Изобретение относится технике связи, телеметрии и может быть использовано в системах передачи телеметрических данных робототехнических комплексов.
Согласно [Назаров, А.В. Современная телеметрия в теории и на практике. Учебный курс / А. В. Назаров, Г.И. Козырев, И.В. Шитов [и др.]. - Санкт-Петербург: Наука и Техника, 2007. - 672 с.] известные способы передачи телеметрических сигналов, в общем, заключаются в том, что от n датчиков принимают телеметрические сигналы si(t) (i=1, 2, …, n). Оцифровывают si (t), получая последовательность телеметрических данных s1, s2, …, sn, которую объединяют в телеметрические кадры Cj, подлежащие передаче по каналу связи на приемную сторону. Программа телеизмерений может определять предварительное зашифрование.
Все вышеперечисленное предполагает наличие самостоятельного канала связи для передачи телеметрических данных или совместного использования данного канала, например, с каналом связи для передачи управляющих сигналов, что предъявляет дополнительные требования к пропускной способности данного канала связи и каналообразующей аппаратуре.
Известен способ организации беспроводного канала управления мобильным робототехническим комплексом и система связи и передачи данных [Патент 2547633, МПК G08C 17/02 (2006.01). 2014 г., бюл. №10]. Способ включает организацию беспроводного канала управления мобильным робототехническим комплексом (МРК), включающий организацию канала информационного обмена комплекса, оснащенного средствами приема и передачи информации, между системами комплекса, в том числе между системой опознавания образов, блоками обработки информации, датчиками и вычислительной системой комплекса. Технический результат достигается тем, что на первоначальном этапе для организации беспроводного канала управления МРК производится оценка и определение необходимой пропускной способности канала для передачи команд управления и телеметрии, на втором этапе проводится оценка и определение необходимой пропускной способности канала для передачи видеоинформации с учетом анализа качества распознаваемости объектов различной конфигурации на передаваемой видеоинформации, на третьем этапе проводится сравнительный анализ форматов сжатия и передачи видеоданных, выбор режимов исходного изображения и структуры подсистемы связи, на четвертом этапе проводится анализ характеристик частотных диапазонов и выбор наиболее подходящего для применения в составе МРК диапазона частот, исходя из возможности обеспечения связи на расстоянии и технических характеристик необходимого оборудования, на пятом этапе формируется структура системы связи и передачи данных, основанная на смешанном комплексном методе передачи информации в аналоговом и цифровом виде.
Недостатками данного аналога являются невозможность обеспечения скрытого доведения телеметрических данных при передаче по радиоканалу и наличие физического канала передачи телеметрических данных.
Известен способ скрытой передачи зашифрованной информации по множеству каналов связи [Патент RU 2462825, H04L 9/00, 2012 г.], заключающийся в том, что открытый текст разбивают на блоки, каждый блок шифруют с помощью шифра со сцеплением блоков  на ключе k1, получая криптограмму G1, состоящую из т блоков и повторно шифруют шифром
на ключе k1, получая криптограмму G1, состоящую из т блоков и повторно шифруют шифром  на ключе k2, получая криптограмму G2, состоящую из r блоков, далее, полученные блоки стеганографически скрывают в r контейнерах различного типа с использованием ключа k3, который определяет тип контейнера и секретные параметры алгоритмов внедрения. Полученные r контейнеров со встроенной информацией пересылают по нескольким каналам связи в соответствии с ключом k4. При организации связи используют S=Sc+Sm доступных каналов связи, где в текущем сеансе связи с помощью ключа k4 выделяют не все, а только часть доступных каналов связи Sc, по всем доступным каналам S=Sc+Sm непрерывно передают камуфлирующие сигналы, а полезную информацию передают в псевдослучайные моменты времени.
на ключе k2, получая криптограмму G2, состоящую из r блоков, далее, полученные блоки стеганографически скрывают в r контейнерах различного типа с использованием ключа k3, который определяет тип контейнера и секретные параметры алгоритмов внедрения. Полученные r контейнеров со встроенной информацией пересылают по нескольким каналам связи в соответствии с ключом k4. При организации связи используют S=Sc+Sm доступных каналов связи, где в текущем сеансе связи с помощью ключа k4 выделяют не все, а только часть доступных каналов связи Sc, по всем доступным каналам S=Sc+Sm непрерывно передают камуфлирующие сигналы, а полезную информацию передают в псевдослучайные моменты времени.
Недостатками указанного способа являются необходимость реализации многоканальной системы передачи данных и отсутствие защищенности передаваемых данных от воздействия помех.
Известен способ безопасного кодирования информации для ее передачи по открытым каналам связи методами стеганографии [Патент RU 2649753, H04L 9/00 (2006.01), 2016 г., бюл. №10] заключается в том, что осуществляют обмен между корреспондентами секретными ключами Kшифр и Kстег. Открытое сообщение Мj может быть предварительно зашифровано с использованием ключа шифрования Kшифр, получают криптограмму Gj, которую далее передают указанным способом.
Технический результат достигается тем, что вместе с ключами корреспонденты осуществляют обмен двумя таблицами пронумерованных попарно простых модулей (оснований), таблица №1: р1, р2, …, pV - V информационных модулей и таблица №2:  ,
,  , …,
, …,  служебных модулей. Выполняют анализ поступающих Z контейнеров на основании которого определяют максимальное количество бит (отсчетов)
служебных модулей. Выполняют анализ поступающих Z контейнеров на основании которого определяют максимальное количество бит (отсчетов)  одного контейнера, обеспечивающее безопасное встраивание информации методами стеганографии. В
одного контейнера, обеспечивающее безопасное встраивание информации методами стеганографии. В  резервируется фиксированное количество бит
резервируется фиксированное количество бит  , необходимых для встраивания служебной информации
, необходимых для встраивания служебной информации  Осуществляют перегруппировку полученного массива, элементами которого станут значения Lj,i таким образом, что r наибольших Lj,i выстраивают справа по возрастанию, а порядок следования п оставшихся Lj,i оставляют без изменения, причем n+r=Z и данные о первоначальном значении порядковых номеров, соответствующих естественному порядку следования контейнеров, сохраняются. Из таблицы №1 производят выбор n попарно простых модулей по условию pj,i>[antlog Lj,i], а r проверочных модулей выбирают следующие по порядку, по возрастанию
Осуществляют перегруппировку полученного массива, элементами которого станут значения Lj,i таким образом, что r наибольших Lj,i выстраивают справа по возрастанию, а порядок следования п оставшихся Lj,i оставляют без изменения, причем n+r=Z и данные о первоначальном значении порядковых номеров, соответствующих естественному порядку следования контейнеров, сохраняются. Из таблицы №1 производят выбор n попарно простых модулей по условию pj,i>[antlog Lj,i], а r проверочных модулей выбирают следующие по порядку, по возрастанию  где χ1, χ2, χ3, …, χZ - есть номера модулей из таблицы №1. Далее получают информационные вычеты gj,i по правилу:
где χ1, χ2, χ3, …, χZ - есть номера модулей из таблицы №1. Далее получают информационные вычеты gj,i по правилу:  , так что фрагмент передаваемой информации Gj есть результат конкатенации п вычетов
, так что фрагмент передаваемой информации Gj есть результат конкатенации п вычетов  и получают избыточные вычеты
и получают избыточные вычеты  по правилу:
по правилу:  , где Xj является решением системы сравнений
, где Xj является решением системы сравнений  . По правилу:
. По правилу:  по n известным номерам модулей, выполняют расширение модулярного кода, принимая номера χ1, χ2, χ3, …, χZ модулей за вычеты модулярного кода по системе попарно простых модулей из таблицы №2. Находят избыточные вычеты uj,n+1, …, uj,n+r по правилу:
по n известным номерам модулей, выполняют расширение модулярного кода, принимая номера χ1, χ2, χ3, …, χZ модулей за вычеты модулярного кода по системе попарно простых модулей из таблицы №2. Находят избыточные вычеты uj,n+1, …, uj,n+r по правилу: где
где  по системе модулей
по системе модулей  из таблицы №2. Далее определяют номера контейнеров, которым соответствуют избыточные вычеты и порядок их следования в модулярном коде {Nj,1, …, Nj,t}. Объединяют полезную и служебную информации, формируя, тем самым, двоичные блоки
из таблицы №2. Далее определяют номера контейнеров, которым соответствуют избыточные вычеты и порядок их следования в модулярном коде {Nj,1, …, Nj,t}. Объединяют полезную и служебную информации, формируя, тем самым, двоичные блоки  . Выполняют обратную сортировку блоков
. Выполняют обратную сортировку блоков  , восстанавливая порядок их следования в соответствии с естественным порядком следования контейнеров αj,1, αj,2, …, αj,z и по ключу для стеганографического преобразования Kстег встраивают информационные блоки в Z контейнеров методами стеганографии, передают их в канал связи.
, восстанавливая порядок их следования в соответствии с естественным порядком следования контейнеров αj,1, αj,2, …, αj,z и по ключу для стеганографического преобразования Kстег встраивают информационные блоки в Z контейнеров методами стеганографии, передают их в канал связи.
Недостатками указанного способа являются необходимость выполнения вычислений для проведения анализа контейнера, что приводит к задержке во времени, а также наличие излишней передаваемой избыточной информации в виде номеров модулей из таблицы №1 и номеров контейнеров, которым соответствуют избыточные вычеты.
Известен способ передачи телеметрической информации, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления [Патент RU 2480838, МПК G08C 19/00 (2006.01), 2013 г., бюл. №12], принятый за прототип и заключающийся в том, что на передающей стороне формируют с помощью датчиков множество телеметрируемых параметров (ТМП), изменение которых с течением времени с допустимыми погрешностями, устанавливаемыми как для отдельных ТМП, так и для заранее сформированных их групп, совпадает с соответствующими контролируемыми физическими процессами. Формируют по каждому из них первичные телеметрические сигналы с заранее рассчитанными динамическими диапазонами, которые находят путем аналого-цифрового преобразования сформированных первичных сигналов, выполняемого с рассчитанным периодом дискретизации и с заданным шагом квантования. Кодовые слова-измерения определенной разрядности объединяют в телеметрические кадры, начало которых задано синхросигналами, имеющими структуру представления кода, отличную от аналогичных показателей словизмерений, и определяющими начало и установленный порядок следования данных телеизмерений различных датчиков. Осуществляют передачу следующих друг за другом телеметрических кадров по каналу связи на приемную сторону и прием на приемной стороне полученной последовательности телеметрических кадров и содержащихся в них синхрослов и кодовых слов-измерений. Формирование на приемной стороне восстановленной последовательности выборок первичного сигнала путем такого преобразования принятой последовательности кодовых слов, что значение каждой восстановленной выборки первичного сигнала равно значению соответствующего принятого кодового слова. Технический результат достигается тем, что на передающей стороне формируют две группы телеметрируемых параметров, при этом первая из них, называемая информационно-значимой, составлена из данных телеизмерений датчиков, функционирование которых не связано с отделяющимися элементами конструкции ракеты, а вторую представляют данные, функционирование которых прекращается при отделении элементов конструкции ракеты, при отделении элементов конструкции ракеты вместе с датчиками телеизмерений. В формируемых телеметрических кадрах в места, ранее занимаемые измерениями отделившихся датчиков, подставляют избыточные проверочные символы, превращающие простые коды измерений оставшихся информационно-значимых телеметрируемых параметров в помехоустойчивые, обладающие способностью обнаруживать и исправлять ошибки передачи данных, при этом количество проверочных символов равно числу символов слов-измерений, принадлежащих ко второй группе телеметрируемых параметров, которые были исключены из передачи при отделении телеметрируемых элементов конструкций ракеты, в результате чего длина телеметрических кадров остается постоянной. При приеме телеметрической информации определяют моменты изменения полярностей результатов обработки синхросигналов, которые связаны с моментами времени изменения заранее рассчитанных режимов формирования и передачи данных, определяемые при этом моменты времени используют для выбора алгоритма обнаружения ошибок передачи и их исправления, который соответствует действующему режиму формирования и передачи данных, установленному на борту ракеты.
Недостатками прототипа являются наличие отдельного канала связи для передачи телеметрических данных, и невозможность обеспечения скрытого доведения телеметрических данных.
Техническим результатом данного изобретения является достижение скрытности факта передачи телеметрических данных и упразднение отдельного канала связи для их передачи.
Технический результат изобретения достигается тем, что способ скрытой защищенной передачи телеметрических данных в робототехнических комплексах, заключающийся в том, что с помощью датчиков формируют множество телеметрируемых параметров s1(t), s2(t), …, sl(t). Выполняют их аналогово-цифровое преобразование в цифровые данные s1, s2, …, sl или в зашифрованном виде c1, с2, …, cl.
Группируют их в  телеметрических кадров
телеметрических кадров 
 …,
…, которые кодируют помехоустойчивым кодом. Передают следующие друг за другом телеметрические кадры по каналу связи на приемную сторону. На приемной стороне выполняют проверку полученной последовательности телеметрических кадров на наличие обнаруживаемых ошибок, отличающийся тем, что осуществляют обмен между корреспондентами секретным ключом Ksteg. Телеметрические кадры
которые кодируют помехоустойчивым кодом. Передают следующие друг за другом телеметрические кадры по каналу связи на приемную сторону. На приемной стороне выполняют проверку полученной последовательности телеметрических кадров на наличие обнаруживаемых ошибок, отличающийся тем, что осуществляют обмен между корреспондентами секретным ключом Ksteg. Телеметрические кадры  кодируют помехоустойчивым многозначным (n, k) кодом так, что последовательность представляет собой кодовые комбинации указанного кода c1=(c1,1, c1,2, …, c1, k+r), c2=(c2,1, c2,2, …, c2,k+r), …, ci=(ci,1, ci,2, …, ci,k+r). Выполняют процедуру перемежения символов кодовых комбинаций, формируя новые последовательности символов
кодируют помехоустойчивым многозначным (n, k) кодом так, что последовательность представляет собой кодовые комбинации указанного кода c1=(c1,1, c1,2, …, c1, k+r), c2=(c2,1, c2,2, …, c2,k+r), …, ci=(ci,1, ci,2, …, ci,k+r). Выполняют процедуру перемежения символов кодовых комбинаций, формируя новые последовательности символов 
 …,
…,  . По ключу Ksteg методами стеганографии выполняют встраивание последовательностей
. По ключу Ksteg методами стеганографии выполняют встраивание последовательностей  в мультимедийные данные, передаваемые робототехническим комплексом на пункт приема. На принимающей стороне по ключу Ksteg извлекают из мультимедийных данных элементы последовательностей
в мультимедийные данные, передаваемые робототехническим комплексом на пункт приема. На принимающей стороне по ключу Ksteg извлекают из мультимедийных данных элементы последовательностей  . Выполняют процедуру деперемежения символов, формируя кодовые комбинации
. Выполняют процедуру деперемежения символов, формируя кодовые комбинации  . Выполняют процедуру их помехоустойчивого декодирования и, при необходимости, исправление искаженных символов, получая
. Выполняют процедуру их помехоустойчивого декодирования и, при необходимости, исправление искаженных символов, получая  . Благодаря новой совокупности существенных признаков в способе реализована возможность скрытой передачи телеметрических данных, передаваемых в робототехнических комплексах за счет их сокрытия в контейнерах методами стеганографии, а также способ позволяет упразднить отдельный физический канал связи для передачи телеметрических данных.
. Благодаря новой совокупности существенных признаков в способе реализована возможность скрытой передачи телеметрических данных, передаваемых в робототехнических комплексах за счет их сокрытия в контейнерах методами стеганографии, а также способ позволяет упразднить отдельный физический канал связи для передачи телеметрических данных.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники.
Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Заявленное изобретение поясняется чертежами, на которых показано:
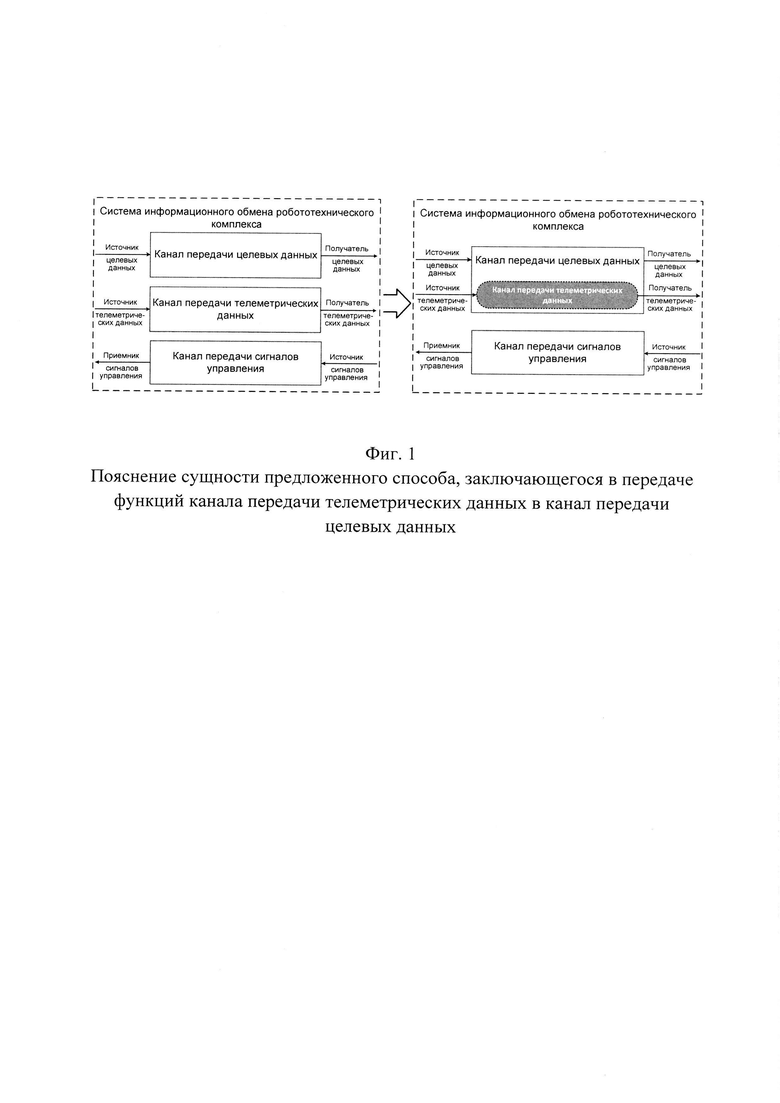
фиг. 1 - пояснение сущности предложенного способа, заключающегося в передаче функций канала передачи телеметрических данных в канал передачи целевых данных;
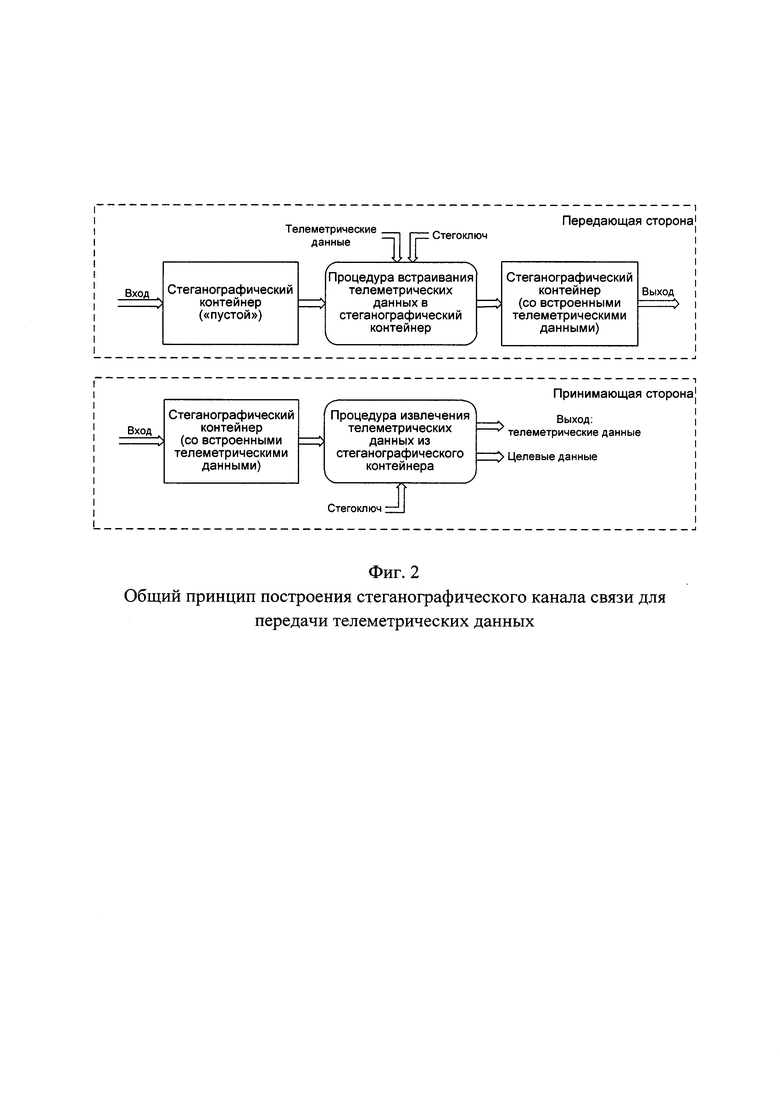
фиг. 2 - общий принцип построения стеганографического канала связи для передачи телеметрических данных;
фиг. 3 - общий принцип построения защищенного от ошибок стеганографического канала связи для передачи телеметрических данных на примере использования фотокадров в качестве контейнеров;
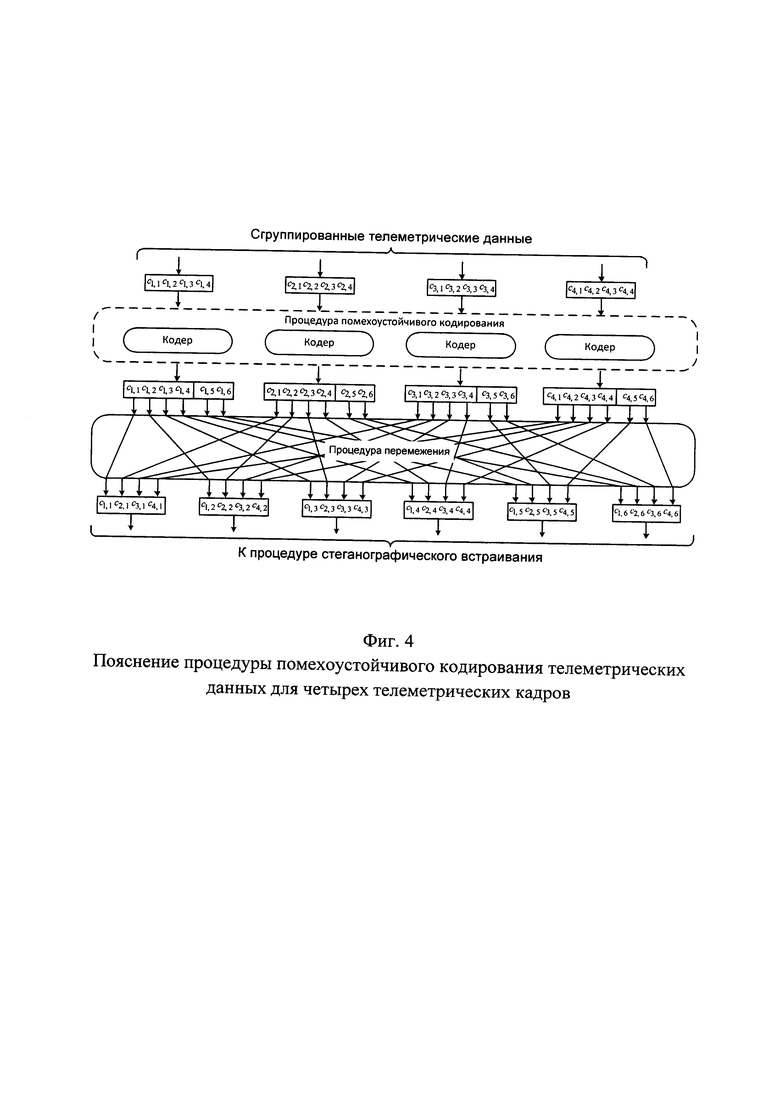
фиг. 4 - пояснение процедуры помехоустойчивого кодирования телеметрических данных для четырех телеметрических кадров, включающих по четыре телеметрируемых параметра;
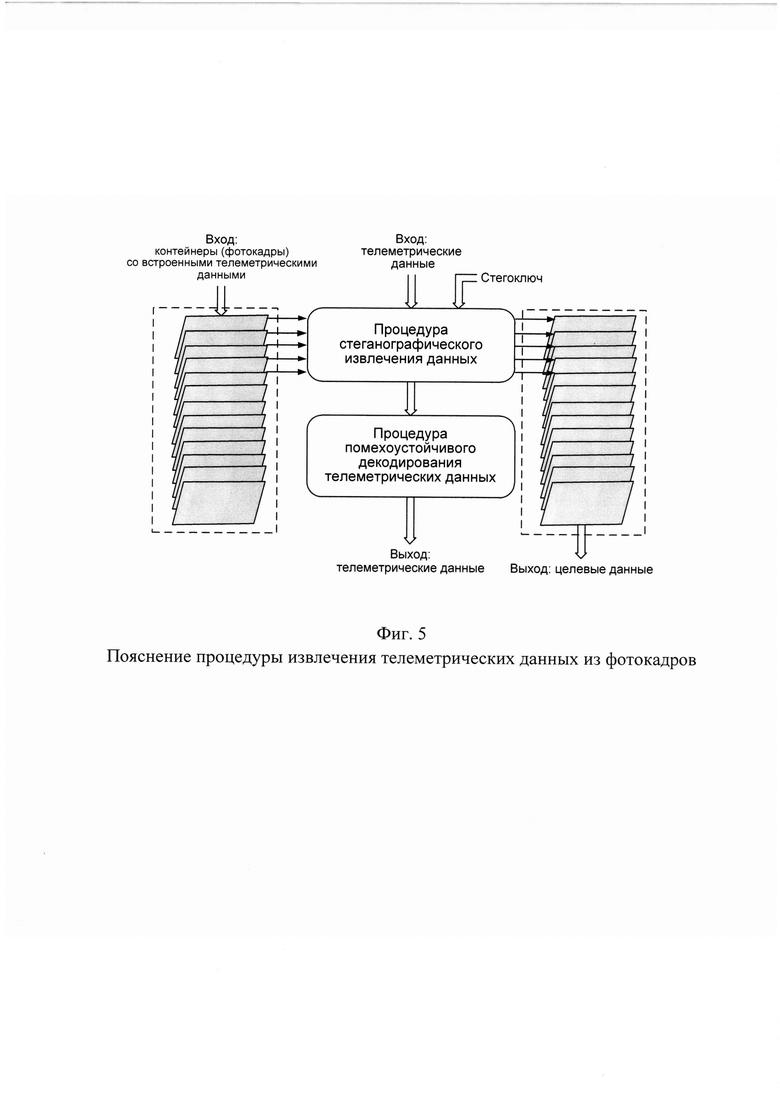
фиг. 5 - пояснение процедуры извлечения закодированных телеметрических данных из видеоряда;
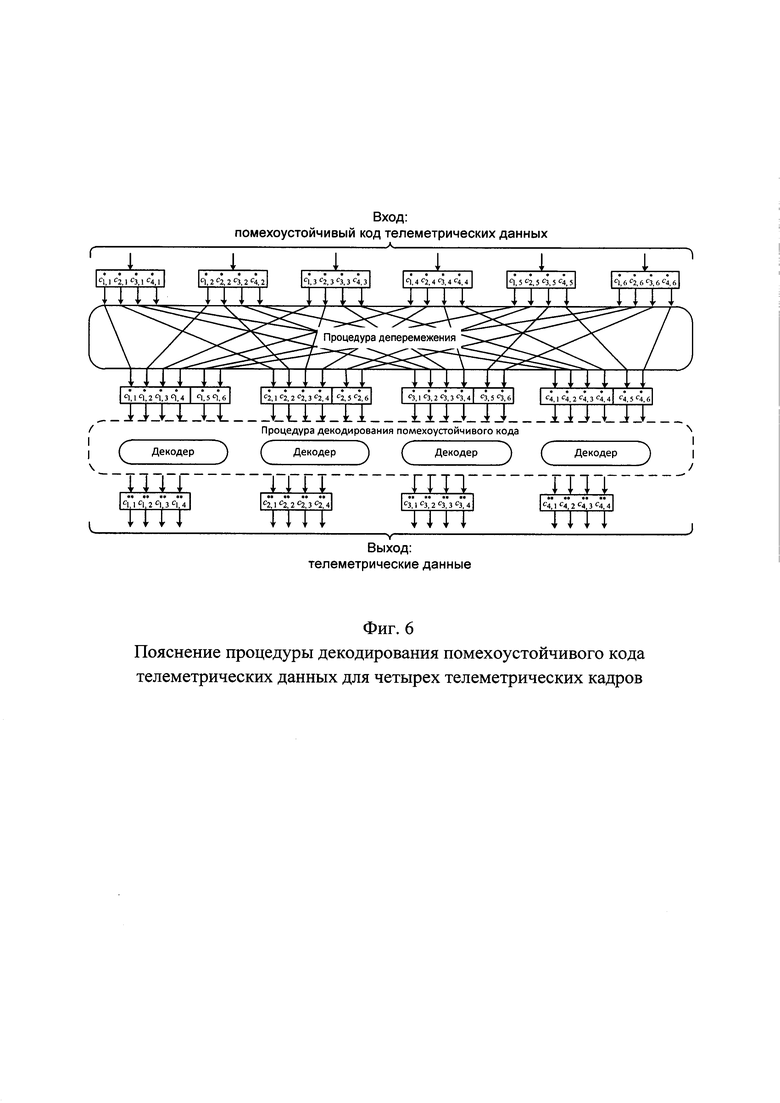
фиг. 6 - пояснение процедуры декодирования помехоустойчивого кода телеметрических данных для четырех телеметрических кадров, включающих по четыре телеметрируемых параметра.
В общем случае система информационного обмена данными в робототехническом комплексе предусматривает наличие трех симплексных каналов передачи данных: канал передачи целевых данных, канал передачи телеметрических данных и канал передачи сигналов управления. Это приводит к дополнительным аппаратным, массогабаритным и финансовым затратам при проектировании и создании робототехнического комплекса. Для устранения данного недостатка первые два канала могут быть объединены. Действительно, канал передачи целевых данных обладает высокой пропускной способностью в сравнении с каналом передачи телеметрических данных и может обеспечить формирование на его основе логического канала передачи данных (фиг. 1), например, методами стеганографии, позволяющими скрыть сам факт передачи данных.
Так, робототехнические комплексы в процессе функционирования формируют «уникальные», не имеющие аналогов, контейнеры (видео- и фотоданные), обладающие достаточной избыточностью для передачи в них полезной информации (телеметрических данных) методами стенографии (фиг. 2).
Контейнером Т[0] («пустым» контейнером) будем называть несекретные данные, имеющие аналоговую природу и используемые для сокрытия сообщений m, преимущественно за счет их избыточности.
Под контейнером-результатом (стего) Т[m] будем понимать контейнер со скрытно встроенным в нем сообщением т.
Стеганографическим каналом связи (СКС) будем называть канал связи, формируемый на базе и внутри открытого канала связи, и предназначенный для передачи скрываемого сообщения m, подлежащего встраиванию в контейнер Т[0] (контейнеры) методами стеганографии.
Под q - кратной ошибкой будем понимать произвольное искажение данных, встроенных в q - контейнеров.
Большое число стеганографических методов сокрытия информации описано в [Грибунин, В.Г., Цифровая стеганография / В.Г. Грибунин, И.Н. Оков, И.В. Туринцев. - Москва: Солон-Пресс, 2009. - с. 155-247; Конахович, Г.Ф. Компьютерная стеганография: теория и практика / Г.Ф. Конахович, Ю.А. Пузыренко. - Киев: МК-Пресс, 2006. - с. 70-245]. В общем виде процесс встраивания данных может быть представлен в виде [Грибунин, В.Г., Цифровая стеганография / В.Г. Грибунин, И.Н. Оков, И.В. Туринцев. - Москва: Солон-Пресс, 2009. - с. 18-21] функции прямого стеганографического преобразования F(ksteg, ci, Ti[0]), аргументами которой являются:
ksteg -секретный ключ стеганографического преобразования (стегоключ);
Ci - данные, подлежащие сокрытию в контейнер Ti[0] (например, в качестве контейнера могут быть выбраны кадры видеоряда).
Тогда процесс извлечения данных, представляет собой решение функции обратного стеганографического преобразования  , аргументами которой являются:
, аргументами которой являются:
ksteg _ секретный ключ стеганографического преобразования (стегоключ);
 - контейнер, со встроенными в него полезными данными
- контейнер, со встроенными в него полезными данными  Символ «*» означает вероятностный характер деструктивного воздействия на скрытно передаваемые данные.
Символ «*» означает вероятностный характер деструктивного воздействия на скрытно передаваемые данные.
Применение тех или иных методов стеганографических преобразований в рамках предлагаемого способа не является принципиальным вопросом, так как выбор конкретного метода будет зависеть от требований, предъявляемых к системе передачи данных в робототехническом комплексе и выбираться на этапе проектирования.
В свою очередь, в процесс передачи телеметрических данных вероятно возникновение деструктивных воздействий (случайных и преднамеренных) на передаваемые данные, приводящих к появлению ошибок. Одним из основных методов обеспечения помехоустойчивости является применение избыточного кодирования, используемое в прототипе. Следовательно, важно сохранить свойство помехоустойчивости телеметрических данных и в рамках предлагаемого решения для СКС (фиг. 3). Для обеспечения коррекции группирующихся ошибок кодами корректирующими независимые ошибки целесообразно выполнять процедуру перемежения символов кодовых комбинаций, а встраивание слов помехоустойчивого кода целесообразно выполнять во множество контейнеров, в противном случае возникновение ошибок в одном контейнере может привести к деградации всех данных.
В отличие от прототипа, выполняющего процедуру помехоустойчивого кодирования данных на канальном уровне модели взаимодействия открытых систем (МВОС), процедуры, предлагаемые в данном изобретении (помехоустойчивого кодирования данных и стеганографического преобразования данных) выполняются на уровне представления данных МВОС.
Заявленный способ реализуется следующим образом.
Исходные данные:
телеметрические данные, которые могут быть представлены:
в открытом виде (s1, s2, …, sl);
в зашифрованном виде (c1, с2, …, cl);
а также содержать имитовставку,
стегоключ (ksteg),
контейнеры Ti[0].
Информационно-телеметрическая система робототехнического комплекса с l датчиков принимает сигналы, при необходимости усиливает их и оцифровывает, формируя, таким образом, групповой телеметрический сигнал s1, s2, …, sl, который, в общем виде, может быть зашифрован с использованием ключа kcript по правилу ci→E(kcript, si). Получают l блоков шифртекста c1, с2, …, cl.
Последовательность c1, c2, …, cl разбивают на  блоков длины k (параметры n и k задаются техническими требованиями к системе, r=n-k), получая систему:
блоков длины k (параметры n и k задаются техническими требованиями к системе, r=n-k), получая систему:

Далее каждый блок  , где j=1, 2, …, i, кодируют многозначным помехоустойчивым кодом (пояснение для четырех телеметрических кадров представлено на фиг. 4), формируя систему кодовых комбинаций:
, где j=1, 2, …, i, кодируют многозначным помехоустойчивым кодом (пояснение для четырех телеметрических кадров представлено на фиг. 4), формируя систему кодовых комбинаций:
Выполняют процедуру перемежения символов кодовых комбинаций, формируя последовательности:
Далее по ключу ksteg методами стеганографии выполняют встраивание последовательности  в разные контейнеры или отдельные части одного контейнера
в разные контейнеры или отдельные части одного контейнера  Таким образом, процедура перемежения символов кодовых комбинаций позволяет интерпретировать ошибку любой кратности в масштабе одного контейнера, как однократную ошибку в кодовой комбинации Cj.
Таким образом, процедура перемежения символов кодовых комбинаций позволяет интерпретировать ошибку любой кратности в масштабе одного контейнера, как однократную ошибку в кодовой комбинации Cj.
Рассмотрим реализацию помехоустойчивого кодирования телеметрических данных на примере многозначного кода Рида-Соломона, обладающего минимальным кодовым расстоянием по Хеммингу dmin=n-k+1 и являющимся кодом с максимальным расстоянием [Блейхут Р. Теория и практика кодов, контролирующих ошибки. - М.: Мир, 1986. - Стр. 202].
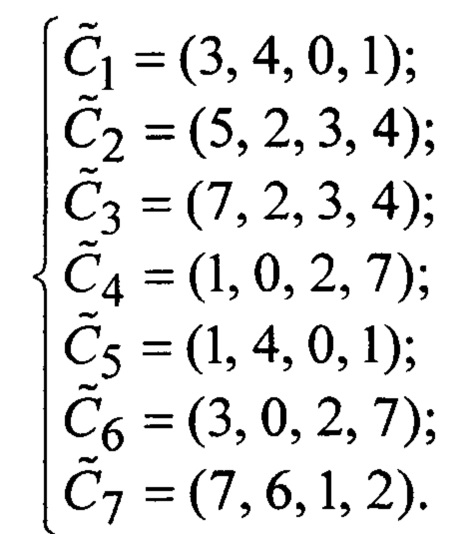
Пусть необходимо передать групповой телеметрический сигнал (3, 5, 7, 4, 2, 2, 0, 3, 3, 1, 4, 4), при n=7 кодом, способным исправлять 2 ошибки q=2. Код Рида-Соломона исправляет q и менее ошибок, при r≥2q. Тогда r=4, получаем код Рида-Соломона (7, 3), определенный над полем Галуа GF[23]. Следовательно, система (1) примет вид:

Код Рида-Соломона позволяет выполнять кодирование данных как систематическим, так и несистематическим кодом. Для наглядности выполним кодирование систематическим кодом, когда проверочные символы в кодовом слове занимают позиции отдельно от информационных. Тогда система (2):

После процедуры перемежения встраиванию в контейнеры (части одного контейнера) методами стеганографии будут подлежать последовательности:
Встроенные методами стеганографии телеметрические данные передаются транспортной системой канала передачи целевых данных, по СКС, что позволяет упразднить физический канал связи для передачи телеметрических данных (фиг. 1) и достичь требования скрытности передачи данных.
На принимающей стороне (фиг. 5) по ключу ksteg из принятых контейнеров  извлекают по правилу:
извлекают по правилу:
 u=1, 2, …, k+r возможно измененные последовательности:
u=1, 2, …, k+r возможно измененные последовательности: 
 …;
…; 
Выполняют процедуру деперемежения (обратная процедуре перемежения), формируя кодовые слова (пояснение для четырех телеметрических кадров представлено на фиг.6):
Далее выполняют проверку на наличие ошибок и при необходимости их исправляют, получая:
Где  - исправленные информационные символы, u=1, 2, …, i, j=1, 2, …, k (символ «**» означает вероятностный характер исправления ошибок произвольной кратности).
- исправленные информационные символы, u=1, 2, …, i, j=1, 2, …, k (символ «**» означает вероятностный характер исправления ошибок произвольной кратности).
Таким образом, в результате применения предлагаемого способа достигается комплексный технический результат, заключающийся:
в обеспечении скрытности факта передачи телеметрических данных,
в упразднении отдельного канала связи для передачи телеметрических данных, за счет передачи последних методами стеганографии по каналу связи, предназначенному для передачи целевых данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ безопасного кодирования информации для ее передачи по открытым каналам связи методами стеганографии | 2016 |
|
RU2649753C2 |
| СПОСОБ И СИСТЕМА СКРЫТОГО ПОМЕХОУСТОЙЧИВОГО ОПОВЕЩЕНИЯ | 2017 |
|
RU2665251C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РОБАСТНОСТИ ЦИФРОВОГО ВОДЯНОГО ЗНАКА, ВСТРАИВАЕМОГО В СТАТИЧЕСКОЕ ИЗОБРАЖЕНИЕ, ПЕРЕДАВАЕМОЕ ПО КАНАЛУ СВЯЗИ С ПОМЕХАМИ | 2022 |
|
RU2785832C1 |
| СПОСОБ СКРЫТОЙ ПЕРЕДАЧИ ДАННЫХ В ВИДЕОИЗОБРАЖЕНИИ | 2014 |
|
RU2608150C2 |
| Способ скрытного информационного обмена | 2018 |
|
RU2708354C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| СПОСОБ СКРЫТОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ С КОДОВЫМ УПЛОТНЕНИЕМ В ВИДЕОДАННЫХ | 2015 |
|
RU2616869C2 |
| СПОСОБ ПАРАЛЛЕЛЬНОЙ ПЕРЕДАЧИ ДАННЫХ В САМООРГАНИЗУЮЩИХСЯ РАДИОСЕТЯХ ГРУПП РОБОТОТЕХНИЧЕСКИХ СРЕДСТВ | 2022 |
|
RU2789978C1 |
| СПОСОБ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ЗАЩИТЫ ИНФОРМАЦИИ | 2019 |
|
RU2703972C1 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ ДАННЫХ, ПЕРЕДАВАЕМЫХ С ИСПОЛЬЗОВАНИЕМ БЛОЧНЫХ РАЗДЕЛИМЫХ КОДОВ, ОТ ИМИТИРУЮЩИХ ДЕЙСТВИЙ ЗЛОУМЫШЛЕННИКА | 2019 |
|
RU2738789C1 |

Изобретение относится к телеметрии, технике связи и может быть использовано в системах передачи телеметрических данных в робототехнических комплексах. Технический результат заключается в обеспечении скрытности факта передачи телеметрических данных. Осуществляют обмен между корреспондентами секретным ключом Ksteg. Оцифрованные телеметрические данные s1, s2, …, sl группируют в i=l/k телеметрических кадров 
 …,
…,  которые кодируют помехоустойчивым многозначным (n, k) кодом, формируя кодовые комбинации C1=(c1,1 c1,2, …, с1,k+r), C2=(c2,1, c2,2, …, c2,k+r), Ci=(ci,1, ci,2, …, ci,k+r). Выполняют процедуру перемежения символов кодовых комбинаций, формируя новые последовательности символов. По ключу Ksteg методами стеганографии выполняют встраивание последовательностей С1, С2, …, Ck+r в мультимедийные данные, передаваемые робототехническим комплексом. На принимающей стороне по ключу Ksteg извлекают из мультимедийных данных элементы последовательностей
которые кодируют помехоустойчивым многозначным (n, k) кодом, формируя кодовые комбинации C1=(c1,1 c1,2, …, с1,k+r), C2=(c2,1, c2,2, …, c2,k+r), Ci=(ci,1, ci,2, …, ci,k+r). Выполняют процедуру перемежения символов кодовых комбинаций, формируя новые последовательности символов. По ключу Ksteg методами стеганографии выполняют встраивание последовательностей С1, С2, …, Ck+r в мультимедийные данные, передаваемые робототехническим комплексом. На принимающей стороне по ключу Ksteg извлекают из мультимедийных данных элементы последовательностей  выполняют процедуру деперемежения символов, формируя кодовые комбинации, выполняют этап их помехоустойчивого декодирования. 6 ил.
выполняют процедуру деперемежения символов, формируя кодовые комбинации, выполняют этап их помехоустойчивого декодирования. 6 ил.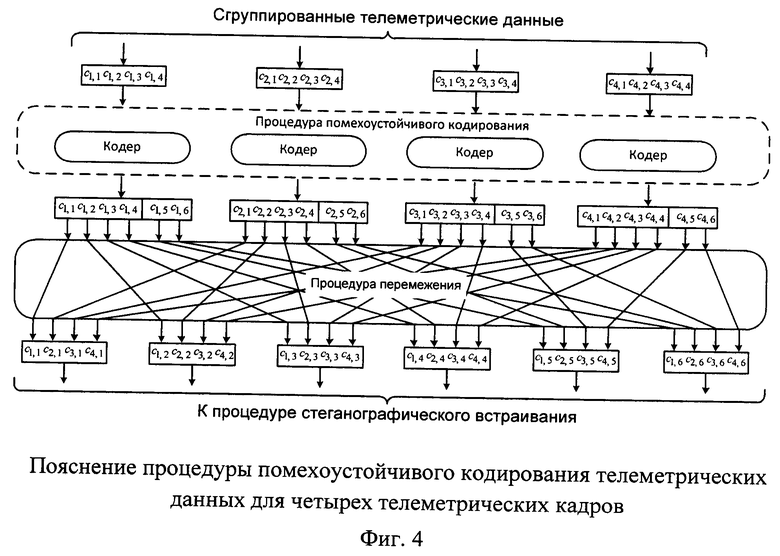
Способ скрытой защищенной передачи телеметрических данных в робототехнических комплексах, заключающийся в том, что с помощью датчиков формируют множество телеметрируемых параметров s1(t),s2(t), …, sl(t), выполняют их аналогово-цифровое преобразование в цифровые данные s1, s2, …, sl и в зашифрованном виде с1, с2, …, cl, группируют их в  телеметрических кадров
телеметрических кадров  ,
,  , …,
, …,  , которые кодируют помехоустойчивым кодом, передают следующие друг за другом телеметрические кадры по каналу связи на приемную сторону, на приемной стороне выполняют проверку полученной последовательности телеметрических кадров на наличие обнаруживаемых ошибок, отличающийся тем, что осуществляют обмен между корреспондентами секретным ключом Ksteg, телеметрические кадры
, которые кодируют помехоустойчивым кодом, передают следующие друг за другом телеметрические кадры по каналу связи на приемную сторону, на приемной стороне выполняют проверку полученной последовательности телеметрических кадров на наличие обнаруживаемых ошибок, отличающийся тем, что осуществляют обмен между корреспондентами секретным ключом Ksteg, телеметрические кадры  ,
, , …,
, …, кодируют помехоустойчивым многозначным (n, k) кодом так, что последовательность представляет собой кодовые комбинации указанного кода C1=(с1,1, с1,2, …, с1, k+r), C2=(c2,1, c2,2, …, c2,k+r), …, Ci=(ci,1, ci,2, …, ci,k+r), выполняют процедуру перемежения символов кодовых комбинаций, формируя новые последовательности символов
кодируют помехоустойчивым многозначным (n, k) кодом так, что последовательность представляет собой кодовые комбинации указанного кода C1=(с1,1, с1,2, …, с1, k+r), C2=(c2,1, c2,2, …, c2,k+r), …, Ci=(ci,1, ci,2, …, ci,k+r), выполняют процедуру перемежения символов кодовых комбинаций, формируя новые последовательности символов  ,
,  , …,
, …,  , по ключу Ksteg методами стеганографии выполняют встраивание последовательностей
, по ключу Ksteg методами стеганографии выполняют встраивание последовательностей  в мультимедийные данные, передаваемые робототехническим комплексом на пункт приема, на принимающей стороне по ключу Ksteg извлекают из мультимедийных данных элементы последовательностей
в мультимедийные данные, передаваемые робототехническим комплексом на пункт приема, на принимающей стороне по ключу Ksteg извлекают из мультимедийных данных элементы последовательностей  выполняют процедуру деперемежения символов, формируя кодовые комбинации
выполняют процедуру деперемежения символов, формируя кодовые комбинации  выполняют процедуру их помехоустойчивого декодирования и, при необходимости, исправление искаженных символов, получая
выполняют процедуру их помехоустойчивого декодирования и, при необходимости, исправление искаженных символов, получая 
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К НЕРАВНОМЕРНОСТИ ПОТОКА ДАННЫХ ТЕЛЕИЗМЕРЕНИЙ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480838C2 |
| Способ безопасного кодирования информации для ее передачи по открытым каналам связи методами стеганографии | 2016 |
|
RU2649753C2 |
| СПОСОБ СКРЫТОЙ ПЕРЕДАЧИ ЗАШИФРОВАННОЙ ИНФОРМАЦИИ ПО МНОЖЕСТВУ КАНАЛОВ СВЯЗИ | 2011 |
|
RU2462825C1 |
| СПОСОБ ВСТРАИВАНИЯ СООБЩЕНИЯ В ЦИФРОВОЕ ИЗОБРАЖЕНИЕ ФОРМАТА JPEG 2000 | 2012 |
|
RU2517337C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

