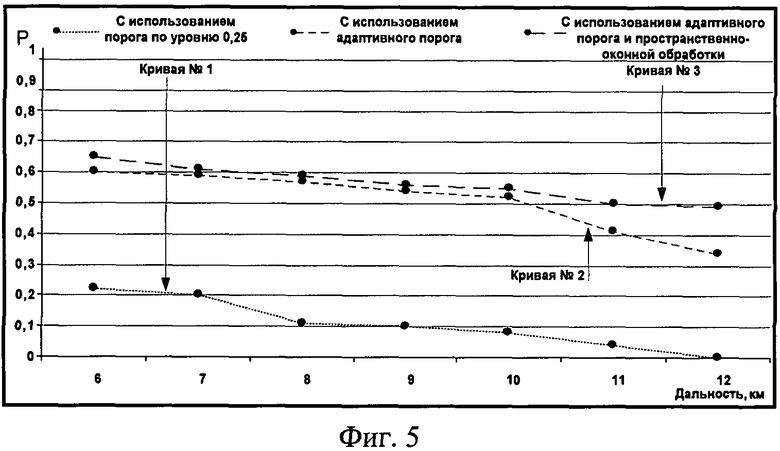
На фиг.5 представлена графическая зависимость средних значений вероятностей Р правильного обнаружения одиночных точечных тепловых объектов на сложном атмосферном фоне от дальности с использованием различных значений адаптивного порога р, вычисляемого по формуле (3), для случаев присутствия излучения от местных предметов. На фиг.5 кривая №1 соответствует пороговой обработке, в процессе которой проводят сравнение величин элементов массива  с пороговым значением, равным 0,25 [5]. Кривая №2 соответствует пороговой обработке, в процессе которой проводят сравнение величин элементов массива
с пороговым значением, равным 0,25 [5]. Кривая №2 соответствует пороговой обработке, в процессе которой проводят сравнение величин элементов массива  с адаптивным пороговым значением, рассчитываемым по формуле (4). Излучения от присутствующих местных предметов воспринимаются как ложные цели. Кривая №3 соответствует пороговой обработке, в процессе которой проводят сравнение величин элементов массива
с адаптивным пороговым значением, рассчитываемым по формуле (4). Излучения от присутствующих местных предметов воспринимаются как ложные цели. Кривая №3 соответствует пороговой обработке, в процессе которой проводят сравнение величин элементов массива  с адаптивным пороговым значением, рассчитываемым по формуле (4), а затем применяется пространственно-оконная обработка. Анализ представленных на фиг.5 зависимостей вероятности Р обнаружения ТТО для рассмотренных типов облачности позволяет сделать вывод, что существующая пороговая обработка не позволяет обеспечить средние значения вероятностей обнаружения ТТО для дальности 10 км более 0,4. Средние вероятности правильного обнаружения Р при адаптивном пороге и пространственно-оконной обработке выше соответствующих вероятностей, свойственных прототипу [3]. Рост вероятности объясняется использованием пространственно-оконной обработки, которая исключает из процесса обработки изображения от местных предметов.
с адаптивным пороговым значением, рассчитываемым по формуле (4), а затем применяется пространственно-оконная обработка. Анализ представленных на фиг.5 зависимостей вероятности Р обнаружения ТТО для рассмотренных типов облачности позволяет сделать вывод, что существующая пороговая обработка не позволяет обеспечить средние значения вероятностей обнаружения ТТО для дальности 10 км более 0,4. Средние вероятности правильного обнаружения Р при адаптивном пороге и пространственно-оконной обработке выше соответствующих вероятностей, свойственных прототипу [3]. Рост вероятности объясняется использованием пространственно-оконной обработки, которая исключает из процесса обработки изображения от местных предметов.
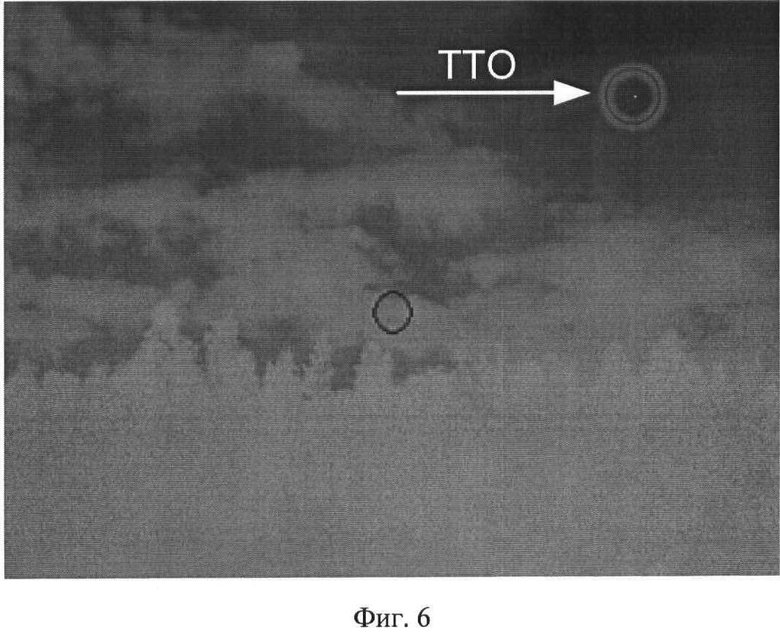
Изображение фоноцелевой обстановки с точечным тепловым объектом, полученное для кучевой облачности 6-9 баллов при наличии излучения лесного массива, представлено на фиг.6. На фиг.7 это изображение, выведенное на экран монитора видеоконтрольного устройства, получено после проведения пороговой обработки, в процессе которой проводилось сравнение величин элементов массива  с адаптивным пороговым значением р. Проведенная обработка позволяет выявить и выделить уровнем цвета отметки от цели ТТО и местных предметов.
с адаптивным пороговым значением р. Проведенная обработка позволяет выявить и выделить уровнем цвета отметки от цели ТТО и местных предметов.
Для крайних строк и столбцов, образующих «периметр плоскостного визуального изображения», матрицы Gs,k не создаются. Причиной является то, что смежные с ними элементы ФЦИ, находящиеся за пределами массива F, являются неизвестными, что не позволяет провести анализ их причастности к реальным воздействиям, вызванным присутствием целей.
Особенностью предложенного способа является его неработоспособность при наличии групповых целей, т.к. алгоритм устранения местных предметов обнулит яркости любых двух смежных тепловых отметок (пикселей).
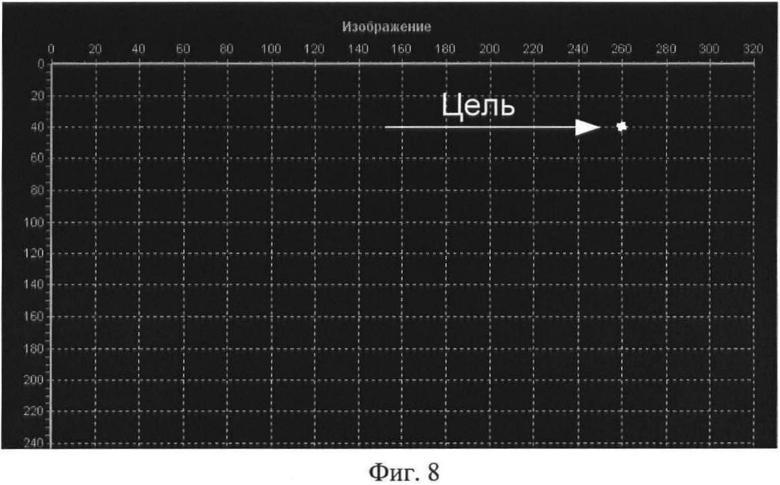
На фиг.8 рассматриваемое фоноцелевое изображение выведено на экран монитора видеоконтрольного устройства после проведения обработки с использованием предложенного алгоритма, в процессе которой проводили сравнение величин элементов массива 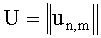 с адаптивным пороговым значением р, а затем применяли пространственно-оконную обработку. Ее использование позволяет исключить излучения местных предметов. На рассматриваемом ФЦИ присутствует только изображение ТТО.
с адаптивным пороговым значением р, а затем применяли пространственно-оконную обработку. Ее использование позволяет исключить излучения местных предметов. На рассматриваемом ФЦИ присутствует только изображение ТТО.
Достоинством разработанного способа является возможность обнаружения одиночных точечных тепловых объектов, находящихся в разных точках пространства даже в случаях нахождения в обрабатываемом массиве отметок от местных предметов. Полученные на экране монитора контрастные изображения тепловых объектов позволяют определять их угловые координаты, количественный состав и другие характеристики без предварительной подготовки человека-оператора, что приводит к увеличению информационной способности и простоте эксплуатации оптико-электронных систем.
Источники информации
1. Якушенков Ю.Г., Тарасов В.В. Инфракрасные системы «смотрящего» типа. М.: Логос, 2004. 430 с.
2. Приходько В.Н., Хисамов Р.Ш. Обнаружение «точечных» объектов теплопеленгатором на основе матричного фотоприемного устройства // Оборонная техника. Вып.1-2, 2007. С.64-66.
3. Патент РФ №2401445, G02B 23/12, G01S 3/78. Способ селекции тепловых объектов. Якименко И.В., Митрофанов Д.Г. и др. Заявка №2008143830. Заявл. 05.11.2008. Опубл. 10.10.2010 (Прототип).
4. Якименко И.В., Жендарев М.В. Способ пространственной фильтрации тепловых объектов на коррелированном атмосферном фоне. М., Наукоемкие технологии, 2009. №3. Т.10. С.67-71.
5. Алпатов Б.А., Бабаян П.В., Балашов О.Е., Степашкин А.И. Методы автоматического обнаружения и сопровождения объектов. Обработка изображений и управление. М.: Радиотехника, 2008. 176 с.
6. Свидетельство об отраслевой регистрации электронного ресурса №00042. Якименко И.В., Коваль С.Н., Жендарев М.В. и др. // Государственная академия наук. Российская академия образования Институт информатизации образования. Цифровая обработка сигналов тепловизионных устройств перспективных образцов вооружений. М., Информационный образовательный ресурс локального доступа. Алгоритмы и программы №1 Рег. №50200900636. Заявл. 23.06.2009. Опубл. 7.07.2009.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ТЕПЛОВЫХ ОБЪЕКТОВ НА СЛОЖНОМ АТМОСФЕРНОМ ФОНЕ | 2011 |
|
RU2461017C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕПЛОВЫХ ОБЪЕКТОВ НА ФОНЕ НЕБЕСНОЙ ПОЛУСФЕРЫ | 2009 |
|
RU2407028C2 |
| СПОСОБ СЕЛЕКЦИИ ТЕПЛОВЫХ ОБЪЕКТОВ | 2008 |
|
RU2401445C2 |
| Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне | 2015 |
|
RU2634374C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ВЫЯВЛЕНИЯ ЗАКОНА ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ ПОВОРОТА СОПРОВОЖДАЕМОГО ВОЗДУШНОГО ОБЪЕКТА ПО ПОСЛЕДОВАТЕЛЬНО ПРИНЯТЫМ ОТРАЖЕНИЯМ СИГНАЛОВ С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2013 |
|
RU2525829C1 |
| Способ адаптивного обеспечения высокой разрешающей способности радиолокатора по дальности за счет оценивания информационного диапазона параметра регуляризации инверсного фильтра | 2021 |
|
RU2785383C1 |
| Оптико-электронная система для определения спектроэнергетических параметров и координат источника лазерного излучения инфракрасного диапазона | 2015 |
|
RU2616875C2 |
| Способ обеспечения высокой разрешающей способности радиолокатора по дальности за счет выбора оптимального параметра регуляризации инверсного фильтра | 2021 |
|
RU2756291C1 |
| Способ построения панорамного радиолокационного изображения объекта | 2016 |
|
RU2629372C1 |
| СПОСОБ ПОИСКА И РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2011 |
|
RU2458397C1 |
Изобретение относится к методам обнаружения тепловых объектов на маскирующем атмосферном фоне в условиях ночного неба с использованием оптико-электронных средств. Достигаемый технический результат - упрощение процесса принятия операторами решения о наличии изображений точечных тепловых объектов (самолетов, вертолетов, крылатых ракет, беспилотных летательных аппаратов и др.) на мониторе видеоконтрольного устройства оптико-электронной системы и их пространственном положении в условиях присутствия отметок от местных предметов. Сущность способа состоит в том, что для обнаружения точечного теплового объекта в условиях сложного фона предлагается использовать пороговую и пространственную обработки принятых сигналов, которые повышают отношение сигнал/фон и, как следствие, - вероятность принятия решения о наличии искомого точечного теплового объекта в поле зрения оптико-электронной системы. Работоспособность способа подтверждена результатами математического моделирования с использованием моделей излучения воздушных целей и фона в условиях ночного неба. 8 ил.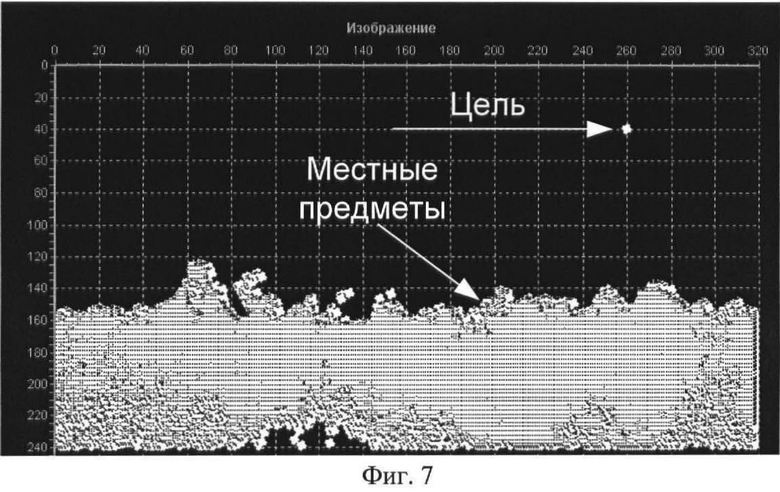
Способ обнаружения точечных тепловых объектов на маскирующем атмосферном фоне, заключающийся в том, что оптическая система теплопеленгатора направляется и затем фиксируется в сегменте небесной полусферы поиска, равном угловому размеру поля зрения оптической системы теплопеленгатора, в котором предполагается нахождение теплового объекта, фоноцелевое изображение фокусируется на чувствительных площадках матричного многоэлементного приемника излучения и с использованием строчной схемы считывания снимается электрический сигнал, пропорциональный двумерному распределению энергетической яркости излучения фона и теплового объекта, амплитудные значения сигнала преобразуются в цифровой код при помощи аналого-цифрового преобразователя, цифровой код запоминается в оперативном запоминающем устройстве видеопроцессора в виде двумерного массива U так, что элемент этого массива un,m содержит информацию о напряжении, пропорциональном яркости излучения фона, снятого с ячейки многоэлементного приемника в n-й строке на m-м шаге, для получения фоноцелевого изображения на экране монитора видеоконтрольного устройства предварительно разделяют весь экран на прямоугольные ячейки, по номерам строк и столбцов элементов, которые в виду наличия в них отметок от точечных тепловых объектов имеют высокую контрастность по отношению к фону фоноцелевого изображения, определяют угловое положение точечных тепловых объектов в сегменте поиска, отличающийся тем, что для массива изображения U рассчитывают среднее значение яркости фонового шума кадра по формуле  , где N число строк, а М - число столбцов массива, un,m - элемент массива
, где N число строк, а М - число столбцов массива, un,m - элемент массива  , находящийся в n-й строке и m-м столбце, формируют массив обработки F, в каждый элемент которого, имеющий индексы n и m, записывают результаты расчета по формуле
, находящийся в n-й строке и m-м столбце, формируют массив обработки F, в каждый элемент которого, имеющий индексы n и m, записывают результаты расчета по формуле  ,сравнивают каждый элемент массива F с порогом р, рассчитываемым по формуле
,сравнивают каждый элемент массива F с порогом р, рассчитываемым по формуле  , где fmax - максимальное значение элементов массива F, fсред - среднее арифметическое величин элементов массива F, рассчитываемое по формуле
, где fmax - максимальное значение элементов массива F, fсред - среднее арифметическое величин элементов массива F, рассчитываемое по формуле  и в случае превышения элементом fn,m порога р этому элементу fn,m присваивают единичное значение, а в противном случае присваивают ему нулевое значение, формируют из элементов массива F множество квадратных девятиэлементных матриц
и в случае превышения элементом fn,m порога р этому элементу fn,m присваивают единичное значение, а в противном случае присваивают ему нулевое значение, формируют из элементов массива F множество квадратных девятиэлементных матриц  размером 3×3, матрицы G формируют для каждого элемента fn,m массива F за исключением элементов крайних строк и столбцов массива F, в состав очередной (n,m)-й формируемой матрицы включают элемент fn,m n-й строки m-го столбца массива F и восемь смежных с ним элементов из состава массива F, индексы строки s и столбца k матрицы Gs,k назначают соответствующими, то есть, равными индексам n и m элемента массива F, который занимает в матрице Gs,k центральное положение, то есть, имеет в матрице
размером 3×3, матрицы G формируют для каждого элемента fn,m массива F за исключением элементов крайних строк и столбцов массива F, в состав очередной (n,m)-й формируемой матрицы включают элемент fn,m n-й строки m-го столбца массива F и восемь смежных с ним элементов из состава массива F, индексы строки s и столбца k матрицы Gs,k назначают соответствующими, то есть, равными индексам n и m элемента массива F, который занимает в матрице Gs,k центральное положение, то есть, имеет в матрице  индексы х=2 и у=2, анализируют каждую матрицу Gs,k методом проверки выполнения условия, чтобы в ней все элементы были нулевыми, а серединный элемент g2,2 - единичным, в случае выполнения этого условия анализируемая матрица Gs,k маркируется как полезная
индексы х=2 и у=2, анализируют каждую матрицу Gs,k методом проверки выполнения условия, чтобы в ней все элементы были нулевыми, а серединный элемент g2,2 - единичным, в случае выполнения этого условия анализируемая матрица Gs,k маркируется как полезная  , индексы полезных матриц заносят в специальный массив данных П, в противном случае анализируемая матрица не маркируется, то есть, соответствующие ей индексы s и k не запоминаются, формируют фоноцелевое изображение на экране монитора видеоконтрольного устройства, при предварительном разбиении экрана на прямоугольные ячейки число этих ячеек выбирают равным числу строк и столбцов массива F и присваивают всем им значение нулевой яркости, что соответствует отсутствию в них точечного теплового объекта, а затем, используя номера строк и столбцов, занесенных в матрицу П, выделяют на экране монитора ячейки с номерами, соответствующими индексам, хранящимся в массиве П, цветом, имеющим наибольшую контрастность по отношению к фону экрана монитора, выражающему нулевой уровень яркости.
, индексы полезных матриц заносят в специальный массив данных П, в противном случае анализируемая матрица не маркируется, то есть, соответствующие ей индексы s и k не запоминаются, формируют фоноцелевое изображение на экране монитора видеоконтрольного устройства, при предварительном разбиении экрана на прямоугольные ячейки число этих ячеек выбирают равным числу строк и столбцов массива F и присваивают всем им значение нулевой яркости, что соответствует отсутствию в них точечного теплового объекта, а затем, используя номера строк и столбцов, занесенных в матрицу П, выделяют на экране монитора ячейки с номерами, соответствующими индексам, хранящимся в массиве П, цветом, имеющим наибольшую контрастность по отношению к фону экрана монитора, выражающему нулевой уровень яркости.
| СПОСОБ СЕЛЕКЦИИ ТЕПЛОВЫХ ОБЪЕКТОВ | 2008 |
|
RU2401445C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2219564C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕПЛОВЫХ ОБЪЕКТОВ НА ФОНЕ НЕБЕСНОЙ ПОЛУСФЕРЫ | 2009 |
|
RU2407028C2 |
| ЛИДАРНЫЙ СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОАКТИВНОГО ЗАГРЯЗНЕНИЯ МЕСТНОСТИ | 2006 |
|
RU2377597C2 |
| US 7541588 В2, 02.06.2009 | |||
| US 20070221849 А1, 27.09.2007 | |||
| JP 6121317 А, 28.04.1994 | |||
| WO 2010003742 А1, 14.01.2010 | |||
| Беспазовый статор электрической машины | 1990 |
|
SU1746477A1 |

