ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в общем к услугам, основанным на определении местоположения посредством глобальной навигационной спутниковой системы (Global Navigation Satellite System, GNSS). Более конкретно, настоящее изобретение касается обеспечения идентификации спутников и частот спутников системы GNSS в спецификациях системы GNSS, использующей данные поддержки (Assisted GNSS, A-GNSS), посредством добавления информации о диапазоне частот к информационным элементам данных поддержки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Данный раздел предназначен для представления предпосылок создания или контекста изобретения, которое изложено в формуле изобретения. Описание здесь может включать концепции, которые могут быть осуществлены, но не обязательно те концепции, которые ранее были задуманы или осуществлены. Поэтому, если здесь не указано иное, то описанное в этом разделе не является описанием известного уровня техники для описания и формулы изобретения в этой заявке и не признается таковым вследствие включения в этот раздел.
Услуги по определению местоположения, основанные на местоположении мобильных устройств, становятся все более широко распространенными. Данные поддержки для навигационных систем с поддержкой, таких как система GNSS, были определены и стандартизированы для сотовых систем связи, например для таких навигационных систем, как глобальная система определения местоположения (Global Positioning System, GPS), европейская навигационная система Galileo и Российская глобальная навигационная спутниковая система ГЛОНАСС. Типичная система GNSS может включать сеть спутников, которая широковещательно передает навигационные сигналы, включающие данные расстояния и времени. Приемники GNSS принимают эти переданные широковещательные навигационные сигналы и вычисляют на их основе точное глобальное местоположение. Другие примеры системы GNSS включают, но не ограничиваются ими, спутниковые системы улучшенного определения местоположения (Satellite-Based Augmentation System, SBAS), локальные системы улучшенного определения местоположения (Local Area Augmentation Systems, LAAS), квазизенитные спутниковые системы (Quasi-Zenith Satellite Systems, QZSS) и гибридные приемники.
Доставка данных поддержки может быть основана на протоколах плоскости управления, специфических для сотовых систем, включая, например, протокол служб размещения радиоресурсов (Radio Resource Location Services Protocol, RRLP) для сетей глобальной системы мобильной связи (Global System for Mobile Communications, GSM), уровень управления радиоресурсами (Radio Resource Control, RRC) уровня 3 в сетях на основе широкополосного множественного доступа с кодовым разделением каналов (Wideband Code Division Multiple Access, WCDMA) и IS-801 для сетей на основе множественного доступа с кодовым разделением каналов (Code Division Multiple Access, CDMA). Следует отметить, что данные поддержки, описанные в настоящем документе, могут относиться к поддержке системы GNSS, включающей, но не ограниченной перечисленным, модели навигации, поддержку времени, опорные точки, атмосферные модели, дифференциальные коррекции, поддержку датчиков и поддержку в получении. Данные поддержки могут также включать, например, информацию о позиции, высокоточную информацию о позиции, данные измерений множества систем GNSS на многих частотах, измерения, получаемые в результате вычислений, измерения датчиков, информацию о маршруте и информацию о координатах точек маршрута.
Общие признаки имеются у большей части, если не у всех, протоколов, включая описанные выше протоколы для доставки данных поддержки, но не ограничиваясь ими. Однако, когда возникают различия, программное обеспечение терминала должно или иметь уровень адаптации для соответствующих протоколов, или ограничиваться поддержкой только некоторых, но не всех протоколов. Дополнительно, всякий раз, когда внедряется новая сотовая система связи (например, сети, использующие технологию всемирной функциональной совместимости для микроволнового доступа (Worldwide Interoperability for Microwave Access, WiMAX) или стандарт, такой как стандарт долгосрочной эволюции (Long Term Evolution, LTE), преемник GSM, терминал также должен приспосабливаться к специфическим особенностям этой системы/сети.
В ответ на это открытое сообщество производителей систем мобильной связи (Open Mobile Alliance, ОМА) определило протокол плоскости пользователей, названный протоколом безопасного определения местоположения для плоскости пользователей (Secure User Plane Location, SUPL) 1.0. Протокол SUPL использует каналы передачи данных плоскости пользователей для передачи информации поддержки для определения местоположения, такой как данные поддержки системы GPS, как описано выше, для передачи протоколов, связанных с технологией позиционирования, между терминалом, например устройством мобильной связи, и его операционной сетью. Протокол SUPL является альтернативой и в то же время дополнением к существующим стандартам, основанным на сигнализации в плоскости управления сети мобильной связи. Протокол SUPL предполагает, что сеть мобильной связи или другая сеть может установить соединение по каналу передачи данных между терминалом и сервером определения местоположения некоторого типа. Использование протокола плоскости пользователей особенно привлекательно в случае сетей на основе протокола Интернет (Internet Protocol, IP), в которых всегда имеется канал передачи данных.
В 2008 г. такие организации стандартизации, как проект партнерства третьего поколения (3rd Generation Partnership Project, 3GPP) и открытое сообщество производителей систем мобильной связи ОМА, ускорили работы по стандартизации поддержки GNSS для различных спутниковых систем, которые пока еще являются неподдерживаемыми в соответствующих спецификациях стандартов. Текущая поддержка в стандартах до сих пор была реализована только для систем GPS и Galileo. На следующем этапе поддержка должна быть расширена на модернизированную GPS, ГЛОНАСС, QZSS и ряд систем SBAS. Каждая из вышеупомянутых систем имеет определенные уникальные для этих систем характеристики и/или функции, которые нуждаются в особом внимании в отношении интегрирования таких функций в спецификации поддержки.
Современная система ГЛОНАСС (например, спутники ГЛОНАСС и ГЛОНАСС-М) использует схему множественного доступа с частотным разделением каналов (Frequency Division Multiple Access, FDMA) для разделения передач спутников друг от друга. Из-за использования доступа FDMA ни один из видимых спутников не передает сигнал точно в одном и том же диапазоне частот, при этом каждый спутник передает сигнал на своей собственной номинальной частоте. Однако та же самая номинальная частота передачи может быть назначена другому спутнику, хотя при этом спутники должны быть расположены на противоположных сторонах орбиты, чтобы не возникали взаимные помехи с любыми другими спутниками на той же частоте. Частоты передачи и используемые диапазоны частот ГЛОНАСС описаны в интерфейсном контрольном документе (Interface Control Document, ICD) ГЛОНАСС, в то время как используемое в настоящее время назначение частот спутников описано, например, на сайте http://www.glonass-ianc.rsa.ru. Кроме того, следует отметить, что спутники ГЛОНАСС, которые запущены после 2005 года, используют следующие частотные каналы: k=(-7…+6) из диапазона от -7 до 13 (то есть 21 значение).
Предполагается, что следующее поколение системы ГЛОНАСС будет использовать для разделения спутников схему CDMA, аналогичную схеме, используемой системой GPS. Таким образом, в следующем поколении системы ГЛОНАСС каждый спутник будет передавать сигнал точно на одной и той же номинальной частоте, но будет использовать различный расширяющий код (псевдослучайный код). Спутники ГЛОНАСС следующего поколения называются спутниками ГЛОНАСС-К.
Кроме того, спутники ГЛОНАСС располагаются на трех орбитах, обозначаемых как I, II и III. Каждую из этих трех орбит могут номинально занимать не более 8 спутников, давая максимальную номинальную группировку 3×8, то есть 24 спутника. В будущем группировка ГЛОНАСС-К может быть модифицирована, чтобы поддерживать большее число спутников, например до 30 спутников.
Группировка системы GPS также подвергается модернизации, при которой для открытых служб и военного использования назначаются новые частоты и сигналы. Дополнительно, новый контент данных добавляется к обычным навигационным данным для улучшения рабочих характеристик и предоставления новых услуг. Эти предстоящие изменения задокументированы и общедоступны в виде документов ICD.
Однако GPS является существующей системой, и ее услуги уже широко используются, что препятствует мгновенному процессу модернизации. Например, одной из задач для Министерства обороны США (US Department of Defense, DoD) в отношении модернизации системы GPS является развертывание новых спутников с новыми сигналами и услугами, которые должны постепенно заменить существующее поколение спутников. Размер группировки GPS не может превышать 32 спутника, и с 31 спутником в группировке в настоящее время при довольно длительном сроке службы спутников замена всей группировки системы GPS спутниками следующего поколения может занять 10-15 лет. Кроме того, модернизация системы GPS не включает только введение одного полностью нового поколения спутников, а скорее включает также рассмотрение ряда параллельных поколений спутников, перечисленных в таблице 1. Как можно видеть, поддерживаемые сигналы (и частоты) открытых служб значительно отличаются от поколения к поколению.
При использовании схемы FDMA нет необходимости в назначении спутникам разных расширяющих кодов. Все спутники системы ГЛОНАСС используют один и тот же псевдослучайный код для модуляции сигнала. В отличие от системы GPS, в которой каждый спутник имеет свой собственный псевдослучайный код, идентифицируемый номером псевдослучайного кода (Pseudorandom Code Number, PRN), сигналы ГЛОНАСС не обладают однозначной физической характеристикой для идентификации спутников. Кроме того, как указано выше, частота передачи в системе ГЛОНАСС может совместно использоваться несколькими спутниками. Эта невозможность однозначной идентификации может быть проблематичной с точки зрения службы данных поддержки, потому что может быть необходимо однозначное связывание некоторых частей данных поддержки с определенными спутниками, когда не может использоваться номер PRN или индекс частоты.
Кроме того, модернизация системы GPS может быть проблематичной с точки зрения системы GNSS с функцией поддержки (A-GNSS). Из-за процесса модернизации спутников GPS, описанного выше, число поддерживаемых сигналов может быть различным для различных спутников. Сверх того, поддержка может внезапно измениться для некоторого спутника (то есть идентификации спутника) после того, как он был заменен более новой версией. С точки зрения терминала, было бы выгодно априори знать, какие сигналы поддерживает спутник, чтобы избежать напрасного расходования мощности при получении несуществующих (неподдерживаемых) сигналов. В противоположном сценарии сведения относительно того, какие сигналы поддерживает спутник, предоставляли бы возможность поиска лучшего возможного сигнала для определенного спутника. Поскольку модернизация системы GPS осуществляется постепенно, могут возникнуть сценарии, при которых некоторые спутники, например спутники с последними сигналами L1C, дающими лучшую характеристику определения местоположения, видны вместе со спутниками, поддерживающими только L1CA. Кроме того, современные стандарты А-GNSS (A-GPS) не предусматривают указания для терминала, какому поколению принадлежит спутник или какие сигналы поддерживаются спутником. Следует отметить, что спутники систем SBAS и QZSS могут также иметь различную поддержку сигналов и частот среди спутников в одной и той же системе.
Спецификация радиотехнической комиссии для морских служб (Radio Technical Commission for Maritime Services, RTCM) (RTCM v3.0, 10 февраля 2004 г.) использует индексы орбитальной позиции (orbital slot) ГЛОНАСС для идентификации спутников. Хотя спутники ГЛОНАСС распределены по трем плоскостям, индекс орбитальной позиции непрерывен от орбиты к орбите, что позволяет осуществить идентификацию спутников. Сообщения RTCM несут также индекс частоты ГЛОНАСС. Как описано, например, на сайте http://www.glonass-ianc.rsa.ru, спутники ГЛОНАСС индексируются следующим образом: спутники на орбите I индексируются от 1 до 8; спутники на орбите II индексируются от 9 до 16 и спутники на орбите III индексируются от 17 до 24. Однако RTCM не обеспечивает решение по индексации/идентификации для различных поколений системы GPS.
Спецификации 0183 версии 3.01 (1 января 2002 г.) национальной ассоциации морской электроники (National Maritime Electronics Association, NMEA) описывают определение индексов спутников ГЛОНАСС в сообщениях NMEA. Спецификация 0183 NMEA использует номера позиций для идентификации спутников как 64 + номер позиции спутника. Номера позиций 1-24 используются для полной группировки ГЛОНАСС из 24 спутников, что в свою очередь дает диапазон 65-88 для использования с идентификационными номерами спутников ГЛОНАСС в сообщениях NMEA. Номера позиций 89-96 доступны, если номера позиций свыше 24 распределяются орбитальным резервам. Однако подобно RTCM, NMEA не обеспечивает решение по индексации/идентификации для различных поколений системы GPS.
Современные стандарты системы A-GPS/A-GNSS используют идентификацию спутников на основе номера PRN и не поддерживают спутники ГЛОНАСС. Идентификация спутников, например, в спецификациях RRLP для системы GSM является 6-битовым параметром, способным включать, например, 6-битовый номер PRN спутников Galileo. Кроме того, информационные элементы (Information Element, IE) в спецификациях данных поддержки иерархически организованы так, чтобы все специфические для спутниковой системы информационные элементы обозначались с использованием общей идентификации GNSS (GNSS Identification, GNSS ID), как, например, в системах GPS, Galileo, ГЛОНАСС и т.д.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с различными вариантами осуществления изобретения определяют первый параметр для обеспечения общей идентификации спутников, включая как идентификацию спутников на основе номера PRN, так и идентификацию спутников на основе номера орбитальной позиции. Первый параметр является универсальным идентификатором спутника для данных поддержки, который может использоваться для идентификации спутников как системы GPS, так и системы ГЛОНАСС. Второй параметр связывают с первым параметром, причем второй параметр указывает идентификацию частот и является опциональным/условным на основании того, используются ли спутники современной системы ГЛОНАСС и/или спутники системы ГЛОНАСС ближайшего будущего. Использование общей идентификации спутников и частот позволяет приемнику системы GNSS определить тип спутника, от которого принимается сигнал, а также определить, какие сигналы поддерживаются для конкретных спутников системы GPS.
Эти и другие преимущества и отличительные особенности различных вариантов осуществления данного изобретения вместе с организацией и способом его работы станут очевидными из следующего подробного описания, приводимого вместе с чертежами, где одинаковые элементы обозначены одинаковыми позициями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения описываются со ссылкой на прилагаемые чертежи, на которых:
фиг.1 представляет собой блок-схему, демонстрирующую процесс, посредством которого могут быть реализованы различные варианты осуществления данного изобретения;
фиг.2 представляет собой общую схему системы, в которой могут быть реализованы различные варианты осуществления данного изобретения;
фиг.3 представляет собой вид в перспективе электронного устройства, которое может использоваться при реализации различных вариантов осуществления данного изобретения;
фиг.4 представляет собой схематическое представление цепей, которые могут содержаться в электронном устройстве, показанном на фиг.3.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Различные варианты осуществления изобретения обеспечивают идентификацию спутников и частот для спутников GNSS в спецификациях A-GNSS. В соответствии с различными вариантами осуществления изобретения идентификация спутников и частот может использоваться универсальным способом, так что параметры, которые обычно зарезервированы для идентификации спутников посредством номера PRN, могут использоваться также для систем/спутников ГЛОНАСС. Дополнительно, идентификация спутников и частот задается так, что она является "совместимой с будущими системами". То есть такой же параметр идентификации спутников может использоваться для идентификации модернизированных спутников ГЛОНАСС-К, которые, вероятно, будут идентифицироваться кодами PRN, в то же время опционально перенося параметр идентификации частоты (например, индекс частоты), который является характеристикой существующих спутников ГЛОНАСС и спутников ГЛОНАСС ближайшего будущего. Кроме того, в соответствии с различными вариантами осуществления изобретения идентификация спутников и частот может опционально использоваться для указания поддерживаемых сигналов (частот) для спутников GPS.
В соответствии с различными вариантами осуществления изобретения существующие параметры идентификации спутников, традиционно используемые в стандартах данных поддержки, переопределяются так, чтобы также использовать их для идентификации ГЛОНАСС. Кроме того, опциональный или условный параметр связывают с параметром идентификации спутников для идентификации частот, где идентификация частот указывает значение (к) частоты FDMA. Такой параметр идентификации частот является опциональным, поскольку он является необходимым только для спутников современной системы ГЛОНАСС и/или ГЛОНАСС ближайшего будущего, например для спутников ГЛОНАСС-М. Следовательно, использование параметра идентификации частот может не быть необходимым и поэтому не включается/не связывается при рассмотрении следующего поколения спутников ГЛОНАСС, например спутников ГЛОНАСС-К. Следует отметить, что параметр идентификации частот может быть включен в информационный элемент (IЕ) сигнала спутника наряду с параметром идентификации спутников, если идентификатор ID системы GNSS указывает, что, например, сигнал принимается от системы/спутника ГЛОНАСС.
Идентификация спутника ГЛОНАСС с использованием параметра идентификации спутников выполняется аналогично RTCM и NMEA посредством использования номера орбитальной позиции для существующих спутников ГЛОНАСС. Однако для спутников ГЛОНАСС-К, использующих, например, модуляцию CDMA, используемый параметр идентификации спутников вместо этого может быть заменен номером PRN. Кроме того, приемник GNSS способен различать спутники ГЛОНАСС текущего и следующего поколений посредством определения, существует ли параметр идентификации частот в сигнале спутника. Способность приемника различать спутники ГЛОНАСС текущего и следующего поколений важна из-за фундаментального различия между схемами модуляции, используемыми в FDMA и CDMA. Таблица 2 иллюстрирует рассмотренные связи между идентификацией GNSS, идентификацией спутников и типами спутников в соответствии с различными вариантами осуществления изобретения. Следует отметить, что одинаковое/подобное отображение номера PRN и идентификации частот может быть опционально применено, например, к спутникам систем SBAS и QZSS.
Фиг.1 иллюстрирует блок-схему, характерную для процессов, выполняемых в соответствии с различными вариантами осуществления изобретения. Следует отметить, что больше или меньше процессов возможны в различных вариантах осуществления. Как показано на фиг.1, на шаге 100 задается первый параметр для того, чтобы осуществить как идентификацию спутников на основе номера PRN, так и идентификацию спутников на основе номера орбитальной позиции. То есть первый параметр является универсальным идентификатором спутника для данных поддержки, который может использоваться для идентификации спутников и системы GPS, и системы ГЛОНАСС. На шаге 110 второй параметр связывается с первым параметром, причем второй параметр указывает идентификацию частот. Как описано выше, указанный второй параметр является опциональным/условным на основании того, используются ли спутники современной системы ГЛОНАСС и/или спутники системы ГЛОНАСС ближайшего будущего.
Использование общей идентификации спутников и идентификации частот в соответствии с различными вариантами осуществления изобретения позволяет использовать одни и те же параметры для любой системы GNSS в контексте системы A-GNSS без необходимости внедрять специфические параметры для каждой системы GNSS. Дополнительно, идентификация частот несет информацию о сигналах и/или частотах, поддерживаемых каждым спутником GPS, так что приемник может оптимизировать получение им сигналов для улучшения рабочих характеристик при минимизации потребляемой мощности. Кроме того, обеспечивается будущая совместимость для модернизации ГЛОНАСС в направлении системы с модуляцией CDMA. Необходимо отметить, что идентификации на основе номера орбитальной позиции и на основе номера PRN являются взаимоисключающими и могут быть охвачены общей системой и способом идентификации спутников и частот в соответствии с различными вариантами осуществления изобретения. Кроме того, 5-битовый индекс частоты, рассмотренный здесь в качестве примера, оптимально подходит для использования как с индексом частоты ГЛОНАСС, так и с частотной маской GPS (то есть списком поддерживаемых сигналов GPS).
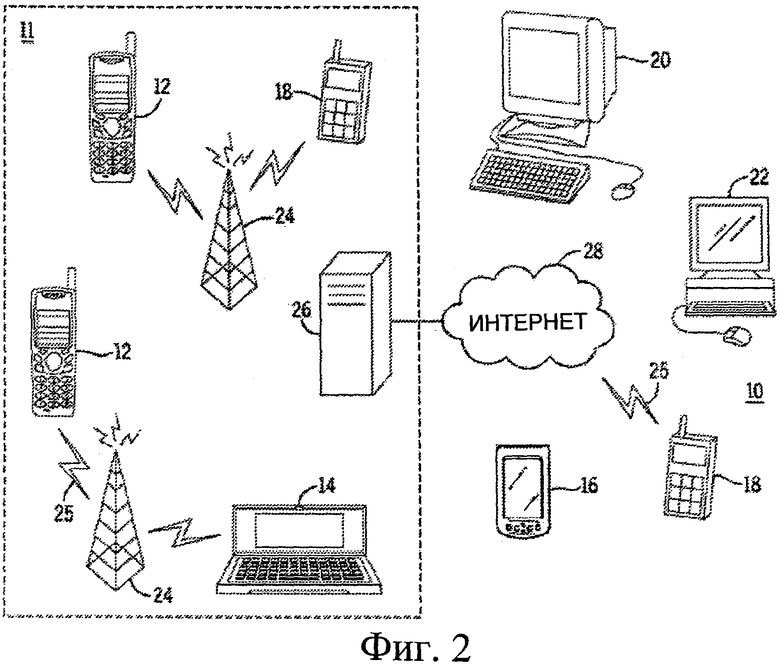
На фиг.2 показана система 10, в которой могут использоваться различные варианты осуществления данного изобретения, содержащая множество устройств связи, которые могут осуществлять связь посредством одной или нескольких сетей. Система 10 может содержать любую комбинацию проводных или беспроводных сетей, включая сеть мобильной телефонной связи, беспроводную локальную сеть (Local Area Network, LAN), персональную сеть Bluetooth, локальную сеть Ethernet, кольцевую локальную сеть типа Token Ring, глобальную сеть, Интернет и т.д., но не ограничивается указанными примерами. Система 10 может включать проводные и беспроводные устройства связи.
В качестве примера, система 10, показанная на фиг.2, включает сеть 11 мобильной телефонной связи и Интернет 28. Подключение к сети Интернет 28 может включать беспроводные подключения дальнего действия, беспроводные подключения ближнего действия, не ограничиваясь указанными примерами, и различные проводные подключения, включая телефонные линии, кабельные линии, силовые линии и т.п., но не ограничиваясь указанными примерами.
Приводимые в качестве примера устройства связи системы 10 могут включать электронное устройство 12 в виде мобильного телефона, комбинацию 14 персонального цифрового помощника (Personal Digital Assistant, PDA) и мобильного телефона, PDA 16, интегрированное устройство 18 передачи сообщений (Integrated Messaging Device, IMD), настольный компьютер 20, ноутбук 22 и т.д., но не ограничиваются указанными примерами. Устройства связи могут быть стационарными или мобильными, например носимыми человеком, который перемещается. Устройства связи также могут находиться в режиме транспортировки, включая транспортировку на автомобиле, грузовике, такси, автобусе, поезде, судне, самолете, велосипеде, мотоцикле и т.д., но не ограничиваясь указанными примерами. Некоторые или все устройства связи могут посылать и принимать вызовы и сообщения и осуществлять связь с поставщиками услуг посредством беспроводного подключения 25 к базовой станции 24. Базовая станция 24 может быть подключена к сетевому серверу 26, который позволяет осуществлять связь между сетью 11 мобильной телефонной связи и Интернетом 28. Система 10 может содержать дополнительные устройства связи и устройства связи различных типов.
Устройства связи могут осуществлять связь с использованием различных технологий передачи, включая в качестве примеров, не ограничивающих настоящее изобретение, множественный доступ с кодовым разделением каналов (CDMA), глобальную систему мобильной связи (GSM), универсальную систему мобильной связи (Universal Mobile Telecommunications System, UMTS), множественный доступ с временным разделением каналов (Time Division Multiple Access, TDMA), множественный доступ с частотным разделением каналов (FDMA), протокол управления передачей/протокол Интернет (Transmission Control Protocol/Internet Protocol, TCP/IP), службу обмена короткими сообщениями (Short Messaging Service, SMS), службу передачи мультимедийных сообщений (Multimedia Messaging Service, MMS), электронную почту, службу мгновенной передачи сообщений (Instant Messaging Service, IMS), Bluetooth, IEEE 802.11 и т.д. Устройство связи, используемое при реализации различных вариантов осуществления данного изобретения, может осуществлять связь с использованием различных сред, включая в качестве примеров, не ограничивающих настоящее изобретение, радио, инфракрасное излучение, лазерное излучение, кабельное соединение и т.п.
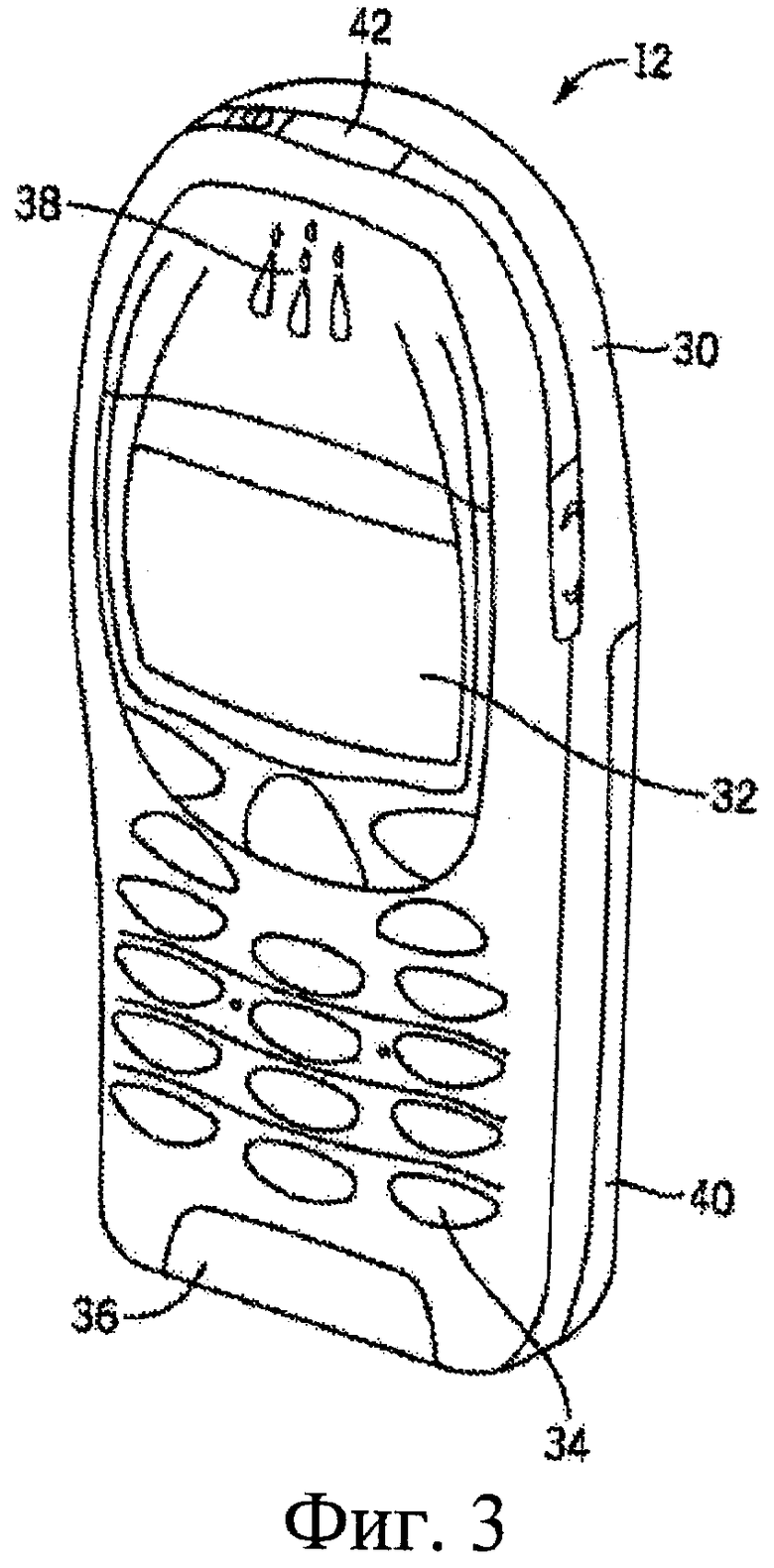
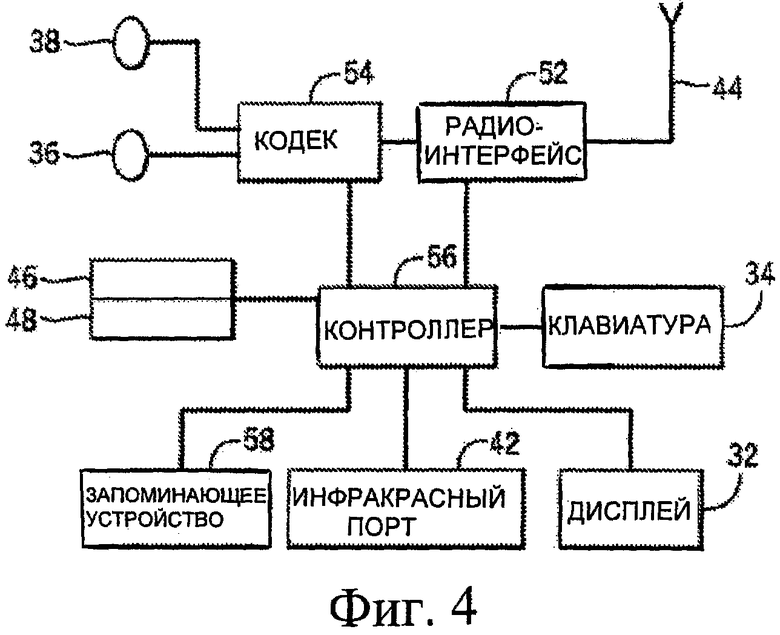
На фиг.3 и 4 показано одно типичное электронное устройство 12, в котором может быть реализовано настоящее изобретение. Должно быть понято, однако, что настоящее изобретение не ограничивается одним конкретным типом электронного устройства. Электронное устройство 12, показанное на фиг.3 и 4, содержит корпус 30, дисплей 32 в виде жидкокристаллического дисплея, специализированную клавиатуру 34, микрофон 36, динамик 38, батарею 40, инфракрасный порт 42, антенну 44, смарт-карту 46 в виде UICC (универсальной микропроцессорной карты, Universal Integrated Circuit Card) согласно одному из вариантов осуществления изобретения, устройство 48 считывания карт, схему 52 радиоинтерфейса, схему 54 кодека, контроллер 56 и запоминающее устройство 58. Все отдельные схемы и элементы являются схемами и элементами известного в данной области типа техники.
Различные варианты осуществления, рассмотренные здесь, описаны в общем контексте шагов или процессов способа, которые могут быть реализованы в одном варианте осуществления компьютерным программным продуктом, реализованным на машиночитаемом носителе, содержащем выполняемые компьютером команды, такие как программный код, выполняемый компьютерами в сетевых средах. Машиночитаемый носитель может включать съемные и несъемные запоминающие устройства, включая в качестве примеров, не ограничивающих настоящее изобретение, постоянное запоминающее устройство (Read Only Memory, ROM), оперативное запоминающее устройство (Random Access Memory, RAM), компакт-диски (Compact Disc, CD), цифровые универсальные диски (Digital Versatile Disc, DVD) и т.п. В общем, программные модули могут включать подпрограммы, программы, объекты, компоненты, структуры данных и т.д., которые выполняют конкретные задачи или реализуют конкретные абстрактные типы данных. Исполняемые машинные команды, связанные структуры данных и программные модули представляют собой примеры программного кода для выполнения шагов способов, раскрытых в данном документе. Конкретная последовательность таких выполняемых команд или связанных структур данных представляет примеры соответствующих действий для реализации функций, описанных такими шагами или процессами.
Варианты осуществления данного изобретения могут быть реализованы программными, аппаратными средствами и логикой приложений или комбинацией программных, аппаратных средств и логики приложений. Программные средства, логика приложений и/или аппаратные средства могут находиться, например, в чипсете, мобильном устройстве, настольном компьютере, портативном компьютере или сервере. Программные и веб-реализации различных вариантов осуществления изобретения могут быть выполнены стандартными методами программирования с логикой на основе правил и другой логики для выполнения различных шагов или процессов поиска в базе данных, шагов или процессов корреляции, шагов или процессов сравнения и шагов или процессов принятия решения. Различные варианты осуществления изобретения также могут быть частично или полностью реализованы с использованием сетевых элементов или модулей. Следует отметить, что слова "компонент" и "модуль", которые используются здесь и в формуле изобретения, предназначены для охвата реализаций, использующих одну или несколько строк программного кода, и/или аппаратных реализаций и/или оборудования для приема данных, вводимых вручную.
Отдельные и конкретные структуры, описанные в вышеприведенных примерах, следует понимать как представляющие типичные структуры средств для выполнения конкретных функций, описанных в нижеследующей формуле изобретения, хотя ограничения в пунктах формулы изобретения не должны интерпретироваться как представляющие собой ограничения "средство плюс функция" в случае, когда термин "средство" в них не используется. Кроме того, использование термина "шаг" в вышеприведенном описании не должно использоваться как создающее ограничение "шаг плюс функция". Что касается отдельных ссылок, включая выданные патенты, заявки на патент и иные публикации, описанные или упомянутые здесь, такие ссылки не предназначены и не должны интерпретироваться как ограничивающие объем формулы изобретения.
Вышеизложенное описание предпочтительного варианта осуществления настоящего изобретения было представлено с целью иллюстрации и описания. Оно не является исчерпывающим или ограничивающим варианты осуществления данного изобретения точной раскрытой формой, а модификации и разновидности возможны в свете вышеприведенных идей или могут быть получены в результате практического применения различных вариантов осуществления изобретения. Варианты осуществления изобретения, рассмотренные здесь, были выбраны и описаны для объяснения принципов и характера различных вариантов осуществления изобретения и его практического применения, чтобы позволить специалистам в данной области техники использовать настоящее изобретение в различных вариантах осуществления и с различными модификациями, которые подходят для конкретного рассмотренного использования. Особенности вариантов осуществления изобретения, описанные здесь, могут быть объединены во все возможные комбинации способов, устройств, модулей, систем и компьютерных программных продуктов.
Изобретение относится к области радиотехники, а именно к услугам, основанным на определении местоположения посредством глобальной навигационной спутниковой системы (GNSS), и может быть использовано для обеспечения идентификации спутников и частот спутников GNSS в спецификациях системы GNSS, использующей данные поддержки (A-GNSS). Технический результат заключается в обеспечении возможности использовать одни и те же параметры для любой системы GNSS в контексте системы A-GNSS без необходимости внедрять специфические параметры для каждой системы GNSS, оптимизации получения приемником сигналов для улучшения рабочих характеристик при минимизации потребляемой мощности и обеспечении будущей совместимости для модернизации ГЛОНАСС. Для этого для идентификации частоты опциональный или условный параметр связывается с параметром идентификации спутников, причем идентификация частоты указывает значение частоты для множественного доступа с частотным разделением каналов (FDMA). Такой опциональный параметр необходим для спутников современной системы ГЛОНАСС и/или системы ГЛОНАСС ближайшего будущего (например, ГЛОНАСС-М), но он не включается/не связывается при рассмотрении спутников ГЛОНАСС следующего поколения, например спутников ГЛОНАСС-К. Дополнительно, сигналы, поддерживаемые конкретными спутниками системы GPS, могут быть указаны с использованием общей идентификации спутников, 4 н. и 11 з.п. ф-лы, 4 ил., 2 табл.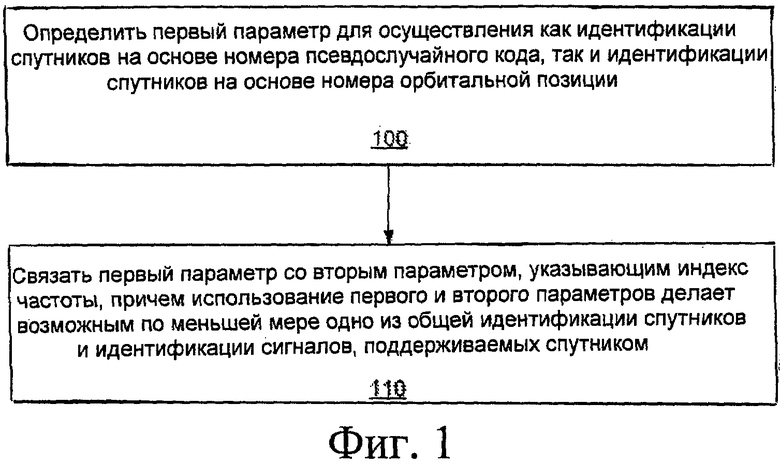
1. Способ идентификации спутников глобальной навигационной спутниковой системы, включающий
определение первого параметра для использования, в том числе по отдельности, как с идентификацией спутников на основе номера псевдослучайного кода, так и с идентификацией спутников на основе номера орбитальной позиции; и
связывание первого параметра со вторым параметром, который указывает идентификацию частоты, причем использование первого параметра и второго параметра делает возможным по меньшей мере одно из общей идентификации спутников и идентификации сигналов, поддерживаемых спутником, при этом наличие второго параметра обеспечивает различение спутников глобальных навигационных спутниковых систем ГЛОНАСС-М и ГЛОНАСС-К.
2. Способ по п.1, отличающийся тем, что первый параметр указывает по меньшей мере один из следующих спутников: спутник глобальной системы определения местоположения, спутник глобальной навигационной спутниковой системы ГЛОНАСС-К и спутник системы Galileo, если первый параметр включает идентификацию спутников на основе номера псевдослучайного кода.
3. Способ по п.1, отличающийся тем, что первый параметр указывает спутник глобальной навигационной спутниковой системы ГЛОНАСС-М, если первый параметр включает идентификацию спутников на основе номера орбитальной позиции.
4. Способ по п.1, отличающийся тем, что идентификация частоты указывает индекс частоты глобальной навигационной спутниковой системы.
5. Машиночитаемый носитель, включающий машинный код, сконфигурированный для выполнения процессов по любому из пп.1-4 при его исполнении устройством.
6. Устройство для идентификации спутников глобальной навигационной спутниковой системы, содержащее
средство для определения первого параметра для использования, в том числе по отдельности, как с идентификацией спутников на основе номера псевдослучайного кода, так и с идентификацией спутников на основе номера орбитальной позиции; и
средство для связывания первого параметра со вторым параметром, который указывает индекс частоты, причем использование первого параметра и второго параметра делает возможным по меньшей мере одно из общей идентификации спутников и идентификации сигналов, поддерживаемых спутником, при этом наличие второго параметра обеспечивает различение спутников глобальных навигационных спутниковых систем ГЛОНАСС-М и ГЛОНАСС-К.
7. Устройство по п.6, отличающееся тем, что первый параметр указывает по меньшей мере один из следующих спутников: спутник глобальной системы определения местоположения, спутник глобальной навигационной спутниковой системы ГЛОНАСС-К и спутник системы Galileo, если первый параметр включает идентификацию спутников на основе номера псевдослучайного кода.
8. Устройство по п.6, отличающееся тем, что первый параметр указывает спутник глобальной навигационной спутниковой системы ГЛОНАСС-М, если первый параметр включает идентификацию спутников на основе номера орбитальной позиции.
9. Устройство по п.6, отличающееся тем, что идентификация частоты указывает индекс частоты глобальной навигационной спутниковой системы.
10. Устройство по п.6, отличающееся тем, что процессы определения и связывания реализуются посредством чипсета.
11. Устройство по п.6, отличающееся тем, что оно представляет собой сервер.
12. Устройство мобильной связи, содержащее
средство для приема данных поддержки и
средство для проверки данных поддержки, чтобы определить, присутствует ли идентификация частоты в указанных данных поддержки, причем присутствие идентификации частоты совместно с идентификацией спутников на основе номера орбитальной позиции указывает, что сигнал спутника принимается от спутника глобальной навигационной спутниковой системы ГЛОНАСС-М.
13. Устройство по п.12, дополнительно содержащее средство для определения, включает ли идентификация спутников, принимаемая в данных поддержки, идентификацию спутников на основе номера псевдослучайного кода или идентификацию спутников на основе номера орбитальной позиции.
14. Устройство по п.12, отличающееся тем, что идентификация частоты указывает индекс частоты глобальной навигационной спутниковой системы.
15. Устройство по п.12, отличающееся тем, что процессы приема и проверки реализуются посредством машинного кода на машиночитаемом носителе.
| WO 2007099196 A1, 07.09.2007 | |||
| ВСПОМОГАТЕЛЬНЫЕ СООБЩЕНИЯ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ В СОТОВЫХ СИСТЕМАХ СВЯЗИ И СПОСОБЫ ДЛЯ ИХ РЕАЛИЗАЦИИ | 2002 |
|
RU2297715C2 |
| US 2007275658 A1, 29.11.2007 | |||
| WO 2008035143 A1, 27.03.2008 | |||
| US 2002005801 A1, 17.01.2002 | |||
| WO 2005008273 A1, 27.01.2005. | |||

